基于螺旋理论对4-URU并联机构自由度分析*
2022-02-18王远
王 远
(1.山西工程职业学院机械电子工程系,山西 太原 030009;2.中北大学机械工程学院,山西 太原 030051)
0 引言
近年来,并联机器人的性能特点逐渐被机器人科研工作者所研究,和串联机器人相比,并联机器人因其突出的稳定性、刚度、承载能力以及精度等结构特性被应用到工业、航天、农业等领域[1]。并联机器人首次进入大众视野是Stewart提出的Stewart并联机器人的形式,该机构的设计是用来对飞行员进行训练的[2],后来被众多研究者继续开发出各种不同形式的并联机构[3];Delta机器人是目前在工业生产线上应用较为广泛的并联机器人,具有四个自由度,由三条臂组成,这三条机械臂通过万向关节和基座相连[4],根据该并联机器人的结构组成及特点,可认为是平行四杆机构的延伸与拓展[5]。由于机器人的研究需要大量的数学理论作为研究基础,随着数学理论和机构学理论的不断融合,使得串联、并联机器人的研究有了一系列不同程度的突破[6]。拓扑图论、旋量理论、李群、李代数、四元数等各种数学工具不断被研究人员引入机构学理论,使机构学理论有了大量的创新与发展[7]。
螺旋理论(也称为旋量理论)的引入对机器人的构型及自由度类型的研究有着举足轻重的作用[8]。螺旋理论在创立之初一直无人问津,直到20世纪中叶,Dimentberg应用螺旋理论对空间机构进行分析时才被研究人员所了解[9]。
目前,针对串联、并联以及混联机器人的研究大多数对机器人的构型、自由度、运动学、动力学以及工作空间等进行分析,这些性能指标的好坏将直接影响机器人的工作精度、工作速度以及工作稳定性[10]。作为这些指标的基础,机器人自由度的研究已经有了较为全面的发展,本研究采用旋量理论对一种4-URU并联机构进行自由度分析,通过传统的G-K自由度公式和旋量理论进行对比,得出旋量理论的应用对自由度的求解具有较好的直观性,具有很大的科学研究价值。
1 自由度计算
4-URU空间并联机构简图如图1所示,该机构由四个相同的URU支链、动平台n1以及静平台n2组成,和静平台n2连接的是虎克铰(U副)。初始状态下,其中的一个R副轴线垂直于静平台。和该运动副相连接的是连杆l1,连杆l1和l2通过R副相连接,R副轴线平行于静平台。连杆l2的另一端通过U副与动平台相连接。
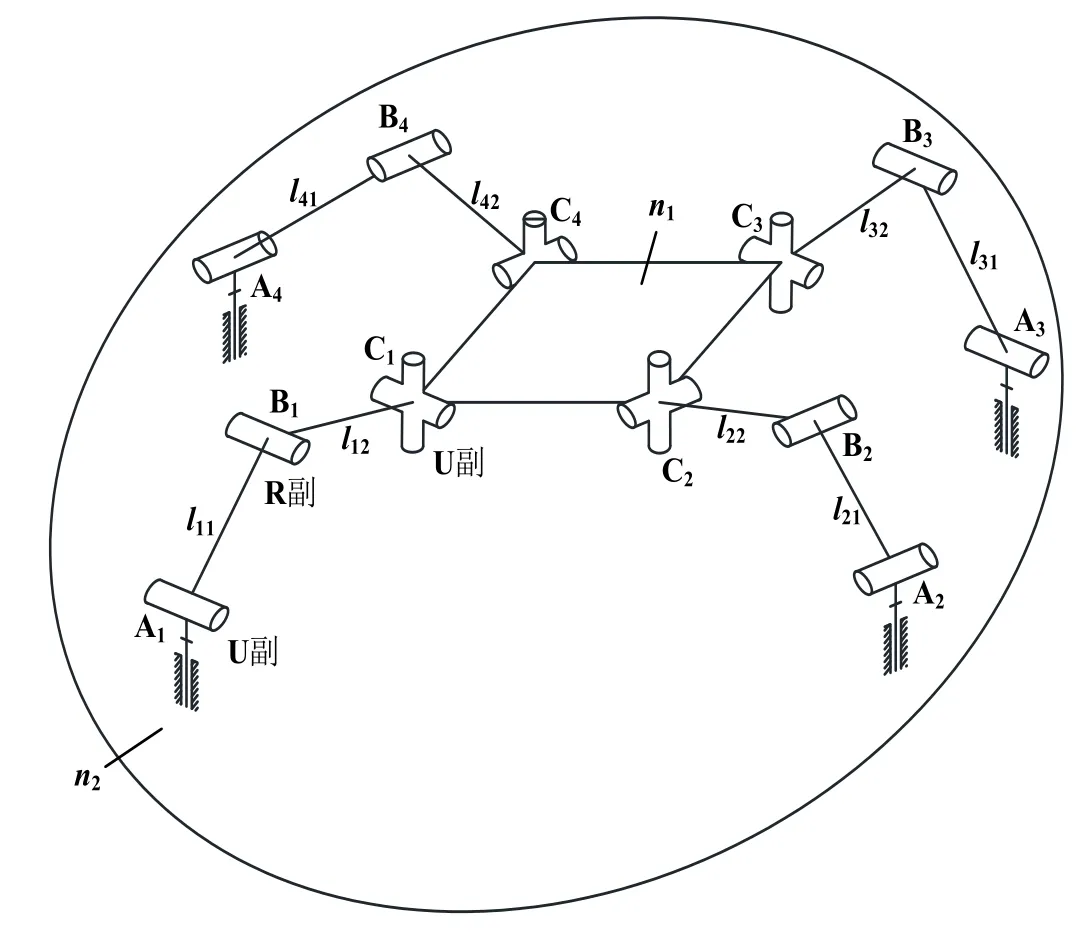
图1 空间4-URU并联机构简图
在该机构的四条支链中,支链A1B1C1和支链A3B3C3相对应的运动副的轴线平行,支链A2B2C2和支链A4B4C4相对应的运动副的轴线平行,支链A1B1C1和支链A2B2C2相对应的运动副的轴线相互垂直。从图1中可以看出,这四条支链的自由度数都是相同的,因此只需要对其中的一条支链进行分析。现以支链A1B1C1作为研究对象开始分析。
支链A1B1C1的旋量分析示意图如图2所示。该支链由两个U副和一个R副组成,U副可看作由两个轴线相互垂直的R副组成。因此,该支链的运动副可认为由5个R副组成,其中有3个R副的轴向是相互平行的。最下面的R副轴向与静平台垂直。
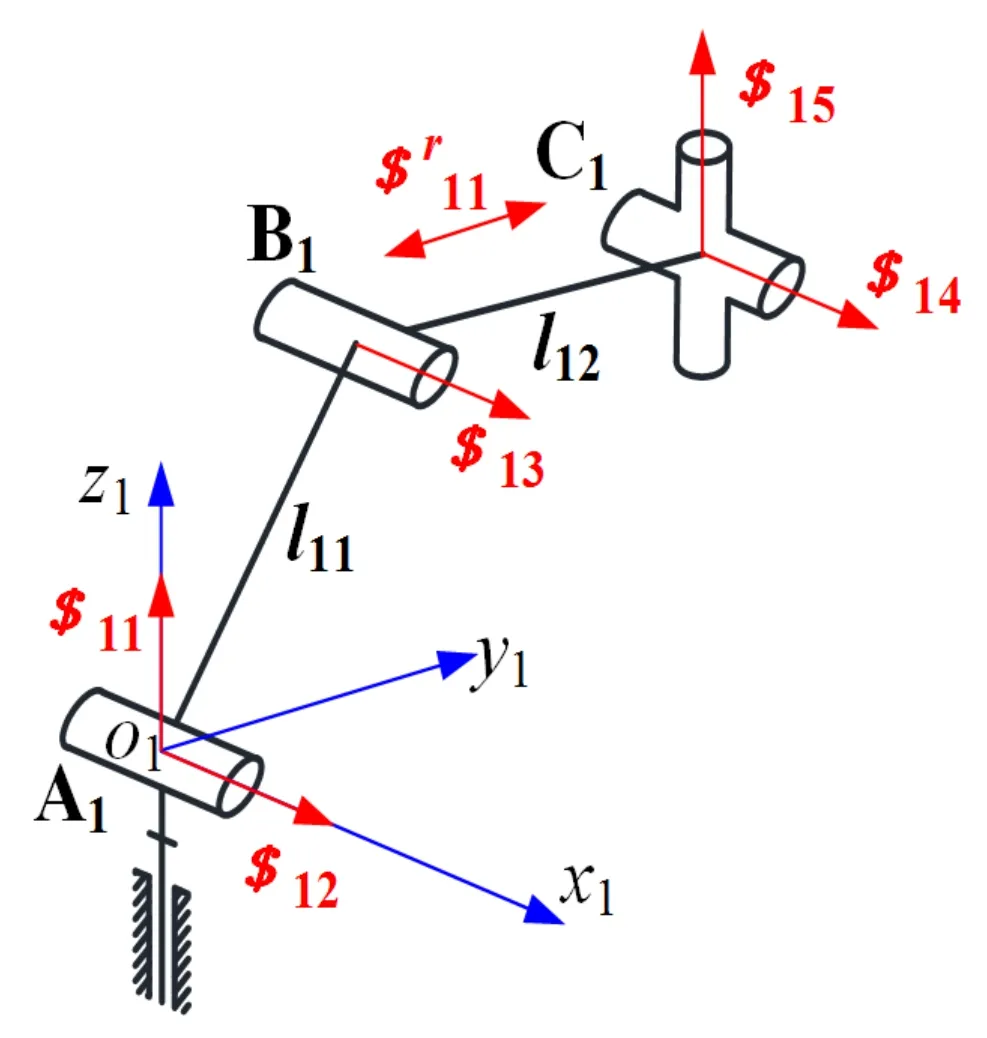
图2 支链A1B1C1的旋量分析图
在支链A1B1C1上建立坐标系o1-x1y1z1,根据旋量理论,一个螺旋如$=(S,S0),S表示的是转动,S0表示移动,由于该支链只有转动副,因此这5个R副可通过5个螺旋来表示。

以上这5个螺旋组成支链A1B1C1的运动螺旋系。欲求出该支链的自由度,只需要求出该螺旋系的反螺旋即可。式(1)中e3、f3、e4、f4、d5均为标量,这些标量的取值不影响反螺旋的求解。由于该反螺旋与式(1)中任意一个螺旋的互易积都为零,因此可得到:

根据式(1)和式(2)可求出该反螺旋:

观察该反螺旋可知,该螺旋是个约束力偶,如图2中用双箭头所表示的力偶该力偶平行于y1轴,并且该力偶垂直于U副中两个R副的轴线。因此可知,支链A1B1C1具有一个沿y1轴线方向的约束力偶,即限制了绕着y1轴线的转动。由于该4-URU机构具有四个相同的支链,因此可以建立如下反螺旋系:

可以看出该反螺旋系线性相关,因此该反螺旋系中有两个虚约束。若继续对式(4)进行反螺旋求解,将会得到该机构需要的自由度,如式(5)所示:

从式(5)可以很明显看出,该4-URU并联机构具有4个自由度,分别是3个移动自由度以及1个绕着Z轴的转动自由度[11]。
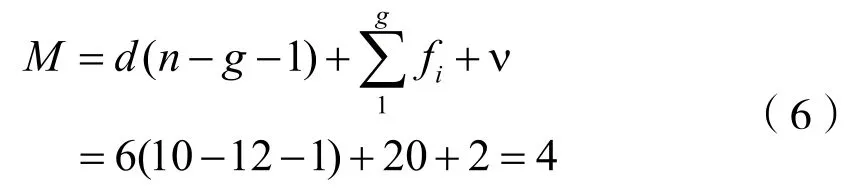
该自由度结果可通过修正的G-K公式进行验证。式(6)中,d=6,n表示构建的总数,g表示运动副的数目,fi表示第i个运动副的自由度数。由于该机构具有两个过约束,v=2,可得:
2 结论
尽管通过修正的G-K公式可解出并联机构的自由度数目,却无法求出每个自由度的类型,而通过旋量理论不仅可解出机构的自由度数目,还能判断出每个自由度的类型。因此,利用旋量理论来求解机构的自由度具有非常大的优势。
