超长型桁架式堆垛机的设计
2022-02-18周维存
文/周维存
随着物流仓储行业的快速发展,各个行业对仓储效率、仓储智能化的需求日益增加。不只是现代化工业,传统行业如船厂、钢管厂等对自动化仓储也有一定的需求。在此背景下,不管是传统的行车、还是自动化程度较高的堆垛机,均不能完全满足运输该类货物的工况,需要非标定制专用设备。该设备不仅需要满足传统行车的桁架式钢结构,以克服超宽货物带来的挠度过大问题,也需要带有货叉的堆垛取放功能,因此融合两种设备的优点进行专用设备开发。在铸造钢管、天然气管、型钢等生产企业,由于物料过长,占地空间较大,耗时耗力,储存物料困难。该机型可以为这类特殊货物节约成本,提高存储效率,实现仓储自动化。
一、设计特点与分析
常规堆垛机金属结构为上横梁、立柱、下横梁组合而成的金属框架,在巷道内水平运行,结构一般较为稳定。由于堆垛机需要配合常规托盘使用,其大致结构与尺寸大同小异。而桁架式不同于常规堆垛机,它的应用工况是在货架顶部进行水平运行,因此其金属结构无立柱,其框架结构需要融合上横梁、下横梁的功能,既要安装行走轮,也需要安装起升链条卷筒,使其能够在货架顶部运行。
由于钢管结构等货物的规格特殊,其长度特别长,已经远远超过国际托盘的尺寸,因此需要将金属结构、载货台宽度加宽到十余米。由于框架、载货台的尺寸过宽,因此该结构静载挠度远大于常规堆垛机。在开发设计的过程中需要经过严格计算与软件分析,才能保证结构的刚度,防止挠度过大造成的取货偏差与运行问题。
设计产品实施项目后,对于制作工艺与结构变形量与软件模拟还是存在一定区别。现场在安装设备时,由于横梁、载货台过宽,安装轨道时,由于距离较远,测量工具不能满足测量要求,只能使用激光测距,因此需要特别注意轨道的安装平行度。且对于货架的承重、安装精度要有较严格的要求。
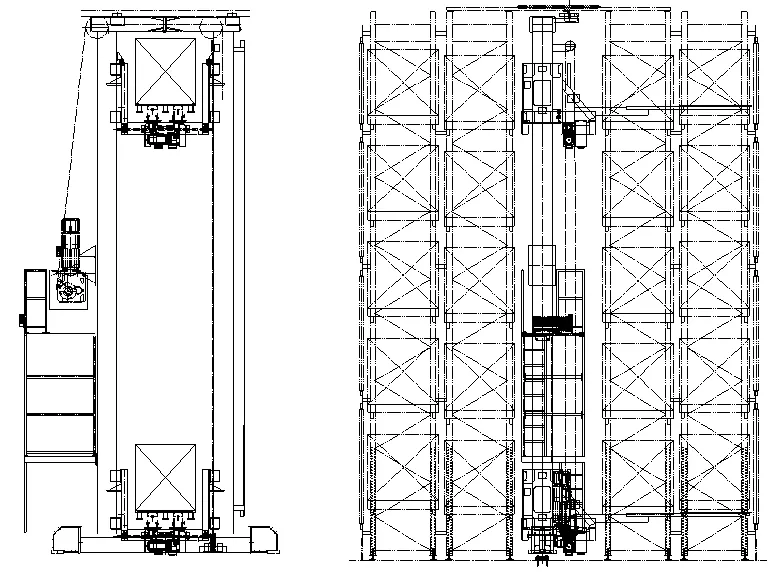
图1 常规堆垛机工况示例图
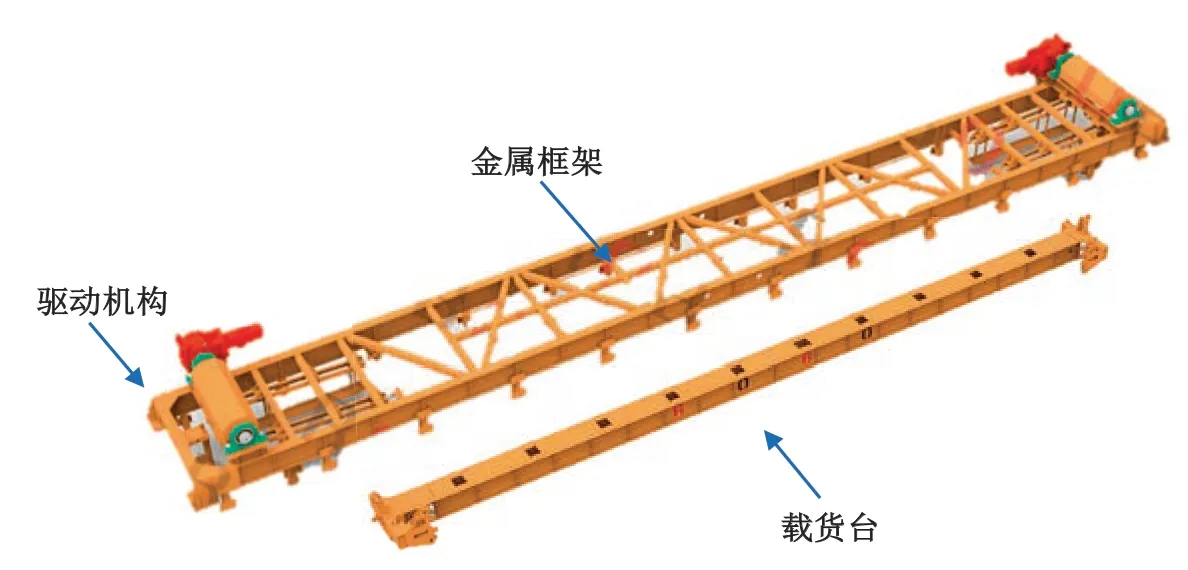
图3 金属结构示例图
二、结构设计

图4 金属结构有限元分析图
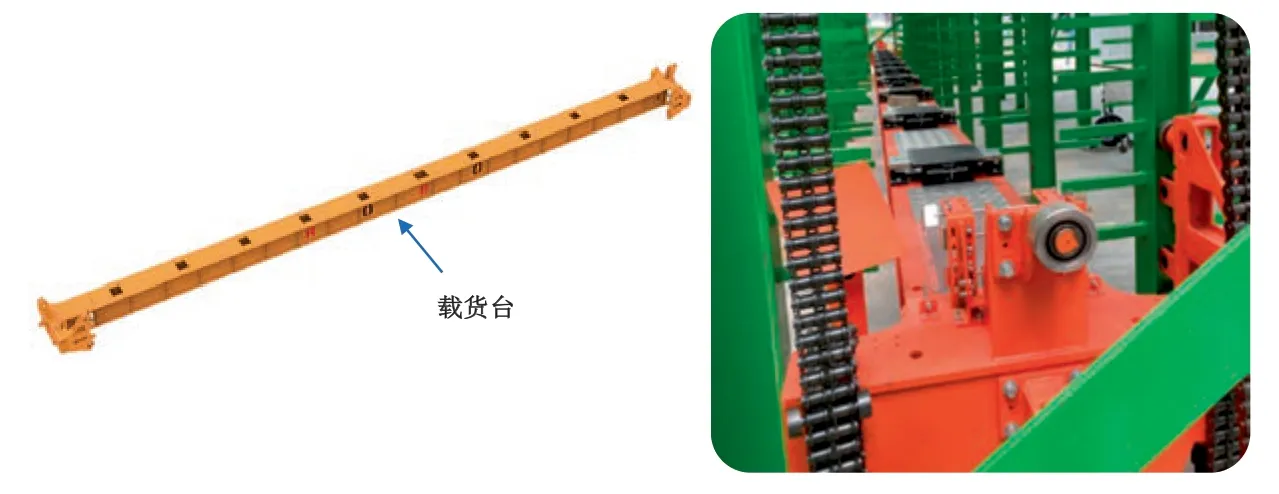
图5 载货台示例图
金属结构主要由槽钢、型钢、钢板、矩形管等焊接组成。金属框架主体结构是由钢板焊合或槽钢焊接的开口断面[1],由钢板、方管焊接而成,焊接时严格控制焊缝宽度及焊接件结构的垂直度、平行度,以保证整体结构安装尺寸。内部设有大量的工字钢加强筋,以保证整体结构的挠度和使用寿命。
在金属框架上设置有水平运行机构和起升运行机构,包括主动车轮、被动车轮、驱动电机、同步带轮组等。在金属框架上设有安装链条的导槽、支撑架等机构,整个金属结构设计优化合理,通过有限元分析模拟超长框架的挠度,再通过加强筋与焊接加强版进行加固。这种超长堆垛机用的起升装置主要由同步伺服电机、辅助导向轮组、集油盒装置、起升链条、导轨固定支架组、马达固定座、带座轴承、双排链轮、驱动轴、导轨、防护罩、弹簧装置及挡板组成。
设计该结构的参数:载重500kg,货架总高约8.2m,金属框架总宽度约17m。货物规格为8000mm~16200mm,货物宽度60mm~300mm。
《JB/T7016-2003巷道堆垛起重机》规定:悬挂起重设备主梁的挠度容许值,其挠度值应不大于L/1500,L为堆垛机主梁总长=18000mm,因此理论刚度要求小于12mm。静态状态下时上横梁最大变形量为8.256mm<12mm,刚度符合要求。
载货台主要由起升导向轮、金属框架等组成。载货台上装有存取货物的货叉伸缩机构,防止意外坠落的安全保护装置,以及用于距离和位置检测的开关等。通过起升机构的电动机使同步带上下移动,从而带动载货台沿立柱的垂直方向升降。
设计输入:货物额定载荷M=500kg;货叉自重M2=750kg;水平框架承载F=ma=12000N。
《JB/T7016-2003巷道堆垛起重机》规定:悬挂起重设备主梁的挠度容许值,其挠度值应不大于L/1500[2],L为载货台水平框架总长=16600mm,因此理论刚度要求小于11.067mm。
静态状态下时上横梁最大变形量为9.176mm<11.067mm,刚度符合要求。
在铸造钢管、天然气管、型钢等生产企业,由于物料过长,占地空间较大,耗时耗力,储存物料困难。该机型可以为这类特殊货物节约成本,提高存储效率,实现仓储自动化。
三、驱动机构设计
堆垛机通过水平运行机构在巷道中运动,水平运行机构包括两套主动车轮组、两套被动车轮组、双电机减速器、水平导向轮组、夹钩等。主动车轮与被动车轮置于地轨上,水平导向轮与地轨配合,使堆垛机能沿轨道运行,并且下横梁内侧还装有夹钩,防止堆垛机侧翻。被动车轮组中有调节装置,能自动调整车轮平行度。在地轨两头还设有聚氨酯缓冲器,在堆垛机接触时能够减少碰撞产生的冲击力。堆垛机运行机构电动机功率选择,除了考虑稳定运行的静功率外,还必须考虑克服移动质量和旋转质量所引起的惯性载荷所需的加速功率[3]。
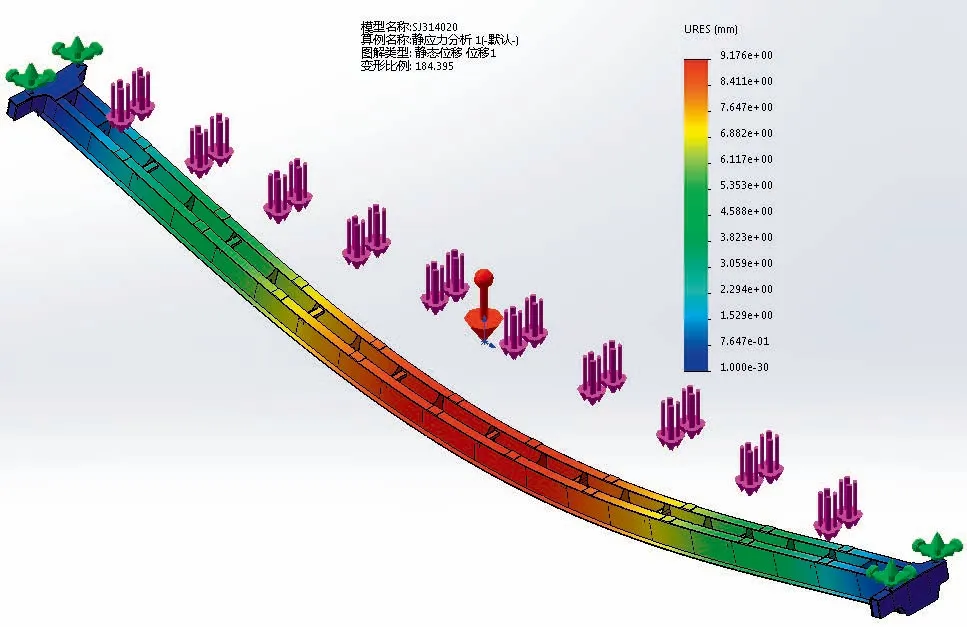
图6 载货台有限元分析图
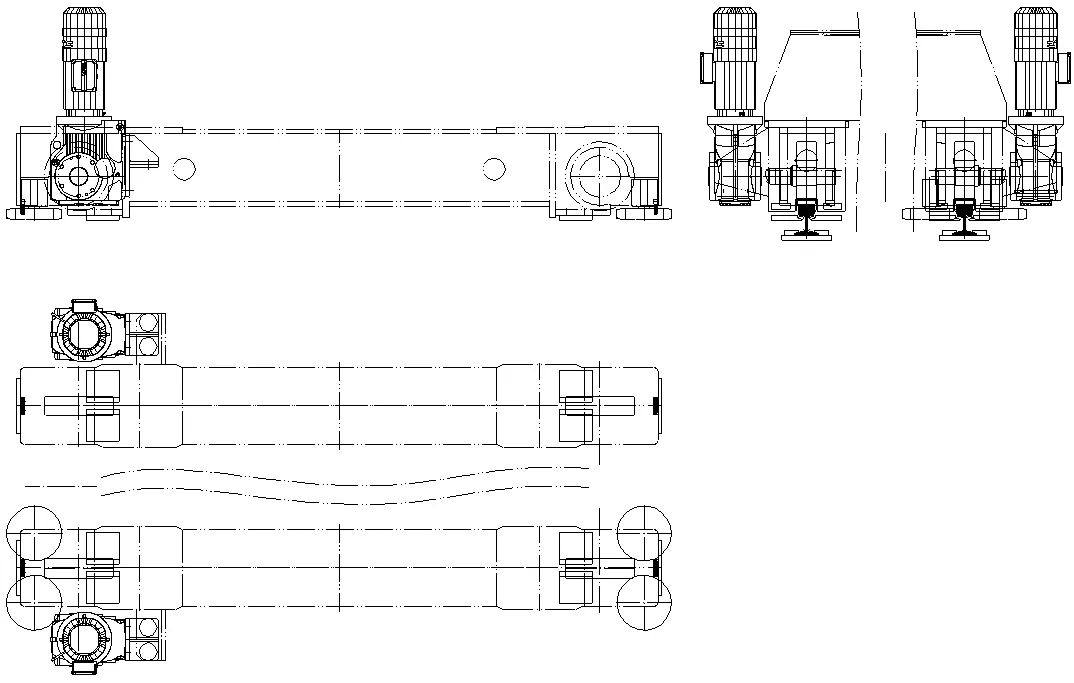
图7 驱动机构示例图
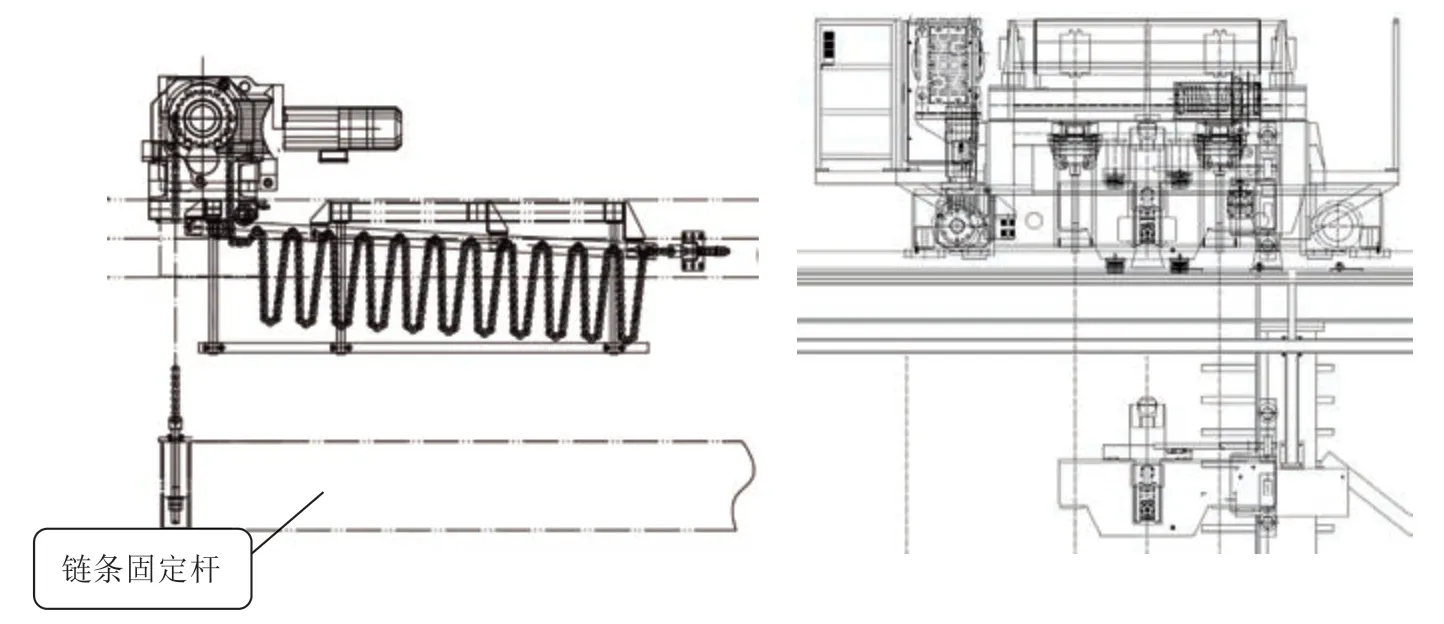
图8 链条起升装置示例图
水平运行机构是由动力驱动和主被动轮组组成,用于整个设备巷道方向的运行。我们选用了德国SEW公司的螺旋伞齿轮直交轴电机减速机直接驱动车轮,质量可靠、维护方便、噪声低。
使用双电机驱动时由于设备两电机距离较远,钢结构刚度不足极可能造成双电机运行不同步,使用西门子电机同步功能进行矫正,可以保证两电机输出轴转速与力矩保持一致。
该桥式堆垛机设计的运行速度为30m/min,加速度为0.5m/s2。
电动机的静功率:

加速时所需功率∶
带载加速功率:
电动机的制动力矩MB:

式中:MB—制动力矩(Nm);ε—平均角加速度(rad/s2);
∑J—机构旋转件的总转动惯量(kg·m2);
ML—负载力矩,
JM—电动机的转动惯量(kg·m2);
JL—电动机轴上的等效转动惯量,(kg·m2);
tB—制动时间(s);
根据Pm和MB,查看电机选型样册,初选电动机型号。
减速器功率PJ:
Md—轮轴扭矩
D—走轮直径(m);
可查看电机选型样册,找出速比i和减速器功率PJ对应的减速器型号。
经负载功率与运行参数计算,考虑到设备宽度过长,需要双驱启动来保证运行的稳定,电机选用SEW公司KA87/DRL100L4BE伺服电机。由于金属结构的宽度过大,双电机驱动时,非常容易造成电机不同步的情况,从而造成设备报警。设计采用西门子电机控制程序,通过程序自优化功能改善驱动运行不同步造成的误差。
这种超长堆垛机用的起升装置主要由同步伺服电机、辅助导向轮组(1)、集油盒装置、起升链条、辅助导向轮组(2)、导轨固定支架组、马达固定座、带座轴承、双排链轮、驱动轴、导轨、防护罩、弹簧装置及挡板组成。柔性件分为链条和钢丝绳两种。链条传动的优点是承载能力大,但是自重大,有可能突然断裂、安全性差[4]。
动作原理:起升过程,起升链条一端与载货台固定,一端挂在双排链轮上,通过载货台自重及货物重量,可使链条得到张紧,双排链轮另一端的起升链条为松弛状态,因起升链条自重,自由下垂,因为有双排两轮的齿形加持,起升链条在运行过程中不会存在跳齿现象,起升链条通过辅助导向轮组(1)进度导轨,因链条滚轮间隔设置,链条成段堆叠自行收集;下降过程,双排两轮带动链条向下释放,与载货台连接侧始终处于张紧状态,原本链轮松弛状态的链条由于辅助导向轮组(2)的导向,也形成了张紧状态,避免了链条的跳齿现象。
链条设计采用滚子链,极限拉伸载荷不小于280kN,链条牢固度要求小周和外链板、套筒和内链板均应链接牢固,常规车辆条件下,测得链条两端的相对扭转角度不大于4°/m。链条铰链应灵活,滚子和边滚轮能在360°范围内自由转动,销轴两端铆合牢固可靠。
该桥式堆垛机设计的起升速度为20m/min,加速度为0.5m/s2。经负载功率与运行参数计算,电机选用SEW公司KA127/DRL160M4伺服电机。
货叉伸缩机构是堆垛机存取货物的执行机构,装设在载货台上。为减小巷道的宽度,且具有足够的伸缩行程,本机构采用三级直线差动式伸缩货叉,由伸缩货叉(上)、伸缩货叉(中)、固定货叉及导向轮等组成。
固定货叉安装在载货台上,固定货叉、伸缩货叉(中)、伸缩货叉(上)之间由链轮链条进行连接。电机减速器通过链轮由链条驱动链轮轴上的链轮,再由链轮轴上两个链轮带动链条、链条、链条驱动伸缩货叉(中)从固定货叉中点向左或向右伸缩时,又带动伸缩货叉(上)以三倍的速度进行伸缩。
由于货物规格较宽需要使用多套货叉取货,货叉之间使用万向联轴器进行串联,电机驱动机构启动时货叉伸出,并借助联轴器牵引各个位置的货叉伸出取货。

图9 链条安装示例图

图10 货叉伸缩机构示例图
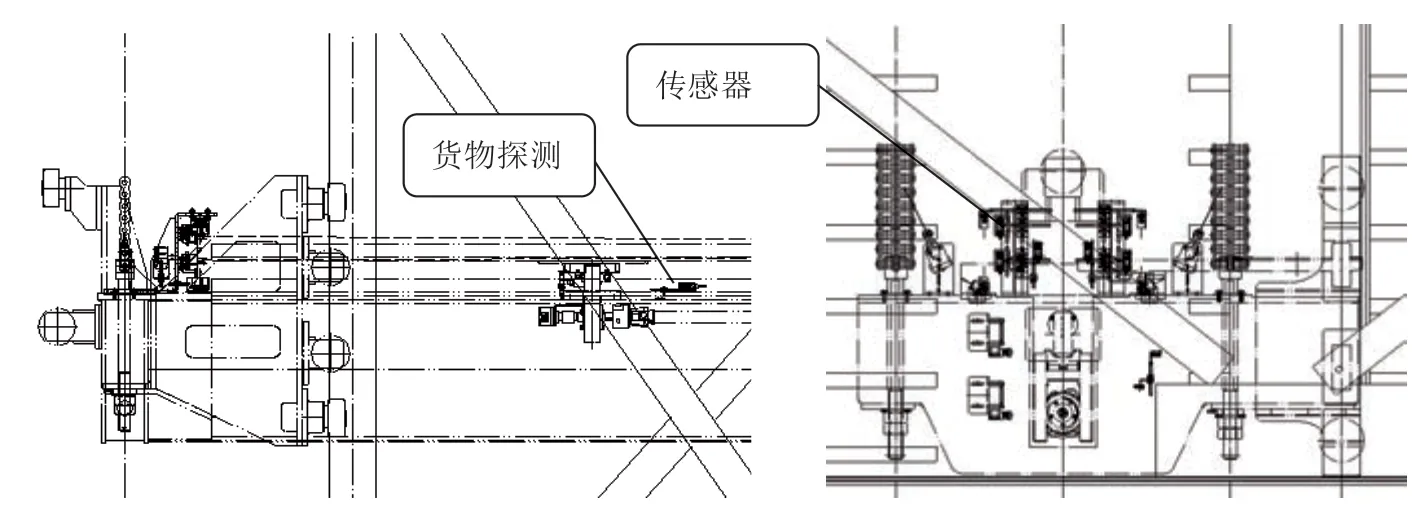
图11 机电结合布置示例图
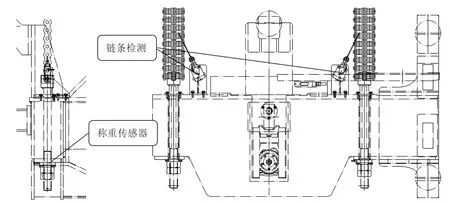
图12 断链称重保护装置示例图
四、机电结合装置设计
堆垛机在巷道中运行时,依靠认址装置及限位装置来确定运行的相对距离与位置。在本次堆垛机设计中,采用可靠的激光测距认址进行位置判定,定位精度可达到±3mm。设备外部设有集电臂,采用滑触线供电。端部设有红外通讯装置,与金属框架的接受装置配套使用。对于货物,货位检测装置设有超高、超宽、外形坍塌、探测货物等多组传感器。使该设备能够具有堆垛机完备的大多数功能。
该设备拥有链条断裂检测、称重检测功能,使用四个探测传感器对链条进行探测,当链条断裂时触发传感器报警,设备停止运行。链条固定杆下方安装有称重传感器,当载货质量超过额定载荷时,触发称重传感器报警。
五、结论
随着常规立库的需求逐渐饱和,及较低的技术门槛,传统堆垛机已经不能完全满足现代工业发展的需要, 特殊行业市场对特殊机型的堆垛机需求反而越来越多,尤其在钢材等行业, 设备所处的工作环境对效率的要求不是特别高,但要求可用空间的利用率相对较高,且输送料件较长,因此需要一款超长又可以实现多条巷道共用特点的堆垛机。针对这些特殊需求,本文介绍的这款新机型桁架式堆垛机可以完全满足,在保证产品功能的前提下,完成超长型桁架式堆垛机的设计,提高了仓储空间利用率。
