中国空间站建设系统方案特点与展望
2022-02-20王翔张峤王为
王翔 张峤 王为
(北京空间飞行器总体设计部,北京 100094)
载人航天技术是世界航天的发展热点之一,不仅能反映一个国家航天技术的发展水平,而且成为衡量一个国家经济、技术和军事力量以及综合国力的一个重要标志。我国的载人航天工程于1992年立项,采用“三步走”的发展战略方针,建造空间站正是该战略方针最终目标[1]。空间站的建成和运营将使我国成为独立掌握近地空间长期载人飞行技术,具备长期开展近地空间有人参与科学技术试验能力,能够综合开发利用太空资源的国家,为人类和平利用太空作出开拓性的贡献。
2010年9月,中国载人空间站工程正式立项实施[2]。经过11年的不懈努力,2021年4月29日,天和核心舱在海南文昌航天发射场由长征五号B运载火箭成功发射入轨,拉开了我国载人空间站建造的大幕,标志着我国载人空间站工程进入任务实施阶段[3]。按计划,从2021年至2022年,通过11次发射及在轨飞行任务,我国将完成空间站的组装建造,转入正式运营阶段。截至目前,国外先后发射并进入太空运行的空间站包括苏联礼炮号,美国“天空实验室”,苏联和平号空间站,以及由美俄为首、16个国家参与建造的“国际空间站”[4-6]。我国天宫空间站的建设运行,将使我国成为继苏联/俄罗斯、美国之后第三个独立建设运行空间站的国家。
1 任务目标
天宫是一个具有浓郁中国特色的词汇,寄托着中华民族对于广袤太空的无限遐想。中国空间站取名为天宫,表明它是一个长期稳定运行的“太空母港”,可为在轨乘组提供舒适的驻留保障,可持续开展空间科学研究及技术试验探索,也可为来访飞行器提供必要的服务支持。通过天宫空间站的建设,我国将在特殊的太空环境中搭建起有人参与的科学探索与技术创新国家级太空实验室,航天员和科学家将经常往来于天地之间,开展大规模的空间科学实验和技术试验,进一步推动我国创新型国家建设,显著提升我国在国际科学技术领域的影响力。
天宫空间站的建设任务目标包含以下三个方面[7]:
(1)建造以天和核心舱、问天实验舱和梦天实验舱为基本构型,长期在轨可靠运行的空间站;
(2)为航天员长期在轨健康生活、有效工作提供保障,并在其他系统配合下,保证访问空间站航天员的安全;
(3)为开展多领域空间科学实验与技术试验提供保障和支持条件。
2 系统方案设计
作为世界上第三座多舱段在轨组装建造空间站,天宫空间站在系统设计上充分借鉴了和“平号”空间站和国际空间站的经验教训[8-9],坚持立足我国基本国情,秉持规模适度、安全可靠、技术先进、系统优化、经济高效的理念,充分利用我国载人航天前期技术基础,着力发挥后发优势,走出一条独立创新的跨越式发展道路。
2.1 设计原则
天宫空间站的设计遵循以下原则:
(1)符合中国国情,有所为、有所不为,规模适度,留有发展空间;
(2)具有突出的中国元素和核心内涵;
(3)追求技术进步,充分采用当代先进技术建造和运营空间站,全面掌握大型空间设施的建造和在轨操作能力;
(4)注重应用效益,在空间站应用领域取得重大创新成果;
(5)追求运营经济性,走可持续发展的道路。
2.2 总体方案
综合考虑载人飞船的发射场、着陆场地理位置以及返回的回归轨道,天宫空间站运行在轨道倾角41°~43°,轨道高度340~450 km的近地轨道上。其设计寿命大于10年,额定乘员3人,乘组轮换时可达6人。天宫空间站由天舟货运飞船负责运送推进剂、设备载荷和其他物资消耗品,并负责下行销毁废弃物的任务。载人运输任务则由神舟飞船负责。
天宫空间站由天和核心舱、问天实验舱和梦天实验舱三个基本舱段组成,呈T字构型。天和核心舱居中,问天实验舱和梦天实验分别连接于两侧,如图1所示。天宫空间站设置有前向、后向和径向3个对接口。前向对接口主要用于对接载人飞船和巡天空间望远镜,后向对接口主要用于对接货运飞船,径向对接口主要用于对接载人飞船[10]。

图1 天宫空间站构型图示Fig.1 Configuration diagram of Tiangong space station
天宫空间站以三舱构成完整的系统进行统一设计,整体构型设计借鉴了“和平号”空间站“积木组装”式的构型特点。为了避免“和平号”空间站各舱段间太阳电池翼遮挡严重的问题,整站长期飞行采取三舱布置在同一平面,减少了舱段间的舱体相互遮挡。两个实验舱构型、质量特性基本一致,在“T”字构型中呈横向对置,再结合每个实验舱近20 m的结构长度,形成了类似“国际空间站”的桁架结构。实验舱大面积太阳电池翼布局于整体构型的两侧,同时配置双自由度驱动机构,使太阳电池翼能够随时与太阳光线垂直,保证发电效率始终保持在最高状态。
2.3 建造过程
天宫空间站三舱基本构型采用空间交会对接和在轨舱段转位的方式完成建造,如图2所示。组装建造可分为如下五个步骤:
(1)第一步,发射天和核心舱,在载人飞船、货运飞船的配合下进行空间站组装建造的关键技术在轨验证;
(2)第二步,发射问天实验舱,与天和核心舱前向对接口交会对接,形成“一”字形两舱组合体;
(3)第三步,在梦天实验舱发射前, 将问天实验舱由天和核心舱前向对接口在轨转位至IV象限停泊口,形成“L”形两舱组合体;
(4)第四步,发射梦天实验舱,与天和核心舱前向对接口交会对接,形成“┠”字形三舱组合体;
(5)第五步,将梦天实验舱由天和核心舱前向对接口在轨转位至II象限侧停泊口,形成“T”形三舱组合体,完成天宫空间站基本构型建造。

图2 天宫空间站组装建造过程图示Fig.2 Schematic diagram of assembly of Tiangong space station
2.4 系统功能设计
2.4.1 控制及推进系统设计
天宫空间站姿态控制采用控制力矩陀螺(CMG)控制和发动机喷气控制两种方式,以CMG控制为主,喷气控制为辅。综合考虑舱段构型布局和维修性设计,天和核心舱与问天实验舱各配置1套CMG(每套6个,共12个),分别布置在舱外和舱内,如图3所示。通过不同飞行姿态对角动量控制的针对性需求,规划CMG按照1套开机或2套同时开机进行工作。
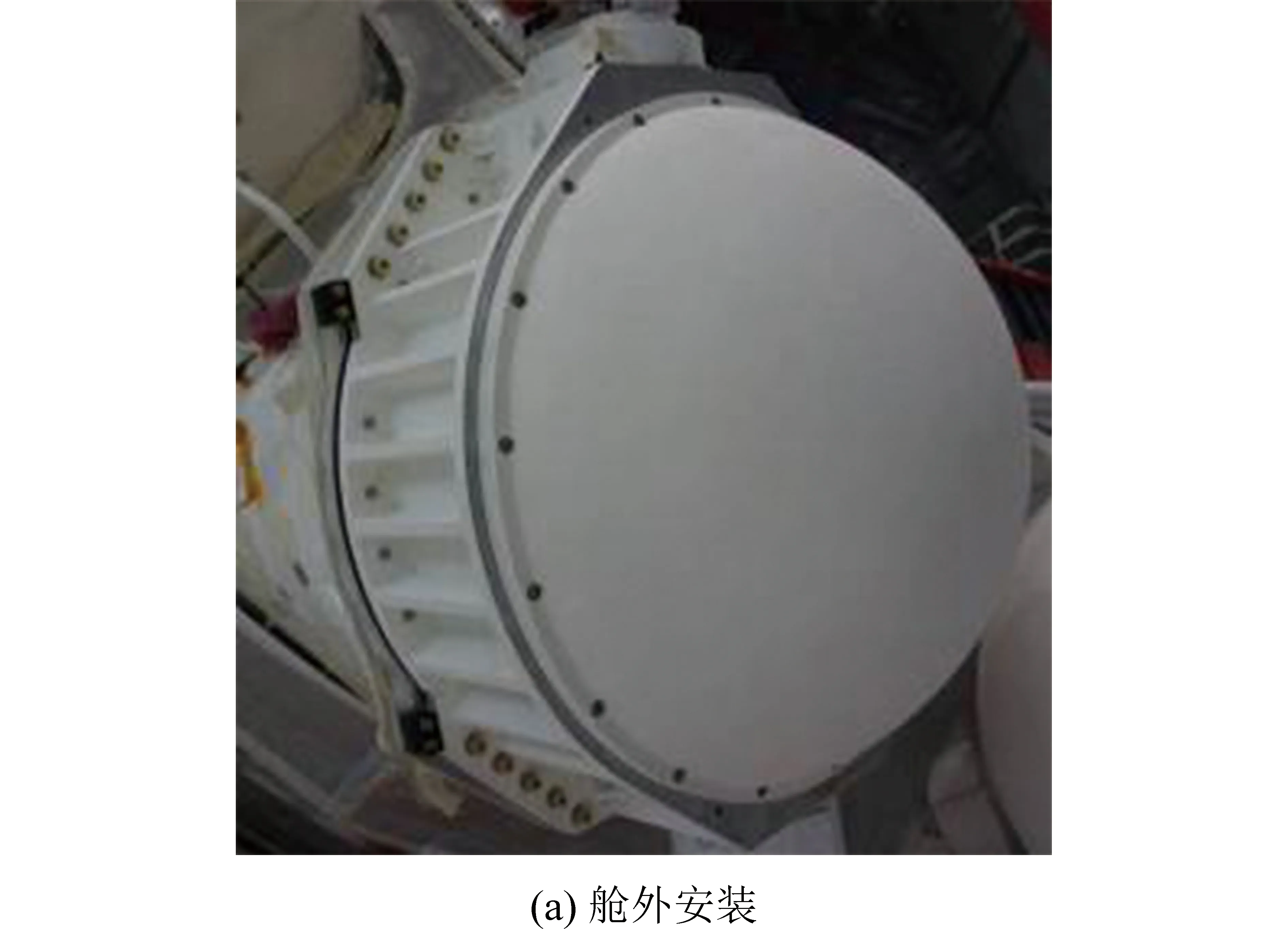
图3 天宫空间站上的CMGFig.3 CMGs on Tiangong space station
天宫空间站设计有对地定向飞行、惯性飞行、力矩平衡正向飞行3种正常情况下的飞行姿态。综合考虑太阳翼发电效率和姿控推进剂消耗,单舱和两舱组合体飞行期间主要采用惯性飞行姿态,三舱组合体飞行期间主要采用力矩平衡正向飞行姿态。对地定向飞行姿态由于推进剂消耗较大,主要在交会对接等特定任务中使用。在力矩平衡正向飞行姿态下,天宫空间站利用重力梯度力矩实现CMG角动量卸载,既可避免发动机喷气带来的姿控推进剂消耗,又可合理地规划发动机使用策略,避免其寿命过度使用。
为了实现天宫空间站在轨长期运行,在天和核心舱配置了推进剂补加系统,接受由天舟货运飞船所携带的推进剂。补加系统采用基于膜盒贮箱和增压气体复用的推进补加方案,配置了长寿命高可靠压气机,实现了增压气体的重复利用。在天和核心舱前、后向对接机构均配置了补加接口,保证了货运飞船在天和核心舱前向对接口或后向对接口对接时均可为天宫空间站补加推进剂,提高了任务的可靠性。另外,当巡天空间望远镜等来访飞行器在天和核心舱前向对接口停泊时,停泊在后向对接口的货运飞船可过路天宫空间站为巡天空间望远镜和其他来访飞行器跨舱提供推进剂补加。
此外,天宫空间站在天和核心舱上配置有的中功率(0.5~10 kW)霍尔电推进系统,作为化学推进系统的补充。霍尔电推进系统包括4台80 mN霍尔推力器和2个贮气模块,推力器的工质为氙气,贮气模块可通过机械臂在轨更换。这是国际上首次应用电推进系统用于辅助开展空间站的轨道维持,是天宫空间站在推进技术方面的一项重要创新(如图4所示)。电推进系统可减缓空间站轨道衰减速度,还可为空间站节省化学推进剂,减轻了货运飞船补给运输的压力。

图4 电推进系统试车照片Fig.4 Test images of electric propulsion system
2.4.2 能源系统设计
为提升发电能力,天宫空间站配置了大面积柔性太阳翼作为发电设备,采用转换效率30%的三结砷化镓电池片以及先进的锂离子蓄电池。天和核心舱太阳翼单翼展开长度12.6 m,采用单自由度驱动机构驱动(如图5所示)。问天和梦天实验舱太阳翼单翼展开长度27 m,阵面面积超过110 m2,采用双自由度驱动机构驱动,太阳翼可在轨收拢和展开,支持在轨维修和更换。天宫空间站采用标准100 V母线体制,各舱之间通过并网统一供电,可向停靠的载人飞船和货运飞船提供一定功率的电能。两个实验舱之间还可实现能源动态调配,为所需舱段的科学实验载荷用电提供支持。
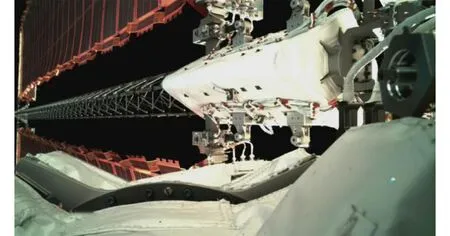
图5 天和核心舱太阳翼在轨展开图示(在轨任务图片)Fig.5 On-orbit unfolding of solar arrays on Tianhe core module (on-orbit mission)
天宫空间站形成T字形三舱组合体后,天和核心舱太阳翼容易被实验舱的舱体和太阳翼遮挡,发电效率降低。通过将天和核心舱太阳翼收拢、拆卸、转移到两个实验舱尾部,可拓展整站的发电能力(如图6所示)。该任务是在舱外两个机械臂的组合使用下,通过多次航天员出舱活动完成的,将充分展现天宫空间站对于舱外大型设备转移、再建的扩展能力。
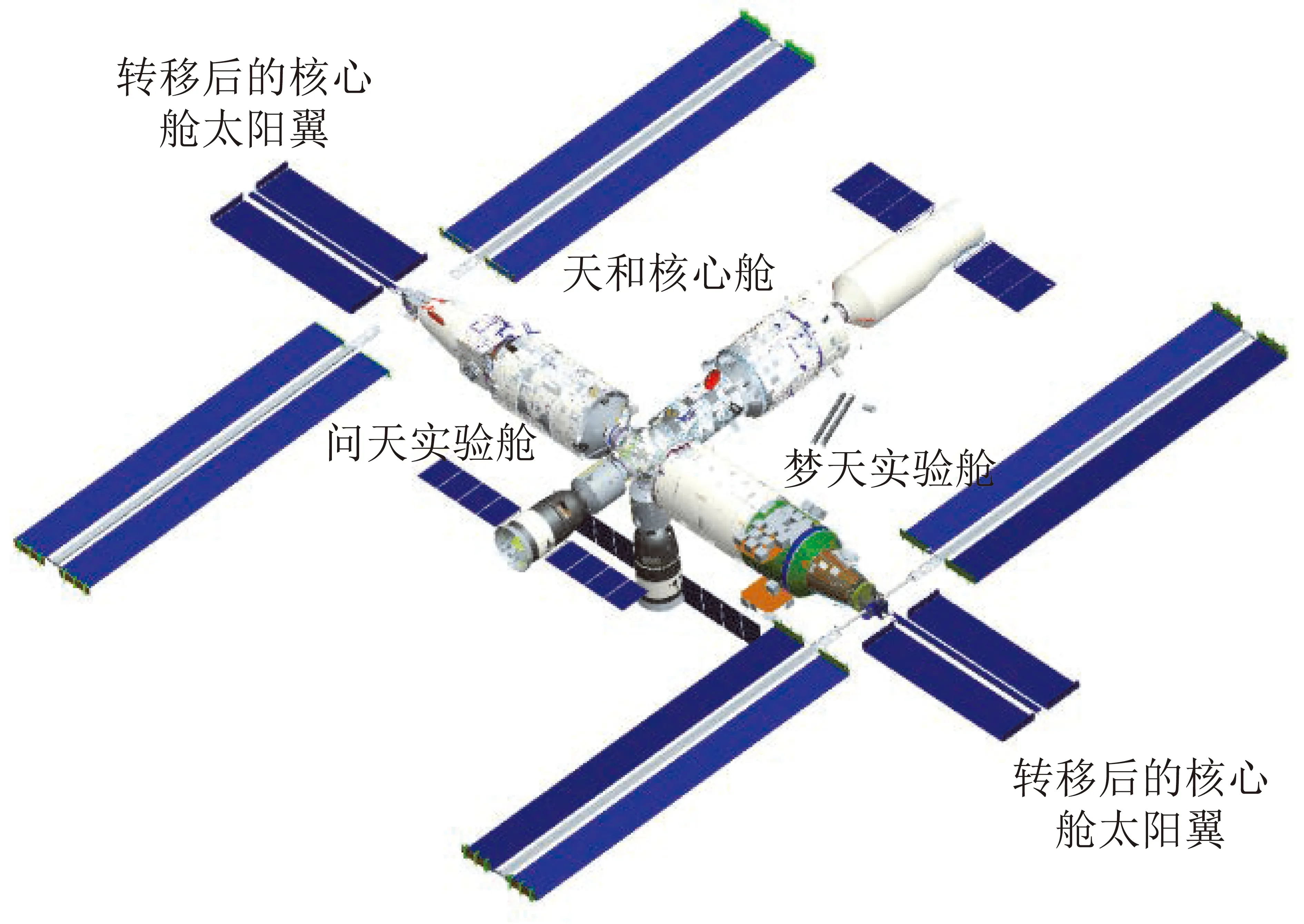
图6 天和核心舱太阳翼转移安装后构型Fig.6 Configuration after transfer and reinstallation of solar arrays of Tianhe core module
2.4.3 载人环境系统设计
天和核心舱与问天实验舱均配备了全套再生生保系统和非再生生保系统,梦天实验舱配备了简化的非再生生保系统。核心舱再生式生保系统负责整站载人环境控制,非再生设备作为辅助;问天实验舱再生生保系统作为载人环境控制的系统级备份。
天宫空间站再生生保系统采用物理化学再生方式[11],包含了电解制氧、微量有害气体去除、CO2去除、水处理、尿处理、CO2还原6个子系统。电解制氧系统提供航天员生活所必须的O2。CO2去除系统可将人体产生的CO2经可再生吸附剂吸附并利用舱外真空热解吸[12]。针对不同的微量有害气体,采用化学吸收、物理吸附、常温催化氧化和高温催化氧化等手段去除[13];再生吸附装置通过真空热解吸将大部分微量有害气体排到舱外,实现吸附剂再生。人体尿液经尿处理系统蒸馏后生成尿蒸馏水,再与舱内收集的冷凝水一同经水处理系统处置。水质可以满足航天医学饮用水要求和电解制氧用水要求。在空间站建造及运营阶段,通过CO2还原系统,将从CO2去除系统中收集、浓缩后的CO2与电解制氧的副产物H2反应生成CH4和水,经水处理系统净化后再用于补充航天员饮水,进一步提高生命保障系统的物质闭环程度,降低对在轨驻留消耗品的补给需求。经在轨数据综合评估,舱内的氧气和水基本实现了不依赖地面上行,极大地减轻了货运飞船补给运输的压力。
2.4.4 机械臂系统设计
天宫空间站在天和核心舱配置1个7自由度大机械臂,作业半径为10 m,最大负载25 t,在问天实验舱配置1个7自由度小机械臂,作业半径为5 m,最大负载3 t(如图7所示)。两个机械臂均配置了丰富的视觉测量、关节力矩、末端力传感器,可独立、组合或协同使用,完成舱段转位、辅助航天员出舱、舱外货物转移、舱外载荷照料、悬停捕获来访飞行器等复杂在轨任务[14]。大机械臂主要负责大负载大范围转移,小机械臂主要负责小负载精细化操作,组合臂主要执行航天员或舱外载荷的大范围操作任务。双臂组合后作业半径可达15 m。
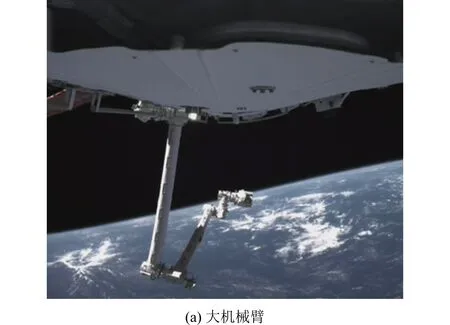
图7 天宫空间站机械臂(在轨任务图片)Fig.7 Robotic arm of Tiangong space station (on-orbit mission)
大小机械臂均具有重定位能力,形象地说就是能头尾互换地进行“爬行”。天宫空间站舱体表面安装了多个机械臂适配器,在它们的配合帮助下两根机械臂可以在舱体表面灵活移动,大大扩展了任务灵活性和活动范围。
2.4.5 出舱活动设计
出舱活动是保障空间站长期可靠运行,完成舱外组装建造和舱外作业,开展舱外载荷操作的必要手段。天和核心舱节点舱和问天实验舱专用气闸舱均支持航天员出舱活动。天和核心舱单舱飞行期间利用节点舱出舱;问天实验舱对接后,使用专用气闸舱出舱,节点舱作为备份,如图8所示。此外,安装在空间站舱外的设备(含舱外载荷)则通过梦天实验舱货物气闸舱实现自动出舱,如图9所示。该项功能有效的减少了航天员的出舱次数,提高了舱外作业效率,进一步保证了航天员的安全。

图8 航天员出舱场景(在轨任务图片)Fig.8 Scenario of crewmember exiting the module (on-orbit mission)

图9 货物专用气闸舱图示Fig.9 Special airlock module for cargo
2.4.6 组装建造设计
天宫空间站的组装建造任务主要由交会对接和舱段转位实现。在空间站运营阶段,通过航天员出舱活动,将天和核心舱太阳翼转移至问天实验舱和梦天实验舱尾部桁架安装,扩大空间站的发电能力。
1)交会对接
天和核心舱具备接纳从8 t量级载人飞船到23 t量级实验舱等多种飞行器交会对接的能力。交会对接方式包括前向、后向和径向,对接轨道高度为393±10 km。根据来访飞行器的不同任务特点,交会对接时长可持续1~5天不等。交会对接以自动控制模式为主,为提高飞行任务的可靠性,天和核心舱还配置了手控遥操作交会对接设备。在最后的平移靠拢段,核心舱内的航天员可通过观测实时图像操作控制手柄,对实验舱、货运飞船、巡天空间望远镜等飞行器进行遥控对接,如图10所示。

图10 天和核心舱与天舟货运飞船手控遥操作对接在轨试验(在轨任务图片)Fig.10 Manual remote control docking test between Tianhe core module and Tianzhou cargo spaceship (on-orbit mission)
实验舱采用了“n圈+6脉冲”的全相位快速交会对接方案,如图11所示,在天地协同模式下,首次使用了通过地面制导软件计算快交策略并注入执行的飞行控制策略。通过预留“n圈”的大相位追及圈次,可实现实验舱对核心舱组合体360°全相位追踪。问天实验舱于2022年7月24日发射入轨后,自主实施6次快交脉冲后准确转入自主控制阶段,共计用时13 h完成与核心舱组合体交会对接,实现了世界首次23吨级追踪飞行器的快速交会对接任务。实验舱柔性太阳翼长27 m,采用二次展开方案,对接前展开约6.5 m,动力学特性满足交会对接控制要求;对接后太阳翼全展开,动力学特性满足天宫空间站长期在轨控制精度要求。该策略在梦天实验舱飞行任务中再次得到应用验证。

图11 实验舱快速交会对接策略图示Fig.11 Fast rendezvous and docking scheme of experiment module
2)舱体转位
通过舱段转位技术,将问天实验舱和梦天实验舱转位至节点舱侧向停泊口,实现天宫空间站三舱组合体的组装建造,如图12所示。梦天实验舱发射前,将问天实验舱由节点舱前向对接口转位至IV象限停泊口永久停泊。梦天实验舱与核心舱对接后,将梦天实验舱由节点舱前向对接口转位至II象限停泊口永久停泊。问天实验舱与梦天实验舱分别于2022年9月30日和11月3日完成转位任务,空间站T字基本构型建造完毕。
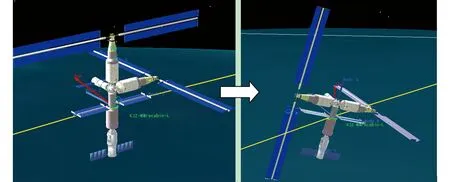
图12 天宫空间站舱段转位示意图Fig.12 Schematic diagram of module transferring
天宫空间站舱段转位任务以转位机构转位为主份,大机械臂转位为备份。转位机构转位实验舱期间,大机械臂在核心舱待命,通过臂上摄像机对转位过称进行全程监视,同时具备实时备份接手的条件。与和平号空间站采用“翻转式”转位模式不同,天宫空间站采用“平转式”转位方案,即实验舱与核心舱始终处于一个平面内,如图13所示。这种转位模式既有利于实验舱舱外天线和敏感器在不同飞行剖面中的统一化配置及综合利用,也有利于空间站长期在轨飞行的测控覆盖。为保证转位过程整站姿态漂移小,转位过程采用重力梯度被动稳定控制。
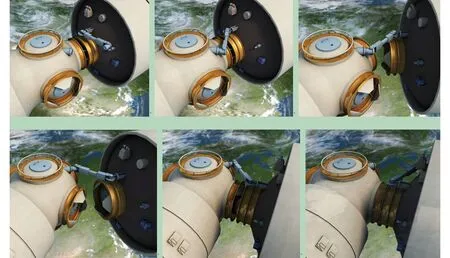
图13 转位机构转位实验舱全过程示意图Fig.13 Whole process of experiment module transferring by transferring manipulator
3 技术特点及先进性
总体来看天宫空间站技术特点主要体现在设计理念先进、新技术比重大、建造费效比高、驻留安全高效等4个方面。
3.1 设计理念先进,系统架构优化
天宫空间站充分发挥了由我国一国独立研制的优势,在设计之初就高度重视系统层面的设计架构和技术体制,坚持“1+1+1=1”的设计理念,重点突出系统顶层设计,实现三舱间系统融合、接口匹配。在产品实现层面,各分系统采用相同的研制规范,统一制定了元器件选用要求、原材料选用要求、通用计算机选用要求等规范性技术文件。分系统针对三舱功能制定产品配套,产品通用化率大于80%。形成组合体后,原本独立的三舱形成一个有机的整体,在天和核心舱的同一管理下,各舱段的控制系统、能源系统、信息系统、热控及载人环境系统跨舱互联,协同工作。例如,在舱段间进行千瓦级大功率供电调配的同时,将舱段间的热控流体回路连通,实现千瓦级热量的跨舱传输,均衡各舱段热控辐射器的散热能力。
同时,整站充分利用了快速发展的先进信息网络技术,实现了舱段间资源的高效融合使用,提高了空间站整体能力和系统可靠性。例如,当天和核心舱的控制系统、能源系统、信息系统或载人环境系统出现异常且短时间内不可修复时,天宫空间站可自动将控制权切换至问天实验舱,保证在轨任务可靠执行。此外,天宫空间站与神舟载人飞船和天舟货运飞船的技术体系也保持一致,使得神舟载人飞船和天舟货运飞船与天宫空间站对接后也能构成有机整体,参与组合体的管理。例如,天宫空间站的计算机可控制天舟货运飞船的发动机进行组合体轨道和姿态控制,也可通过天舟货运飞船的中继天线下行百兆高速数据。天宫空间站既可对神舟载人飞船、天舟货运飞船、巡天空间望远镜等来访飞行器进行并网供电,也可接受天舟货运飞船的反向供电支持。天宫空间站既可对神舟载人飞船提供热支持,也可接受神舟飞船内的产品对其进行辅助除湿。
3.2 新技术比重大,智能化程度高
1)新技术应用
我国是在经过空间实验室阶段任务,突破了交会对接等关键技术的基础上,经充分地面试验验证,引入新技术进行天宫空间站的组装建造,走出了一条稳健的跨越式发展道路。新技术比重大是天宫空间站的显著特征,其采用的空间机械臂技术、物化式再生生保技术、大面积柔性太阳翼技术等均为我国首次在轨应用的全新技术,应用难度大、研制风险高。
针对新技术应用带来的在轨飞行任务风险,天宫空间站按照逐步开展、稳步推进的策略开展研制,逐级提高技术成熟度。在天和核心舱发射入轨后,专门设置了关键技术在轨验证阶段,为期约1年时间。在神舟载人飞船和天舟货运飞船的配合下,利用天和核心舱对后续空间站组装建造的关键技术进行全方位在轨验证,特别是对存在较大天地差异、无法通过地面测试试验全面验证的关键技术进行在轨验证。例如,通过核心舱太阳翼、大机械臂在轨测试验证,为问天实验舱所携带的实验舱太阳翼、对日定向装置、小机械臂等复杂产品的研制提供了充足的在轨数据支持,为后续在轨操作提供了详实的测试方案、协同程序、飞控策略。
新技术比重大也是天宫空间站充分利用后发优势实现新技术应用的具体体现。得益于近年来信息技术的飞速发展,天宫空间站充分利用先进信息网络技术来提升平台能力。基于我国第二代中继卫星的天地链路传输速率达到1.2 Gbit/s,为“国际空间站”的2倍。通过高速以太网为科学实验载荷直接提供服务系统,既能满足载荷数据传输的高性能要求,又为地面技术向在轨航天器移植提供了极大的便利。
2)智能化水平
天宫空间站从设备及系统层面均体现了较高的智能化程度。例如,通过设置无线Wi-Fi网络及语音图像系统,航天员可使用智能手机、平板电脑对生活家居及在轨物资进行智能化管理。整站配置了压力泄漏检测系统,当密封舱失压时自动报警,根据失压等级提醒航天员采取堵漏、隔离等措施。当整站出现供电能力下降、推进剂泄漏、辐射器泄漏等紧急重大故障时,通过高性能计算机系统实现故障自主诊断,自动隔离危险源,进行安全性处置。
3)数字化建设
天宫空间站从方案设计阶段开展,全面应用数字化技术,实现了三维设计、三维出图、三维图纸下厂、数字化制造、无纸化总装和检验、数字化质量确认,实现了从产品设计到研制、验收的全面数字化,大幅度提高了工作效率。
通过全面开展了数字仿真工作,研制人员针对天宫空间站的建模仿真技术取得了长足发展[15-16]。突破地面试验条件限制,将数字仿真和物理试验相结合,完成了空间站机械臂、柔性太阳翼、出舱活动任务、舱段转位任务等地面验证,利用单机物理试验修正仿真模型,利用仿真模型实现系统级的任务仿真验证。
基于MBSE技术建立了数字空间站,在飞行任务期间实时数据驱动伴飞,预测整站健康趋势,并利用数字空间站对出舱活动、舱段转位、组合体运行、机械臂操作等任务进行仿真验证和专业技术支持。在工程总体协调和支持下,数字空间站功能将集合载人船、货运飞船、空间应用系统的仿真模型,实现全功能数字空间站。
3.3 整站规模适度,建造费效比优
天宫空间站三舱质量约为69 t,虽然与123 t的和平号空间站、423 t的“国际空间站”相比,规模相对较小,但从建造成本和应用效益的角度综合分析,这是一个符合中国国情和实际需要的理性选择。天宫空间站通过整体统一优化设计,建成后在控制、信息、能源、资源再生利用、物资补给需求、运营成本、应用效益等方面均将达到当代国际先进水平,并在一些方面有所超越,在建造和运营上更为经济合理。
1)发电效能高
天宫空间站能源系统在载荷支持功率和单位质量功率密度方面达到国际先进水平。“国际空间站”110 kW的发电功率中提供给应用载荷的功率为50 kW,占总功率的45%。天宫空间站供电指标为27 kW,提供给应用载荷的功率为17 kW,占总功率的63%。同时,天宫空间站功率质量比为0.41 kW/t,超过了国际空间站0.26 kW/t的功率质量比指标。
2)应用支持能力强
天宫空间站舱内试验支持设施与国际空间站类似,采用标准化机、电、热、信息保障条件,可开展航天医学、生命与生物科学、空间材料科学、空间物理科学、以及航天新技术试验[17-18]。天宫空间站共安装实验机柜25个,“国际空间站”安装试验机柜31个。天宫空间站以约“国际空间站”1/6的质量,提供了约4/5的实验机柜数量,体现了很高应用支持效率[19-20]。
天宫空间站具有很强的舱外应用载荷支持能力。相比而言,和平号空间站未设置单独的舱外试验平台,国际空间站在日本希望号实验舱设置了舱外试验平台。在日本舱小机械臂的独立支持下,支持12个舱外载荷的照料。天宫空间站则在问天实验舱和梦天实验舱分别设置了固定式和展开式暴露平台(见图14),共计支持67个标准舱外载荷。通过双臂与专用货物气闸舱相结合,天宫空间站对舱外载荷的操作效率极高。
总体而言,天宫空间站对载荷的支持能力不小于21吨,虽不及“国际空间站”约33.5 t,但载荷质量占比天宫空间站的高达30.6%,远大于“国际空间站”7.93%的指标实现。
除了上述常规的应用支持能力外,天宫空间站还具备高水平的在轨服务能力,可支持未来有人参与的空间设施在轨组装建造应用。另外,天宫空间站也可作为未来载人深空探测关键技术的先期验证平台,通过现有应用载荷支持设施或者扩展建设专用的支持设施,开展相关关键技术在轨验证,有效降低载人深空探测任务实施技术风险。

图14 固定式和展开式暴露平台Fig.14 Fixed and deployable exposure platforms
3)建造方式多样
国外空间站建造主要采取两种方式:一是以和平号空间站为代表,由运载火箭将舱段送入轨道,各舱段直接交会对接和在轨转位完成组装,其建造过程简单、成本较低;二是以“国际空间站”为代表,由航天飞机携带舱段入轨,大型机械臂与航天员出舱协作组装,建造过程灵活,但成本和操作风险较高。天宫空间站建造方式则更为优化,综合运用了上述两种方式,可采用舱段直接交会对接和在轨转位等方式完成舱段组装,可采用机械臂对来访飞行器悬停捕获的方式进行扩展组装,还可同时通过机械臂操作和航天员出舱活动,进行大型舱外设备,如柔性太阳翼、大型舱外载荷在舱段间的转移及安装。
4)补给需求适当
和平号空间站长期驻留3人,年均补给2艘载人飞船,4艘货运飞船,物资总质量16 t。“国际空间站”长期驻留6人,年均补给4艘载人飞船,8艘货运飞船,补给物资质量约30~40 t[21]。天宫空间站运营期间将长期驻留3人,年均补给约2艘载人飞船和2艘货运飞船,补给物资质量约12 t。总体看天宫空间站运行补给需求规模适中,与其整体规模和能力相适应,体现了较高的经济性。此外,电推进系统在天宫空间站上的成功应用,也有利于降低长期运营期间对推进剂的补给需求。
3.4 坚持以人为本,驻留安全高效
天宫空间站研制坚持以人为本的理念:一方面确保航天员在轨驻留的安全舒适;另一方面注重支持航天员主观能动性的有效发挥,充分体现人在空间站建造和运营中的独特作用。
在驻留安全性方面天宫空间站结合多舱段多航天器特点,充分利用系统重构和冗余设计,按照“一重故障保证任务连续、二重故障保证在轨安全”的原则,确保航天员在轨安全。例如,除问天实验舱配置的主份气闸舱外,还将天和核心舱节点舱作为备份气闸舱;在出舱过程中如果主份气闸舱出现问题,航天员能通过节点舱进入舱内,保证出舱活动的安全可靠。
天宫空间站针对高效的人机协同模式开展了大量工作,例如在天和核心舱内配置了机械臂操作台,可由航天员操控机械臂完成出舱活动作业点调整、在轨巡检等任务。为了支持航天员进行设备在轨维修操作,一方面可维修更换的设备均根据工效学要求进行了专项设计,另一方面为航天员配置了功能完备的在轨维修工具,助力航天员高效完成维修任务。在支持航天员舱外活动方面,天宫空间站从通信、照明、图像、助力设置、指示标识等方面进行了全方位的综合优化设计,保障舱外活动的安全高效开展。
4 后续应用展望
天宫空间站完成三舱组装建造后将在轨运营10年以上,成为有人参与的科学探索与技术创新国家级太空实验室。下面从科学实验与技术试验、在轨服务、技术升级、扩展建造、国际合作等方面对天宫空间站的后续应用发展进行展望。
4.1 科学实验与技术试验
天宫空间站在轨运营期间将利用舱内外的实(试)验支持设施持续滚动开展各类科学实验和技术试验,主要研究方向包括:航天医学、空间生命科学与生物技术、空间天文与天体物理学、微重力流体物理与燃烧科学、空间材料科学、微重力基础物理、空间地球科学及应用、空间环境与空间物理、航天新技术、天基信息技术、航天元器件与部件等[22-23]。天宫空间站可充分发挥平台规模大、有人参与、能力可拓展、实(试)验设施可升级、载荷可更换、实(试)验项目可迭代的优势不断推动我国空间科学技术的创新发展。同时,通过空间科技成果的推广应用与转移转化,辐射带动相关产业的技术变革和升级,为国民经济高质量发展和国家竞争力提升做出贡献。为了在天宫空间站上有效开展在轨科学实验和技术试验,除了专业的航天员外,相关领域的载荷专家也将进驻天宫空间站,利用站上的实(试)验设施开展科学技术研究。
4.2 在轨服务
天宫空间站可作为近地轨道在轨服务平台,开展共轨飞行在轨服务、在轨设施建造服务等类型服务。
1)共轨飞行在服务
天宫空间站运营期间将发射巡天空间望远镜与空间站共轨飞行。巡天空间望远镜是我国第一个大口径、大视场空间天文望远镜,用于巡天科学研究。巡天空间望远镜长期与天宫空间站共轨飞行,短期对接停靠,通过空间站对巡天空间望远镜进行推进剂补加和维护维修等在轨服务。天宫空间站与巡天空间望远镜组合体如图15所示。这种长期共轨飞行、短期对接停靠的在轨服务运行模式是天宫空间站在运行模式上的重要创新。除了巡天空间望远镜外,未来还将可能有更多的航天器与天宫空间站共轨飞行接受在轨服务,天宫空间站将逐渐发挥“太空母港”的重要作用[24]。

图15 天宫空间站与巡天空间望远镜组合体Fig.15 Assembly of Tiangong space station and Xuntian space telescope
2)在轨设施建造服务
可考虑利用天宫空间站进行大型空间天线、大型空间望远镜等复杂设施的在轨组装建造。这些设施目前主要采用发射后在轨展开的方式进行部署,主要存在两方面问题:一是随着尺寸的增大,展开机构越来越复杂,大大增加了在轨展开部署的风险;二是未来对相关设施的尺寸要求越来越大,发射后在轨展开的方式将失去技术可行性。利用天宫空间站进行相关设施的在轨建造可有效解决这两方面问题;一方面针对展开风险的问题,由于空间站具备航天员在轨维修功能,建造过程中出现故障还可进行在轨维修补救,降低任务风险;另一方面空间站上微重力环境有利于超大尺寸设施的在轨制造,可有效解决发射过程对设施尺寸限制问题。
天宫空间站上的在轨设施建造服务可通过航天员出舱活动或借助已配置的大、小机械臂来实现,也可通过后续研发专门的空间智能机器人来进行操作。在大、小机械臂成功应用的基础上,研发空间智能机器人,辅助或代替航天员开展舱外作业,是一条重要且必要的技术发展途径。一种典型的空间智能机器人如图16所示,由两条灵巧机械臂、一条中型机械臂和躯干等组成。它可作为小机械臂末端的灵巧执行结构,或者单独固定在空间站舱外,通过多臂协同完成高危险、长时间的设备照料和舱外巡视任务。
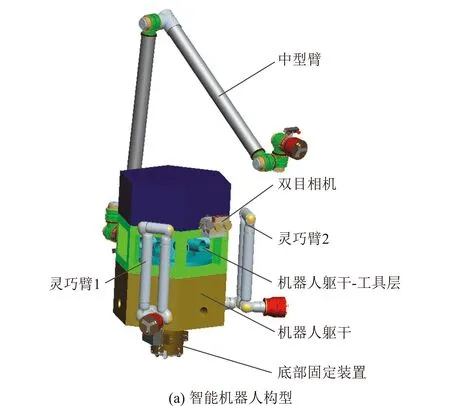
图16 空间作业智能机器人Fig.16 Intelligent robot for space operation
此外还可考虑在天宫空间站上配置3D打印(见图17)等手段,提供空间设施的在轨制造服务,进一步提升天宫空间站在轨设施建造服务能力。
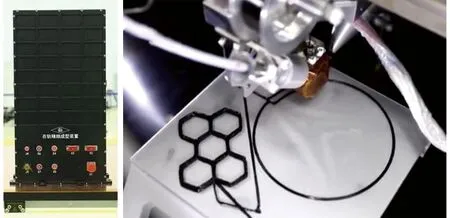
图17 我国新一代载人飞船试验船上搭载的3D打印机Fig.17 3D printer equipped in test ship of new generation manned spaceship in China
4.3 在轨技术升级
由于天宫空间站的设备可在轨由航天员和机械臂进行维修维护,站上的软件也可通过地面上行注入进行版本升级,因此天宫空间站在运营期间可不断根据技术发展进行在轨技术升级,持续提升空间站平台的技术水平。主要可考虑如下方面的技术升级。
1)舱外监视系统升级
在运营阶段,可研制集照明云台和高清摄像一体化的监视系统,充分利用舱外已预留的供电接口及5G Wi-Fi高速无线传输系统,逐步将舱外的照明、摄像系统进行升级、融合,实现全方位高清拍摄。
2)智能化技术升级
当前人工智能、大数据等先进信息化技术飞速发展,在天宫空间站十年以上的运营期间可充分利用相关技术对空间站进行智能化升级。例如:配置航天员智能助理,利用智能语音交互技术实现航天员与空间站的高效交互,为航天员提供在轨支持;对天宫空间站自主故障诊断与处置功能进行智能化升级,提升空间站在轨故障处置能力;配置舱内洁净机器人,辅助航天员进行舱内的清洁工作,减少航天员用于舱内清洁的时间。
3)机械臂技术升级
为提升空间站机械臂的在轨操作能力,运营阶段可考虑对配置的两根机械臂的软硬件进行技术升级。在硬件升级方面可考虑通过更换计算性能更高的控制计算机,提升机械臂的信息处理能力,以及更换更先进的臂上相机,提升机械臂的视觉感知能力,或者在机械臂末端安装专用工具,实现更加多元化的操作。在软件方面可考虑通过控制软件在轨注入升级,提升任务执行的自主能力和安全保障能力。
4.4 在轨扩展建造
天宫空间站建造完成后将在轨运营10年以上,具备良好的舱段扩展和应用支持扩展能力,可根据空间科学技术研究、空间应用和国际合作的需要,进行灵活地扩展。天宫空间站在设计阶段即对未来的扩展方案进行了统筹考虑。在现有三舱构型基础上,预留了机、电、热等扩展接口,具备扩展为四舱组合体的能力,扩展舱永久停泊于天和核心舱的前向停泊口,天舟货运飞船停靠于天和核心舱后向对接口,神舟载人飞船停靠于扩展舱的前向对接口。四舱组合体形成后,可通过进一步发射后续扩展舱段,形成180 t级的六舱组合体,如图18所示。
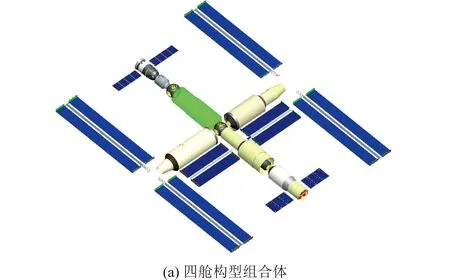
图18 天宫空间站扩展组合体构型示意图Fig.18 Configuration diagram of expanded assembly of Tiangong space station
可展开式充气密封舱可作为近地空间站扩展密封舱体[25],也可作为未来太空移民的居住舱,还可支持太空驻留与旅游等商业航天项目。
此外,天和核心舱在舱外预留了2个大型载荷挂点的扩展接口,支持在轨扩展安装大型载荷。问天实验舱舱外预留1个大型载荷挂点接口和1个扩展载荷试验平台接口,一方面支持大型载荷的在轨安装,另一方面可挂接扩展式暴露平台,进一步安装舱外载荷。
在扩展建造方式方面,扩展舱段一般应具备独立飞行以及与天宫空间站交会对接的能力,扩展暴露平台等其他扩展设施则可通过半开放或全开放式天舟货运飞船上行安装。天宫空间站配置的机械臂也为扩展建造提供了有利条件,可实现扩展舱段、扩展暴露载荷平台等扩展设施的灵活转移和组装。
4.5 国际合作
作为国家级太空实验室和国际科技合作交流平台,本着“和平利用、共同发展、互利互惠”的原则,天宫空间站可为世界各国提供科学实验平台,为各国航天员或载荷提供在轨飞行机会。天宫空间站的国际合作模式可分为三个层次。
1)有效载荷合作
如本文4.1节所述,天宫空间站对有效载荷提供了标准化及专用化资源。凡是符合约定统一的机、电、热、机械臂接口条件的有效载荷,都可以在天宫空间站内开展应用。这是国际合作的第一个层面,可合作的有效载荷包括如下三个模式:
(1)独立研制或与我国联合研制的实(试)验装置,安装在密封舱机柜中运行;
(2)独立研制或与我国联合研制的实验方案(含实验样品、实验单元或实验设计),安装在密封舱机柜中由我国已研制的实验装置内运行;
(3)独立研制或与我国联合研制的舱外载荷,安装在舱外预留的载荷适配器上运行。
2)航天技术合作
天宫空间站作为长期在轨运行的载人航天器,对于带动并发展后续的航天技术,可起到良好的试验平台作用。通过国际合作,可期望在如下技术方面有所实质性的突破。这是国际合作的第二个层次。
(1)新一代再生生保技术;
(2)长期在轨驻留医学防护技术;
(3)空间机器臂、空间机器人技术;
(4)空间非合作交会对接技术;
(5)空间碎片监测、减缓和防护技术;
(6)新型轻量化、高强度结构技术。
3)舱段级合作
国际合作的第三个层次是大型舱段级合作,共同对天宫空间站进行扩展。该层次的合作可包含如下模式。
(1)研制扩展实验舱,与天宫空间站对接,对空间站的基本功能及载荷支持能力进行扩展;
(2)研制多功能节点舱,与天宫空间站对接,该节点舱可进一步预留穹顶舱或其他密封舱的对接接口;
(3)研制可展开式充气密封舱,由开放式货运飞船携带上行,通过机械臂安装在天宫空间站上,在轨展开;
(4)研制自由往返飞行器进行在轨技术试验,可在天宫空间站临时停靠,利用空间站资源进行维修维护或资源补给。
5 结束语
天宫空间站充分继承了我国载人航天工程前期的研制技术基础,汲取了国际上已服役空间站的经验教训,立足我国基本国情并完成独立创新的跨越式发展。天宫空间站注重系统级设计及优化,创新性地采用当代先进技术提升整体性能,有利于航天员能动性的充分发挥,具有突出的中国元素和核心内涵。天宫空间站注重应用效益,规模适度且留有发展空间,可为后续国家重大任务和国际合作提供优良的服务平台。目前,天宫空间站三舱基本构型已在轨组装建造完毕。未来天宫空间站作为我国国家级太空实验室将在轨长期运行,持续开展科学技术研究和在轨服务,并进行技术升级与扩展建造,为人类太空探索和科技发展贡献中国力量。
参考文献(References)
[1] 周建平. 我国空间站工程总体构想. 载人航天, 2013, 19(2): 1-10
Zhou Jianping. Chinese space station project overall vision[J]. Manned Spaceflight, 2013, 19(2): 1-10 (in Chinese)
[2] 中国载人航天办公室. 空间站工程研制进展[R].北京: 中国载人航天办公室, 2016
China Manned Space Engineering Office.Development of space station engineering[R]. Beijing: China Manned Space Engineering Office, 2016 (in Chinese)
[3] 王翔, 王为. 天宫空间站关键技术特点综述[J]. 中国科学: 技术科学, 2021, 51(11): 1-12
Wang X, Wang W. Key technical characteristics of the Tiangong spacestation[J]. Scientia Sinica Technologica, 2021, 51(11): 1-12 (in Chinese)
[4] Sorokin IV, Markov AV. Utilization of space stations: 1971-2006[J]. Journal of Spacecraft and Rockets, 2008, 45(3): 600-607
[5] Cynthia A E. International Space Station science research accomplishments during the assembly years: An analysis of results from 2000-2008, NASA/TP-2009-213146[R]. Washington D.C.: NASA, 2008
[6] Timothy W G. The International Space Station: systems & science,20100018503[R]. Washington:NASA, 2010
[7] Yang H. The “Tiangong” Chinese Space Station project[J]. Front. Eng. Manag, 2018, 5(2): 278-283
[8] Brewster H S. International Space Station: its history, challenges, and successes, AIAA2003-0002[R].Washington: AIAA, 2003
[9] Bill S, Joe B, and John B. International Space Station systems engineering case study,ADA538763[R]. Washington: Air Force Center for Systems Engineering, 2010
[10] Yang H, Zhang Q. Introduction to manned environment and scientific experimental resources of China Space Station[C]// Proceedings of the 69th International Astronautical Congress. Pairis:IAC, 2018
[11] 吴志强, 高峰, 邓一兵, 等. 空间站再生生保关键技术研究[J]. 航天医学与医学工程, 2018, 31(2): 105-111
Wu Zhiqiang, Gao Feng, Deng Yibing, et al. Key technology review of research on regenerative environmental control and life support system for space station[J]. Space Medicine & Medical Engineering, 2018, 31(2): 105-111 (in Chinese)
[12] Alptekin G, Hitch B, Dubovik M. Prototype Demonstration of the Advanced CO2removal and reduction system[C]// Proceedings of the 35th International Conference on Environmental Systems. Warrendale:SAE, 2005
[13] Graf J, Wright J, and Bahr J. A regenerable sorbent bed for trace contaminant removal[C]//. Proceedings of the International Conference on Environmental Systems. Warrendale:SAE, 1999
[14] 李大明, 饶炜, 胡成威, 等. 空间站机械臂关键技术研究[J]. 载人航天, 2014, 20(3): 238-242
Li Daming, Rao Wei, Hu Chengwei, et al. Key technology review of the research on the space station manipulator[J]. Manned Spaceflight, 2014, 20(3): 238-242 (in Chinese)
[15] 孙乐丰,王为.机械臂转位舱段过程的多学科集成仿真.航天器工程, 2017,26(5):126-134
Sun Lefeng,Wang Wei. Multi-disciplinary integrated simulation in space robotic arm aided module redocking[J]. Spacecraft Engineering, 2017,26(5):126-134 (in Chinese)
[16] 邢涛, 孙乐丰, 王为, 等.数字空间站动力学与控制仿真建模与飞控应用[J]. 空间控制技术与应用, 2021, 47(5) :40-47
Xing Tao,Sun Lefeng,Wang Wei,et al Digital space station dynamic and control simulation modeling and flight control application[J]. Aerospace Control and Application, 2021,47(5):40-47 (in Chinese)
[17] Yang H, Yang B, Wei C F Design on experiment support onboard manned space station[C]// Proceedings of the 64th International Astronautical Congress. Paris:IAC, 2013
[18] Yang H, Yang B, Wei C F. The open experimental resources to serve payloads for international cooperation onboard space station[C]// Proceedings of Global Space Exploration Conference. Beijing: CSA, 2017
[19] 范唯唯, 韩淋, 杨帆, 等. 2018年国际空间站科研与应用进展[J]. 载人航天, 2019, 25(2): 271-276
Fan Weiwei, Han Lin, Yang Fan, et al. Review of scientific research and application on ISS in 2018[J]. Manned Spaceflight, 2019, 25(2): 271-276 (in Chinese)
[20] 范唯唯, 杨帆, 韩淋, 等. 国际空间站俄罗斯舱段20年主要科研活动及未来部署综述. 载人航天, 2018, 24(4): 553-560
Fan Weiwei, Yang Fan, Han Lin, et al. Review of 20 years research activities and future elements in Russian segment on ISS[J]. Manned Spaceflight, 2018, 24(4): 553-560 (in Chinese)
[21] 东华鹏, 王亚军, 安雪岩. 可重复使用空间站补给方案设想[J]. 宇航总体技术, 2018, 2(2): 22-26
Dong Huapeng, Wang Yajun, An Xueyan. The conception of reusable space station replenishment[J]. Astronautical Systems Engineering Technology, 2018, 2(2): 22-26 (in Chinese)
[22] 高铭, 赵光恒, 顾逸东. 我国空间站的空间科学与应用任务[J]. 中国科学院院刊, 2015, 30(6): 721-732
Gao Ming, Zhao Guangheng, Gu Yidong. Space science and application mission in China’s space station[J]. Bulletin of Chinese Academy of Sciences , 2015, 30(6): 721-732 (in Chinese)
[23] 苏怀朋, 赵振昊, 孙永进, 等. 载人空间站空间科学应用研究[J]. 宇航学报, 2014, 35(9): 985-991
Su Huaipeng, Zhao Zhenhao, Sun Yongjin, et al. Study on space science and technology of manned space station[J]. Journal of Astronautics, 2014, 35(9): 985-991 (in Chinese)
[24] 王天梦, 王华, 李海阳. 面向补给任务的空间站共轨飞行器部署研究[J]. 载人航天, 2017, 23(5): 582-596
Wang T M, Wang H, Li H Y. Research on location deployment of space station co-orbital spacecraft for refueling mission[J]. Manned Spaceflight, 2017, 23(5): 582-596 (in Chinese)
[25] 刘金国, 陈科利, 谢华龙. 空间站可充气展开舱外载荷原理样机结构设计与分析[J]. 载人航天, 2016,22(6): 737-743
Liu Jinguo, Chen Keli, Xie Halong. Preliminary design and analysis of space station inflatable deployable extravehicular payload prototype[J]. Manned Spaceflight, 2016, 22(6): 737-743 (in Chinese)
