基于ADAMS的新能源汽车悬架参数仿真与优化设计
2022-02-19贾长建
贾长建
(陕西工业职业技术学院汽车工程学院,陕西 咸阳 712000)
无人驾驶和新能源汽车是未来汽车的发展方向,新能源无人驾驶汽车结合了两大新的热门技术,因此对其可靠性提出了很高的要求。悬架作为汽车上最重要的一个总成,对于汽车的正常行驶有着重要的影响。汽车行驶过程中所受到的一切震动和冲击,小部分由轮胎分担,大部分由轮胎和车身之间的悬架来消化[1]。因此,悬架的可靠性决定了汽车的可靠性,对悬架的一些参数进行优化设计,是很重要的一项工作。本文以比亚迪唐新能源汽车为例,在ADAMS软件中建立其前悬架运动学仿真模型并进行仿真,检测出不合理的车轮定位参数,然后在优化模块中进行改进,从而提高该新能源汽车的行驶平顺性[2]。
1 前悬架建模
比亚迪唐新能源汽车部分参数见表1。以主驾驶位置为左侧,在ADAMS软件自带的坐标系上列出关键点的坐标,见表2。

表1 整车参数
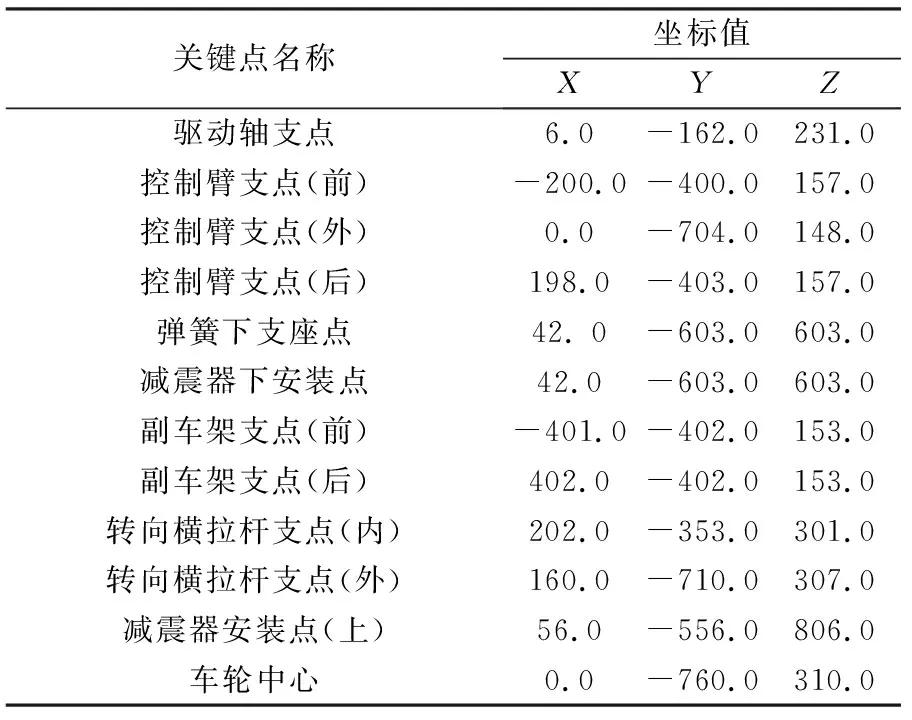
表2 左侧关键点坐标
依据以上参数,在ADAMS软件中建立前悬架运动学仿真模型,如图1所示。
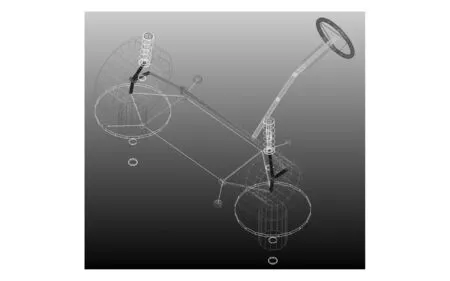
图1 悬架系统模型
2 双轮跳动试验
汽车行驶平顺性取决于车轮定位参数,因此对车轮定位参数的优化设计是很重要的一项工作,在建模完成后,对其进行双轮跳动试验,对不合适的参数进行优化[3]。对其模型进行两轮跳动试验,试验结束之后,在ADAMS软件中查看参数随车轮跳动的变化曲线。车轮的激励方程为S=50×sin(360×t)[4],S为车轮跳动距离,t为车轮跳动时间。试验设置两轮跳动的幅度为50 mm,该跳动幅度即为模拟的路面不平度。最后得出仿真结果。
车轮外倾角变化范围的理想值为-2°/±50 mm~0.5°/±50 mm。从图2可以看出,车轮在预设的跳动幅度下其外倾角变化范围为-0.88°/±50 mm~0.05°/±50 mm,符合要求[5]。
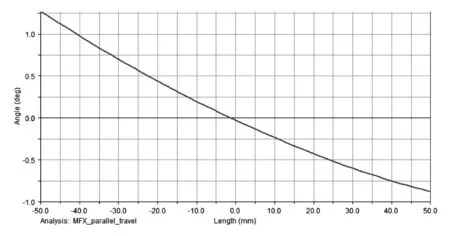
图2 车轮外倾角变化曲线
正常情况下,主销后倾角变化范围的理想值为2°/±50 mm~6°/±50 mm[6]。从图3可以看出,后倾角随着车轮跳动的变化范围为4.55°/±50 mm~5.71°/±50 mm,符合要求[7]。
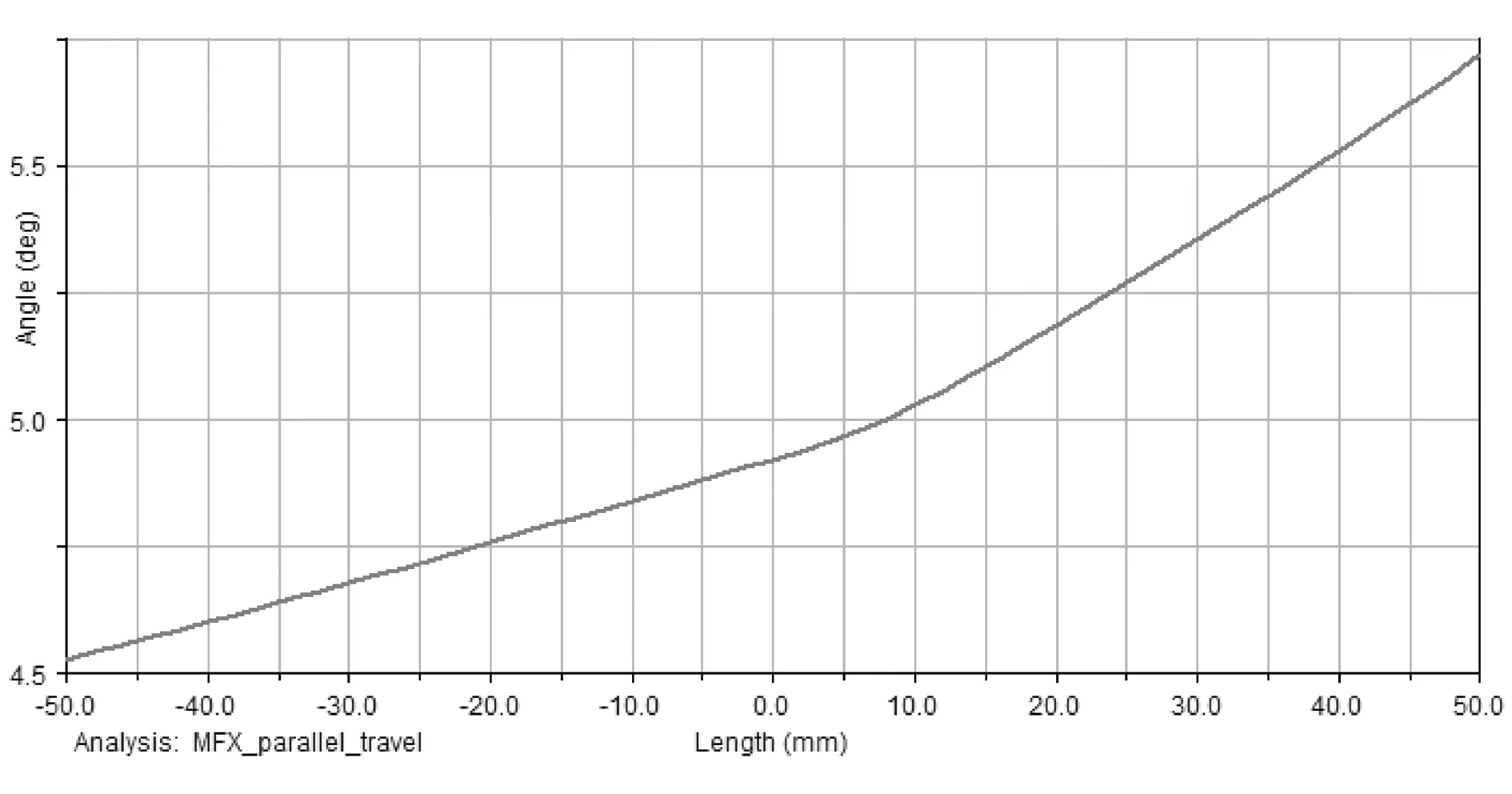
图3 主销后倾角变化趋势
主销内倾角变化范围的理想值为7°/±50 mm~13°/±50 mm,由图4可以看出,内倾角随着车轮上下跳动时的变化范围为11.40°/±50 mm~13.31°/±50 mm,不在理想范围内,需要对其进行优化设计[8]。

图4 主销内倾角变化趋势
前轮前束角变化范围的理想值为0°/±50 mm~-0.5°/±50 mm,在该范围内有利于汽车轮胎更好地工作[9]。图5所示为前束角变化曲线,由图可以看出,前束角也不在理想的范围内,需要对其进行优化设计。
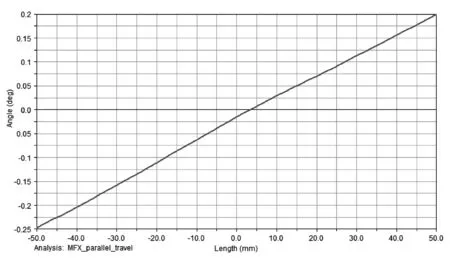
图5 车轮前束角响应特性曲线
至此可知,车轮的定位参数中有两个参数不合理,需要对其进行优化设计,以改善汽车行驶的平顺性。
3 参数优化
3.1 参数优化分析
在对汽车悬架参数进行优化时,不考虑悬架本身的质量和悬架受到的外力等因素,只对其进行运动学分析[10]。根据经验,选择5个关键点坐标进行试验设计,分别是:下控制臂前点、下控制臂后点、下控制臂外支点、转向横拉杆外点和转向横拉杆内点,每个点3个方向的坐标即为该点的3个变化因子,一共有15个因子,设定每个因子的变化范围为-10~10 mm,以前轮前束角和主销内倾角[11]为优化目标, 通过优化,得出15个因子对悬架系统性能的影响程度[12]。
在ADAMS中分别对15个因子进行迭代,得到优化目标与每个因子的关系。对迭代结果进一步分析,最终确定了6个需要优化的因子,即需要优化的参数,分别是:lca_rear.z(控制臂支点后点Z轴方向),lca_outer.z(控制臂支点外点Z轴方向),lca_front.z(控制臂支点前点Z轴方向),tierod_inner.z(转向横拉杆内点Z轴方向),tierod_outer.z(转向横拉杆外点Z轴方向),lca_outer.y(控制臂支点前点Y轴方向)。对这6个参数进行进一步设计,得到最终的优化设计结果[13]。
3.2 优化参数仿真
根据优化之后的参数,建立前悬架模型再次进行仿真,并对比优化前、后的仿真结果[14]。从图6和图7可以看出,优化后前束角和内倾角的变化范围均在理想的范围内[15]。
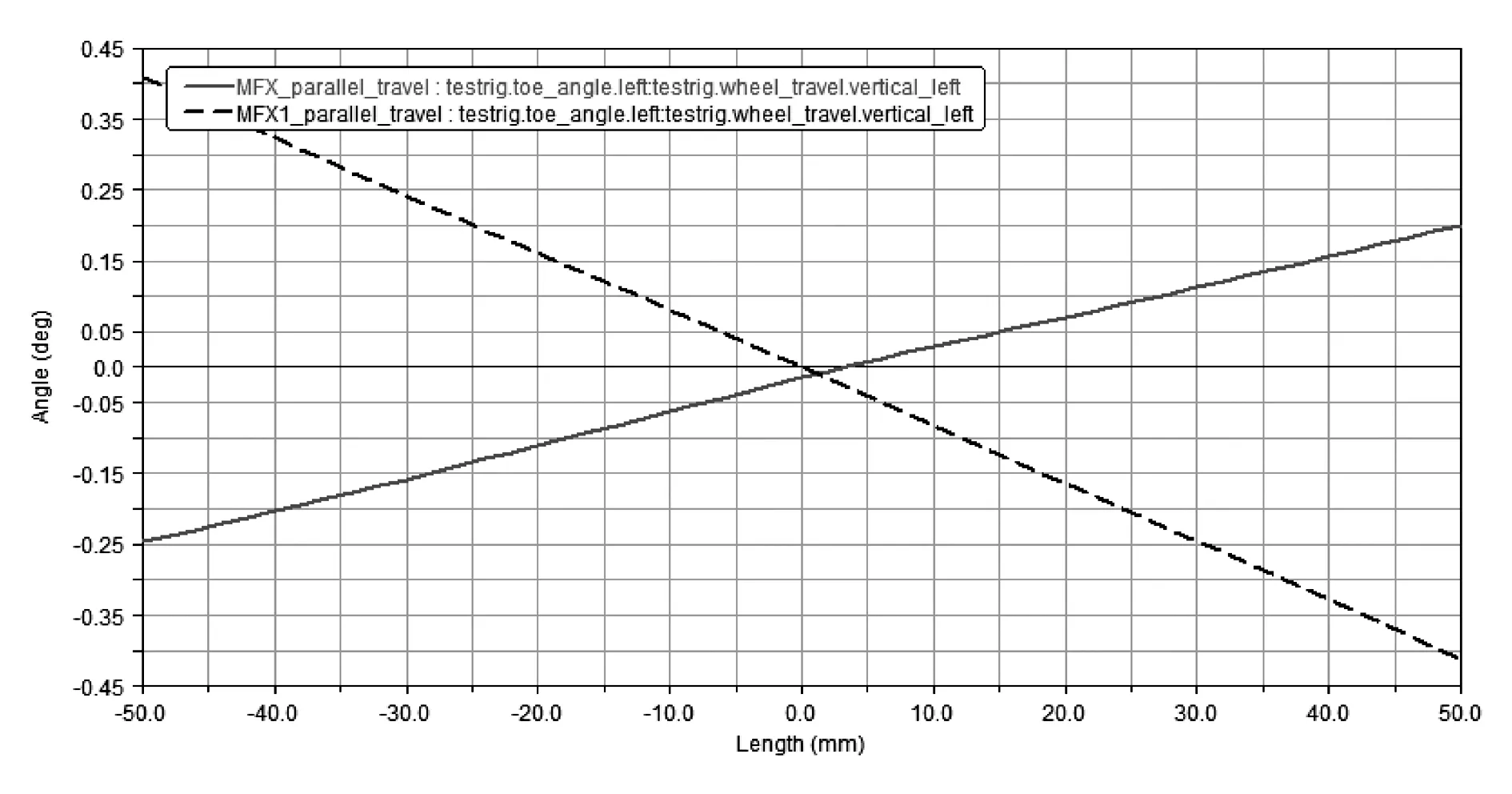
图6 优化前、后前束角的变化对比

图7 优化前、后主销内倾角的变化对比
4 结束语
本文运用ADAMS的Car模块、Postprocessor模块和Insight模块对新能源汽车悬架进行运动学仿真分析和优化设计,提高了汽车的整体性能,为新能源汽车悬架的改进和整车的设计打下了坚实的基础。
