我国载人航天器飞行轨道设计
2022-02-20汤溢商帅陈伟跃张亚锋张治国
汤溢 商帅 陈伟跃 张亚锋 张治国
(北京空间飞行器总体设计部,北京 100094)
轨道设计贯穿于航天器设计的整个过程,被认为是航天器总体设计中非常重要的环节。轨道设计以满足工程任务为宗旨,综合考虑各大系统及航天器自身的约束条件,同时以资源消耗、控制精度等最优为目标[1]。我国载人航天器轨道设计经历了不同的发展阶段,每个阶段均由工程任务牵引,不断追求工程实现和技术进步性。我国载人航天有“三步走”的规划,载人航天器轨道设计也有相应的“三步走”发展历程。
第一步,单个载人航天器独立飞行。这个阶段从神舟一号载人飞船至神舟七号载人飞船。这一阶段轨道设计涵盖了单个载人航天器任务的全过程,从无到有。它不仅是后续轨道设计的基础,也与载人航天总体方案相互关联,发射场、着陆场的选址,测控站和测量船的配置,在轨飞行天数、发动机的选型,无一不与轨道设计息息相关。从当今轨道设计的水平和能力来看,也许会觉得这一阶段的轨道比较简单,然而正是这简单轨道设计参数,确定了我国近地载人航天器的初始轨道、运行轨道、返回轨道、救生轨道。同时,也确定了我国载人航天工程发射场、返回着陆场、测控网等的方案要点。
第二步,两个航天器交会对接飞行。这个阶段包括神舟八号至神舟十一号载人飞船、天舟一号货运飞船、天宫一号目标飞行器和天宫二号空间实验室。这一阶段的轨道设计由单个航天器到两个航天器相互配合,是一个巨大的跨越。其具体内容包括:主动航天器交会对接轨道设计、被动航天器调相轨道设计和离轨轨道设计。交会对接轨道采用远距离地面导引与近距离自主制导相结合,经过多次在轨验证,掌握了交会对接轨道技术。交会对接轨道设计除了轨道策略和算法更加复杂,重点考虑的要素是精度、推进剂、安全性。因为任务的需求不得不关注到飞行过程误差的各个环节,包括火箭发射入轨轨道偏差、轨道控制偏差、测定轨偏差等,同时也促进了各大系统性能的提升。
第三步,空间站阶段多航天器飞行。空间站任务以来,轨道飞行有2个方面的主要变化:①载人航天器飞行时间更长,类型和数量更多,任务关联度更高;②交会对接、返回等成为一种常态化的任务,为了提高任务效率,逐步提升航天器轨道控制自主化程度,交会对接轨道发展到全程自主完成,缩短了时间,提高了精度。这一阶段轨道设计经历了从确保任务成功到技术水平突飞猛进的发展过程。
本文按我国载人航天器轨道发展阶段,分别介绍了第一步至第三步轨道设计,并对我国载人航天器轨道设计发展进行总结,对未来的发展方向提出展望。
1 单个载人航天器轨道设计
1.1 运行轨道设计
1.1.1 运行轨道确定
单个航天器的运行轨道设计,首先要确定轨道六根数,而其中最重要的参数就是轨道半长轴(轨道高度)。近地载人航天器的轨道高度通常在340~420 km,这个高度既在运载火箭的能力范围内,又可开展长期飞行任务。在我国最初的载人航天器轨道设计中,已经考虑到未来载人空间站长期飞行轨道高度选择在400 km左右,而早期载人航天器飞行时间较短,可选择在相对较低的轨道上,经过充分验证后再提升轨道高度。当时,我国发射场主要有酒泉、西昌、太原,选择发射近地卫星的酒泉发射场作为载人飞船的发射场;主要测控支持手段为地面测控站,而没有中继卫星。结合酒泉发射场位置、当时我国地面测控站条件,以及轨道回归性要求,最终选定我国载人航天器最初运行轨道为高度约343 km、倾角42°~43°的圆轨道的2天回归轨道。运行轨道初步确定后,根据运行轨道轨迹及31个轨道周期(约2天)的回归性条件,结合我国地形情况,选定内蒙古为载人飞船主着陆场。载人飞船在轨飞行的第15圈(第1天)、第46圈(第3天)、第77圈(第5天)轨道星下点重复,均可过主着陆场中心点。
1.1.2 初始轨道及轨道圆化
运载火箭发射神舟载人飞船入轨初始轨道并不是直接到达运行轨道,而是一个椭圆轨道。将初始轨道远地点高度设计为运行轨道高度,直接采用一次机动可实现圆化轨道,如图1所示。
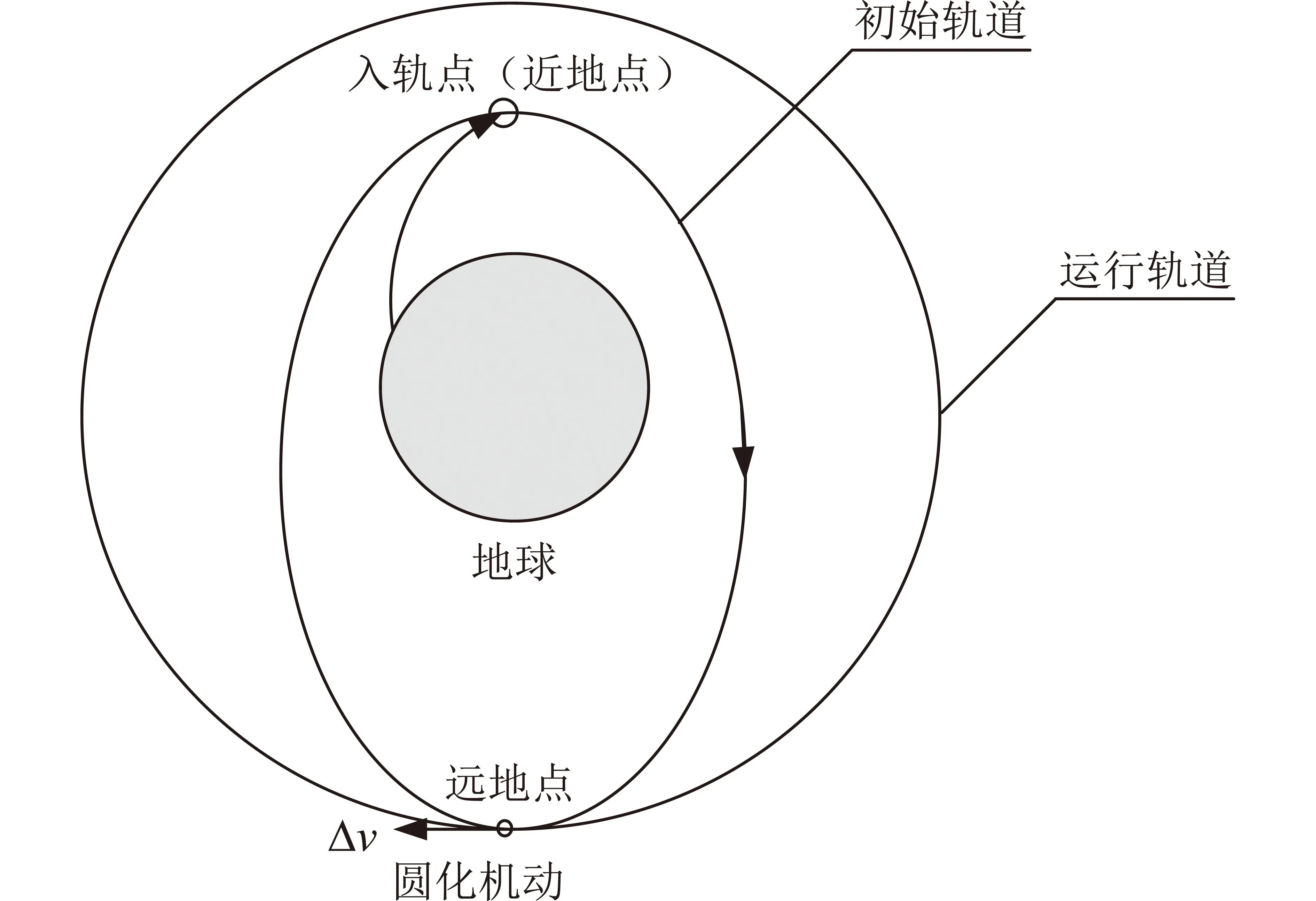
注:Δv为变轨速度增量。图1 初始轨道及圆化轨道机动设计示意Fig.1 Design of initial orbit and rounding orbital maneuver
1.1.3 轨道维持
神舟一号至神舟七号载人飞船飞行时间较短,最长不超过7天,期间轨道高度衰减较少。但是,由于入轨误差、圆化变轨误差以及在轨飞行期间轨道衰减的影响,外推到飞船返回圈的升交点经度、轨道高度等参数有可能超出返回控制要求。因此,在轨飞行期间,需视情调整轨道高度,开展轨道维持。
1.2 返回轨道设计
1.2.1 正常返回轨道设计
载人航天器的再入方式,按升阻比与轨道特性划分,可包括弹道式、弹道-升力式(半弹道式)、升力式3类。我国神舟载人飞船返回主方案采用弹道-升力式(半弹道式)返回,弹道式返回为备份方案。半弹道式返回可进行主动姿态控制,飞行时间较长、过载较小、落点更精。
早期半弹道式返回轨道设计采用的是经典的标称弹道法,在设计阶段根据返回任务条件离线设计一条满足工程约束的标称弹道及其对应的制导控制算法,将相关参数和模型装订在航天器上。在飞行任务中,返回前进行轨道调整,减小实际返回轨道条件与设计的返回飞行轨道条件的差异,同时调整再入控制参数,利用对标称返回轨道的跟踪控制,实现对实际飞行条件下各项偏差的适应。
1.2.2 应急返回轨道设计
对于弹道式返回,其设计集成了简单、快速、可靠等优点,计算简单,轨道条件适应范围较广,是应对各类故障快速有效的返回方式,可以实现全自主返回,是确保安全的一道重要屏障。因此,弹道式返回可以作为正常半弹道式返回的补充,在应对各种应急返回时发挥作用。例如:入轨初期故障情况下的第2圈返回,加速度计故障或者导航数据错误导致的弹道式返回,在轨运行段遭遇失火、失压等紧急重大故障情况下自主应急返回。
应急情况下的弹道式返回采用部分返回参数可调的固化飞行程序。通过大量的仿真计算对固化飞行程序中的关键参数进行设计,使得目前的载人飞船弹道式返回轨道方案可以适应的轨道高度范围为180~460 km,完全覆盖了空间站任务长期运营的要求。
应对失火、失压等重大紧急故障的自主应急返回,可以由地面根据精密定轨和轨道预报,对未来可用的自主应急返回落区和相关返回参数进行预报计算,通过天地通信链路注入给载人飞船更新数据,确保载人飞船能够以尽可能高的精度实施自主应急返回。同时,载人飞船也具备了在轨自主定轨、预报轨道并计算返回参数的能力。计算返回参数采用经过神经网络训练得到的简化模型,在目前载人飞船的计算能力下,也仅需几秒的时间就可以获得计算结果。
自主应急返回在全球范围内分布了十余个可选的落区。落区的选择与确定,考虑了载人飞船在任意时刻发生故障时都能确保及时返回可用落区。因此,载人飞船具备了发生紧急重大故障情况下4 h左右返回地面的能力。
此外,为了应对主份发动机故障和制导导航与控制(GNC)某些设备故障的情况,提升航天员在轨安全性,载人飞船还设计了多种故障情况下的应急返回方案,包括了用8台大姿态控制发动机制动返回、手控半自动返回等。
1.3 救生轨道设计
载人航天任务需要将航天员的生命安全放在首位,轨道设计也贯穿这一原则。在发射段设计了救生轨道,确保在运载火箭故障情况下通过载人飞船自身能力完成救生任务,确保航天员安全着陆。根据长征2F运载火箭系统的弹道特点,针对不同弹道条件设计了发射段8种应急救生模式,即救生模式I至救生模式VIII。其中:救生模式I至救生模式IV为大气层内救生,救生模式V至救生模式VIII为大气层外救生模式。
运载火箭未完成发射任务、航天器从发射弹道上返回地球通常属于亚轨道返回的范畴,其特点是航天器运行速度未达到第一宇宙速度,轨道寿命较短,返回再入过载较大,需要综合利用火箭逃逸发动机、飞船变轨发动机与返回再入控制手段实现亚轨道返回,同时满足再入过载、开伞点动压等条件。
其中,在救生模式I状态下,当飞船系统收到逃逸指令后,飞船根据导航参数实施轨道计算、实时确定返回舱从逃逸塔分离的时刻,从而有效地满足了救生模式I情况下返回舱的开伞条件。在发射段大气层外救生模式VI的状态下,利用飞船变轨发动机的推力进行返回舱的落点调整,使返回舱溅落在总长度仅为2200 km的3个海上救生区,从而大大减少海上救生用搜救船队的数量,满足了搜救时间的要求。这个方案称作海上定区溅落方案,其飞行过程如图2所示。
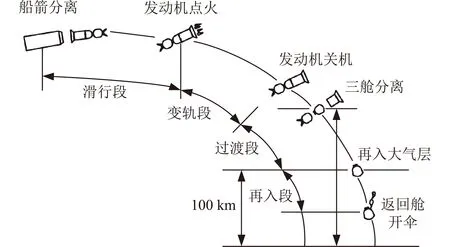
图2 海上定区溅落方案飞行过程示意Fig.2 Flight process sketch of splash down plan of fixed region on sea
2 两个航天器交会对接任务轨道设计
2.1 被动航天器调相轨道设计
在交会对接任务中,空间实验室或空间站等被动航天器先发射入轨,为了给主动航天器交会对接创造更好的轨道条件,在主动航天器发射前进行调相轨道控制,保持一定的轨道条件并停止控制。调相终端条件最主要是轨道相位,同时需要满足一定的轨道高度、偏心率等要求。调整相位最直接的方法是改变被动航天器轨道角速度。根据开普勒定律,轨道高度与轨道角速度成反比,因此调相控制主要通过在合适时机对被动航天器施加一定速度增量改变其轨道高度来实现。
根据轨道相位φ与轨道角速度ω和运行时间t的关系,即φ=ωt+φ0(φ0为初始轨道相位),微分后可以得到Δφ=Δω·t+ω·Δt,因此,相位的调整是航天器轨道角速度与调相时间累积的过程[2]。对于相同的相位调整需求,调相机动越早,累积时间越长,轨道机动量越小,可节省推进剂消耗。但是,由于速度增量、空间环境预报等各类误差对相位的影响也会随时间累积而变大。综合考虑我国载人航天器各方面误差水平、精度要求及调相机动大小,一般考虑在主动航天器发射前20天左右进行第1次调相机动,根据实际误差情况,在主动航天器发射前1周左右视情进行1~3次修正机动,满足轨道相位、高度、偏心率等调相终端精度要求。
为主动航天器交会对接进行调相时,可规划的自变量包括调相时刻t1,t2,…,tn及其所对应的速度增量Δv1,Δv2,…,Δvn(n为变轨次数),即X=[Δv1Δv2… Δvnt1t2…tn];规划目标为Y=[φae],其中,a为轨道高度,e为轨道偏心率。策略计算过程中,首先瞄准目标相位φ进行首轮策略计算,1次规划时至少有2个自变量Δv1和t1,可获得多重解。多重解中满足其他2个目标a,e范围要求的可称为有效解。策略实施时,从有效解中优先选择每次变轨速度增量Δv为正值(称为最优解),可以将调相控制与轨道维持相结合,进行升轨调相,节省推进剂消耗。
在上述条件无法满足时,可考虑决策调整发射日期来调整规划目标。我国载人航天器工程轨道高度为343 km或393 km,相位具有近似2天或3天回归特性,每调整1天发射窗口,相位变化约180°或120°。
2.2 主动航天器交会对接轨道设计
在早期的交会对接活动中,美国和苏联沿着2种不同的方向开展交会对接技术研究。美国倾向于航天员参与交会对接,它要求航天器机动性能较高,系统的冗余度和复杂性较高,整个系统需要根据每项具体的任务进行专门的训练和规划[3]。苏联采用自动交会对接,只需要工作人员在地面进行操作和监控,虽然开发成本很高,但由于采用了标准化方案使得整个系统可靠性高,因此在重复使用的过程中效果更好[4]。
20世纪80年代开始,人类的交会对接活动进入应用阶段。到20世纪90年代末期,美国和苏联(俄罗斯)改进了原有系统,并继续分别沿着有人参与和自动交会对接的方式开展空间任务。这个阶段执行交会对接任务最具有代表性的航天器分别是美国的航天飞机,以及俄罗斯的联盟号载人飞船和进步号货运飞船。我国这一阶段的交会对接方案充分借鉴了美国和苏联(俄罗斯)早期的经验,轨道设计采用远距离地面导引和近距离自主制导相结合的方案,最后平移靠拢段采用自动和人控相互备份2种手段。
在远距离导引阶段,2个航天器相对距离较远,采用绝对定轨方式,由地面对2个航天器进行轨道测定,计算轨道控制策略,生成轨道控制参数并注入至主动航天器执行轨道控制。这一系列工作需要2次轨道控制间隔3~5圈,主动航天器通过几次轨道机动提升轨道高度,缩短相对距离,同时消除两个航天器轨道面偏差,在确定时刻到达远距离导引转自主控制点,满足相对位置速度要求。之后,两个航天器交会转入自主控制段,采用相对制导导航控制直至对接,整个交会对接任务在2天左右完成[5]。轨道机动可分解为轨道面内机动和轨道面修正机动。
(1)轨道面内机动控制方案。主动航天器初始轨道为椭圆轨道,转入自主控制段轨道为圆轨道,为满足轨道高度、偏心率、相位要求,同时为了节省推进剂,在轨道特征点(近地点或远地点)施加轨道机动。最终确定施加3次轨道面内机动,满足轨道面内轨道控制要求,如图3所示。
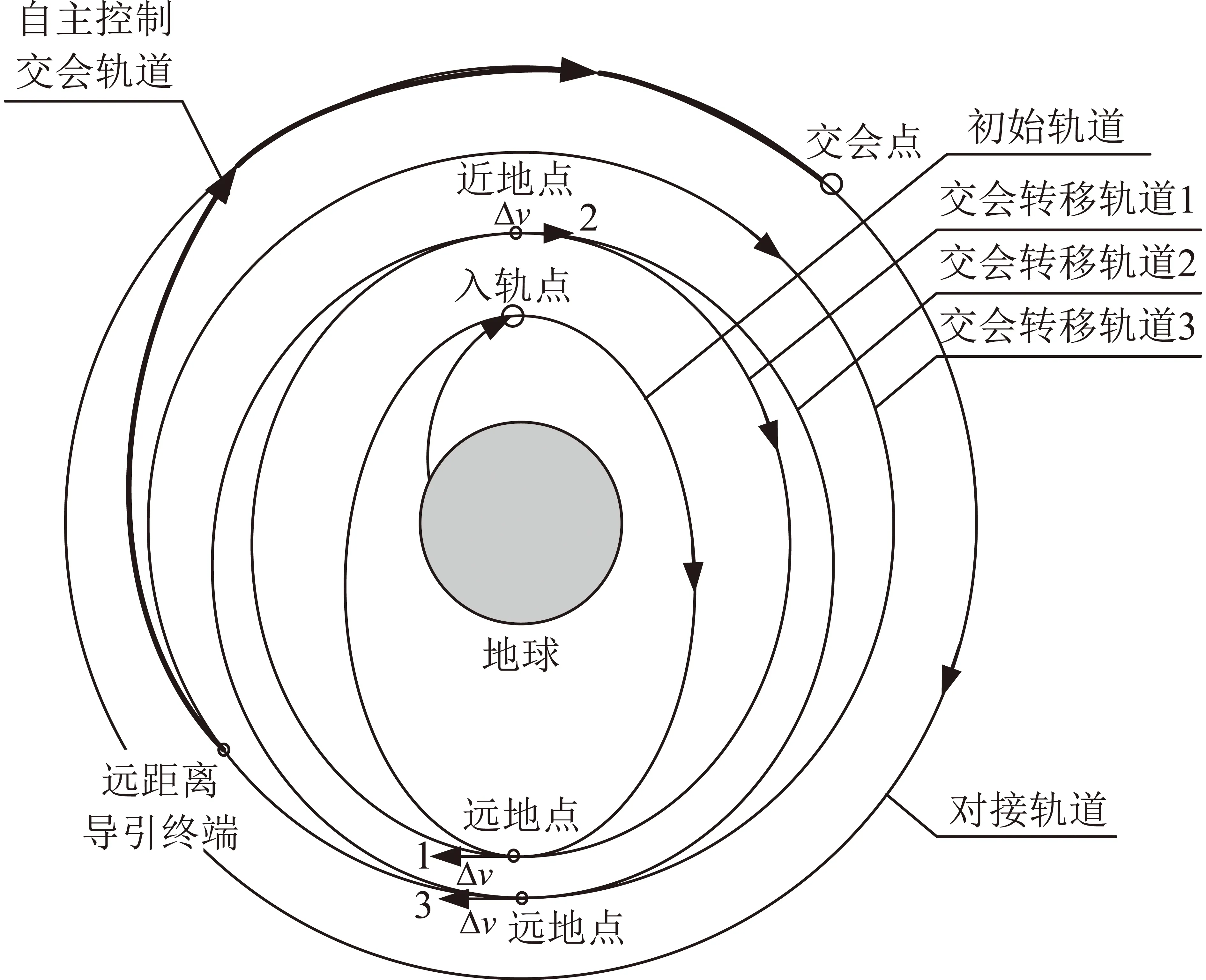
注:单独数字1,2,3表示第1次、第2次和第3次变轨。图3 调相轨道面内机动示意Fig.3 Rendezvous maneuver of phasing in orbital plane
(2)轨道面修正机动。轨道面修正的主要目的是修正主动航天器与被动航天器的初始轨道面偏差,满足自主控制段起点轨道与被动航天器共面精度要求。轨道面偏差包括轨道倾角偏差和升交点赤经偏差。为节省推进剂,采用1次组合轨道机动进行2个偏差要素的联合修正。机动执行点为实际轨道和目标轨道的轨道面交点,在机动点施加机动速度矢量,使机动后速度方向沿目标轨道,如图4所示。变轨速度增量为
(1)
式中:h为轨道动量矩;r为轨道半径;Δi为轨道倾角修正量;ΔΩ为升交点赤经修正量;i0为目标轨道倾角。
2个节点的位置(纬度幅角)分别为u1=arctan(ΔΩsini0/Δi)和u2=π+arctan(ΔΩsini0/Δi)。
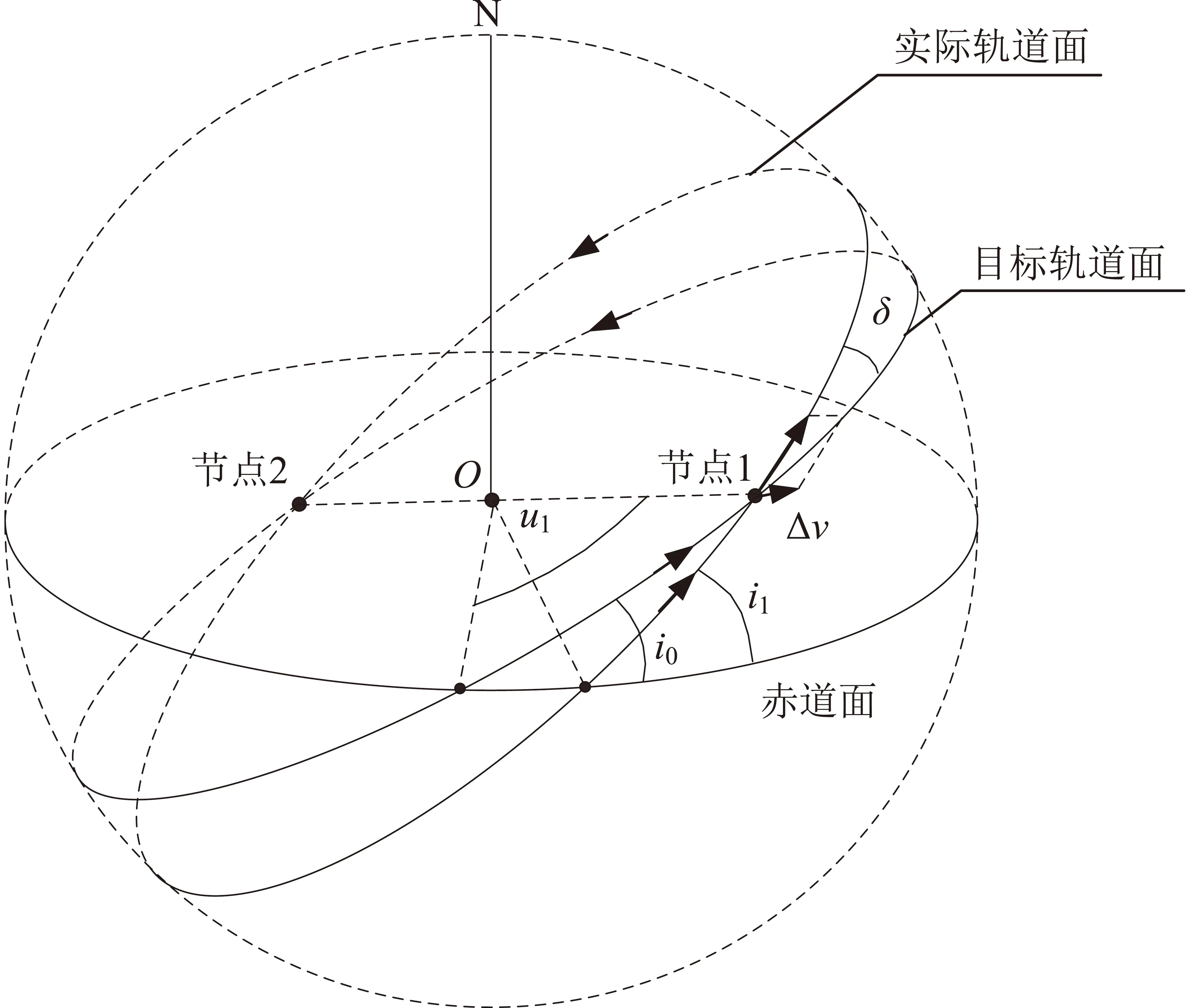
注:δ为目标轨道面和实际轨道面夹角;i1为实际轨道倾角;N为北极。图4 调相轨道面偏差修正示意Fig.4 Correction of error of orbital plane in phasing
(3)组合修正机动。在完成轨道面内机动和轨道面修正机动后,考虑各次机动测定轨偏差、发动机执行偏差,设计1次组合修正机动,消除以上轨道机动偏差,提高控制精度,满足终端条件要求。组合修正的理论机动点与轨道面机动点相同,在轨道面修正的基础上增加对机动后速度控制。如果实际轨道测定结果已满足终端控制要求,可不实施组合修正机动。
交会对接轨道对控制精度要求较高,在轨道设计过程中重点开展了误差源和误差敏感度研究。交会飞行的轨道控制与其他工程控制系统基本一致,形成控制回路的3个部分为测量、控制计算和执行,首次测量为初始状态,之后测量执行后状态,见图5。误差因素可根据控制环节,分为初始状态偏差、测量误差、控制计算误差、执行误差4类。
图5 交会轨道控制系统结构Fig.5 Construction of control system in rendezvous orbit
初始状态误差为运载火箭发射飞船入轨误差。入轨误差会影响轨道控制精度,同时入轨误差中的轨道面外误差对推进剂需求也较高。运载火箭改进了制导方案,大幅提升了入轨精度。测量误差是指轨道测定误差,之前的轨道测定主要采用地面站,为了提高轨道测定精度,逐步采用全球导航卫星系统(GNSS)、中继卫星等定轨数据,提高了定轨精度,缩短了定轨时间。控制计算误差主要由计算模型、计算算法、计算精度等因素产生。地面制导方案通过采用高精度模型、计算算法和高性能计算机,减少这部分误差。执行误差主要指发动机变轨误差,为减少控制误差,创新地提出了不同发动机联合变轨策略,综合减少了加速度计和尾推力误差导致的速度增量关机误差。
2.3 离轨轨道设计
货运飞船、空间实验室及空间站在任务结束后或寿命末期,为避免成为永久的空间碎片,对其他航天器的空间安全造成威胁,均需要进行离轨再入。再入后,航天器的绝大部分器件在大气层内被烧蚀销毁,少量残骸落入无人的安全区域。这些航天器的离轨轨道采用2次轨道机动,从高度340~400 km的运行轨道降低到近地点高度90 km以下的椭圆轨道,随后进入下降轨道,再入稠密大气层。为降低烧蚀残骸坠落对地面造成的风险,坠落区域选择在南太平洋区域。
3 空间站阶段多个航天器轨道设计
3.1 空间站联合调相轨道设计
空间站任务阶段,空间站(核心舱)作为交会对接被动飞行器,需要配合货运飞船、载人飞船及问天实验舱、梦天实验舱交会对接,不同航天器交会对接任务需求不完全相同,且航天器发射时间有一定关联性,尤其在关键技术验证和建造阶段,为了给主动航天器创造更好的条件,空间站调相轨道需要更精细化设计。根据任务需要,当2个主动航天器发射间隔较近(小于1个月时),若分别单独规划2次调相任务,第2次调相可能无法获得最优解。因此,需要采用联合规划调相策略,以获得综合最优解[6-7]。
联合规划时自变量为
(2)
目标为
Y′=[φ1a1e1i1φ2a2e2i2]
(3)
式中:下标1和2分别表示第1次调相目标和第2次调相目标。
本文方法已在空间站关键技术验证和建造阶段调相任务中实施,获得了良好效果。
3.2 自主交会对接轨道设计
人类航天活动进入21世纪,交会对接的概念已不仅要求主动航天器是一个由航天员驾驶的大型飞船,或者不再依赖大型可协作目标的自动导航系统进行近距离导引。尤其航天测控能力、运载能力和自动对接系统可靠性的提高,大大降低了自主快速交会对接技术的难度。已经实施的无人自主交会对接试验包括工程测试卫星(ETS)、试验卫星系统(XSS)、自主交会技术验证(DART)计划及轨道快车计划等[8]。载人航天方面,“国际空间站”(ISS)极大地促进了交会对接技术的发展,带动了除美国、俄罗斯以外乃至欧洲、日本在该领域的发展,如ESA的自动转移飞行器(ATV)货运飞船、日本的H-2转移飞行器(HTV)货运飞船等[9]。快速交会对接不仅缩短了航天员在狭小船舱内的等待时间,还减少了航天员独立飞行的风险,提高了安全系数。同时,有利于把时间敏感性的载荷和物资及时运送到空间站上,这对上行运输保存时间短的生物材料是十分重要的[10]。
自2012年开始,俄罗斯首次尝试在进步M-16M货运飞船发射后6 h与ISS对接(以往需2天时间),并将该快速交会对接飞行模式首次用于载人飞船(联盟TMA-08M)向ISS的交会对接,大大地缩短了交会对接的任务周期[11]。俄罗斯从2018年发射进步MS-09货运飞船开始至2019年发射进步MS-12货运飞船,将快速交会对接时间逐渐缩短至3 h40 min甚至3 h19 min,这一新的超快速对接模式比此前约6 h、绕地球4圈的快速对接模式缩短了近1/2时间,创造了ISS与造访航天器交会对接时间最短纪录[12]。在我国空间站任务阶段,交会对接任务频次增多,成为一种常规任务,也逐步开始尝试自主快速交会对接方案,提升交会对接任务的效率,减少对地面人员的依赖。2017年年底,我国的天舟一号货运飞船在轨飞行期间进行了6.5 h的快速交会对接试验。天舟二号至天舟四号货运飞船和神舟十二号至神舟十五号载人飞船,均采用6.5 h自主快速交会对接方案。
如第2.2节所述,在两个航天器交会对接任务阶段,交会远距离导引段采用地面制导与控制方式,2次轨道控制间隔3~5圈。在航天器自主轨道控制策略中,轨道确定、轨道外推、轨道控制参数计算完全由航天器上的计算机自主计算,计算时间不超过10 min,2次变轨间隔可缩短为0.5 h,交会对接可缩短为6.5 h,因此也被称作快速交会对接。自主交会对接技术的进步,让航天员在1天之内即可从相对狭小的载人飞船进入到宽敞舒适的空间站,飞行体验感大大提升。同时,地面支持人员的紧张任务时间和工作量也大大减少。
采用自主交会对接方案的前提条件,是在两个航天器交会对接任务中积累了大量的经验和数据,例如:交会对接轨道算法逐步成熟优化,经过两个航天器交会对接任务大量地面仿真和在轨实际飞行经验,交会对接轨道控制算法经过考验,可稳定计算出可行解,航天器上计算机具备自主计算能力;交会对接各个环节误差因素的影响范围和敏感度经过充分评估和大量仿真,确保自主交会对接方案可满足交会对接任务要求。图6为自主交会对接方案示例。
图6 自主交会对接方案Fig.6 Scheme of autonomous rendezvous and docking
天舟五号货运飞船在此基础上优化了交会对接控制制导策略,采用综合变轨,压缩了远距离变轨次数和时间;减少近距离自主控制段停泊点,加快了接近速度,实现了2 h自主超快交会对接,创造了世界纪录。
3.3 返回轨道设计优化
空间站任务阶段,载人飞船长期停靠。考虑应急情况,每天均有返回需求,而空间站作为大型航天器,为返回进行轨道调整将不再是主要的设计思路,因此对载人飞船返回轨道设计提出了更高的要求,需要适应轨道高度变化的应用场景。
根据再入航程设计思想,采用动态规划的方式设计返回轨道,允许运行轨道高度在一定范围内变化,根据返回前的实际轨道条件动态优化设计标称返回轨道,并进行控制模型及参数的仿真检验。在飞行任务中采用预测矫正制导方式,动态调整被跟踪的标称弹道,并对标称弹道进行跟踪控制。目前,载人飞船采用的动态规划返回轨道规划-预测矫正制导方式是较为先进的返回轨道设计与再入控制体系,飞船可适应运行轨道高度200~420 km的返回,不需要空间站配合进行飞船分离前的轨道调整。同时,动态规划-预测矫正的制导方式,提升了飞船自主运行能力和控制精度,减少了地面大量仿真工作。
4 结束语
随着载人航天任务的发展,载人航天器轨道设计的内容不断扩展,技术水平不断提升。从最初的单个航天器发射至返回的全寿命轨道,发展为两个航天器、多个航天器多任务的轨道;从主要依赖地面制导、发展为逐步采用自主制导,缩短任务时间,提高任务精度和灵活性。因此,提升了整个载人航天任务的技术水平,促进各大系统性能指标的提高。载人空间站工程进入运营阶段,轨道设计需要适应长期多变的空间环境,使用电推进作为轨道控制的重要手段,未来载人航天器轨道设计将针对新的任务特点,更大限度研究采用航天器自主的方式,优化使用推进剂等在轨资源,提高任务效率。
参考文献(References)
[1] 戚发轫.载人航天器技术[M].2版.北京:国防工业出版社,2003:13-34
Qi Faren. Manned spacecraft technology [M]. 2nd ed. Beijing: National Defence Industry Press, 2003: 13-34 (in Chinese)
[2] 林鲲鹏.空间站长期运营总体任务规划与仿真方法[D].长沙.国防科学技术大学,2014
Lin Kunpeng.Overall mission planning and simulation approaches for space station long-duration operations [D]. Changsha: National University of Defense Technology, 2014 (in Chinese)
[3] 朱仁璋,汤溢,李颐黎,等.航天器交会飞行设计方法研究[J].中国空间科学技术,2006,26(1):9-12
Zhu Renzhang, Tang Yi, Li Yili, et al.The overall design method of spacecraft rendezvous [J]. Chinese Space Science and Technology, 2006, 26(1): 9-12 (in Chinese)
[4] Goodman J L. History of space shuttle rendezvous and proximity operations [J]. Journal of Spacecraft and Rockets, 2006, 43(5): 944-959
[5] 林来兴.空间交会对接技术[M].北京:国防工业出版社,1995:1-5
Lin Laixing. Space rendezvous and docking technology [M]. Beijing: National Defence Insustry Press, 1995: 1-5 (in Chinese)
[6] 李革非,宋军,谢剑锋.组合体与飞船联合轨道维持[J].宇航学报,2013,34(12):1584-1590
Li Gefei, Song Jun, Xie Jianfeng. The complex’s and the spacecraft’s united orbit maintenances [J]. Journal of Astronautics, 2013, 34(12): 1584-1590 (in Chinese)
[7] 沈红新,周英,李海阳.轨道维持与调相的综合优化策略研究[J].空间控制技术与应用,2009,35(4):61-64
Shen Hongxin, Zhou Ying, Li Haiyang. Study on combined optimal strategy for orbit keeping and phasing [J]. Aerospace Control and Application, 2009, 35(4): 61-64 (in Chinese)
[8] 解永春,胡勇.空间交会策略回顾及自主快速交会方案研究[J].空间控制技术与应用,2014,40(4):1-8
Xie Yongchun, Hu Yong. Reviews of space rendezvous strategy and short rendezvous profile design for autonomous spacecraft [J]. Aerospace Control and Application, 2014, 40(4): 1-8 (in Chinese)
[9] 张雪松.细说人类载人航天的快速交会对接史[J].卫星与网络,2017(9):62-65
Zhang Xuesong. The history of manned space fast rendezvous and docking [J]. Satellite & Network, 2017(9): 62-65 (in Chinese)
[10] 巩庆海,宋征宇,吕新广.快速交会对接若干关键技术问题研究[J].航天控制,2014,32(6):16-21
Gong Qinghai, Song Zhengyu, LV Xinguang. Study on several key technical problems of fast rendezvous and docking [J]. Aerospace Control, 2014, 32(6): 16-21 (in Chinese)
[11] 佚名.俄罗斯货运飞船首次测试快速对接模式[J].载人航天,2012,18(5):37
Yi Ming.The first time experiment of Russian cargo spacecraft fast docking [J]. Manned Spaceflight, 2012, 18(5): 37 (in Chinese)
[12] 安德华,王永生.俄罗斯载人飞船“快速对接”飞行模式浅析[J].国际太空,2014(6):38-41
An Dehua, Wang Yongsheng. The simple analysis of the flight mode of Russian manned spacecraft “fast docking” [J]. Space International, 2014(6): 38-41 (in Chinese)
