综合导航系统信息融合模拟仿真平台设计
2022-02-18祝中磊卞鸿巍王荣颖
祝中磊,卞鸿巍,马 恒,王荣颖
(海军工程大学电气工程学院,武汉 430033)
0 引言
信息融合问题是船舶综合导航系统(以下简称综导系统)的核心问题之一。目前,综导系统信息融合研究存在以下问题:1)常用综导系统的信息融合研究主要基于理想化假定模型,仿真条件与最终实际系统并不一致,难以充分验证仿真分析的有效性;2)在综导系统联调阶段,主要关注系统内外接口测试,对信息融合性能测试检验尚不充分,也缺乏有效技术手段;3)实船海试考核阶段,主要测试系统的稳定性、可靠性以及不同模式的切换管理,信息融合对系统精度性能提升的最终贡献度尚难以有效检验。产生上述问题的原因是理论仿真阶段缺乏基于实装海试数据的设备误差模型和统计特性,实船条件缺乏评估所需的船舶各主要运动参数的基准真值,同时在海试阶段又难以遍历各种复杂工况和边界条件。
与此同时,随着技术的快速发展,综导系统网络体系结构、计算机软硬件技术水平大幅提升,特别是公共计算资源在全舰的不断推广应用,为综导系统采取更为复杂和多样的信息融合技术提供了强大的计算和存储能力支持。因此,有效开展面向未来船舶,充分发挥现有软硬件技术能力的综导系统信息融合技术研究十分必要和迫切。搭建新型的综导系统信息融合模拟仿真研究平台的目的就是为了在陆上实验室更加有效地开展综导系统信息融合技术研究。
但目前国内专门针对综导信息融合的研究平台并不完善,国内相关研究单位对相应平台进行了开发,但距离满足上述要求还存在以下主要问题:1)关注多线程多通道综导数据模拟交互、教学培训等需求,对信息融合的研究弱化;2)船舶运动参数生成时对外部环境影响的考虑不充分;3)研究信息融合的算法单一,多数只采用了卡尔曼滤波算法进行信息融合。
针对上述问题,本文介绍了一种新型的综导系统信息融合模拟仿真研究平台。该平台支持多种信息融合算法并行运行,支持实际设备海试数据回放、接入测试和运动基准重建,支持考虑多种海洋环境影响、更符合船舶实际运动特点的运动参数生成;并充分考虑未来全船公共计算资源的利用,为未来开展基于误差特性机器学习和深度学习等新型融合算法的应用研究奠定基础。本文将对该平台设计中的关键问题进行介绍。
1 系统总体设计
综导系统模拟仿真平台主要由综导信息融合模拟评估导调台(以下简称导调台)、惯性类导航设备模拟器、非惯性类导航设备模拟器、综合导航模拟器、电子海图系统以及数据分析服务器等6个模块组成,总体架构如图1所示。各模块分别安装于6台不同的计算机,采用千兆以太网相互连接。
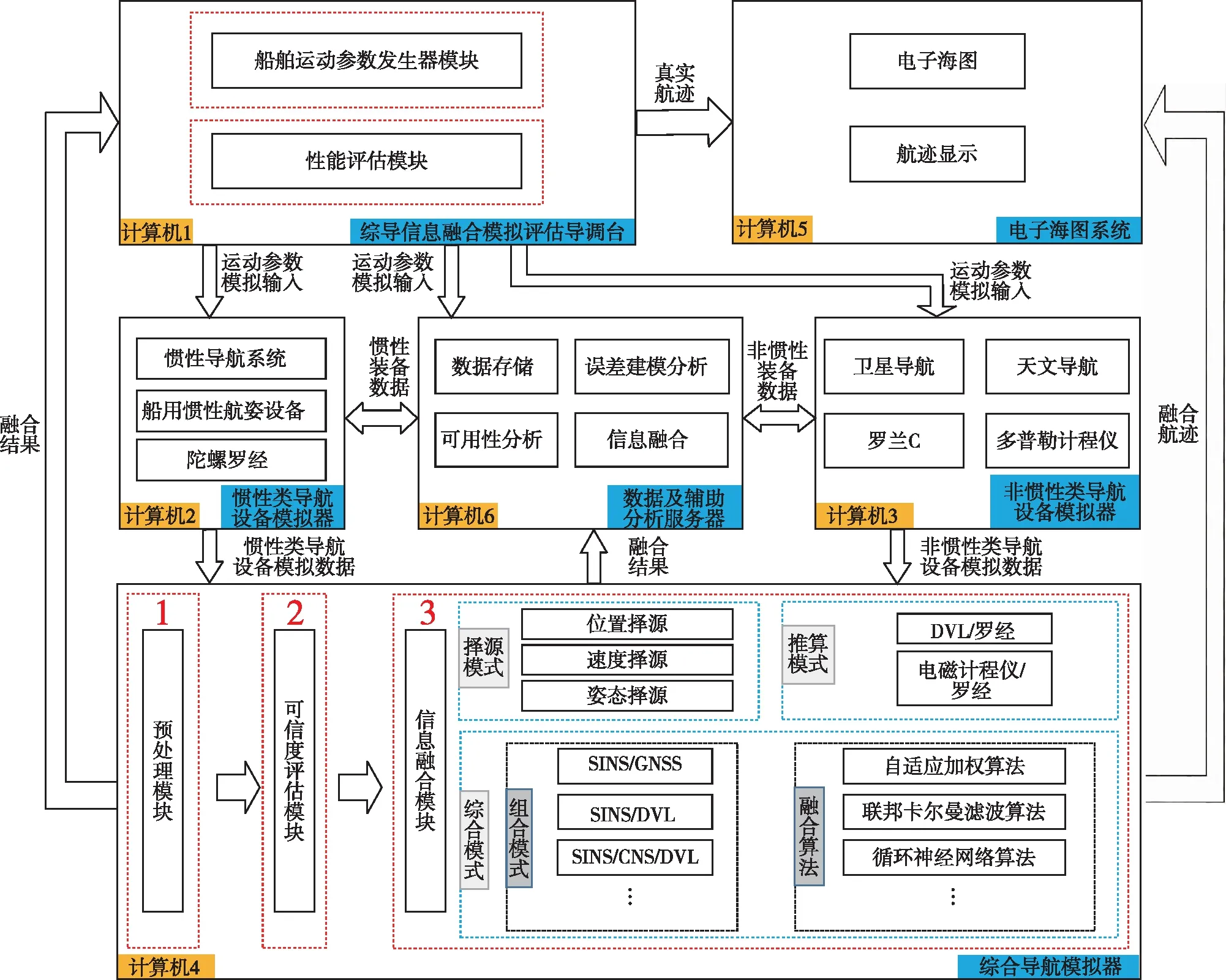
图1 系统总体架构Fig.1 System architecture
导调台主要包括船舶运动参数发生器和性能评估模块,船舶运动参数发生器生成导航基准信息以及导航设备的模拟输入值,性能评估模块主要用于对综合导航模拟器的结果进行性能评估;惯性与非惯性类导航设备模拟器用于生成多种导航设备的模拟测量值;综合导航模拟器对导航设备模拟器的模拟测量值进行预处理、可用性评估、信息融合等处理工作,其结果与测量值一同送入数据分析服务器进行存储分析;数据分析服务器主要用于存储、事后处理分析数据,以高性能计算机为硬件模拟公共计算资源,提高系统存储和计算能力,并协助综导系统信息融合决策;电子海图系统主要用于协助导调台规划航路、显示导调台和综合导航模拟器的轨迹。
2 子系统设计
2.1 综导信息融合模拟评估导调台
导调台主要用于模拟船舶的实际运动,提供载体基准真值,并利用模拟基准对综合导航模拟器的输出结果进行性能评估。下面主要介绍导调台中船舶运动参数发生器的设计情况。
船舶运动参数发生器是导调台的主要模块,其功能为生成船舶运动参数(如位置、速度、航向及姿态等信息)以及为导航设备模拟数据生成所需的基准参量(如舰船运动角加速度、线加速度等)和海况信息(如流速、流向、风速、风向等)。下面介绍发生器的设计思路。
首先,根据航路规划得到船舶的航路段,设计各航路段的运动状态;其次,基于船舶加速度运动模型,根据船舶运动状态和风流浪海况等信息,求解出每一时刻的船舶线加速度、角加速度;最后,通过船舶运动参数解算方程求解位置、速度、航向和姿态信息,得到船舶运动参考信息(如图2所示)。

图2 船舶运动参数生成图Fig.2 Ship motion parameters generation diagram
可以看出,求解每个时刻船舶线加速度、角加速度为设计发生器的重点。但由于船舶线加速度、角加速度的解析式求解难度大,而用于信息融合研究的船舶实际运动的模拟并不需要特别精确的解析式。为此,本文采用近似解析船舶运动加速度的求解方法。
(1)船舶机动加速度模型
船舶运动状态有匀速、变速、回转运动等,海况有海风、海流、海浪等。设船舶在载体坐标系下线加速度、角加速度分别为、;匀速、变速、回转运动、海风、海流、海浪等导致的船舶线加速度分别表示为~,角加速度为~。船舶加速度模型为

(1)
其中,为6×1的控制系数向量。如当船舶处于匀速运动状态,海况为无风、无流、有浪时,=[1 0 0 0 0 1],其余情况以此类推。
(2)船舶线加速度模拟表达式
以船舶变加速为例,求解式(1)中的近似表达式。
通常船舶沿直线加速时的实际线加速度很难保持恒定常值,而是连续不断变化。文献[15]提出了一种采用指数函数(见式(2))描述线加速度模型的方法,能体现载体线加速度变化,但在初始时刻线加速度指数函数的初始值设置不为0,与变速的初始时刻线加速度接近为0的实际情况不符。
()=35e-009
(2)
为保证船舶线加速度连续平稳变化,本文采用平滑的二阶系统欠阻尼阶跃响应作为船舶变速运动时的速度变化函数,然后再对其求导得到船舶线加速度。假定在零初始条件下,船舶速度及其导数线加速度的值均为0。设零时刻船舶经过加速后速度稳定在m/s附近(如图3所示),则速度表达式为

图3 船舶加速时速度变化曲线Fig.3 Speed curve during ship accelerating

(3)

假定在载体坐标系下,船舶做直线加速运动时右向和天向的线加速度为0,对式(3)求导可得前向加速度的表达式为

(4)
式(1)中其余各项表达式的求解方法与类似,在此不再赘述。
(3)船舶机动性能指标
除确保船舶线加速度连续变化外,采用二阶系统响应作为速度函数还可使船舶的性能分析相对简单。由二阶系统的性能指标公式可知,上升时间为

(5)
假定选取误差带为= 0.05时的调节时间为

(6)
上升时间反映了船舶的变速响应速度,体现了船舶的机动性;调节时间反映了船舶速度维持在期望值附近的快慢,体现了船舶的稳定性等特性。
2.2 导航设备模拟器
导航设备数据可采用理论建模生成和原始数据回放等形式。理论建模通过建立的数学模型模拟导航设备的输出,相关内容在此不展开;原始数据回放则直接将实际导航设备海试数据作为导航设备模拟器的输出。原始数据回放形式仅需显示和发送信息,能反映导航设备的真实试验情况。
2.3 综合导航模拟器
综合导航模拟器模拟综导系统的主要功能,完成对导航信息的预处理、可用性评估、信息融合等工作(如图4所示)。预处理完成有效性判定、坐标统一、时间同步、野值剔除等操作。可用性评估算法利用各设备同类导航信息间关系计算评估信息可靠性和可用性,可信度低于50%视为导航设备出现故障,并将结果在综合导航模拟器的显控界面显示。择源算法包括位置、速度和姿态择源算法,根据可用性评估的结果,手动或自动选择信息来源。推算算法有多普勒速度仪(Doppler Velocity Log,DVL)/罗经和电磁计程仪/罗经两种推算模式,根据导航信息和选择的推算模式进行船舶航迹推算。在综合模式下,设定组合模式后,利用选择的融合算法对各导航设备信息进行融合处理。融合算法包括自适应加权算法、卡尔曼滤波算法、循环神经网络算法等,综合导航模拟器采用多任务多线程方式并行运行上述融合算法。

图4 综合导航模拟器信息流程图Fig.4 Information flow chart of integrated navigation simulator
2.4 数据分析服务器
数据分析服务器主要用于在线数据存储、在线与离线数据处理分析。采用配备高性能图形处理器(Graphics Processing Unit,GPU)的计算机模拟公共计算环境,使得数据分析服务器具备较强的存储与计算能力。
数据分析服务器主要有存储、建模、可用性分析、信息融合等功能。存储主要实现对海量数据的存储管理;以在线和历史存储数据为基础,采用多种方法完成导航系统的误差建模;根据导航系统特点,自适应选取有效算法实现对各导航系统信息的可用性分析,并根据要求反馈结果;信息融合功能要求实现在多种不同工况、不同导航信息条件下采用机器学习、深度学习等智能算法的信息融合,提高系统精度,协助综导系统进行信息处理和决策。
2.5 电子海图系统
电子海图系统是导航系统航海作业的核心设备,为船舶航行提供引导决策。为使系统更加贴近实际设备效果、增强用户体验、体现演示系统的完整性,并为未来模拟训练提供功能支持,选取基于S57等标准的电子海图系统嵌入平台。电子海图模块还可协助导调台规划航路,显示导调台生成的基准轨迹与综导模拟器输出的融合轨迹。
3 系统测试
3.1 功能测试
惯性类导航设备模拟器和综合导航模拟器的功能测试过程如下。
如图5所示,导调台将运动参数信息发送到惯性类导航设备模拟器后,模拟器按照设置的工作模式、初始参数等信息生成惯性类导航设备模拟数据,并在界面上实时显示。

图5 惯性类导航设备模拟器Fig.5 Inertial navigation equipment simulator
如图6所示,在采取多种融合算法并行运行完成对各导航信息融合之后,综合导航模拟器将在界面上显示处理结果以及设置的相关环境模拟信息。
图6 综合导航模拟器Fig.6 Integrated navigation simulator
其余模块的功能测试与上类似,在此不再赘述。经过多次运行测试,各模拟器工作正常。
3.2 信息融合性能测试
测试一种信息融合方法的性能,首先需要在平台中配置好信息融合算法,通常需要配置融合算法名称、参数列表、融合算法和流程、初始化等内容。在配置好融合算法后,可利用平台测试其性能。
本文以惯性导航系统(Inertial Navigation Sys-tem,INS)/全球导航卫星系统(Global Navigation Satellite System,GNSS)组合卡尔曼滤波算法为例,选取实测数据进行仿真测试。实测数据包括INS、北斗卫星导航系统(BeiDou Navigation Satellite Sys-tem,BDS)、GNSS、组合接收机等。以组合接收机的位置信息为基准,将INS/GNSS组合卡尔曼滤波的融合结果与单一设备中精度最高的GNSS进行对比分析。
如图7所示,平台能按照所选择的融合算法融合,并以误差曲线形式对比展示融合效果。相较于单一设备中精度最高的GNSS,采用INS/GNSS组合后的精度较高,位置误差基本维持在10m内。

图7 位置误差对比Fig.7 Position error comparison
4 结论
1)本文提出了一种船舶综导系统信息融合模拟仿真平台的系统架构和设计方案。
2)该平台生成船舶运动参数时,充分考虑了多种海况环境干扰,使综导系统的仿真条件更加接近实际系统;采取并行运行多种融合算法,比较不同算法的性能差异;嵌入基于S57等标准的电子海图系统,具有贴近实际设备效果、用户体验感强的特点;采用高性能计算机作为数据分析服务器的硬件,具备更强的存储与计算能力。
3)综合导航系统信息融合模拟仿真平台可用于船舶信息融合算法的设计、分析、测试评估等工程研发工作,具有较好的工程实用价值。
