变电站环境风机联动系统远程智能控制方法
2022-02-21苏君,吴昊,周琰
苏 君,吴 昊,周 琰
(国网上海市北供电公司,上海 200072)
0 引言
随着电气智能化研究的深入,智能化变电站的建设越来越多,风机联动系统是变电站内必不可少的智能设备之一[1]。但变电站环境下,风机联动系统在实际运行过程中需消耗大量电能[2],导致变电站内电能消耗过高,浪费大量资源。因此根据实际需求控制风机联动系统成为变电站亟需解决的问题之一[3]。刘青等[4]针对风机VSG虚拟惯性进行协同控制研究;陈艳等[5]以Buck电路为核心设计矩阵变换器直接控制风机转矩;高本锋等[6]针对双馈风机,采用自抗扰控制技术抑制其次同步控制系统间的相互作用。
通常情况下,变电站环境风机联动系统的检测信号为强电信号,需通过信号转换后才能被传感器所采集,而以往的信号转换方法在转换信号过程中通常存在一定误差[7],由此,导致变电站环境风机联动系统状态监测结果存在一定偏差,最终影响风险联动系统控制性能。针对此问题,研究变电站环境风机联动系统远程智能控制方法。
1 风机联动系统远程智能控制方法
1.1 远程智能控制体系
变电站环境风机联动系统远程智能控制方法采用PLC控制风机联动系统。风机运行过程中,各类传感器也随之开始运行,采集变电站环境中的瓦斯浓度数据、风机运行温度等信息,各传感器采集不同类别的数据信息。传感器采集的风机联动系统的强电信号在PLC控制下通过交流采样数字模型转换为交流信号,并由模拟信号转换成数字信号,并同预先设定的参数进行对比。随后,数字信号再次通过PLC转换为模拟信号,再转换为所需电压值,通过变频器实现风机联动系统转速控制。图1所示为变电站环境风机联动系统远程智能控制原理结构图。
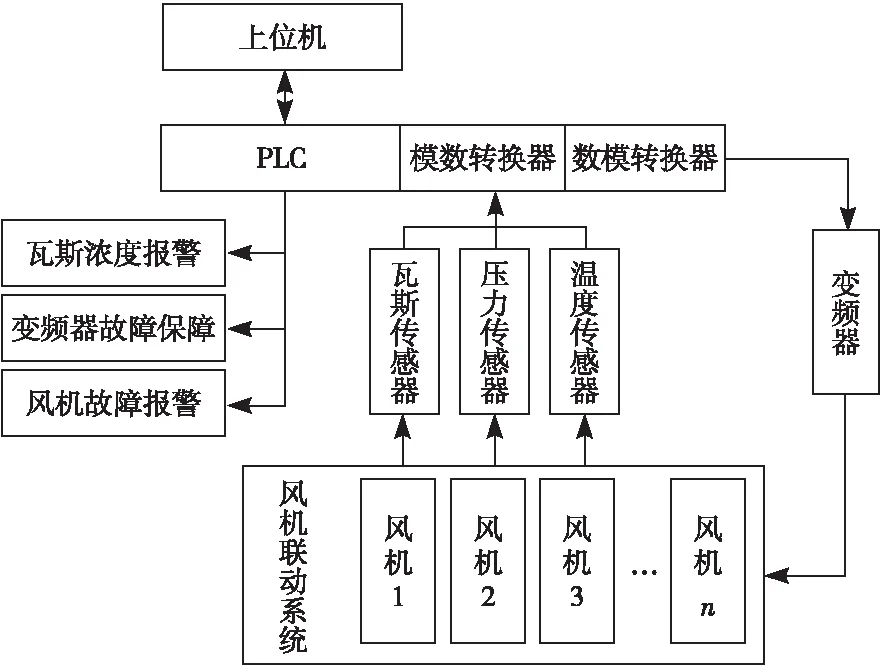
图1 控制方法结构体系
1.2 变电站环境风机联动系统数据采集
风机联动系统数据采集过程中,采用交流采样方法[9],将其处理为离散化处理连续周期信号,分析期间信号,确定所需的信息。通常情况下,离散化处理即N等分单信号周期[10],以1/N的时间间隔采集信号,获取离散时间信号,通过模数转换器获取离散数据,通过相应过程处理离散数据获取电压、电流、有功/无功功率等运行参数。交流采样方法具体过程如下。
根据sin2α+sin2(90°+α)=1,选取每周波90°两点采样模式完成交流采样,公式描述如下:
(1)
式中:I表示电流值;ωt和θ分别表示角速度与时间的乘积和一常数。
针对规范的正弦波来说,上述描述是完全正确的。但变电站环境风机联动系统实际运行过程中,存在的谐波将对信号产生误差[11],因此若在单周波内进行四点采样,各相隔90°,仅可获取基波。若单周期内进行20点采样,各相隔18°,即会产生1点和6点、2点和7点等10个相差90°的采样对,由此近似定义:
(2)
基于式(2)能够得到:
(3)
由此得到:
(4)
通过上述分析,只要获取到不同周波采样次数为4的倍数,那么所获取的均方根值即为核电气量的有效值。为防止偶然误差形成,连续踩三个周波,共60点,确定电流与电压的数学模型:
(5)
针对该数学模型提出以下要求:
(1)以消除高次谐波为目的,在速度允许范围内,需确保各周波采样点足够多,通常情况下单周波采样30点即可消除7次及以下的谐波;
(2)单周波采样点数需确保为4的倍数,避免产生误差;
(3)采用软件滤波法抑制偶然误差,令当前周期采样结果同前周期采样结果完成平滑滤波;
(4)设定采样间隔为1 ms,但周波采样30点的方式仅在50周正弦波中适用,在变电站环境风机联动系统周波出现波动的条件下有一定概率产生误差,该误差值受第一点采样的初相影响。
在周波为49.5 Hz的条件下,当踩点为20时间产生1°左右的误差。在最后1点采样为90°条件下可基本消除误差。在最终点采用处于过零状态的条件下,误差值达到上限。假如Im值为1 A,则标准值为I=0.718 2 A。在周波为49.5 Hz条件下,第一点初相为19°,依照规范正弦波场方根能够获取:
(6)
由此,得到相对误差。
通常情况下,变电站环境风机联动系统不允许周波低于49.5 Hz,因此可忽略周波的影响误差。但以提升数据采集精度为目的,需采用过零检测[13],经由两次正过零的时间差能够确定波长,以此确定不同点的采样间隔。交流采样方法在计算功率时的具体过程如下:
当前普遍采用仅需两相CT的两表法确定电度表与瓦特表,基于向量图表示得到:
P=PA+PC
=UABIAcos(30°+φ)+UCBICCcos(30°-φ)
(7)
式中:P表示有功功率;PA和PC分别表示A相与C相的有功功率;φ表示角度。在三相功率平衡条件下:
P=UI[cos(30°+φ)+cos(30°+φ)]
=2UIcos30°cosφ
(8)
在交流采样方法中,不同点的向量机可通过瞬时积描述,其有功功率公式描述如下:
(9)
式中:uab和ucb分别表示a,b相电压和c,b相电压;ia和ic分别表示a相电流和c相电流;这4个数值均为同期采样瞬时值。
采用两表法检测无功功率的本质为采用有功功率测量方法检测两相电流同其正交线电压的过程。基于向量图表示,得到:
Q′=UBCIAcos(90°-φ)+UABICcos(90°-φ)
(10)
在三相功率平衡的条件下:
(11)
无功功率计算过程中也可以利用向量机取代各点的瞬时积[14],无功功率计算公式如下:
(12)

1.3 变电站环境风机联动系统远程控制
基于上述过程确定风机联动系统当前运行参数后,同预先设定的参数进行对比,根据实际应用需求,确定目标当前运行所需的运行参数,在上位机端输入控制命令,通过Socket网络完成上位机端与PLC端的控制命令传输。
PLC与变频器之间通过Socket网络进行通信[15],基于上位机的Web远程登录设置变频器命令参数,实现上位机与PLC之间的控制命令传输。
图2所示为通信流程。Socket通信网络不仅能够实现数据流Socket,还能够完成数据报Socket。通常情况下,PLC均面向事务处理与控制,通过对应的请求与应答完成上位机与PLC与上位机之间的相互作用[16]。面向连接PLC处理的请求通常较为繁复,通过一对请求应答无法有效解决,需要数次往来。由于上位机浏览器需同PLC之间进行数次数据交互,所以数据通信过程中选取面向连接的数据流Socket。上位机与PLC间具有不对等的关系。套接口工作流程是PLC先启动,调用Socket()构建一个套接字,若连接完成,PLC与上位机间即可利用read()函数发送数据,并利用write()函数接收数据。

图2 通信流程
1.4 变电站环境风机联动系统变频控制
PLC在接收到上位机传输的控制命令后,通过变频器完成变电站环境风机联动系统远程智能控制。
利用式(13)能够描述风机内电机的转速n、电源频率f、转差率S和电机极对数D:
(13)
由此能够确定,n同f之间具有正比例相关性,也就是通过调节f能够改变n。根据此结果,制作变频器,将其作为变频电源远程控制变电站环境风机联动系统内风机的转速依据。利用变频器进行远程控制时,不会产生励磁滑差损耗与挡板、阀门节流功率损耗,也不会产生转差损耗,所以在控制过程中具有较好的节能效果。利用变频器控制风机转速过程中可控范围较大,令风机频率转速控制在0%~100%范围内[17],实现无极调速。通过变频调速控制风机联动系统可实现集中调控,提升控制过程的灵活性与自动化水平。
2 实例测试分析
实验为验证该文所研究的变电站环境风机联动系统远程智能控制方法在实际风机联动系统远程控制中的应用效果,以某市变电站风机联动系统为测试对象,其中包含4台风机,分别命名为1号风机、2号风机、3号风机和4号风机。采用该文方法对其中的1号风机和2号风机进行远程智能控制测试,设定变频器调速范围在0%~100%之间。4台风机均正常稳定运行。测试所得结果如下。
2.1 数据采集测试
采用该文方法采集测试对象运行数据,并与其实际运行数据进行对比,所得结果如图3所示。
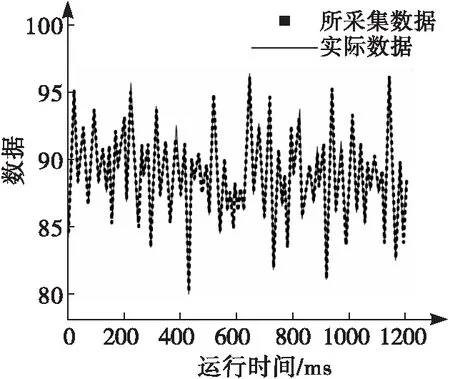
图3 数据采集结果
分析图3得到,采用该文方法所采集的测试对象运行数据与测试对象实际运行数据基本一致,由此说明利用该文方法能够准确采集测试对象运行数据,由此提升测试对象控制精度。
2.2 数据传输测试
在测试对象运行数据采集完成后,从数据传输过程中的链路占有率与冲突率和链路实时性两方面采用该文方法进行数据传输测试。
2.2.1 通信链路占有率与冲突率测试
在多个目标同时控制的条件下,数据传输过程有较大概率产生链路冲突问题。通信链路的占有率S与d冲突率能够描述通信性能,两者的计算公式如下:
(14)
(15)
式中:n和m分别表示所有路由数量和通信路由节点;Li和Cj分别表示当前空闲的节点与参与通信的第j个节点;p(t)表示信息传输效率。占有率同数据传输质量间具有正比例相关性,冲突率同数据传输之间具有反比例相关性。
利用白噪声模拟信息传输过程中的电磁干扰,确定1号风机与2号风机控制过程中数据传输链路的占有率与冲突率,所得结果如图4所示。同时为进一步验证该文方法的性能优势,以文献[4]基于STATCOM/BESS强化风机VSG虚拟惯性的方法和文献[5]基于Buck电路的方法为对比方法,确定对比方法风机控制过程中数据传输链路的占有率与冲突率,所得结果如图4所示。
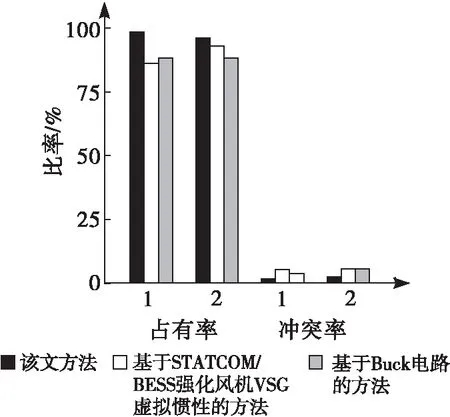
图4 数据传输过程中的占有率与冲突率
分析图4得到,利用该文方法进行数据传输过程中,链路占有率均在95%以上,与两种对比方法控制下数据传输过程中链路占有率相比均较高;在冲突率方法,该文方法控制下,链路冲突率均低于3%,低于两种对比方法的链路冲突率。由此说明该文方法具有较好的数据传输质量。
2.2.2 通信链路实时性测试
通信的实时性是数据传输非常重要的评价值指标,以测试该文方法控制下测试对象数据传输的实时性为目的,对比该文方法与两种对比方法下通信链路堵塞次数同信号延迟时间之间的相关性,所得结果如图5所示。
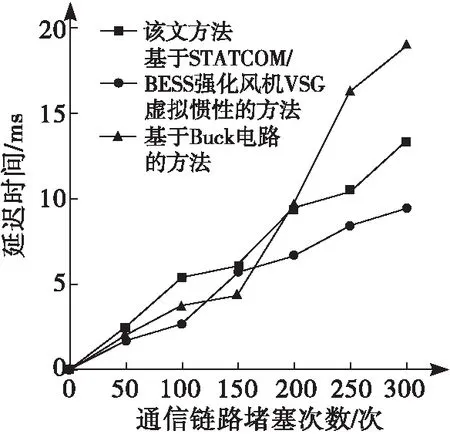
图5 信号实时性测试结果
分析图5得到,在网络环境一致的条件下,随着通信链路堵塞次数的提升,不同方法信号延迟时间均呈逐渐上升趋势。但在通信链路堵塞次数一致的条件下,该文方法的信号延迟时间均低于两种对比方法,由此说明该文方法与两种对比方法相比具有较为显著的实时性优势。
2.3 控制效果
测试对象运行数据统计结果显示,测试对象每年运行时间约为7350小时左右,采用该文方法对测试对象进行控制后,测试对象运行及节能情况如表1所示。
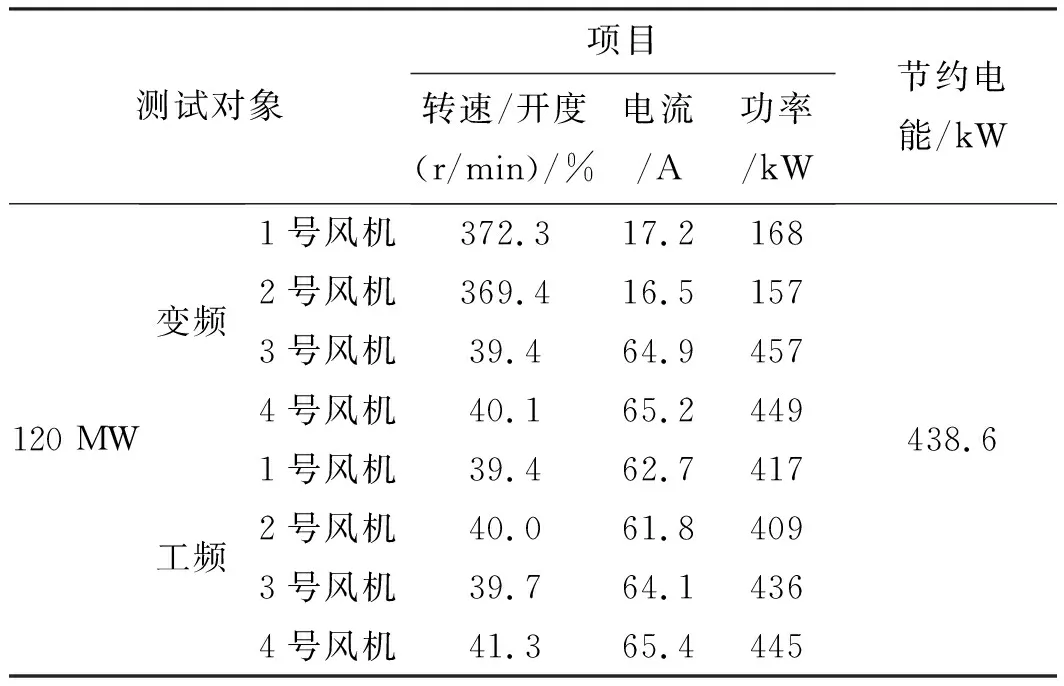
表1 测试对象运行及节能情况
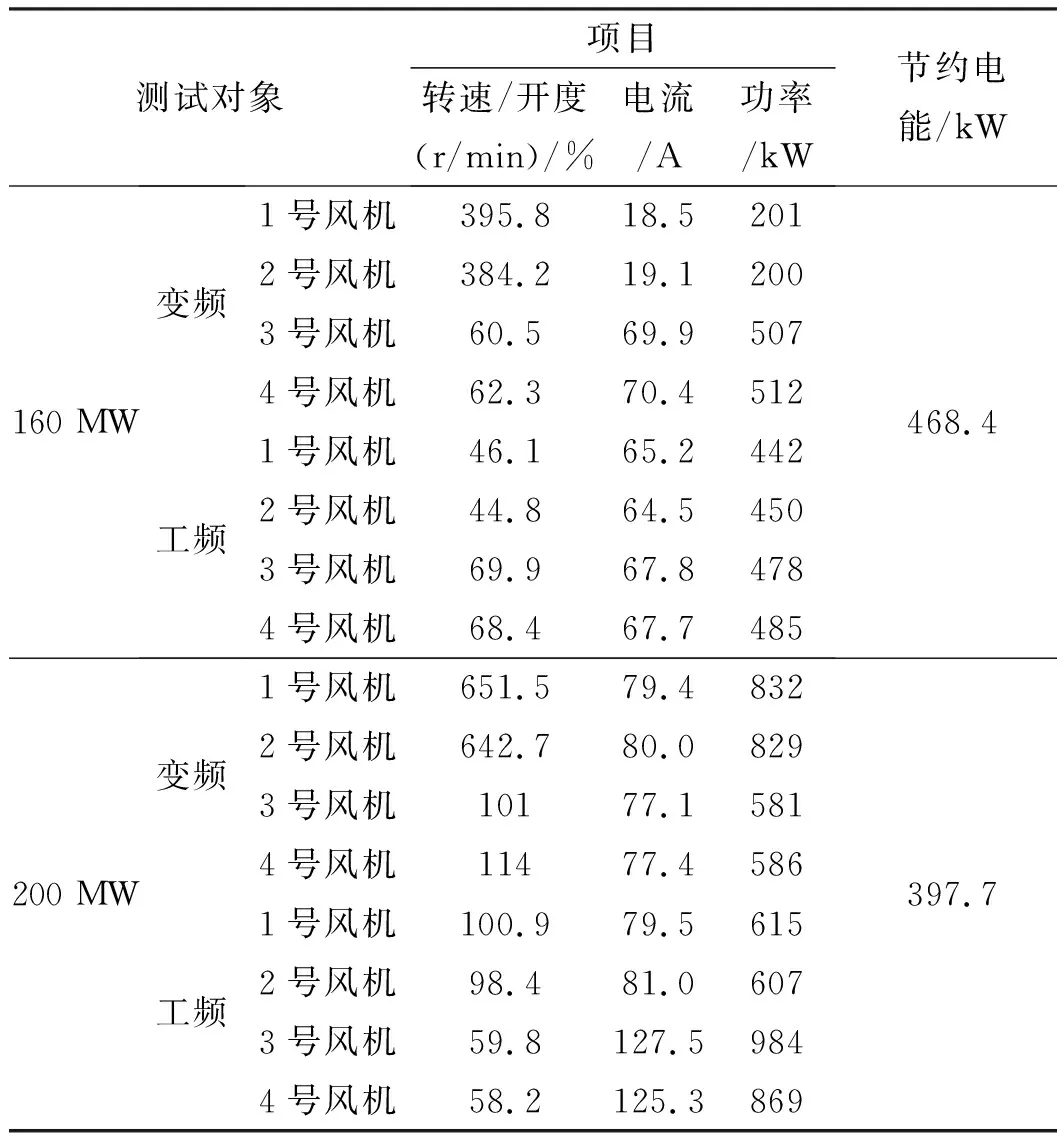
续表1
测试对象实际运行过程中,每年约有50%的时间带20 MW负荷,而带160 MW负荷和200 MW负荷的时间分别约为30%和20%。由此通过表1内的数据能够得采用该文方法控制测试对象条件下,其全年节点量为:7350×(438.6×50%+468.4×30%+397.7×20%)=322.93 kW·h。根据国家电网定价0.27/kW·h能够得到采用该文方法控制条件下测试对象年节约电费为87.19万元。
3 结论
针对以往使用的风机联动系统控制方法消耗大量能源的问题,该文从数据采集、数据传输以及控制方式等三方面出发研究一种新的变电站环境风机联动系统远程智能控制方法,可高精度采集数据,有效传输数据,并实现节能的目的。
