基于机器学习检测相位畸变后的涡旋光束轨道角动量
2022-02-22史晨寅韦宏艳贾鹏岳新宇
史晨寅,韦宏艳,贾鹏,岳新宇
(太原理工大学物理与光电工程学院,太原030006)
0 引言
涡旋光通信是将涡旋光束的轨道角动量(Orbital Angular Momentum,OAM)用于自由空间光通信中[1-2],其每个光子都携带lℏ 的OAM,ℏ 为约化普朗克常数,l是OAM 态,理论上可取−∞~+∞[3],因此可以使通信速率数量级增加。目前,对于涡旋光束轨道角动量检测的方法主要包括光学方法和机器学习方法。光学方法主要基于干涉和衍射原理[4-7],针对在自由空间中传输的涡旋光束OAM 态,检测范围最高达±20,不能检测到高范围的涡旋光束OAM 态,并且操作复杂。利用深度学习的方法检测涡旋光OAM 态范围最高到110,准确率为70%[8]。然而,载有信息的涡旋光在大气信道中传输时不可避免会受到大气湍流的干扰,光束强度随机起伏,相位发生畸变[9-12],增加了涡旋光束轨道角动量检测的难度。如何检测相位畸变后涡旋光束的轨道角动量成为亟待解决的问题。2019年,WANG Zikun 等[13]应用卷积神经网络对湍流中10 种单一的OAM 态进行研究,检测范围最大为10;同年SUN Ridong 等[14]从光束中分析得到三个指标的数值,结合信标光,利用支持向量机的方法可以检测出OAM 态为60 的涡旋光束;2020年YUAN Hao 等[15]基于深度学习方法对湍流中的OAM 态进行高精度识别,但是该方法需在固定的湍流环境下才能有效判断,并且未研究高范围OAM 态检测。
本文提出了基于卷积神经网络(Convolutional Neural Networks,CNN)方法,以实现涡旋光束经过未知强度大气湍流后的高范围OAM 态的检测。该方法具有较高的准确率和学习效率,无需已知湍流强度再检测,并且能够检测高范围的OAM 态,减少了通信系统元件数量,能够为扩大通信容量提供很好的理论基础,大大降低了系统复杂度的同时提高了涡旋光束的检测率。
1 理论分析
1.1 各向异性大气湍流模型
大气湍流在高空中表现出明显的各向异性,在non-Kolmogorov 湍流模型的基础上引入了各向异性系数Φn(κ)[16],表示为
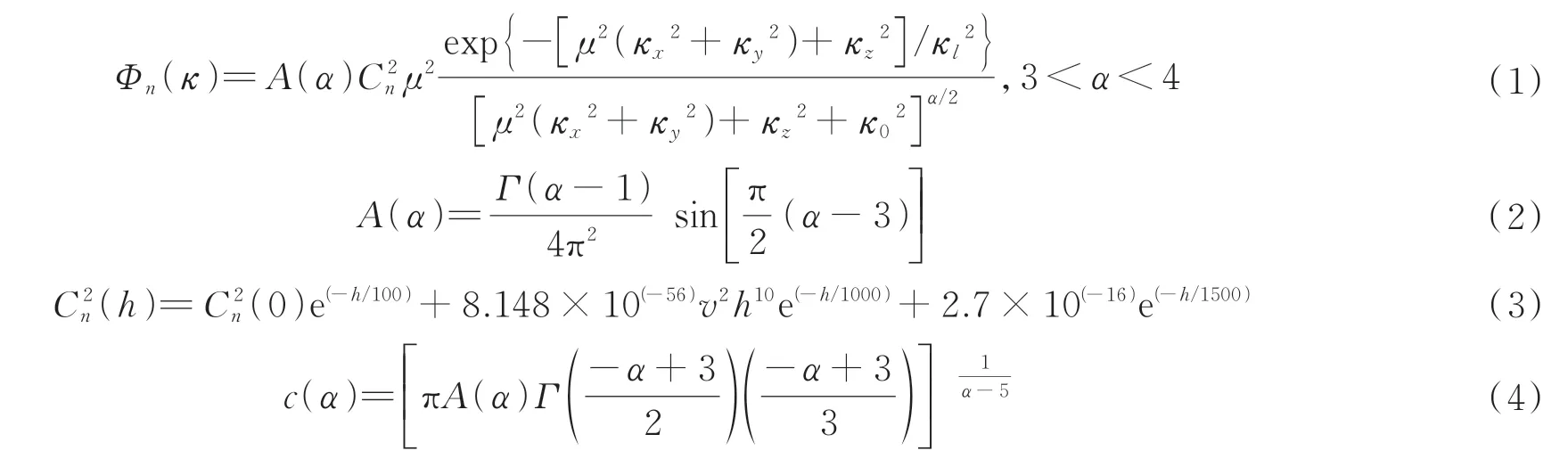
式中,α表示non-Kolmogorov 湍流功率谱指数,表示湍流折射率结构常数,随空间高度变化而变化[17],μ表示大气湍流各向异性系数,κx、κy、κz分别表示空间波数κ在x、y、z方向上的分量,κ0=4π/L0,κl=c(α)/l0,l0、L0分别表示湍流的内、外尺度,Г()为伽马函数,h表示高度(单位:m),v表示均方根风速(单位:m/s)。
在构建相位屏的过程中考虑了大气湍流的内外尺度。实际大气湍流信道中湍流外尺度随高度变化[18],表达式为

因此,本文在构建大气湍流相位屏时考虑了内尺度及随高度变化的外尺度效应。
1.2 拉盖尔高斯涡旋光束
在柱坐标系下,拉盖尔高斯(Laguerre-Gaussian,LG)涡旋光束在源处场强[19]为

式中,E0表示归一化振幅,w0表示基模束腰半径,为缔合拉盖尔多项式。l表示OAM 态或者拓扑荷数,p表示径向指数。exp(−ilθ)表示能够携带OAM 信息的相位因子。
携带信息的LG 光束经过大气湍流传输时,其相位会受到扰动,从而使光强发生随机起伏。图1 模拟了LG 涡旋光束在传输过程中受到大气湍流影响的情况。
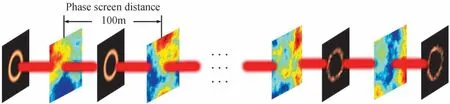
图1 多相位屏法模拟LG 光束在大气湍流中传输示意图Fig.1 Simulation diagram of LG beam propagation in atmospheric turbulence by multi-phase screen method
1.3 卷积神经网络的分类模型
CNN 可以自动提取图像特征,解决了传统方法表征能力有限的问题,对单目标的识别分类具有很好的效果。在CNN 的结构设计中,如果CNN 模型过深,计算复杂度会很大,可能会产生严重的过拟合;如果CNN 模型太浅,将无法有效地提取图像的特征,从而产生较差的识别准确率。因此设计的基于CNN 的OAM 识别模型共有12 层,包含3 个卷积层、3 个归一化层、3 个池化层、2 个全连接层和1 个输出层,总体框图如图2所示。首先将大小为512×512 的畸变后涡旋光束光强图处理为227×227 的图像,输入卷积层提取其主要特征后到达归一化层进行归一化处理,然后进入池化层去除冗余信息;将卷积得到的矩阵展平,连接全连接层,以便能够映射到样本标记空间,两层全连接的输出节点数分别为1 600、512,最后输出层的节点个数等于OAM 模式的个数。
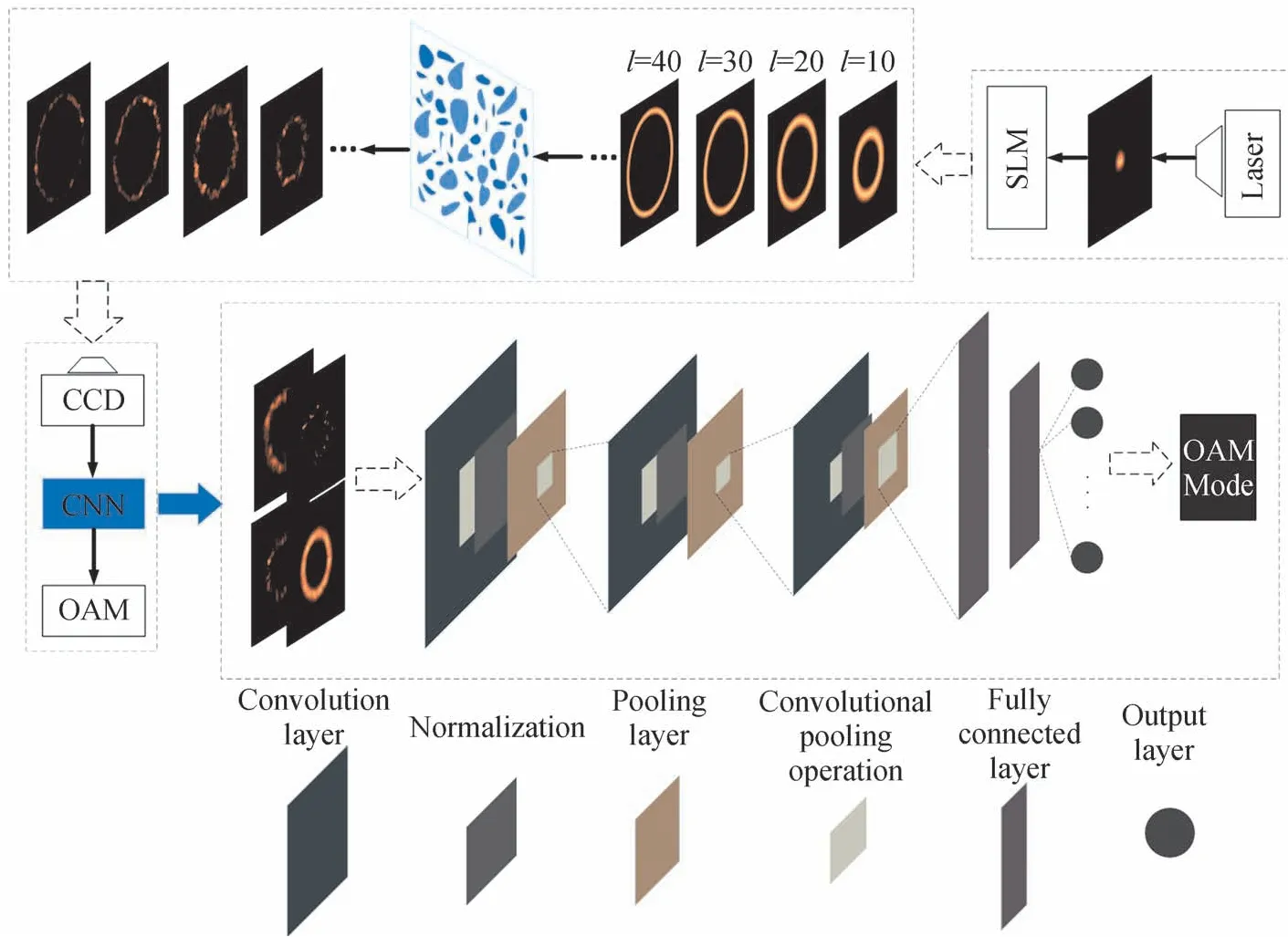
图2 OAM 模式识别总体框图Fig.2 General block diagram of OAM pattern recognition
为了实现更好的识别性能,对CNN 结构进行了优化设计:在每前两层卷积中加入填充操作,这样可以使边缘数据被用到;每一层卷积之后的归一化层对数据进行归一化处理,防止出现过拟合情况;采用最大池化层减少错误率;使用Relu 激活函数加快网络的收敛速度;使用Softmax 分类器很好地识别大气湍流下涡旋光束高阶OAM。
2 仿真结果与分析
利用MATLAB 仿真大气湍流环境下LG 涡旋光束强度分布图像,CNN 算法和设计的相位畸变后涡旋光OAM 态的检测算法分别由PyTorch 平台和Python 语言实现。
2.1 数据集
提出的CNN 识别方法的训练集和测试集是根据多相位屏方法模拟的不同径向指数LG 光束在不同大气湍流强度下传输不同距离的强度图像。大气湍流结构常数C2n的取值为10-13,10-14,10-15,10-16,10-17。由于大气湍流的随机性,为了使模型具有普遍适应性,在每个样本中分别随机模拟10 次大气湍流下的涡旋光光强图像。部分数据集如图3-4所示。

图3 不同湍流强度下涡旋光光强图像Fig.3 Vortex light intensity images under different turbulence intensity

图4 不同径向指数和传输距离下的涡旋光光强图像Fig.4 Vortex light intensity images with different radial exponents and transmission distances
2.2 接收屏设置
因涡旋光强度分布的中空半径与OAM 态成正比,所以能否接收到完整涡旋光强度图像与接收屏的大小有关。过大的接收屏会造成图像中无用信息过多,训练困难;过小的接收屏不能接收到完整的涡旋光光束图像,使检测的误差增大,因此应选择合适接收屏接收不同范围的涡旋光束。
设置接收屏的像素为512×512,每一格的间距分别为1 mm、1.5 mm 和2 mm。在这三种大小的接收屏下,当径向指数p=0、传输距离L=1 000 m、波长λ=1 550 nm 时,能够接收到的最大涡旋光OAM 态分别约为40、100 和160。因此,分别在这三种情况下,将模拟的l=1~40、l=1~100 以及l=1~160 的光强图像作为样本数据。其中90%的数据当作训练集,10%的数据当作测试集,使用的数据量如表1所示。

表1 光束参数与训练参数Table 1 Beam parameters and training parameters
2.3 检测结果与分析
在实际应用中,无法实时得到大气湍流的强度,模型只有在已知固定大气湍流强度下训练才能具有很好的效果,不能适用于实际的系统。因此在不确定的湍流环境下,对不同OAM 进行训练、检测。
图5 给出了300 轮训练时未知湍流强度下涡旋光束OAM 检测的准确率。识别准确率随着训练轮数的增加而增加,且逐渐趋于稳定,当接收屏的大小为51.2 cm×51.2 cm 时,能接收到最大OAM 态l=40,识别准确率为94%。加大接收屏,能接收到的最大OAM 态增高,网络学习更加困难,但是还是保持着较高的准确率。将接收屏的每个网格间距逐渐加0.05 cm,探究接收屏大小与检测准确率的关系。当接收屏的长为76.8 cm 时,能够接收到的最大OAM 态l=100,准确率为90%;当接收屏的长为102.4 cm 时,能够接收到的OAM 态高达160,此时设计的网络也能很好地进行学习与检测,准确率为87%。结果表明:检测准确率随着接收屏的增大而减小。这是因为屏越大,能接收到OAM 态越高,而OAM 越高的涡旋光受湍流影响越严重,其图像特征越不明显,导致训练效果不太好,因此随着拓扑荷数增大检测概率降低。但是,接收屏大小一定时,所有能被接收到的涡旋光束拓扑荷数的检测准确率是相同的。

图5 未知湍流强度下涡旋光束高OAM 的识别准确率Fig.5 Accuracy of high OAM identification in unknown turbulence
将湍流强度固定,在C2n=10-13、10-14、10-15、10-16、10-17的条件下下对模型进行训练,与未知湍流环境进行对比测试,结果如图6所示。可见固定湍流环境训练,对高强度湍流下的高轨道角动量的涡旋光检测并不理想,在不确定的湍流环境下,由于扩大合并了数据集,识别效果更好。

图6 不同湍流环境下检测对比Fig.6 Comparison of detection in different turbulent environment
为了保证算法模型具有很好的鲁棒性,对不同传输距离、不同径向指数、不同基模束腰半径以及不同波长下l=100 的OAM 进行网络训练以及检测,如图7所示。传输距离L为1 000 m、2 000 m、3 000 m、4 000 m时,模型对OAM 识别准确率分别为90%、80%、79%和78%。径向指数p为0、1、2、3 时,识别准确率为90%、85%、80%和79%。束腰半径w0为0.02、0.03、0.04、0.05 时,模型识别准确率分别为90%、87%、83%、82%。波长λ为1 550 nm、1 310 nm、850 nm 时,识别准确率分别为90%、88%、86%。

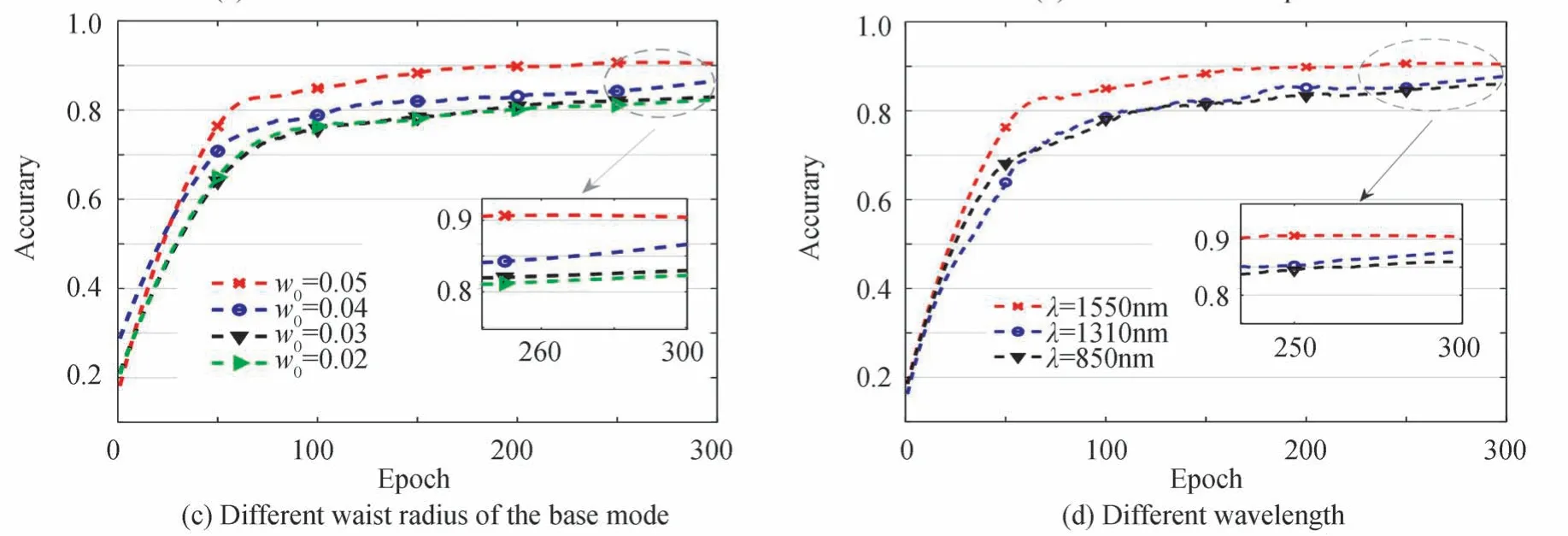
图7 不同情况下高OAM 识别的准确率Fig.7 High OAM recognition accuracy under different conditions
3 结论
本文优化了卷积神经网络,首先将畸变后的光强图像压缩,然后进行特征提取、端到端学习,最后将图像映射到涡旋光束轨道角动量模式,进而实现对受湍流扰动的涡旋光束OAM 态的检测,可检测到的OAM态范围为1~160。测试结果表明:1)相同条件下,检测准确率受接收屏大小的影响,接收屏越大检测准确率越小;2)在未知湍流环境下能有效识别不同径向指数、不同传输距离、不同基模束腰半径、不同波长的涡旋光束高范围OAM 态,识别准确率在78%以上;3)对OAM 态范围为1~40、1~100、1~160 的涡旋光束进行检测,准确率分别达94%、90%、86%。优化后的CNN 为快速识别相位畸变后涡旋光束的OAM 模式提供了切实可行的方法,该方法鲁棒性好,具有检测精度高、范围广、移植性强的特点,在自由空间光通信和量子通信等方面具有应用潜力。