基于BP 神经网络的智能车辆换道决策模型研究
2022-02-20殷时蓉罗天洪郑讯佳
陈 力,殷时蓉,罗天洪,郑讯佳,3,4
(1.重庆交通大学机电与车辆工程学院,重庆400041;2.重庆文理学院智能制造工程学院,重庆402160;3.汽车噪声振动和安全技术国家重点实验室,重庆,401122;4.中国汽车工程研究院股份有限公司,重庆401122)
车辆换道和跟驰是交通微观流系统中最常见的交通行为,是驾驶员在交通系统中结合驾驶经验和周围道路环境做出的综合判断。相比跟驰行为,换道行为更加复杂,仅仅依靠驾驶员主观思维建立换道决策模型不能全面、准确地反映车辆的换道行为。通过提取车辆周围信息建立换道决策模型能够客观反映车辆换道行为,同时也为无人驾驶汽车的换道决策提供理论基础。
近年来,国内外许多学者对车辆换道进行了大量研究。陈亮等建立了一种基于Multi-class SVM 的车辆换道识别模型,该模型采用粒子群优化算法标定SVM 中的惩罚参数和核参数,通过训练样本数据证明该模型能较好地达到换道识别目的。赵树恩等运用贝叶斯网络理论建立了车辆换道决策模型,通过仿真以及NGSIM 实测数据对比,其模型预测精度能够满足换道决策精度要求。YU Yuewen 等基于玩家动态博弈理论建立了车辆换道决策模型,该模型考虑换道车辆与目标车道车辆的博弈行为,进一步提出基于混合分割方法的多玩家博弈纳什均衡解的算法,获得换道目标的最优策略。SUH 等针对自动驾驶换道的复杂性提出了概率预测和确定性预测相结合的变道运动规划方法。在影响车辆换道参数的研究中,CHEN Chen等和ZHENG Zuduo 等提出了以换道车辆与原车道前方车辆、目标车道前方车辆、目标车道后方车辆间距作为影响车辆换道的影响参数。王俊彦等在考虑换道车辆与周围车辆间距的基础上提出包含车辆速度和加速度的换道影响参数,因其使用参数较多造成模型的训练速度较低,决策模型的精度不高。从现有的研究中得出:换道决策模型训练参数正确的选择和模型的复杂程度是制约车辆决策模型在车辆主动安全系统中应用的关键因素。
在复杂动态的交通环境中,智能汽车需要根据车载设备实时监测目标车辆周围的车辆信息和自身行车状态,选择合适的算法处理复杂的车辆信息对决策系统很关键。BP 神经网络是人工神经网络最基础、最成熟的一种网络,能够处理大规模数据和非线性问题,而且能够及时处理输出结果误差。本文综合考虑道路交通数据的复杂程度以及非线性关系,采用BP神经网络建立包含7个参数车辆换道预测模型,以HighD 自然驾驶数据集为数据基础提取换道时目标车辆特征参数。
1 换道行为分析
1.1 车辆换道过程
车辆换道是以驾驶员不满当前道路状况或者以自身期望为目的的一种驾驶行为,车辆换道过程如图1 所示,换道车辆不满当前道路行驶条件做出换道决策。一次完整的换道过程包括3 部分:换道意图产生、换道执行过程、换道结束,最终车辆到达目标车道超越前车。

图1 车辆换道示意图
判断车辆是否换道成功可由式(1)确定:

式中:L为车辆在时刻所在的车道编号;L+ 1为车辆在+1换道结束时刻所在的车道编号。
由于换道时车辆在短时间内连续换道会影响模型的预测准确度,本研究仅考虑车辆向左右邻车道的单次换道行为。
1.2 换道决策行为
在对车辆换道过程分析的基础上,基于实际道路交通车辆情况分析车辆换道决策行为。车辆换道决策行为如图2所示,当换道车辆未能达到驾驶员预期或者前车出现制动动作时,驾驶员首先会判断自车与前车的距离,当安全车距较小时驾驶员选择紧急制动增大安全距离。当达到合适安全距离时驾驶员通过判断邻道车辆运动信息,以及自车与邻道前车和后车间距,确定是否满足换道的要求,如果满足要求驾驶员执行换道动作,如果不符合换道要求,驾驶员选择减速使目标车辆与前车保持安全距离,在满足条件之后执行换道动作。
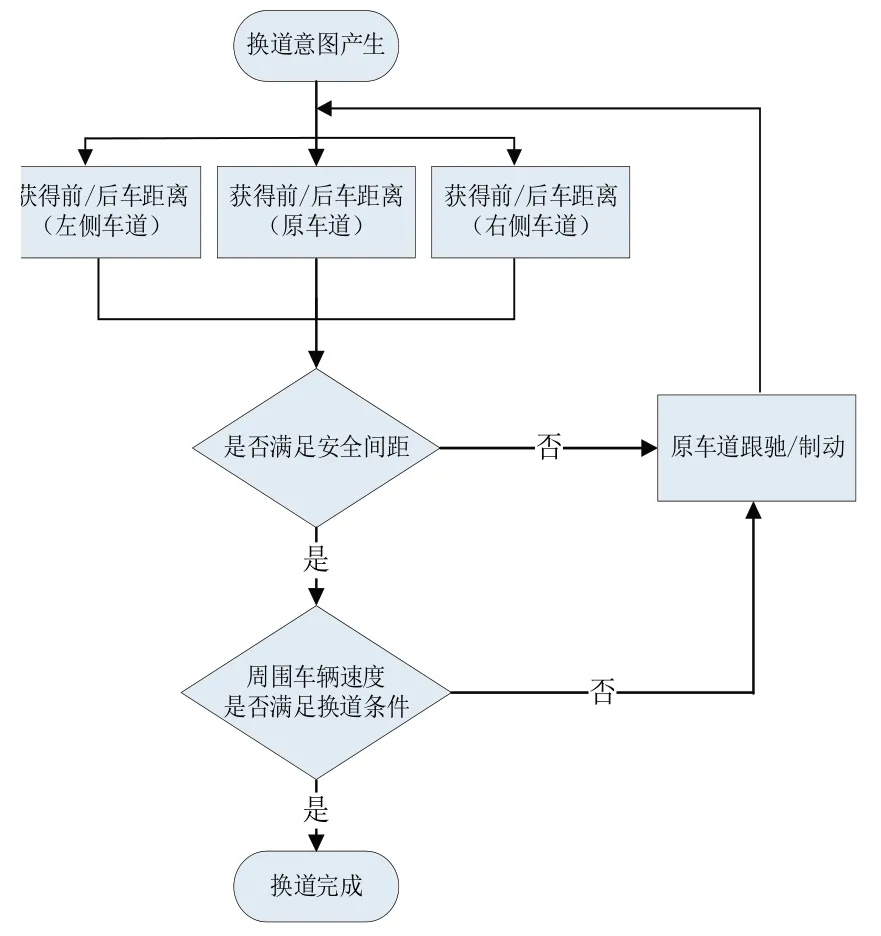
图2 换道决策流程
已有的研究指出目标车辆与前车以及目标车道前、后车辆之间的距离是影响车辆变道的关键因素,本文在已有研究的基础上提出了影响车辆换道的7个最重要参数,图3为本文选取特征参数的示意图。
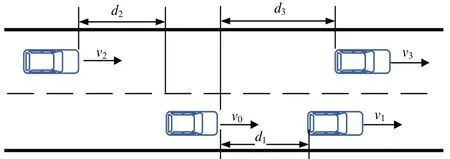
图3 特征参数示意图
图中符号的含义见表1。
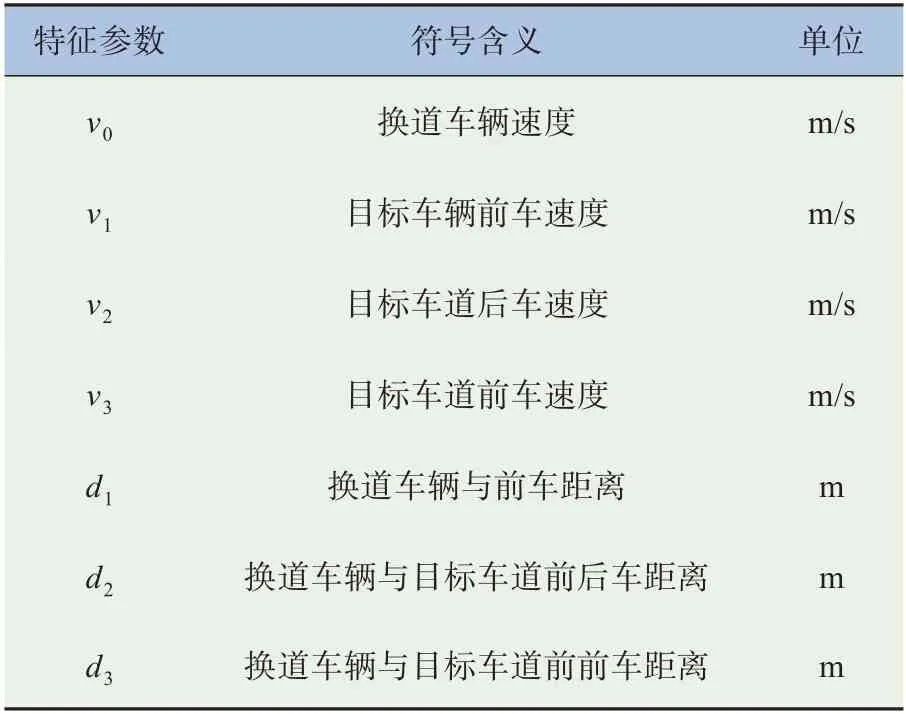
表1 车辆换道影响因素
2 基于HighD数据的车辆轨迹拟合
车辆换道时主要受到来自前车和邻道车辆行驶状况的影响,由于道路交通的复杂性,本文以HighD 数据集为数据基础,提取数据集中的换道车辆轨迹信息,选取特征参数。
2.1 HighD数据集
HighD 数据集是以德国高速公路为采集对象,通过配备高清分辨摄像机的无人机对高速公路6 个不同场景16.5 h 的车辆数据采集。图4 为某一采集路段的示意图,采集路段全长420 m,采样频率25 Hz,采集包括车辆外部尺寸、车辆坐标、行车速度、横/纵车辆加速度、车辆所在车道等信息。
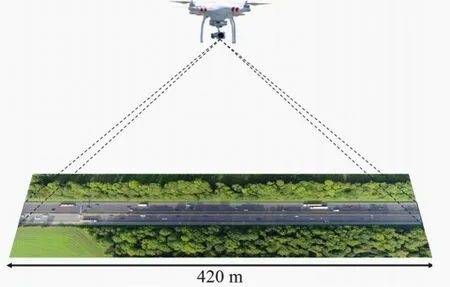
图4 采集路段示意图
2.2 车辆换道轨迹提取
HighD 数据中采集车辆类别包括汽车和大型货车,由于大型货车在行驶过程中总保持在道路右侧车道行驶,换道频率远小于汽车换道频率,为了能真实反映高速公路车辆换道决策行为,选取数据集中类型为汽车的行车信息。车辆的轨迹信息在数据集中以时间序列记录,其中包含了很多非正常换道信息,为了提取符合正常换道的轨迹信息,对换道时间进行限制,认为换道时间不超过8 s 且在换道动作结束后10 s 内保持当前行车道行驶。对于非换道车辆信息以目标车辆在采集时间内横向位移偏移量小于0.5 m 为筛选依据。利用Python 中pandas 库从数据集中筛选出1 900 组车辆轨迹数据,在筛选出的数据中包括换道轨迹955 组,未换道轨迹945组。对筛选出的数据进行整理,提取出所需要的车辆信息,部分数据见表2,车辆行驶信息均以离散点的信息记录,其中横坐标方向与车辆行驶的方向相同。

表2 部分车辆信息
在数据采集时,由于采集数据周期较短,车辆在采集路段车速较快,为了降低在短时间内车辆的位移和速度的改变对车辆换道行为的误判,同时减少系统和检测误差,本文选择高斯滤波拟合(Gaussian Fitting)曲线的方法提取车辆轨迹,高斯滤波基本原理如式(2)所示。
式中:为高斯曲线峰值;为峰值位置;为半宽度信息。
图5 为第48 号车的车辆轨迹图,相比原始数据,经拟合后曲线反映了车辆真实的轨迹信息。横向位移的改变是车辆换道的依据,为分析换道行为需要横向位移轨迹的提取。图6 为车辆横向位移拟合曲线,滤波拟合是将一系列离散的点经过滤波之后采用平滑曲线将其连接,以此表示真实的车辆行驶轨迹和横向位移轨迹。
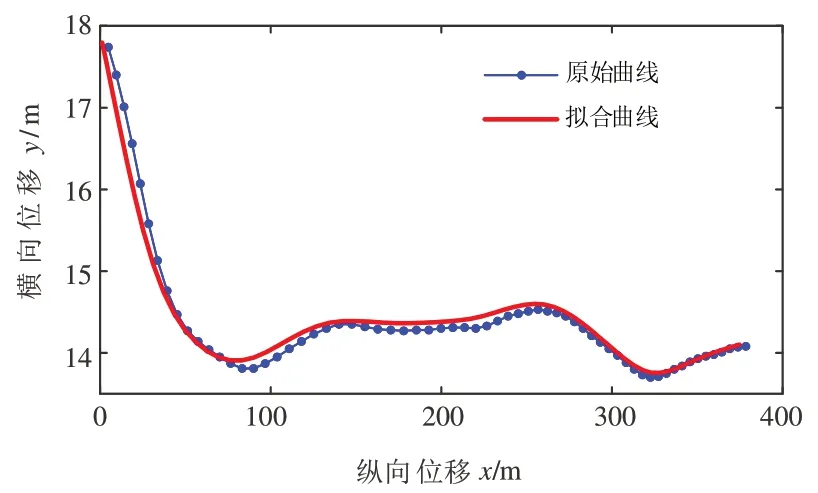
图5 车辆轨迹拟合
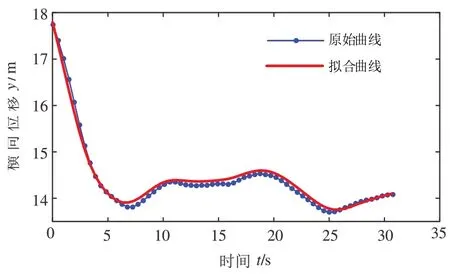
图6 横向位移拟合
2.3 特征参数选取
利用Python 中pandas 库对筛选出的1 900 组车辆数据进行处理,得到特征参数的部分数据见表3,在表中用1代表换道,2代表未换道。
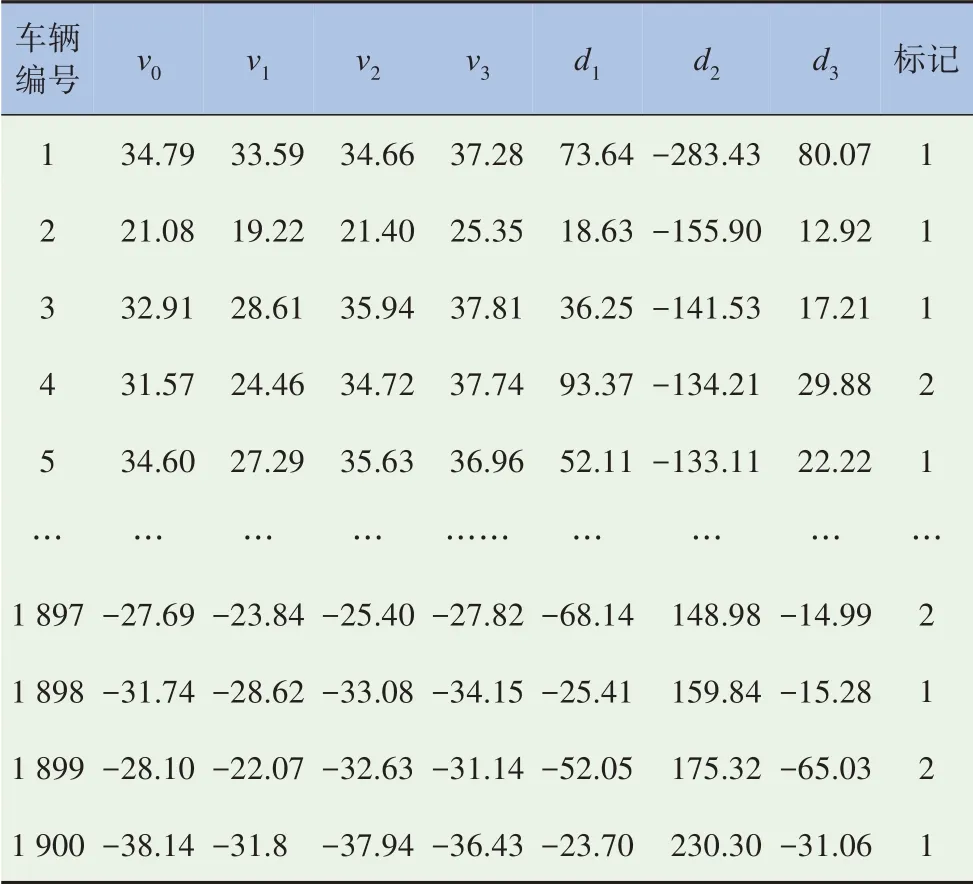
表3 部分特征参数信息
3 BP预测模型构建
BP 神经网络是由信息正向传播和误差反向传播组成的一种前向网络,输入信息经过隐含层的处理得到预测结果,预测结果与期望值的误差经过反向路径传播,通过动态调整神经元之间的权值和阈值,最终达到期望误差的范围。在复杂的非线性问题中,利用3 层神经网络能够求出问题最优解,因此,建立以3层网络为基础的BP神经网络预测模型,其基本的拓扑结构如图7 所示。在预测模型中输入层X 为影响换道的因素,输出层Y 为换道的结果,中间层H 为隐含层,w和w为BP 神经网络的权值。
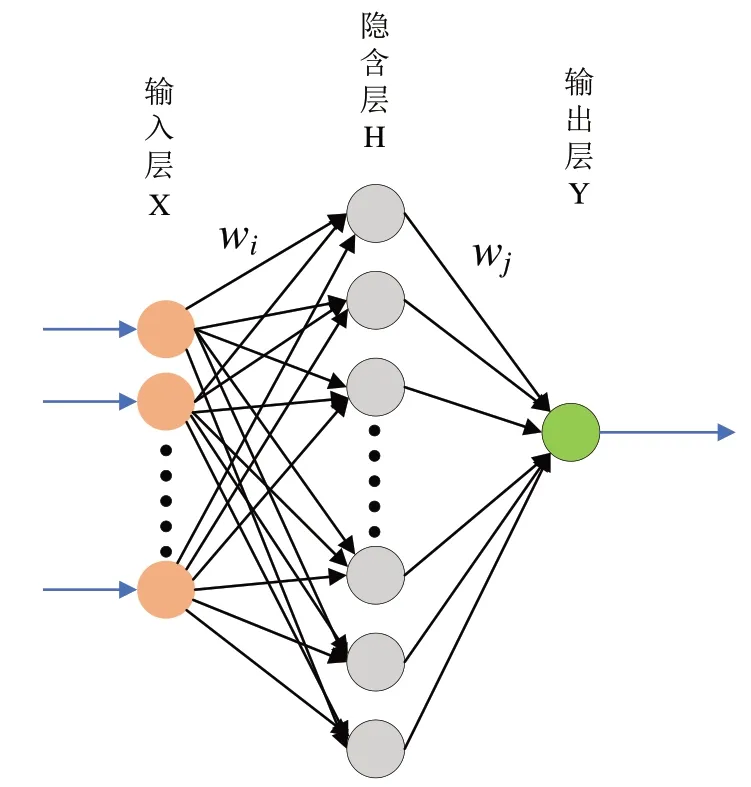
图7 BP网络拓扑结构
依据上文特征参数的选取,确定网络的输入层节点数为7,输出层节点数为1,隐含层节点个数依据经验公式(3)得出。

式中:和分别为节点数和输入层节点数,由于的取值在[1,10]之间,通过对含有的不同隐含层进行网络训练确定本文网络的隐含层节点数为10,最终网络结构确定为7-10-1。
为了能够获得准确的换道预测结果,需要网络不断进行误差反向传播,动态修正网络中的权值和阈值,式(4)表示了系统全局误差Δ():

式中:t()和r()分别表示输出节点对样本的预测输出和实际输出;为输入层神经元个数,为输出层神经元个数。
根据梯度下降法动态修正网络的权值和阈值,式(5)为迭代公式。
式中:表示网络学习率;表示动量比例系数;和+1分别为第次和第+1次的网络迭代。
建立预测模型的具体步骤如下:
(1)网络的变量输入。对原始数据进行筛选,特征提取,确保输入数据能够准确反映换道行为。
(2)初始化网络。网络学习率为1 × 10,动量比例系数为0.9,训练精度为1 × 10,对输入数据进行归一化处理,随机分配网络的权值。
(3)网络预测输出。通过计算预测值与真实值之间的误差,判断误差是否达到期望值,如果达到输出结果,模型建立。如果未达到期望值则返回输入层,通过调整权值和阈值进行下一次训练。
(4)网络测试。选取测试集进行网络训练,验证所建模型的正确性。
4 模型实现与验证
为了验证BP 神经网络模型预测车辆换道决策行为的准确性,首先将筛选出的数据分为模型的训练集和测试集,其中训练集1 400 组数据,测试集500 组数据,在测试集的数据中包含换道车辆信息256组,未换道车辆信息244组,图8为测试集的预测结果输出图。
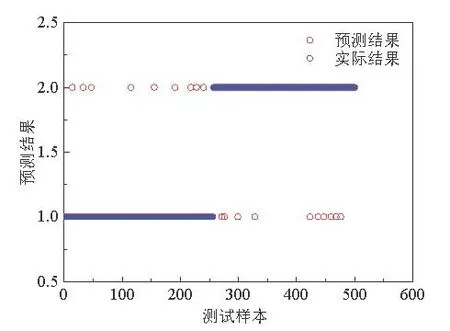
图8 7个参数模型预测结果
表4 为两种决策行为的预测结果,通过与数据集中实际数据对比,运用BP 神经网络建立的决策模型换道和未换道准确率分别为96.4%和95.9%,其整体决策准确率为96.2%,非常接近驾驶员的换道行为,证明了该模型能够应用到车辆换道的研究中。
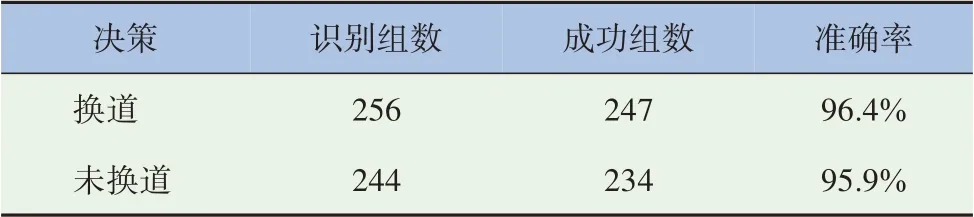
表4 7个参数模型预测准确率
为验证提出的7 个参数模型的有效性,按照上述模型建立方法以目标车辆与前车以及目标车道前、后车辆的距离作为3 个参数模型的输入,模型预测的结果见表5。

表5 3个参数模型预测准确率
3 个参数模型两种决策行为的准确率分别为93.7%和88.5%,整体决策准确率为91.2%,对比结果表明,以7 个参数建立的决策模型预测精度较高。
5 结论
本文通过分析车辆换道时的决策行为,提出一种以7个参数为输入的BP神经网络预测模型,利用BP 神经网络较好的非线性问题处理能力,结合真实车辆行驶信息训练模型,得出以下结论:
(1)以HighD 数据集为数据基础,通过设计BP 神经网络基本构架以及筛选换道车辆信息训练网络预测模型,结果证明7个参数的BP神经网络预测模型预测平均精度达到96.2%,能够为今后研究无人驾驶汽车的换道决策提供参考。
(2)仅考虑了高速公路车辆换道决策行为,为进一步研究微观交通流系统,还需要综合考虑城市道路交通状况,准确刻画车辆驾驶决策行为。
