基于LoRa技术的车辆检测系统组网设计
2022-02-19李钧威孙旭飞
李钧威,孙旭飞
(福州大学物理与信息工程学院,福建福州,350108)
0 引言
随着城市道路网络不断地扩大,交通拥挤所导致的时间与经济损失等问题,极大地破坏了城市发展。智能交通系统是解决交通拥挤的有效手段,交通信号机作为信号智能控制的终端设备,既要控制交叉口的交通信号,又要采集交通流信息,其中车辆信息的采集对系统起着基础和关键性的作用[1]。目前,交通信号机仍采用有线网络方式采集车检信息,如:传统的工业有线RS485传输系统,其不仅布线距离较短,在总线上所挂载的通信设备数量也有限,还容易受到地理环境的限制;相比之下,若采取无线网络进行通信,则可摆脱线缆的束缚,而且其具有造价低、施工安装周期短及后期维护方便等优点[2]。
目前无线通信技术种类繁多且适用于不同的应用场景,WIFI、zigbee等作为短距离无线通信技术的代表,其通信距离短且抗干扰能力弱,不适用于车检系统组网;以NB-IOT为代表的移动蜂窝技术虽然在长距离通信表现出众,但它处在收费的运营商频段,从成本上考虑同样不适合。近年来,LoRa(Long Range)是低功耗广域网中发展较成熟的通信方案,具有链路预算高、覆盖范围广、抗干扰能力强及成本低等优点。在交叉路口,外露的天线造价高且易遭破坏,因此天线一般都装在信号机箱内部,相比之下,LoRa无线技术容易胜任[3]。虽然LoRa的传输速率较低,但实际的车检数据量较少,对于系统的实时性是有保障的。因此本文选择了LoRa无线技术进行系统组网设计。
1 道路交叉口交通流信息传输的要求
在道路交叉路口的智能化交通信号控制中,交通信号机需要通过各类车辆检测器获取各个进口道上的交通流信息,每个进口道路上至少有一个或一个以上的交通流检测地点,检测到的交通流信息需要实时传送到信号机,因此,对于十字路口来说,交叉口的数据通信网至少是一对四的星型网络,若一个进口道有多个检测地点,则就是一对N的星型网络。另外,还要考虑信号机与移动的特殊浮动车辆的通信。在交通信号控制中,断面交通流信息有:在车状态、在车时间、交通流量、占有时间以及占有率。其中,占有时间和占有率,在交通信号自适应控制中是十分重要的参量之一,它的精准度取决于每一辆车经过检测地点时,车辆在断面上的停留时间,通常情况下,车辆检测器只负责传输在车状态(断面上是否有车),信号机负责计算在车时间。对于城市道路来说,一般车辆的在车时间在300ms~1200ms的范围,中间值为750ms,车辆状态时间的计算误差要求在100ms之内。显而易见,车辆检测器从检测到在车状态的变化开始,必须在100ms之内把信息传输出去。因此,道路交通数据的传输对通信网络的实时性要求是很高的。
2 系统总体方案
2.1 系统网络结构
本文设计的无线车辆检测系统主要通信设备包括位于信号机内的集中器模块(通信网的中心节点)、车辆检测器(通信网的固定节点)和浮动车辆通信模块(通信网的移动节点)。根据交叉路口的分布特征,系统采用四路口链路集联的通信模式,每条路口都需要建立与信号机集中器模块的通信网络,集中器模块通过有线方式与信号机通信,以无线方式接收车检信息,固定通信节点分布在各进口路上的固定位置检测车辆,浮动车作为移动通信节点也存在于各条进口路(后称链路)上。考虑到各链路上节点的实时通信问题,每条链路的第一个固定通信节点设计为路由节点,其具有中继功能,负责收集整条链路的车检数据并打包发给中心节点;链路上其余的固定通信节点称为上游节点,上游节点负责将该节点的车检数据上传给路由节点。
本系统中的通信节点数量较多,通信网络拓扑较复杂。集中器与固定通信节点、移动通信节点组成一对多的星型网络拓扑,该网络易于扩展及隔离故障,既满足了各节点的通信控制策略,又能实现交叉路口的现场车辆数据采集和数据远程上报等功能[4-5]。系统网络拓扑图如图1,通信示意图如图2。

图1 系统网络拓扑图

图2 通信示意图
2.2 组网设计
根据车辆检测系统的实时传输要求,需要确保时延在100ms之内,由于无线射频通信的特性决定了系统组网只支持一发多收的传输模式,随着节点数量的增多,多个通信网络包在信道上的冲突概率会大大增加,传统的主动轮询方式因其耗时久已不能满足系统需求,所以本文采用一种基于时分多址(TDMA)[6]的组网方式进行无冲突的主动上报。
2.2.1 时隙划分
系统将整个信道传输数据的时间划分成若干时隙,分配给每一个入网的节点使用,每个节点在自己分配的时隙进行主动上报,实现数据无碰撞的无线网络通信[7]。为了方便定时且尽量减少时间同步误差,而且要保证四条链路的车检数据100ms为一个周期上传一次,将节点总体时隙设置成1s为一个复帧,将这1s复帧平均分成10个100ms时隙帧,每一个时隙帧中都确保分配了四条链路的路由节点主动上报时隙。时隙的同步由集中器发送同步帧,各节点接收同步帧来实现。
根据LoRa传输时长的计算公式[8],以扩频因子(SF)为7、带宽(BW)为500kHz和编码速率(CR)为4/5为例计算得出节点传输一次车检数据(10字节)所耗费的时间约为10ms,考虑到实际环境可能存在偏差,对时隙留有一定余量,暂且将固定节点的主动上报时隙长度设置为16ms;由于移动节点发送间隔为1s,所以,每一帧中剩余的36ms作为移动节点上报数据时隙,将1s复帧中第一个移动节点上报时隙作为移动节点的入网操作使用,则一个复帧最多可上报9个移动节点的车检数据,多余的数据则顺延到下一个复帧上报,以此类推。复帧结构如图3所示。

图3 时隙复帧结构
如图4为链路时隙分配图,每一帧的时隙2~5为四条链路以100ms为一个周期的主动上报时隙,时隙后剩余的84ms则分配给其链路上的上游节点主动上报数据,上游节点的一个发送时隙同样为16ms,这样保证每个节点都有独立的发送时隙。

图4 链路时隙分配
2.2.2 信道划分
根据系统总体时隙划分情况,将LoRa无线通信信道分为两类,其一是数据主信道,其二是数据辅信道。其中,CH1是数据主信道,用作集中器与路由节点、移动节点通信的信道,其中包括了集中器广播、移动节点入网以及路由节点主动上报等操作;CH2-CH5是数据辅信道,用作四条链路的上游节点主动上报数据信道,每条链路分配一条信道,避免各链路节点通信产生干扰。
CH1-CH5共5个信道需要划分在不同的频段。
3 无线通信协议设计
3.1 组网通信时序
系统主要通信动作有节点入网、广播同步以及主动上报数据。系统通过集中器下发同步帧开始各项通信动作,节点收到时间同步帧后获取主动上报时隙。根据信道划分,主要包括集中器与路由节点、移动节点的通信时序,及路由节点与上游节点的通信时序。
集中器与路由节点、移动节点之间的通信在数据主信道CH1进行,集中器每隔1s发送时间同步广播帧,在帧1的时隙1阶段,路由节点收到同步帧后启动1ms定时器,接着切回各自的链路信道,若有车检数据需要发送,路由节点在主动上报时隙切回CH1信道发送数据;同时移动节点收到同步帧后,若入网成功则在相应时隙主动上报,否则进行入网申请,为避免多个移动节点同时申请入网,因此在申请入网前先对无线CAD信道进行判断是否空闲,空闲则发送入网数据,否则随机退避延时等待,超过退避时隙阈值则重新等待广播数据[9]。
在每秒间隔开始前5ms,路由节点切回CH1信道等待接收时间同步帧,接收完数据切回各自的链路信道。通信时序如图5所示。

图5 集中器与路由节点、移动节点的通信时序
路由节点与上游节点之间的通信在数据辅信道CH2-CH5进行,图6为通信时序,上游节点收到同步帧后开启1ms定时器,为保证通信时隙不冲突,要求上游节点在路由节点主动上报时隙前10ms不允许发送数据,确保路由节点不处于接收状态,上游节点主动上报时隙分配在路由节点主动上报时隙之后;在每秒间隔开始前5ms停止发送数据,切回CH1信道等待接收时间同步帧。

图6 路由节点与上游节点的通信时序
3.2 帧结构定义
本文设计的系统对应用层做了自定义的通信协议设计,通过对数据进行打包和解析操作实现集中器与各个节点之间的往返通信。其中,规定采用数据帧模式传输由二进制字节序列构成的数据流,最后在数据的帧尾端加入了CRC校验机制,确保数据传输无误[10]。
3.2.1 集中器协议帧结构
集中器下发的时间同步广播帧结构如表1所列,帧头定义为0x5A,入网成功的移动节点数量占用1个字节,移动节点车辆信息由序号及车辆标识号组成两个字节序列,根据实际入网情况进行广播,最后是校验和计算。
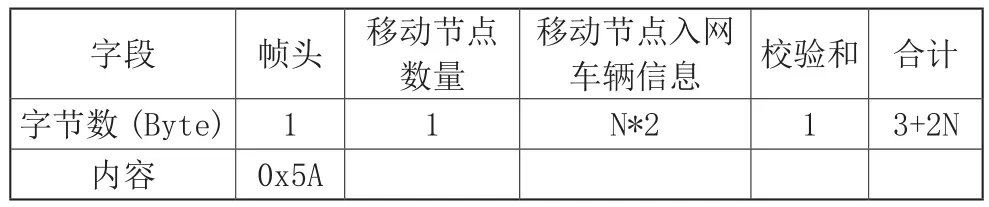
表1 集中器协议帧结构
3.2.2 固定通信节点协议帧结构
固定节点主动上报数据帧格式如表2所示,共包含10字节内容,帧头为0x6A,每个节点的唯一标识即链路地址占用1个字节,链路地址由硬件上的拨码开关获取;车检数据包括有无故障状态、有无车辆状态以及速度等参数信息。有无故障状态和有无车辆状态用二进制0/1表示,用两个字节16位来表示状态,则每一条链路最多可接入16个车辆检测器。

表2 固定通信节点协议帧结构
3.2.3 移动通信节点协议帧结构
移动通信节点到达路口后对集中器进行入网申请,集中器会在广播帧中告知入网成功的移动节点信息,移动节点离开路口后则会断开连接,把位置留给新的节点。
移动通信节点协议帧包括移动节点入网申请数据帧以及主动上报数据帧。入网申请数据帧结构如表3所示,帧头为0x7B,信息类型分为联网(0x21)与脱网(0x31)两种,加入了车辆唯一标识是为了区分不同的车辆。

表3 移动节点入网申请数据帧结构
移动节点主动上报数据帧结构如表4所示,帧头为0x7A,信息类型为0x51,同时预留五个字节存放车检数据,共计10个字节。

表4 移动节点主动上报数据帧结构
4 系统硬件设计
4.1 集中器硬件设计
集中器模块微处理器采用 STM32系列处理器STM-32F103VCT6,该芯片在保持了低功耗的基础上,采用32位ARM Cortex-M内核,具有较快的处理速度。集中器模块同时与各检测器模块和信号机主板通信,因此集中器模块的UART2串口通过有线RS232连接信号机主板,SPI1接口与LoRa模块相连接,本系统选择基于SX1268芯片的LoRa模块来实现无线通信功能,使用的是南京仁珏科技研发的LoRa模组,型号为M-XL6,采用SPI接口,其具有结构紧凑、低功耗、通信距离远等优点。另外提供了SWD接口的设计方便程序下载调试,预留了485总线用于接入其他设备使用。图7为集中器的电路结构图。

图7 集中器电路结构图
4.2 检测器硬件设计
检测器主板的MCU用到了微处理器STM32F103RET6,通过接入不同类型的车辆检测器获取车检数据。为了完成与集中器模块的数据交换,检测器主板通过SPI3接口接入LoRa无线模块,型号同集中器模块。同样设计了程序下载调试接口,UART2与PC机相连方便观察检测器工作状态,以及预留485总线用于连接其他设备。图8为检测器的电路结构图。

图8 检测器电路结构图
5 总结
本文根据系统架构设计,搭建系统集中器与检测器的硬件平台,并对各接口进行了调试,验证了系统的硬件设计合理可行,之后根据本文设计的通信协议,进行了简单的发包测试,确认了各节点之间数据能够正常交互,验证了本文研究的路口交通流数据无线通信的可行性。但由于时间有限,目前无线车辆检测系统还未运用到实际环境中搭建测试,今后还需要进一步研究并不断改进完善。
