安保机器人数字孪生系统研究
2022-02-21刘平利王国庆石晓华孙士涵
刘平利,王国庆,王 辉,石晓华,程 汉,孙士涵
(长安大学 工程机械学院,陕西 西安 710064)
0 引言
安保机器人作为新型的智能化安防设备,愈发受到人们的关注[1]。由于安保机器人物理结构复杂,控制系统精度要求高,其实时数据采集、数字端的传感器信号处理等问题致使安保机器人开发周期长、开发难度大。为解决这一问题,该文将数字孪生[2]技术应用到安保机器人的开发中去。
数字孪生技术已经被应用到了多种机器人上。文献[3]提出了一种基于数字孪生技术的煤矿井下智能掘进机器人监控技术,通过对智能掘进机器人系统及其组件进行数字孪生实例化设计,实现智能掘进机器人群掘-支-运平行作业协同控制。文献[4]提出一种基于数字孪生的巡检机器人系统,通过数字孪生系统物理层和模型层的双向数据传输,实现机器人相机朝向的实时优化和虚实机器人的状态同步,获取待检测区域的真实图像和标准数模图像,通过虚实图像对比获取检测结果,并使用多种可视化手段将检测结果回馈给现场工人。
该文将数字孪生技术和安保机器人相结合,设计了一个安保机器人数字孪生系统,并对系统中各个子模块进行了详细设计,用来实现对安保机器人的监控和二次开发。
1 安保机器人数字孪生系统总体设计
安保机器人数字孪生系统主要由系统管理模块、系统监控模块和功能模块组成。系统管理模块实现对该系统的管理,系统管理模块包括登录界面和主操作界面,用户只有成功登录后才能对系统进行操作;系统监控模块包含电机参数监控界面、传感器数据采集界面、机器人运动监控界面,系统监控模块主要对安保机器人的运动和各主要部件的运行状况进行监控,并做出一定的调整;功能模块包括数字信号处理模块和机器人二次开发模块,主要是实现机器人本体的二次开发和数字信号处理[5]。安保机器人数字孪生系统总体框架如图1所示。
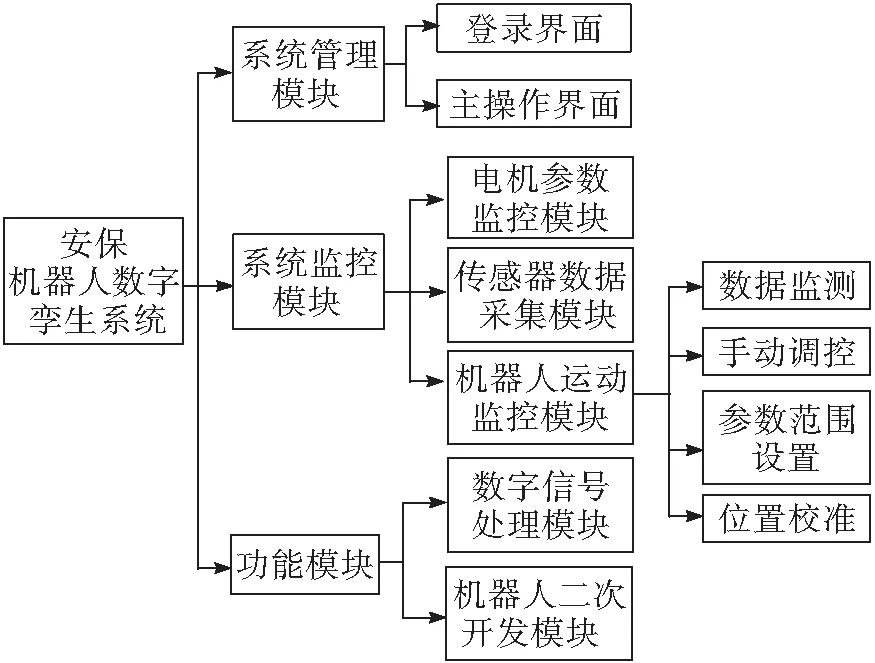
图1 安保机器人数字孪生系统的总体架构
2 系统管理模块设计
用户登录安保机器人数字孪生应用系统时需要对账号和密码进行识别与认证,当两者同时与数据库表单匹配时,才能登录成功;用户登录成功后系统根据用户在下拉框选取的用户类型提供相应的权限。登录界面如图2所示。

图2 登录界面
用户登录成功后,会进入数字孪生应用系统的主操作界面。主操作界面集成了室内高机动性安保机器人数字孪生应用系统的所有功能,包含系统监控、功能模块、用户管理和系统设置等功能,各主要功能下拉菜单对应着相应的子功能,且后期根据需求可进行功能拓展。安保机器人数字孪生系统的主操作界面如图3所示。

图3 主操作界面
3 系统监控模块设计
监控系统包含的主要模块有电机参数监控模块、传感器参数采集监控模块和机器人运动监控模块。在安保机器人原型系统中,安保机器人的移动转向由驱动电机和转向电机进行控制,超声波传感器对机器人运动过程的距离进行测量,加速度计和陀螺仪模块完成安保机器人加速度和角速度等参数的测量,以上所有数据的实时展示和处理均需要系统监控模块来实现,以便评估安保机器人的运动状态,并进行控制。系统监控模块的总体操作界面如图4所示。
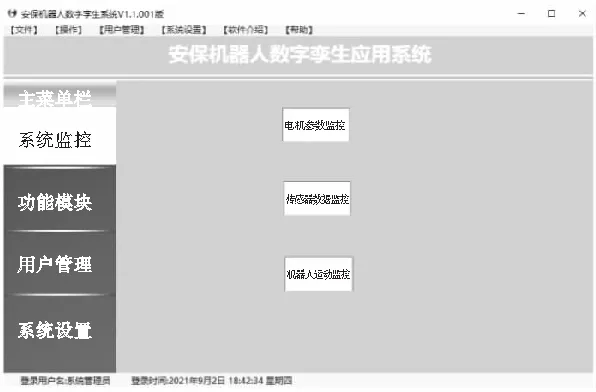
图4 系统监控模块操作界面
3.1 电机参数监控模块设计
电机参数监控模块主要是对控制器中双直流电机和双步进电机的实时数据进行采集和监控,并以图像化的形式展示实时数据,将失去时效性的电机转速和转向数据压缩存储至历史数据库。
电机参数监控模块界面如图5所示。通道A、通道B分别代表直流电机监控界面、步进电机监控界面,这2个监控界面之间可以实时切换以满足不同需求。监控界面设定了电机转速极限值,当电机转速超过极限值时会发出预警,以避免转速过高而产生一些意外。

图5 电机参数监控模块界面
3.2 传感器数据采集模块设计
安保机器人在运动时,主要的传感器数据来源于超声波测距传感器、陀螺仪和加速度传感器,超声波测距传感器主要测量距离,陀螺仪和加速度传感器用来测量安保机器人实时运动的角速度和加速度。为了便于直观地显示实时数据,设计了二维曲线图对数据进行可视化显示。图6所示是以超声波距离传感器为例的数据采集模块界面,对实时数据进行处理后,横轴、纵轴分别表示时间、距离。图中左侧为传感器数据的实时显示界面,右侧为使用者修改图表属性的交互界面。传感器数据采集模块可对图表的属性自定义修改,以满足不同的使用需求。

图6 传感器数据采集模块界面
3.3 机器人运动监测模块设计
为了对室内高机动性安保机器人的实时运动进行监控和控制,机器人运动监测模块分为数据监测、手动调控、参数范围设置和位置校准4部分。其中,数据监测主要实现对机器人位置、速度、加速度和角速度的实时监控;手动调控主要用于机器人不能进行自主定位或进行调试时,将机器人的控制模式切换为手动控制,控制机器人的运动;参数范围设置是为了控制机器人在指定的坐标方位内活动,当超过限定值时会警报通知;位置校准功能用以对定位误差进行校验。此外,可以通过“紧急停止”按钮使机器人迅速停止。安保机器人运动监控模块界面如图7所示。

图7 运动监控模块界面
4 功能模块设计
功能模块主要涉及数字孪生应用系统的数字信号处理功能模块和机器人二次开发功能模块。数字信号处理功能模块主要用来实现对传感器信号处理,机器人二次开发功能模块主要是用来实现同一类机器人的快速开发。
4.1 数字信号处理功能模块设计
数字信号处理功能模块在数字孪生系统中可实现用户输入和实时数据获取输入两种模式,具有信号生成、信号运算、信号变换以及滤波与加窗的功能,用户界面如图8所示。

图8 数字信号处理界面
4.2 机器人二次开发模块设计
安保机器人主要由底盘、头部、壳体、机械臂等部分组成。底盘等没有固定的标准,往往按实际加工的需要开发、生产出相应的部件。机器人二次开发功能模块可对机器人底盘等进行参数化设计和自动化装配,使得零件可以按照需求进行形状、尺寸的修改,并一键生成装配体,有效提高同一类机器人的设计开发效率。用户在数字孪生应用系统上点击机器人二次开发模块后,系统会与SolidWorks建立连接,连接成功后会出现零件生成和自动化装配选择界面,可根据需求进行点击,如图9所示。

图9 机器人零件选择界面
以机器人底盘设计为例。点击底盘按键后会弹出底盘下零件的选择界面,对零件参数化做进一步选择,然后对需要改变参数的零件进行新的参数设计,完成后选择需要生成的装配体(例如底盘),接着点击自动化装配,得到参数化驱动下的底盘自动化装配模型,如图10所示。

图10 底盘自动化装配效果图
5 结语
该文对安保机器人数字孪生系统进行了设计,详细设计了系统管理模块、系统监控模块及功能模块,实现了对安保机器人数字孪生系统的管理,机器人主要部件的参数监控,传感器数据的采集和处理,以及同类型机器人的二次快速开发。
