基于STC89C51的液压自动调平系统设计
2022-02-21徐世许刘镔震王京擘
肖 克,徐世许,刘镔震,王京擘
(青岛大学 自动化学院,山东 青岛 266071)
0 引言
车载蜂箱搬运设备的吊臂固定在油缸支撑的车载平台上,此平台为一个圆盘。在使用时由于设备需要从折叠状态立起来,不能保证立起后搬运设备平台处于水平状态,手动调平很难使平台处于水平状态,平台的水平误差会使两米长的吊臂产生较大幅度的倾斜,不能保证抓取的蜂箱能够平稳的移动,所以要设计调平系统来使平台处于水平状态。本系统为了弥补传统手动调平的不足,研究了一种了以MCU(单片机)为核心的液压调平系统,该系统包括手动调平和自动调平两种模式。本系统通过控制比例换向阀的开度,来调节流入调平支撑腿上的油量及方向,从而调节支撑腿的伸缩完成调平,并且该系统采用三点调平方法,固定一点不动只调节另外两点,避免了出现因坡度和负载较大造成油缸活塞杆折断的问题。用Keil uVision5软件编写控制程序来控制油缸上升的速度,可以缩短整个调平时间,保证调平精度。方案中设计的车载液压调平设备主要用于野外辅助人工搬运沉重的物体,节省人力,提升搬运的效率。
1 调平系统总体设计
调平平台使用3点支撑方法,由3个撑腿提供支撑,一根撑腿固定,撑腿A和撑腿B接比例换向阀,撑腿A与固定撑腿组成的平面垂直于撑腿B与固定撑腿组成的平面,图1为设备的支撑示意图。由于调平系统需要实时检测角度并且保持高度可靠性因此采用以单片机为基础的控制器,可以保证系统的稳定。
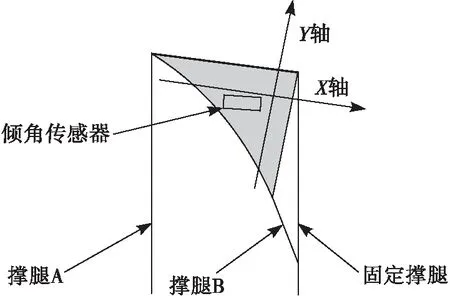
图1 设备支撑示意图

图2 液压调平设备实物图
该系统包括撑腿、双轴倾角传感器、以STC89C51单片机为基础的控制器、比例换向阀、低压电源、控制面板、数码管和接近传感器等。
系统自动调平的原理如图3所示。

图3 系统自动调平原理
该设计选取一点固定调节另外两点的方法进行调平,调平方案包括下面两个阶段:第一阶段,立起设备;第二阶段,根据平台倾角进行调平。在调平的时候,可伸缩的撑腿升高到与固定撑腿最高点同一水平线位置,此时平台就是水平的[1]。自动调平具体流程如图4所示。

图4 自动调平流程
调平包括手动和自动两个模式,两个模式用旋钮进行选择。手动模式是指操作员根据数码管显示的倾角用操纵杆调节撑腿来调整平台,调平期间操纵杆的模拟量信号经过程序进行转换为比例阀可以接收的电压信号从而控制开度进行调平,到达水平时接近传感器发出信号关闭液压,撑腿动作停止;自动模式是通过编写MCU程序,点击按钮就可实现圆盘自动调平。在自动调平期间,倾角传感器传递平台的倾角数据到控制器,控制器通过编好的程序分析倾角信息进而输出模拟量电压信号来决定撑腿是否需要上升以及上升的速度,最后用电压信号决定比例换向阀开度从而控制油缸,使撑腿以给定的速度伸缩,最终平台达到水平状态[2]。
2 调平系统控制器设计
根据应用需求,本控制器包括核心控制模块、AD模块、DA模块、485通讯模块,使用立创EDA完成整体设计,各模块设计如下。
2.1 核心控制模块
因为单片机的灵活性和经济性,该系统选用STC89C51系列单片机作为主控制器来完成对硬、软件的设计,最终达到对调平系统的控制[4]。
2.2 AD转换模块
在手动模式下,操作员需要移动操纵杆控制油缸撑腿上下,此时操纵杆的输出为模拟量信号,因此需要AD模块将操纵杆的模拟量信号转换为数字量信号再传输到MCU中,该系统采用ADC0809CCV模块进行设计。
2.3 DA转换模块
由于需要通过电压信号的大小来决定比例换向阀的开度,因此MCU需要接DA转换模块将MCU输出的数字量信号转换为模拟量电压信号,该系统中选用DAC0832L模块进行设计。
2.4 485通信模块
由于倾角传感器和数码管是RS485通信协议,因此MCU需要接485通信模块使MCU与倾角传感器和数码管通信,该系统中选用MAX485模块,MAX485电路如图5所示。MAX485电路为两个,倾角传感器的A,B线和数码管的A,B线分别接两个MAX485电路中的A和B两个引脚[3]。

图5 MAX485电路
3 调平系统硬件设计
将倾角传感器安装在平台的中间,方便倾角传感器测量平台X,Y轴的倾角并将倾角数据传输到控制器,然后完成对平台状态的闭环控制。操作面板上面的按钮分别与控制器的数字量输入接口相连,可以根据具体工作情况选择手动调平或自动调平。为了操作人员实时观察X,Y轴与水平面的倾角,因此将数码管接入控制器的RS485接口用来显示倾角。自动模式下,控制器依据平台的水平状态以及撑腿的行动状态信息决定下一步的动作和开度,进而让比例换向阀操纵撑腿升降,最终让平台达到水平。
该系统中用24 VDC电源给外部器件供电,由于控制系统外部提供的是+24 VDC电源,故购买DC-DC降压模块进行电压变换为控制系统供电。
调平时,控制器向倾角传感器发出读取倾角传感器数据的指令,此时MCU读取的数据帧为32位浮点数,通过程序换算为传感器与水平面实际的夹角。控制器依靠倾角传感器的角度信息输出两路不同的模拟量来决定双比例换向阀的开度,主要是通过-10 V到10 V范围内的电压信号控制阀门的开合幅度,以此决定油缸的进油量和出油量,最终控制油缸升降速度。控制器在向倾角传感器发送读取命令的同时也向数码管发送显示指令,最后数码管接收控制器转换完成的实际角度并显示。
液压泵接MCU的数字量输出,由MCU数字量输出决定液压泵是否启动。将设备的调平分为自动、手动两种模式,同时为了设备使用的便捷性设计了回原点和撑杆档位。因此要将控制面板上的各模式开关分别接在MCU不同的数字量输入,同时在程序中对各模式完成设计。

图6 硬件结构
4 调平系统软件设计
系统软件包括控制算法、总控部分、初始化部分、信号收集以及转换部分。
(1)控制部分主要对系统的总体结构进行控制,发出指令,让各部分进行相关运动;
(2)系统初始化部分就是在系统运行之前进行检查,排除一切可能影响到正常工作的因素,并对控制系统进行复位;
(3)信号收集及转化部分是对倾角传感器信号和控制器输出信号的采集与转换。
4.1 控制算法设计
在调平过程中存在稍微震动情况,而且为了保证调平精度需要分为粗调和细调,因此需加入适当的调节算法使系统达到目的。液压进油自带积分效果,因此,该系统采用比例算法来实现自动调平[5]。它原理简单,容易实现,只需要在现场调试比例系数就可实现快速自动调平。
4.2 程序设计
该系统的程序设计使用Keil uVision5编程软件根据不同模块实现的功能可把整个程序分为通信程序、AD程序、DA程序、比例调节算法程序4个部分,其中通信程序、AD程序、DA程序为.h格式文件,比例调节算法程序调用3个头文件,4个程序放在同一工程文件夹,最后将程序下载到MCU中。
5 调试验证
利用实物在现场调试,通过倾角传感器自带的倾角罗盘助手采集角度信息。为了保证在调平时撑腿A和撑腿B其中一条撑腿的伸缩不受另外一条撑腿影响,保证使用时的可靠性,进行了两类实验,I类实验为X轴和Y轴初始角度都是正数,II类实验为X轴和Y轴初始角度有一个为负数,一个为正数。X轴和Y轴角度变化情况如图7和图8所示。
由图7和图8可知,平台可以在5 s之内实现快速调平,调平精度在-0.2至0.2之间,并且调平时撑腿A和撑腿B其中一条撑腿的伸缩不受另外一条撑腿影响,满足调平要求。

图7 I类实验X轴、Y轴角度变化情况
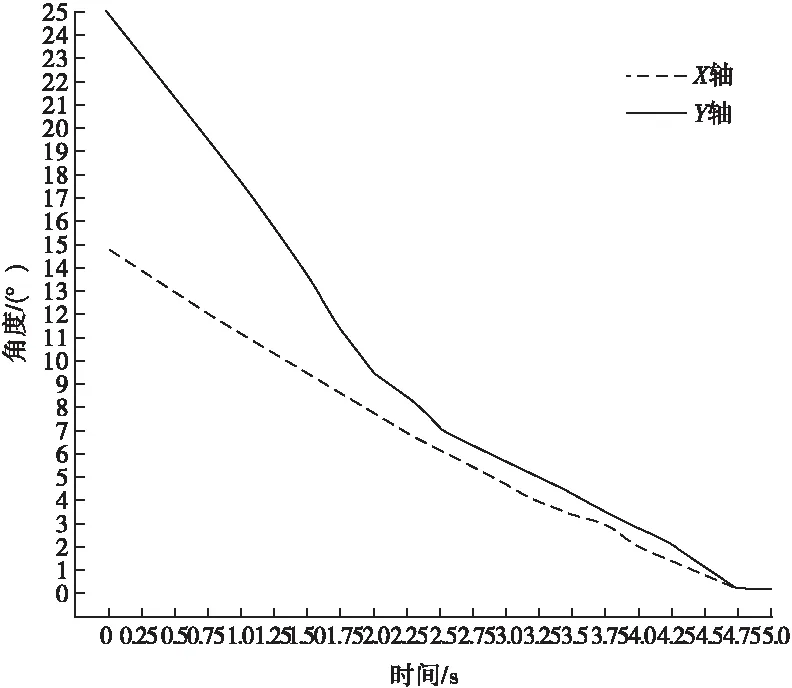
图8 II类实验X轴和Y轴角度变化情况
6 结语
针对车载蜂箱搬运设备底部平台不能保持水平的问题,根据实际需求以STC89C51单片机为主控芯片完成了3点支撑的车载平台的液压调平设计,同时采用了固定一点不动,调节其他两点的调平策略,一条撑腿固定保证平台的稳定性并使用2个液压油缸作为执行器件支撑车载平台,将控制器和比例阀相结合,用电压信号决定比例换向阀开度,由比例换向阀实现撑腿升降调平,可以灵活地控制油缸升降的速度,做到及时启停,水平倾角误差在-0.2度到0.2度以内,并能适应坡度和负载大的环境,灵活性好、精度高。
