倾斜对置圆盘有机肥侧抛射流形态与控制研究
2022-02-21刘宏新杜春利尹林伟张光甫
刘宏新 杜春利 尹林伟 张光甫
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
目前,由于结构简单、技术成熟,国内外研制的有机肥抛撒机,大多数为后抛式,抛撒装置均布置在机器后部。与后抛式相比,侧抛式设计制造难度较大,对供料有特殊要求,但侧抛作业可控性强、适应广泛、一次作业覆盖面大,既可以实现不进田情况下对小块地和果林等特殊环境施肥,同时又可实现后抛式抛撒机能完成的所有工况,作业效率高、一机多用,优势明显。在装备产品方面,国外John Deere公司研发了MS2320侧抛式抛撒机,使用带有方齿的桨叶作为主要抛射部件,可抛射商品有机肥与农家肥,在抛射过程中用方齿将肥料撕碎以矩形的射流抛射至田间,但是方齿在撕碎肥料的过程中受到的冲击力较大,易损坏。KUHN公司研发了ProTiwn 8100型侧抛式抛撒机,使用锤片将农家肥击碎并以矩形的射流抛射至田间,但冲击性的作业形式导致其可靠性低、故障率高,且锤片难以有效地将松散的商品有机肥抛射至田间。BERNIK等[1]提出了一种使用大直径转子作为主要抛射机构的侧抛式抛撒机,可将商品有机肥或农家肥以矩形的射流抛射至田间,抛射距离远,但是抛射效率不高,行走速度低。国内山东天盛公司研发的侧抛式抛撒机使用带有叶片的辊轮作为主要抛射部件,利用高速旋转的辊轮将肥料抛射出去,实现了条带施肥,但其撒肥效率较低,无法抛射农家肥。在科学研究方面,BERNIK 等[2]提出了基于数学模型的抛撒机的概念设计,并基于离心抛射原理的数学模型确定了抛撒机的最佳匹配参数。LANDRY等[3]将机器与有机肥之间的相互作用通过离散元法(Discrete element method, DEM)在计算机中进行了模拟,并通过试验验证了模拟与实际的一致性,为有机肥抛射的研究提供了一种行之有效的研究方式。在分析肥料抛射过程方面,CHEN等[4]提出了应用图像处理技术对肥料抛射进行分析的方法,COOL等[5]提出了应用立体影像技术对肥料抛射进行分析的方法。国内,吕金庆等[6]对锥形撒肥圆盘中的肥料颗粒进行了运动分析,并通过试验获得了满足作业要求的参数组合,为锥盘式撒肥机的设计提供了理论参考,杨立伟等[7]进行了离心圆盘式抛撒机撒肥均匀性试验,获得了可使肥料分布变异系数最小的参数组合。
侧抛式抛撒装置将肥料沿机具前进方向侧向抛出,抛射流窄而远,抛射流横向叠加形成撒布面,作业幅宽与抛距相关,撒布均匀性取决于抛射流的横向均匀度。所以研究射流的形态与控制方法,使其向理想形态靠近,可更有效地进行机构创新与优化。作者前期设计的倾斜对置圆盘侧抛式抛撒装置,通过试验初步验证了创新结构可行性,能够实现有机肥的侧向抛撒作业[8]。创新机构在抛射均匀性与抛射距离等方面的潜力有待进一步挖掘。为此,本文定性定量地表述抛撒装置的射流形态,并通过创新部件与优化结构参数控制射流,以期提升该装置的性能。
1 射流形态与参数
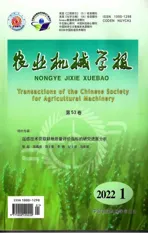
射流是肥料在抛射过程中形成的一种相对稳定的形态。由于整机工作过程中所形成的肥料覆盖面是由行进过程中每一个位置的射流落地后叠加而成,所以在对其进行分析时,以定点射流对其描述,如图1a、1b所示,并用参数表述射流形态,如图1c、1d所示,其中v0为肥料脱离抛撒装置时的速度;δz为抛离区域夹角;δmax为最大抛离角;δmin为最小抛离角;β为散射角;Ls为上底边宽;Lx为下底边宽;Lpj为有效抛距。

图1 射流形态Fig.1 Shooting flow shapes
2 射流形成力学与运动学分析
2.1 入料过程
倾斜对置圆盘有机肥抛撒装置结构如图2a所示,主要由导料板、上挡板、圆盘安装架、减速器、矩形刮肥板、撒肥圆盘组成,其中撒肥圆盘直径为500 mm,矩形刮肥板同相位对置安装[8]。工作时动力通过传动系统传递到减速器中,减速器驱动圆盘旋转。肥料被耙链运送到落料口,在导料板的作用下落到抛撒装置中。为避免肥料被矩形刮肥板回带,肥料应落在撒肥圆盘的第Ⅲ、Ⅳ象限内,而当落在第Ⅲ象限远离圆盘中心位置时,肥料未经抛射直接落地,或有过大的抛离角,故肥料应落在如图2b所示的阴影区域。

图2 装置结构与入料过程示意图Fig.2 Schematics of device structure and feeding process1.导料板 2.耙链 3.上挡板 4.圆盘安装架 5.减速器 6.入料流 7.矩形刮肥板 8.撒肥圆盘
2.2 肥料在圆盘上的运动与受力分析
以圆盘中心为原点o建立空间直角坐标系,如图3所示。其中x轴方向指向肥料抛射口,y轴方向与机组运动方向相反,z轴方向垂直于地面向上,R为肥料颗粒与撒肥圆盘中心的距离,m;α为圆盘倾角,(°);γ为矩形刮肥板与竖直方向的夹角,(°);vl为肥料颗粒落在撒肥圆盘上时的速度,m/s;ω为圆盘角速度,rad/s;vlε为vl在垂直撒肥圆盘方向上的分解速度,m/s;vlτ为vl在平行撒肥圆盘方向上的分解速度,m/s。由于肥料较为松软,自由下落距离较短且连续落料,落在撒肥圆盘上的速度vl较小,故假设肥料落到撒肥圆盘上,不会弹起并且跟随矩形刮肥板运动。将肥料颗粒落到矩形刮肥板上的初始速度分解为vlτ和vlε,而vlτ又分解为vlτε和vlττ,其中vlε在撒肥圆盘作用下变为零,vlτε在矩形刮肥板作用下变为零的同时矩形刮肥板带动肥料颗粒给予肥料颗粒速度vg,肥料颗粒此时具备vlττ与vg两个分速度。
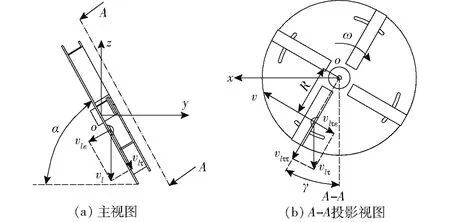
图3 肥料颗粒入料速度分析Fig.3 Analysis of feeding speed of fertilizer particles
矩形刮肥板带动肥料颗粒的速度为
vg=ωR
(1)
vlτ在平行矩形刮肥板方向上的分解速度为
vlττ=vlsinαcosγ
(2)
肥料颗粒落到刮肥板上的初速度为
vc=vg+vlττ
(3)
G垂直于和平行于撒肥圆盘的分力为
(4)
式中G——肥料颗粒受到的重力,N
Gτ垂直于刮肥板的分力为
Gτε=Gsinαsinγ
(5)
Gτ平行于刮肥板的分力为
Gττ=Gsinαcosγ
(6)
上述力的方向如图4所示。

图4 肥料颗粒重力分析Fig.4 Gravity analysis charts of fertilizer particles
肥料颗粒所受的离心力为
Fl=mω2R
(7)
式中m——肥料颗粒质量
由式(4)可知撒肥圆盘对肥料颗粒的支持力为
FNy=Gε=Gcosα
(8)
由式(5)可知矩形刮肥板对肥料颗粒的支持力为
FNg=Gτε=Gsinαsinγ
(9)
肥料颗粒所受的科里奥利力为
Fco=2mω2R
(10)
撒肥圆盘对肥料颗粒的摩擦力为
Ffy=μfFNy
(11)
式中μf——肥料颗粒与钢面之间的摩擦因数
矩形刮肥板对肥料颗粒的摩擦力为
Ffg=μf(Fco+FNg)
(12)
肥料颗粒受到合力为
F=Fl+Fco+G+FNy+FNg+Ffy+Ffg
(13)
上述力的方向如图5所示。
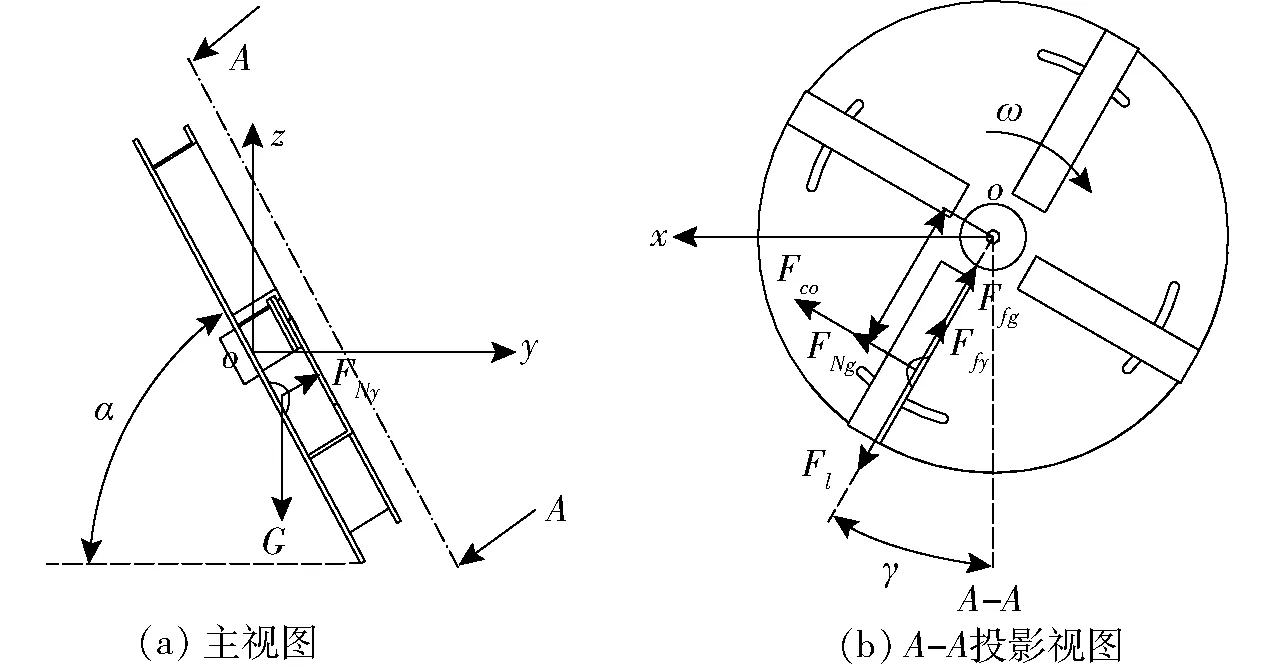
图5 肥料颗粒受力分析Fig.5 Force analysis of fertilizer particles
肥料颗粒加速度为
a=F/m
(14)
因此肥料颗粒在加速度作用下所获得的速度为
(15)
此后肥料颗粒将以初速度vc与加速度a的运动规律运动并逐渐形成如图6所示的A、B、C3个区域肥料。
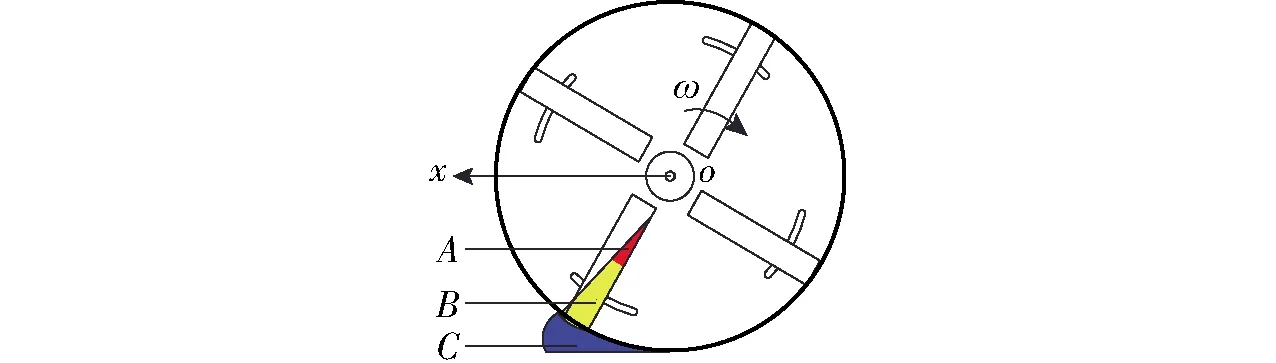
图6 肥料分区Fig.6 Fertilizer zoning
2.3 肥料脱离圆盘时的运动分析
为分析肥料脱离圆盘时的受力与运动,需分别对3个区域内肥料的速度进行分析,A区肥料为一直遵循上述运动规律而未堆积到矩形刮肥板末端的肥料,由式(3)可知该部分肥料在脱离抛撒装置时的速度为
v0=vj+vc+vs=vj+vg+vlττ+vs
(16)
式中vs——撒肥车前进时给予肥料的速度
B区肥料为已经堆积在矩形刮肥板末端且一直跟随着矩形刮肥板运动的肥料,该区域肥料运动到抛射口时也开始具备沿矩形刮肥板方向的速度及加速度,并遵循上述运动规律,由于A、B两区域内肥料均受到矩形刮肥板的控制,故称这两区域内肥料为受控肥料,且B区肥料已经被堆积在矩形刮肥板末端,速度vlττ在C区肥料的作用下变为零。
C区肥料为堆积在矩形刮肥板末端且脱离矩形刮肥板控制的肥料,该区域内肥料会堆积在料腔底部并在肥料的相互作用力下抛射出去。当底部被肥料堆满,2个矩形刮肥板中间会堆积一部分肥料并在肥料的相互作用力下抛射出去,由于C区肥料脱离矩形刮肥板的控制,故将其称为非受控肥料。如图7所示,v01为受控肥料抛离速度、v02为非受控肥料抛离速度。肥料在脱离抛撒装置时所具备的速度可以沿x、y、z方向分解为v0x、v0y、v0z。倾斜对置圆盘的倾角给予肥料较大的横向分速度v0y,形成了散射角β,同时由于上述分析中非受控肥料以较低抛离速度抛射形成根部肥料聚集的现象。

图7 肥料颗粒初始抛射速度分析Fig.7 Analysis of initial throwing velocity of fertilizer particles1.受控肥料 2.非受控肥料
2.4 肥料脱离圆盘后的受力与运动分析
由于肥料颗粒在空气中运动的速度较大,所以在对其进行分析时应考虑空气阻力影响,现引入空气阻力公式
(17)
式中f——肥料颗粒所受的空气阻力
k——空气阻力系数
肥料颗粒在空气中运动时各方向上的加速度为
(18)
式中afx——肥料颗粒在x方向上的空气阻力加速度,m/s2
afy——肥料颗粒在y方向上的空气阻力加速度,m/s2
afz——肥料颗粒在z方向上的空气阻力加速度,m/s2
肥料颗粒的受力与运动如图8所示,以颗粒抛出点在地面上的投影点为原点O建立空间直角坐标系,其中X轴方向指向肥料抛射方向,Y轴方向与机组运动方向相反,Z轴方向垂直于地面向上。
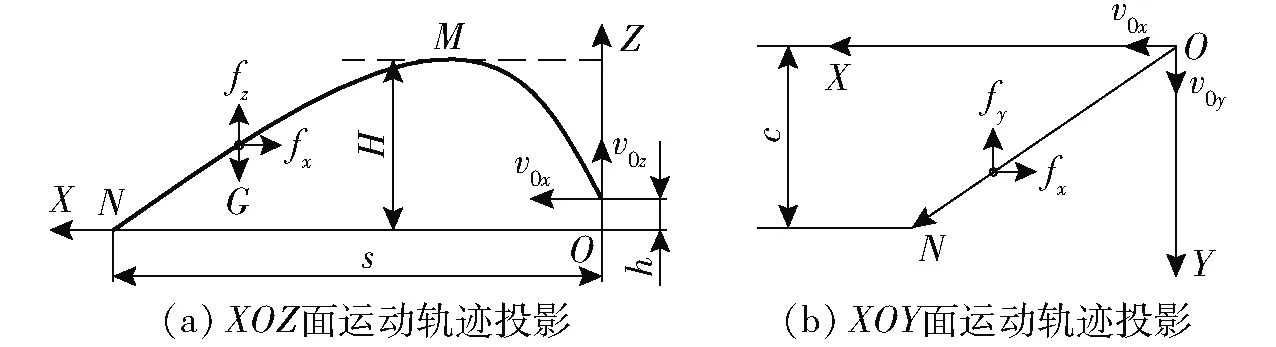
图8 肥料颗粒在空中抛射运动分析Fig.8 Motion analysis of fertilizer particles in air
图中:点M为抛射最高点;点N为落地点;H为圆盘将肥料颗粒抛射的最大高度,m;h为装置离地高度,m;s为抛射距离,m;c为上底边宽的一半,m;fx为肥料颗粒沿X方向受到的空气阻力,N;fy为肥料颗粒沿Y方向受到的空气阻力,N;fz为肥料颗粒沿Z方向受到的空气阻力,N。
由此可得肥料颗粒在空中抛射的方程组,从而得到抛射距离s与上底边宽的一半c,公式为
(19)
式中t1——肥料颗粒上升到最高点所用的时间,s
t2——肥料颗粒由最高点落地所用的时间,s
tz——肥料颗粒在空中抛射的总时间,s
由式(19)可推得表述射流形态的参数
Ls=2c
(20)
Lpj=s
(21)
δ=arctan(v0z/v0x)
(22)
δz=δmax-δmin
(23)
β=2arctan(v0y/v0x)
(24)
因而由式(18)、(20)~(24)可得v0x、v0y和v0z是决定射流形态的直接因素,由式(16)可得v0主要是由vs、vj、vg、vlττ决定的,其中vs受行走速度影响,vj、vg、vlττ受圆盘转速、圆盘倾角、肥料抛离时刮肥板所处位置等因素影响,而由式(13)~(15)可以发现改变刮肥板的形状与安装角度可以改变肥料颗粒在刮肥板上的受力情况,进而通过变化的加速度改变其速度vj,由此可知刮肥板的形状与安装角度也是控制射流形态的关键因素。
3 EDEM仿真环境建立与分析
3.1 仿真模型建立
(1)仿真参数设置
应用EDEM离散元仿真分析软件模拟有机肥抛撒装置的工作过程,结合上述理论分析射流形成的过程。根据肥料特点,使用Hertz-Mindlin with JKR模型[9],该模型适用于药粉等粉体颗粒和农作物、有机肥料、泥土等含湿物料,根据试验使用的商品有机肥颗粒的实际测量参数,综合考虑设置离散元仿真参数[10-11]如表1所示。
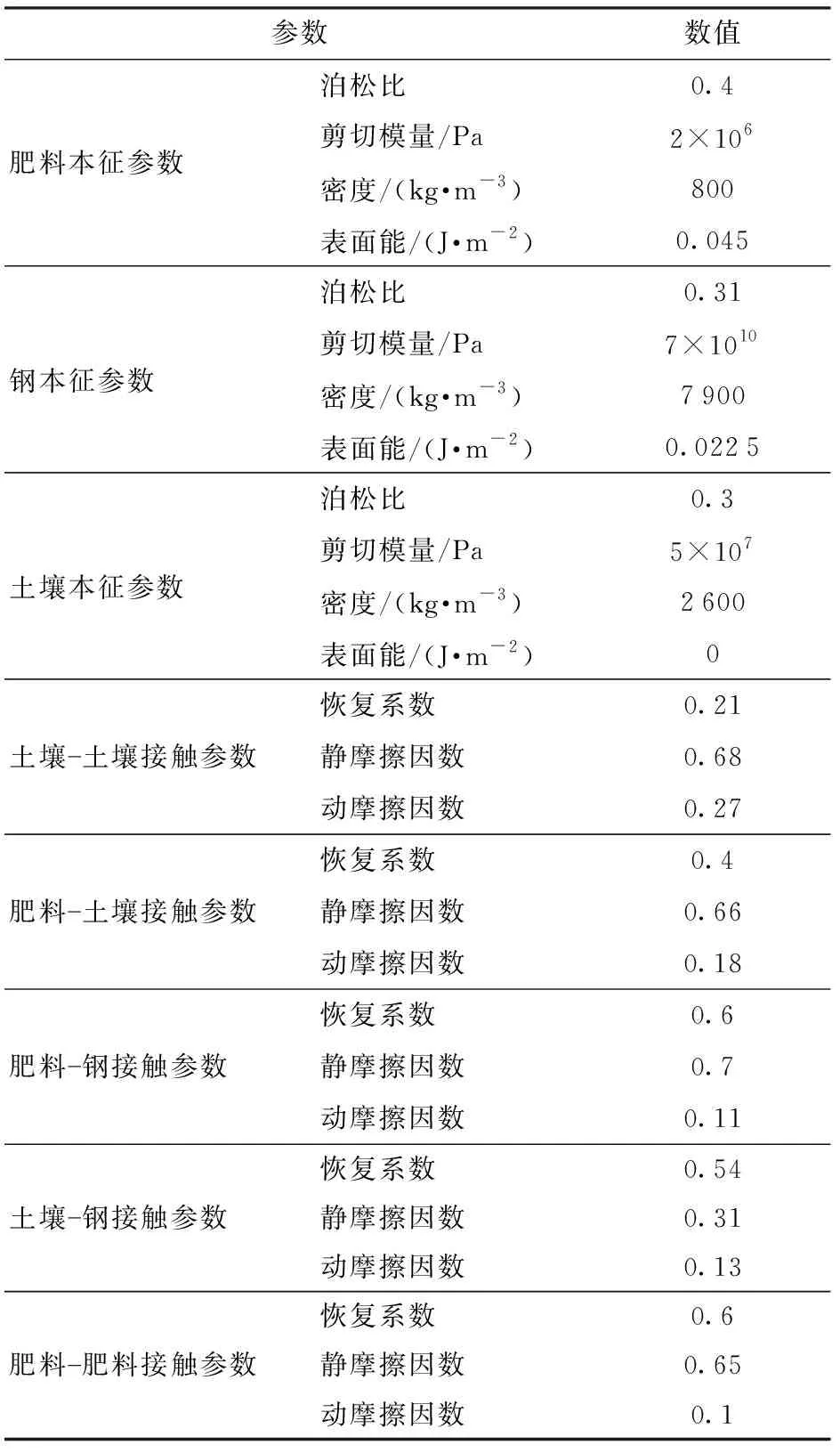
表1 离散元仿真参数Tab.1 Discrete element simulation parameters
(2)颗粒模型建立
在仿真模型中,将颗粒简化为圆球模型,创建球形肥料颗粒体,参照土壤粒径设置肥料颗粒体半径为3 mm[12-13],材料选取肥料本征参数,并自动获取其余属性,颗粒类型选择随机分布。鉴于JKR模型的自身具有粘结团聚特点,生成颗粒与颗粒间会粘结成多种形态,其中最主要的粘结形态为点状、线状与团状,如图9所示。

图9 颗粒模型Fig.9 Particle models
(3)三维模型导入
在CATIA软件中创建三维模型,简化模型并将其转换成stp格式导入到 EDEM 软件中,将圆盘、辊子设置成转动件,设置其转动速度、转动开始和结束时间,设置装置整体机组的行进速度。
(4)颗粒工厂设置
由于载料箱容纳肥料较多,若将其全部填满计算量过大。选择在载料箱卸料口上方建立颗粒工厂,设置生成颗粒速率每秒200 000颗粒(20 kg/s),颗粒半径服从正态分布。
(5)其他参数设定
在仿真过程中,设置固定时间步长为Reyleigh(瑞利)时间步长的20%,数据保存间隔为0.02 s,网格为最小颗粒尺寸的2倍[14-15]。
将模型导入EDEM中,为防止颗粒落地后继续滚动,在地面模型上建立50 mm高的虚拟地面,仿真环境如图10所示。

图10 仿真环境Fig.10 Simulation environment
3.2 射流形态分析
据上述分析可将抛射装置内部的物料分为受控肥料与非受控肥料,因这两区域物料的运动规律不一致,将形成不同的射流,因此在装置内部选中如图11所示的黑色颗粒,分别为受控物料和非受控肥料。
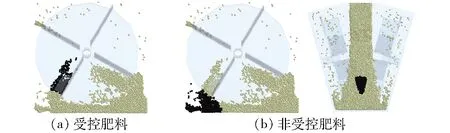
图11 肥料分区Fig.11 Fertilizer zoning
非受控肥料通过肥料相互之间的作用力抛射,越靠近矩形刮肥板抛射速度越大,但是由于非受控肥料较多,大部分肥料无法受到高速肥料的作用力,抛离速度低被抛射到近处,形成近处物料堆积的现象,如图12所示。

图12 非受控肥料射流Fig.12 Uncontrolled shooting flow of fertilizer
受控肥料的抛离角度为其脱离矩形刮肥板时矩形刮肥板末端的抛离角度,该部分肥料抛离速度与矩形刮肥板末端的线速度一致,所以该部分肥料可以较为均匀地被抛射到远处,如图13所示。

图13 受控肥料射流Fig.13 Controlled shooting flow of fertilizer
来自不同部分的射流组合得到整体的抛射效果,其中非受控肥料抛射距离较近,同时受控肥料虽然能被抛射到远处,但其较大的横向分速度导致较大的散射角,仿真试验结果如图14所示。

图14 定点抛射仿真结果Fig.14 Simulation results of fixed point ejection
4 控制部件设计与抛射分析
4.1 抛离角控制
设计如图15所示的抛离角控制挡板,并进行EDEM仿真试验,通过调节抛离角控制挡板的高度hd,可以控制肥料的抛离位置,起到调节最小抛离角δmin的作用,同时,此挡板还可以封堵底部肥料的出口,使肥料在底部凝聚成腔,起到控制底部非受控肥料的作用。

图15 抛离角控制效果Fig.15 Control effect of throw-off angle
将抛离角控制挡板高度hd分别设置为120、127.5、135、142.5、150 mm并进行仿真试验,测量最小抛离角δmin。如图16所示,δmin随着hd的增大而增大。

图16 抛离角控制挡板高度与最小抛离角关系曲线Fig.16 Effect of height of throw-off angle control baffle on minimum throw-off angle
4.2 散射角控制
4.2.1圆盘倾角对散射角的控制
散射角的形成主要是由于v0y较大,而影响v0y大小的主要因素为圆盘倾角,将圆盘倾角α分别设置为55°、60°、65°、70°、75°并进行仿真试验,测量散射角β。如图17所示,β随α的增大而减小。

图17 圆盘倾角与散射角关系曲线Fig.17 Influence of disk inclination on scattering angle
但是当圆盘倾角大于75°时将会造成肥料回带,严重影响抛射效果,同时过大的圆盘倾角也会造成落料口狭窄,抛射量降低的问题。
4.2.2宽底外延倾斜四边形刮肥板设计
根据上述理论分析,影响散射角的直接原因是肥料颗粒脱离抛撒装置时的v0y过大,而v0y是由刮肥板的旋转运动带动肥料颗粒产生的,因此为了获得更小的散射角需设计新的刮肥板,使肥料颗粒在脱离抛射装置时的速度v01在y轴方向的分速度小于矩形刮肥板抛射肥料颗粒在y轴方向的分速度,使肥料沿着中线抛射,从而降低散射角。设计如图18b所示的宽底外延倾斜四边形刮肥板。为了降低肥料在y轴方向上的分速度使刮肥板末端的直线平行于地面(如图18a中平行于地面的虚线所示),在此直线与圆盘中心点所确定的平面上设计末端加宽的宽底外延倾斜四边形刮肥板。

图18 宽底外延倾斜四边形刮肥板安装位置Fig.18 Installation position of wide bottom extended inclined quadrilateral fertilizer scraper1.矩形刮肥板 2.宽底外延倾斜四边形刮肥板 3.平行于地面的直线 4.撒肥圆盘
使用EDEM仿真软件对装有宽底外延倾斜四边形刮肥板的抛射装置进行仿真试验,结果如图19所示,在圆盘倾角为75°条件下设计宽底外延倾斜四边形刮肥板,将散射角降低至25°,比使用矩形刮肥板形成的散射角小,控制效果良好。以同样的方式在圆盘倾角为55°的条件下设计一套宽底外延倾斜四边形刮肥板,进行仿真试验得到大部分肥料抛射在35°的散射角内,但是还有部分肥料散射在35°以外,由此可见宽底外延倾斜四边形刮肥板在圆盘倾角为55°的条件下仍对散射角有控制效果,但是此时的抛射距离近、抛射不均匀。

图19 宽底外延倾斜四边形刮肥板抛射仿真结果Fig.19 Simulation results of wide bottom extended inclined quadrilateral fertilizer scraper
4.3 非受控肥料控制及柔性筒腔形成
由于肥料具备粘性与塑性,在抛射的过程中容易凝聚成块,而抛撒装置在加入抛离角控制挡板后底部肥料出口被封堵,低速的脱控肥料被控制在装置内,在矩形刮肥板的旋转运动下形成两个对称的柔性圆腔。但是矩形刮肥板无论是同相位安装还是异相位安装都无法对中间区域的肥料进行控制,且两刮肥板中间还有凸起的导向阻碍,如图20所示。

图20 矩形刮肥板肥料控制示意图Fig.20 Schematics of control of fertilizer by rectangular fertilizer scraper
异相位安装宽底外延倾斜四边形刮肥板可使加宽部分不发生干涉碰撞,刮肥板末端加宽的设计可以有效地控制两对置刮肥板之间的非受控肥料,增大肥料容纳量从而提高施肥效率。随着宽底外延倾斜四边形刮肥板绕轴线旋转,外延部分又可将矩形刮肥板旋转形成的凸起部分刮成圆筒腔,扫清有机肥抛出路径上的导向阻碍,如图21所示,由有机肥形成的柔性筒腔可以容纳大块的硬质杂质,避免大块硬质杂质将刮肥板卡住,防止刮肥板与料腔内部结构发生刚性冲击,保证设备的安全性。
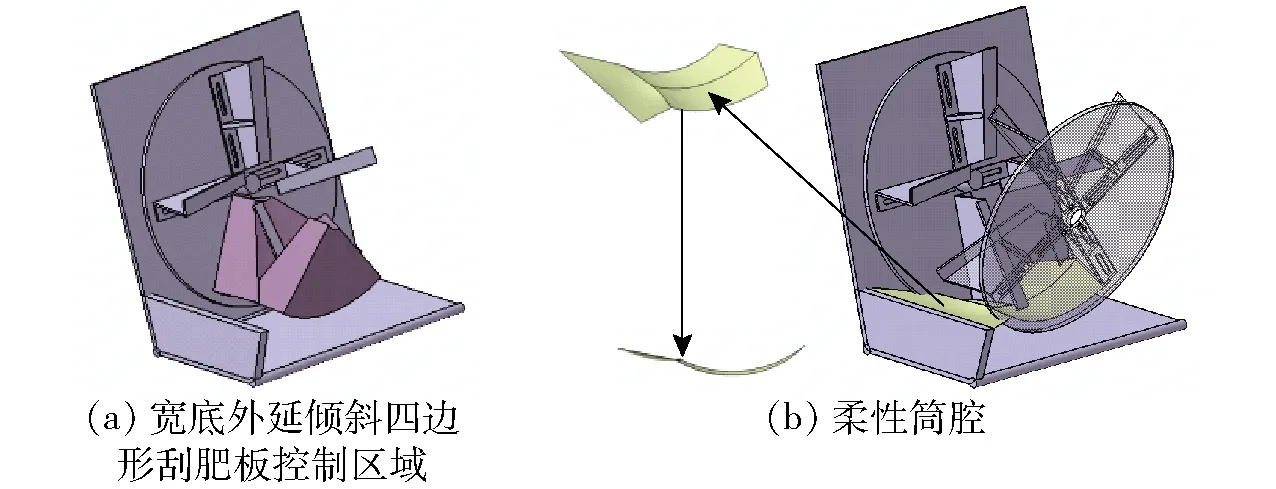
图21 宽底外延倾斜四边形刮肥板肥料控制示意图Fig.21 Schematics of control of fertilizer by wide bottom extended inclined quadrilateral fertilizer scraper
4.4 附属机构
对射流的关键形态参数控制后,几个附属机构也对射流抛射起到辅助作用:辅助抛射辊轮对抛射过程中落至近处的较大肥料块进行二次打散并抛射,对比分析图15与图22可观察到,抛射装置加装辅助抛射辊轮后抛射的物料流中团聚的物料块数量大大降低,打散效果明显;上导流板可对肥料进行导流,将抛离角过大的肥料控制在合理范围内。
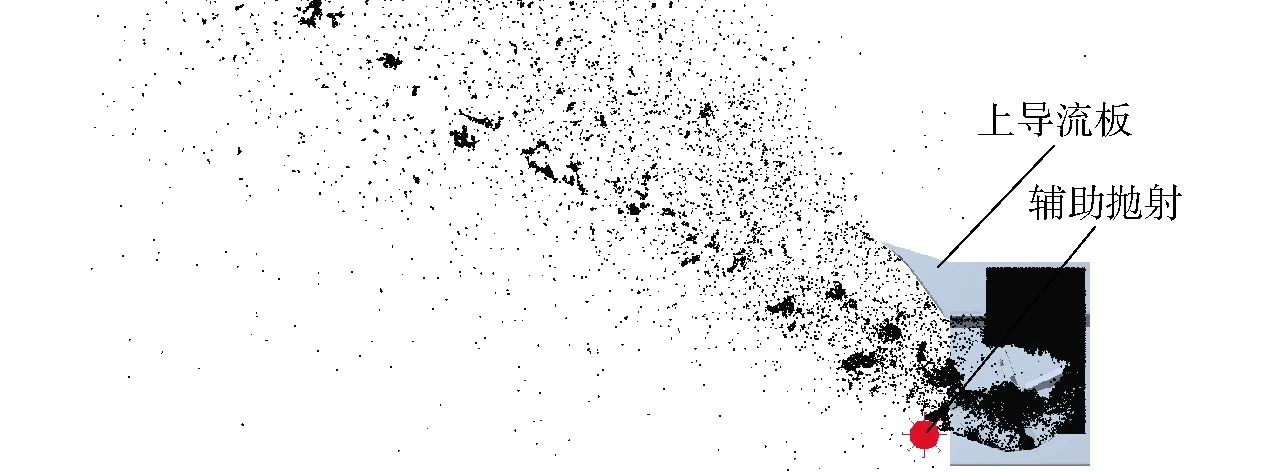
图22 辅助抛射效果Fig.22 Auxiliary throwing effect
对添加附属机构后的有机肥抛撒装置在行进状态下进行EDEM仿真试验,试验结果表明创新设计的控制部件与附属机构对肥料的控制效果良好,在此装置行走抛射时可以形成大抛距射流和连续均匀的覆盖面,试验结果如图23所示。
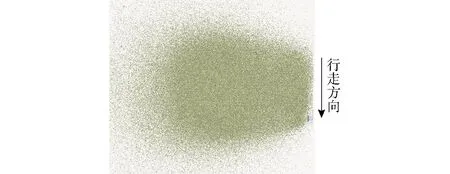
图23 行走抛射效果Fig.23 Run throwing effect
5 样机试验
5.1 试验装置与材料
试验于2020年10月28日进行,试验地点为东北农业大学试验基地,当日气温6℃,晴,西风3级。试验装置总体结构如图24所示,主要包含撒肥圆盘、辅助抛射辊轮、抛离角控制挡板、宽底外延倾斜四边形刮肥板、上导流板。整机工作时,拖拉机动力输出轴通过万向节将动力传递给传动箱,经过传动箱将动力传递给抛射装置,驱动倾斜对置双圆盘与辊轮旋转。
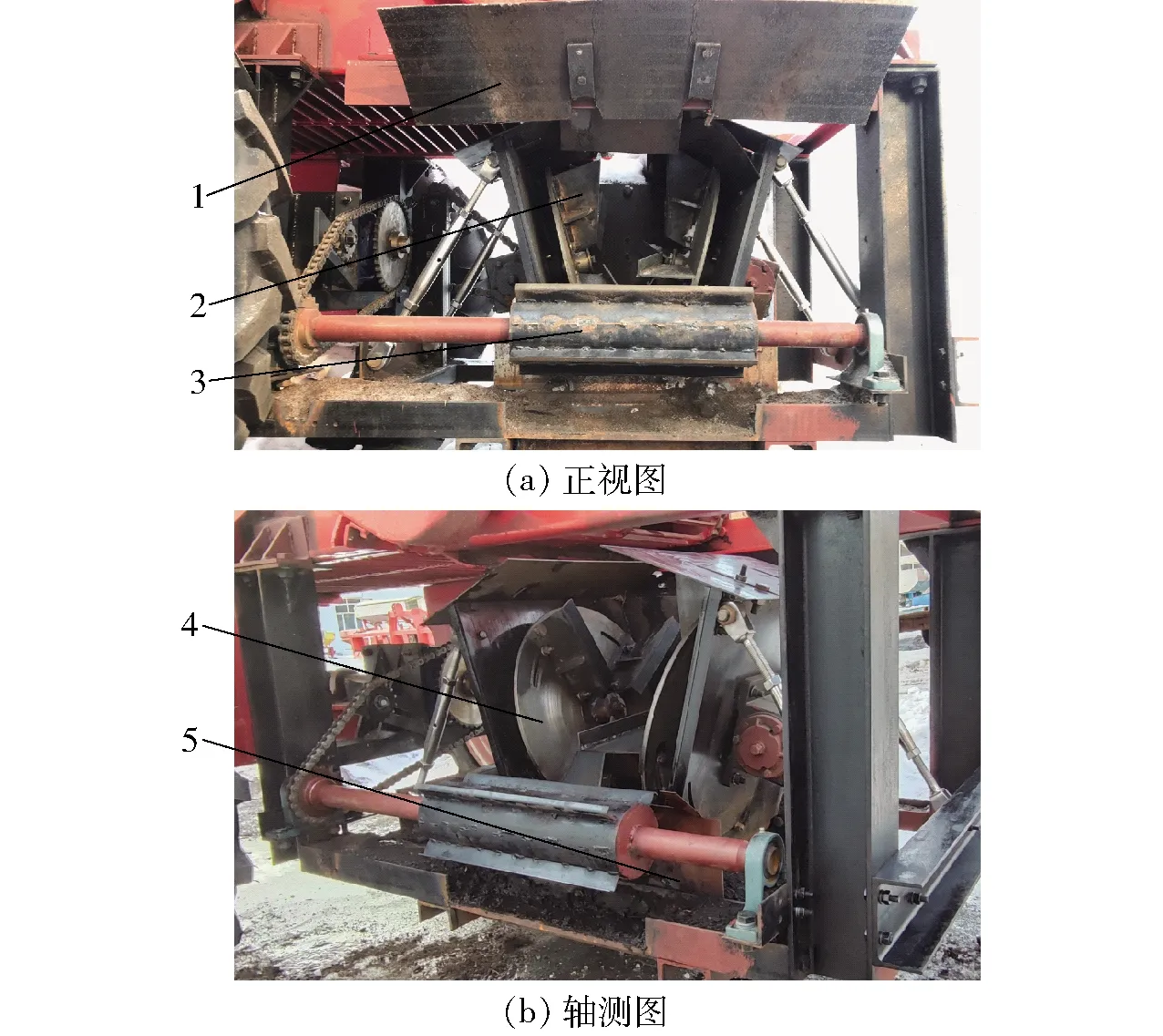
图24 倾斜对置圆盘侧抛试验装置Fig.24 Physical pictures of side throwing experimental device with inclined opposite discs1.上导流板 2.宽底外延倾斜四边形刮肥板 3.辅助抛射辊轮 4.撒肥圆盘 5.抛离角控制挡板
根据有机肥与抛撒机的现行相关标准,结合行业实际操作惯例,选择哈尔滨易利融农业科技有限公司的商品生态有机肥作为试验材料。此有机肥存在自然结块现象,但较松散,整体呈现细粉状、粗颗粒状与大结块并存的形式,有机肥状态如图25所示,其含水率为28.9%、容积密度为644 kg/m3、自然休止角为34°、与钢质面的滑动摩擦角为28°。

图25 有机肥状态Fig.25 Organic fertilizer status
5.2 试验结果分析
5.2.1有效抛距
通过调节底部挡料板高度可以控制最小抛离角,当抛离角约为30°时有更大的有效抛距,抛离角控制挡板高为140 mm,上导流板导出角为40°时,可将射流的抛离角控制在最佳抛离角度30°左右,通过调节圆盘转速可以控制抛射距离,为探索射流能达到的最大有效抛距Lpj,在使用矩形刮肥板的情况下设置圆盘转速为400、500、600、700、800 r/min,测量有效抛距,试验结果如图26所示,有效抛距随圆盘转速增大而增大,当圆盘转速大于700 r/min时有效抛距趋于稳定。

图26 圆盘转速与有效抛距关系曲线Fig.26 Influence of rotating speed of disk on effective throwing distance
5.2.2筒腔形成效果
试验中肥料在宽底外延倾斜四边形刮肥板与抛离角控制挡板的共同作用下形成了如图27所示的柔性筒腔,此筒腔中间无导向阻碍,与刮肥板之间的间隙小且能容纳硬质杂质,与分析中提出的柔性筒腔形态一致,在抛射作业的过程中可以有效地起到导流的作用。

图27 柔性筒腔Fig.27 Flexible tube
5.2.3撒布质量
圆盘倾角会影响散射角,降低散射角可以使射流具有更小的迎风面,从而可以降低空气阻力对射流的阻碍作用,起到提升抛射距离的作用,因此试验中将圆盘倾角设置为最大角度75°。现为获得更大的有效抛距,换用上述分析中的宽底外延倾斜四边形刮肥板进行定点抛射试验,并与矩形刮肥板的抛射效果和仿真抛射效果对比,如图28所示。从图中可以看出宽底外延倾斜四边形刮肥板抛射的射流与矩形刮肥板抛射的射流相比有更小的散射角,形成了窄幅的射流,有效抛距11.6 m,远大于车身宽度,行走抛射覆盖均匀,仿真抛射效果与实际抛射效果吻合度高。

图28 撒布质量对比Fig.28 Comparison of spreading quality
6 结论
(1)采用抛离区域夹角、最大抛离角、最小抛离角、散射角、上底边宽、下底边宽、有效抛距等参数可准确描述倾斜对置圆盘侧抛式抛撒装置的射流形态,为进一步研究抛射机理奠定了基础。
(2)抛离角控制挡板可控制抛撒装置底部的非受控肥料,最小抛离角随抛离角控制挡板高度的增大而增大,最佳抛离角为30°,当抛离角控制挡板高为140 mm、上导流板导出角为40°时,可将射流的抛离角控制在30°左右。有效抛距随圆盘转速增大而增大,当圆盘转速大于700 r/min时有效抛距趋于不变,散射角随圆盘倾角的增大而减小,实用倾角为75°。
(3)设计了宽底外延倾斜四边形刮肥板,可显著降低散射角,底部加宽并外延的设计可以控制两刮肥板中间的非受控肥料,在与抛离角控制挡板的共同作用下可形成内部无导向阻碍的柔性筒腔,抛射效果更好,提升有效抛距至11.6 m,并可形成窄幅的射流。