一种通用的航天器在轨分离设计方法
2019-01-10盛瑞卿陈春亮邢卓异白崇延
盛瑞卿,陈春亮,邢卓异,白崇延
(北京空间飞行器总体设计部,北京 100094)
0 引 言
随着空间探测任务的多样化和复杂化,利用单个航天器实现多目标、多功能的空间探测任务已成为航天技术的重要发展趋势,尤其在载人航天和深空探测任务中,许多航天器需要执行在轨分离任务的同时还要求分离后多个舱段能够正常运行。如一个舱段继续在轨飞行,执行遥感或其它科学探测任务,另一舱段则进入大气或动力下降,完成着陆或巡视探测任务。
本文从航天器在轨分离时序设计的角度出发,重点考虑航天器在轨分离的可靠和安全。首先,要保证分离逻辑的可靠,从分离时序的角度出发即要明确分离后需要完成的任务,分析完成相应任务所需要工作的设备。确认完成后,保证可靠要解决的问题就是确保对应设备能够准确可靠地获取分离所触发的信号,由此引申出分离信号的可靠配置以及分离信号的可靠逻辑判断。
其次,为保证安全分离,避免两舱段在分离后启动运动姿态控制时发生碰撞,就需要设置合理的安全区域,确保在该安全区域中两舱段均不会进行姿态机动,以保证分离的安全。由于两舱段的分离速度取决于航天器所选用的弹簧分离装置特性,当弹簧分离装置相关指标明确后,也就确定了两舱段的分离速度。因此,分离安全中要求确定安全区域的问题也就可以转化为求解分离后两舱段停止姿态机动的时间,即停控时间。
本文从上述问题出发,从分离信号的选型、典型任务配置、分离逻辑可靠设计、分离安全数学建模及其仿真等方面,解决两舱段分离时序设计中的相关问题,确保航天器在轨安全、可靠实施分离。
1 航天器分离信号设计
1.1 航天器分离信号触发形式
分离信号是确认航天器在轨分离最直接、准确的手段[1]。目前,航天领域常用的分离信号包括以下3类:
1)分离电连接器接点短接:在两舱段间分离电连接器取一对接点,在连接器一侧短接,插接后形成回路。连接器分离后断开,可判断分离状态;
2)分离开关(行程开关):以按钮按压或释放的行程(距离)量,控制开关触点的通断或触点转换,从而实现电路的转接,保证分离信号的输出;
3)分离信号装置:通常在舱段分离端面安装分离开关受限的情况下,设计专用的分类信号装置,安装于舱段分离面的侧方,工作原理与连接器短接相似。
表1给出了几种分离信号的优缺点比较。
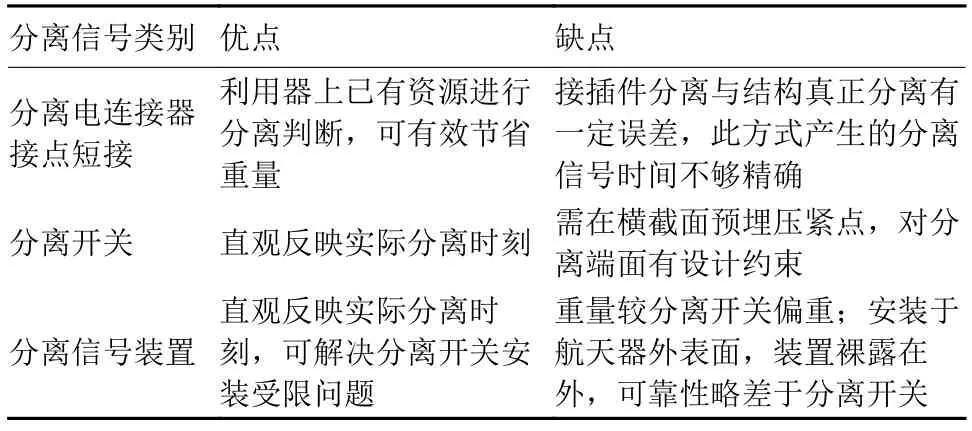
表1 分离信号类别优缺点对比Table 1 The comparison of advantages and disadvantages with the different separation signal
1.2 典型任务配置
假定某一在轨航天器通过在特定轨道实施分离形成舱段1和舱段2,分离后舱段1继续在轨探测、舱段2则再入大气。分离前由舱段1实施航天器的在轨姿态控制,分离完成后由于任务需要舱段1、舱段2则需分别实施姿态控制以完成后续在轨探测和再入大气的飞行任务。
要完成上述任务,首先舱段1和舱段2必须要有完成遥控指令接收处理和遥测参数采集发送功能的设备,用于根据分离信号启动器上程控指令的执行,如接通当前舱段的接地开关、切换热控工作模式等,称之为系统管理单元(System Management Unit,SMU)。其次,舱段1和舱段2必须配置有完成相应舱段后续巡视、再入任务的制导、导航控制装置,用于根据分离信号启动航天器的姿态控制,称之为制导导航控制器(Guidance Navigation Control Controller,GNCC)。即舱段1和舱段2均需配置系统管理单元(SMU)和制导导航控制器(GNCC)以保证后续任务的执行[4]。
对于两个舱段,均须真实反映在轨分离状态,因此必须配置机械分离信号,如分离开关或分离信号装置。为了确保任务的可靠性,配置多个机械分离信号进行冗余设计,是最为有效的一种手段。但由于目前航天器受重量限制的约束较为强烈,无法为每个舱段配置多个分离信号,以下仍从上述假设的具体任务出发,对两个舱段的具体分离信号配置进行分析。
对于舱段1的飞行设计,通常考虑在分离前由地面通知GNCC停止控制,实施分离操作,等待两航天器到达一定安全距离后,由GNCC自主启动姿态控制。鉴于上述设计的考虑如下:
1)若两舱段正常分离,则舱段1根据停控时间自主延时启动后续控制,对航天器安全性无影响;2)若两舱段未正常分离,为确保航天器在轨安全,需要舱段1能够自主启控,建立后续姿态,为故障处理预留时间。
鉴于上述分析,对于舱段1的GNCC设备而言,无须接收分离信号;仅需将分离信号引入SMU设备,用于地面遥测判读监视。
对于舱段2的飞行设计,通常考虑在分离前GNCC始终处于等待状态,直至确认分离后才允许其自主启动姿态控制。若舱段1和舱段2未分离,舱段2自主启控,会导致在同一时刻两个制导导航设备同时控制同一航天器,造成控制系统异常。因此,舱段2的GNCC必须配置分离信号。且由于舱段2后续需执行再入任务,其大气环境、测控条件等都会发生变化,因此需要SMU根据分离信号自主切换至系统相应的工作模式上。
鉴于上述分析,对于舱段2,GNCC和SMU均需引入分离信号,用于器上状态设置与姿态控制。
对于该典型任务,分离信号的精简配置为舱段1的SMU、舱段2的SMU以及舱段2的GNCC至少需配置一路表征准确机械分离的信号装置。考虑分离信号是触发后续程控的重要条件,为每个设备配置两路表征准确机械分离的信号装置是有效的冗余方式。但鉴于重量要求的约束,采用电分离信号短接与机械分离信号装置(分离开关或分离信号装置)相结合的方式则是兼顾重量与可靠性要求的合理配置。
因此,从可靠的角度出发,为该典型任务配置的分离信号如表2所示。其中,分离开关/分离信号装置的选择可依据舱段框面结构进行选择。

表2 分离信号典型任务配置Table 2 A typical task allocation of the separation signals
2 分离逻辑设计
在合理配置完各设备所须的分离信号后,则需要针对多个分离信号进行合理的逻辑判断,以最终正确表征分离。以下仍针对上述典型任务,给出各设备对应的分离判断逻辑。
对于舱段1中的SMU,共采集2路分离电连接器短接给出的信号和2路分离开关/分离信号装置给出的信号。其中,定义分离电连接器短接产生的信号为信号1-①、信号1-②,分离开关/分离信号装置给出的信号为信号1-③、信号1-④。舱段1的SMU分离逻辑判断公式为:
舱段1-SMU分离有效=(信号1-①||信号1-②)&(信号1-③||信号1-④)
即舱段1的SMU采集到任一电分离连接器产生的分离信号有效,且采集到任一机械分离信号有效时,才判定两舱段可靠分离。
对于舱段2中的两台设备,其中SMU共采集2路分离电连接器短接给出的信号和2路分离开关/分离信号装置给出的信号,同时接收舱段2中的GNCC转发的分离信号;GNCC共采集2路分离开关/分离信号装置给出的信号,同时接收舱段2中的SMU转发的分离信号。即SMU共接收5路分离信号,GNCC共接收4路分离信号。具体信号如表3所示。
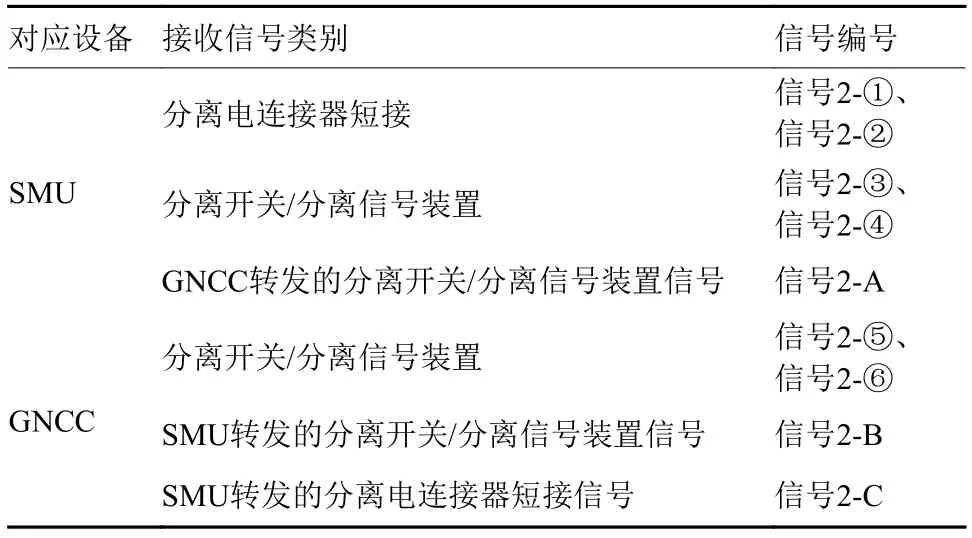
表3 舱段2设备接收分离信号汇总Table 3 The collection of the received separation signal with the facilityof module 2
其中,SMU接收到的GNCC转发信号2-A、GNCC接收到的SMU转发分离开关/分离信号装置信号2-B、GNCC接收到的SMU转发分离电连接器信号2-C分别定义如下:
信号2- A =信号2-⑤&信号2-⑥
信号2-B = 信号2-③&信号2-④
信号2-C = 信号2-①&信号2-②
即对于需要转发的信号,必须是采集到的两路信号均有效才能转发,以保证信号转发的正确性。
由表3可知,舱段2中的SMU和GNCC所接收到的信号均可划分为3类,因此,对于SMU和GNCC的逻辑判断准则即为3类信号中的任2类信号有效,即判定两舱段分离。其中,该类别中含有两路信号的只要有一路信号有效即认定该类信号有效。信号处理定义如下:
信号2-D = 信号2-① || 信号2-②
信号2-E = 信号2-③ || 信号2-④
信号2-F = 信号2-⑤ || 信号2-⑥
则舱段2中的SMU信号有效即为信号2-D、信号2-E、信号2-A3个信号进行“三取二”逻辑判断、GNCC信号有效即为信号2-F、信号2-B、信号2-C这3个信号进行“三取二”判断。
3 分离安全数学建模
为保证安全分离,避免两舱段在分离后启动运动姿态控制时发生碰撞,就需要设置合理的安全区域,确保在该安全区域中两舱段均不会进行姿态机动,以保证分离的安全。在两舱段的分离速度确定的前提下,分离安全的问题中要求确定安全区域的问题也就可以转化为求解分离后两舱段停止姿态机动的时间,即停控时间。
容易得到

分离后舱段1飞行速度

分离后舱段2飞行速度

由下列公式可以得出舱段1和舱段2分离后的轨道根数
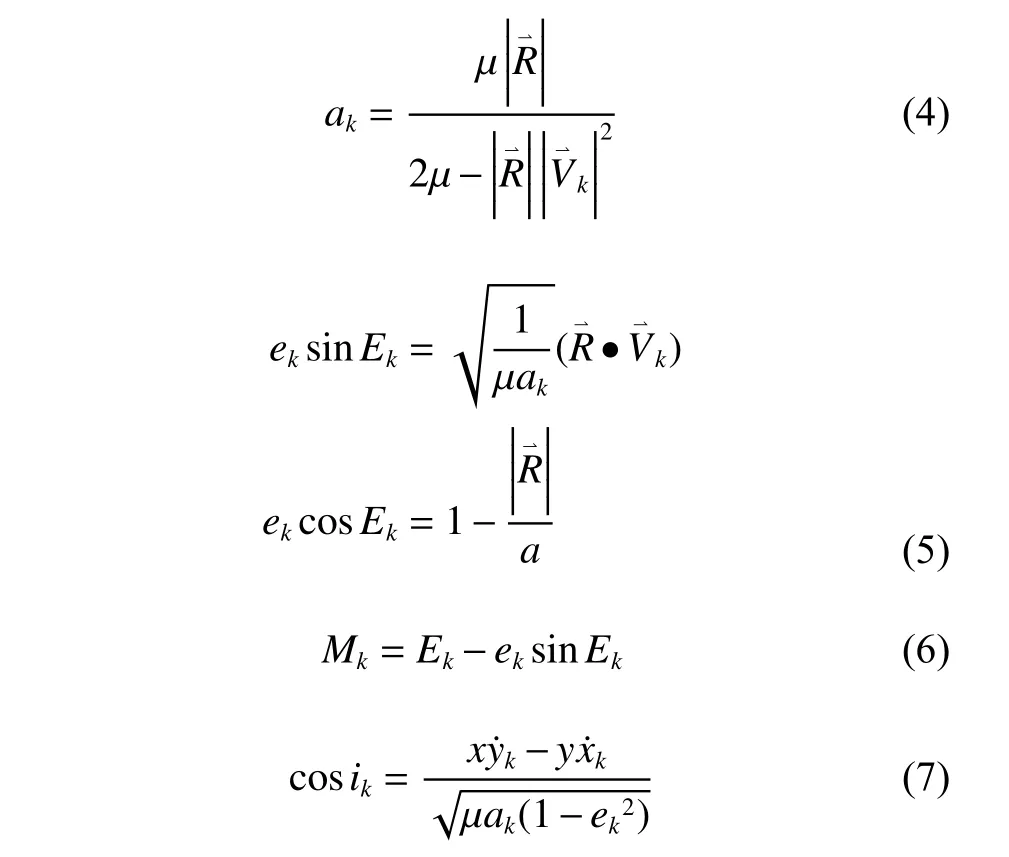
上述各式中,下标k=1、2,分别表示舱段1和舱段2对应的轨道根数。
舱段1和舱段2单独飞行∆t后,舱段1位置和舱段2位置可以由下列公式计算得到
上述各式中,下标k=1、2,分别表示舱段1和舱段2单独飞行∆t后对应的轨道根数和位置矢量。舱段1和舱段2单独飞行∆t后,舱段1和舱段2的相对距离变化

对于已知的舱段1和舱段2的质量、分离速度,可根据式(1)~(15),计算得到舱段1和舱段2相对距离随时间的变化曲线。

确保舱段2分离的安全性判据为:

分别根据公式(16)和公式(17),可以得到在合理安全距离下两舱段的单独飞行时间,即保证安全分离的停控时间。
4 仿真分析结果
设定某在轨航天器在月地转移轨道上距地高度约为6 000 km处实施分离,分离速度为0.6 m/s,分离速度方向与飞行速度方向垂直,分离后的两舱段的相对质量分别为M1=400 kg 、M2=1 200 kg,由式(1)~(15)可以计算得到两舱段相对距离随时间变化情况,如图1所示。
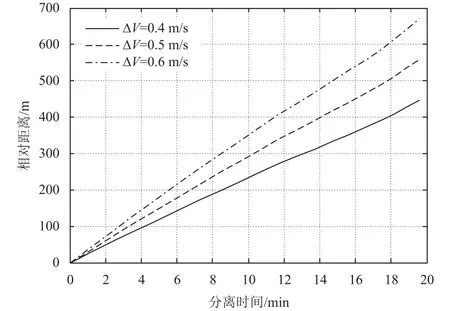
图1 分离后两舱段的相对距离变化(零时刻为分离时刻)Fig.1 The relative distance change (the zero time is the separation time)of two modules after separation
据图1,分离后3 s两舱段的相对距离为1.80 m,大于舱段1最大尺寸包络max(L1,W1,H1)=1.5 m的要求,舱段1可以启控;分离后4 s两舱段的相对距离为2.40 m,大于舱段2最大尺寸包络max(L2,W2,H2)=2.3 m的要求,舱段2可以启控。
5 结 论
本文以飞行时序设计为出发点,从保证分离信号可靠性的角度提出了一种典型的分离信号配置与通用的分离信号触发控制逻辑,从分离过程安全性的角度,建立了航天器在轨分离安全性数学模型,并开展了仿真分析。
该方法已成功应用于某一重大专项在轨飞行任务,确认了方法的可行性和正确性,可以作为后续航天任务的参考。