对一种无人机甲烷泄漏巡检平台适用性的研究
2022-02-16王佳楠王晓霖魏惠梅
王佳楠,王晓霖,魏惠梅
(1. 中国石化大连石油化工研究院,辽宁大连 116045 2. 大连科技学院,辽宁大连 116052)
1 无人机甲烷遥测技术概述
无人机甲烷泄漏巡检平台(以下简称“巡检平台”)是由无人机、云台、甲烷遥测仪、地面站组成的综合监控系统,旨在应用于油气管道沿线的甲烷泄漏监测。诸多学者对此进行深入的研究。边正东[1-2]以互联网、物联网、智能机械为载体,考虑将无人机监测技术运用到燃气管网巡检中,实现管网泄漏预报、预判。袁喆[3]详细描述无人机线路视觉跟踪技术、遥感图像处理技术和激光遥测技术在燃气管道巡线的应用。李亚军[4]阐述无人机技术发展现状及系统组成,并对无人机技术在应用领域、技术性能、服务市场需求等方面应用前景进行分析。许振裔[5]对燃气管网日常巡检作业中使用的无人机类型进行介绍,并对巡检作业中无人机及其系统的主要构成和具体应用进行深入分析。王国栋[6]使用无人机载激光燃气巡检系统对燃气管道穿越建筑物泄漏点巡检,具有灵敏度高、快速查找泄漏点、操作方便、使用灵活等优点。
2 巡检平台性能测试实验设计
本次实验的主要目的是对巡检平台总体性能进行测试,主要包括无人机平台稳定性及指向性、甲烷遥测仪性能测试等几个方面。根据实验结果,可以对巡检平台进行较全面的评估,为进一步优化系统的整体性能提供指导。
2.1 实验设备及条件
实验设备包括:巡检平台1台;标准浓度甲烷气体4瓶,体积浓度分别为0.08‰,0.04%,0.1%,2.02%;激光测距仪1台;手持式激光甲烷遥测仪1台。同时,设计加工透明空间气室1个,直径0.6 m,高度0.25 m。激光气体浓度检测仪示数为在单位长度激光检测线上累积的气体浓度,其指示单位通常用ppm·m表示,即10-6·m。故在高度为0.25 m气室内充入0.08‰,0.04%,0.1%,2.02%的甲烷气体,其在激光甲烷遥测仪上的示数分别为20.25×10-6·m,100.25×10-6·m,251.25×10-6·m,5 050×10-6·m。
测试现场温度范围1~6℃,气压101.325 kPa,相对湿度变化范围36%~61%,风速2~8 m/s。将测试目标地点与无人机的连线与水平面夹角称为控制云台俯角。
2.2 实验内容及方法
2.2.1 巡检平台稳定性和指向性测试
令无人机悬停高度分别为100,50,20,10 m,控制云台俯角为90°,测试巡检平台发出的指示光斑在1 min内的最大漂移距离。每个悬停高度测试3次。
令无人机悬停高度50 m,控制云台俯角分别为90°,70°,50°,30°,测试相邻两个控制云台俯角之间指示光斑的水平距离,同时测试不同控制云台俯角下指示光斑在1 min内的最大漂移距离。每个控制云台俯角测试3次。测试示意图如图1所示。
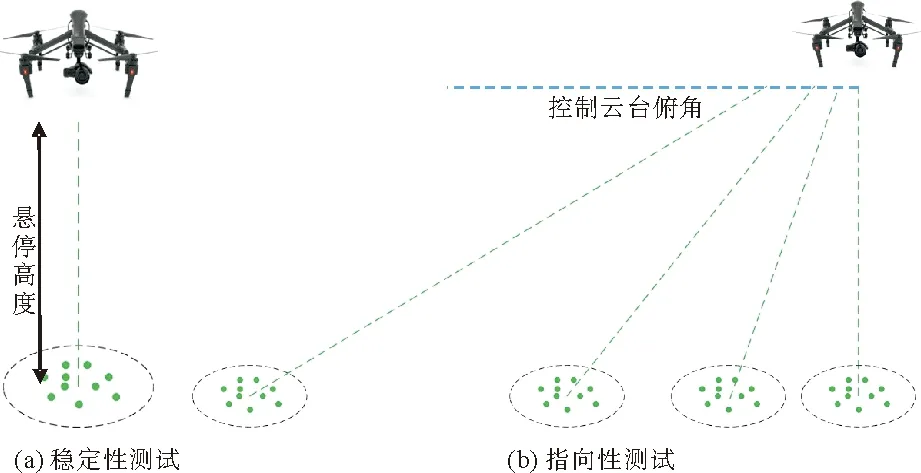
图1 巡检平台稳定性与指向性测试示意
2.2.2 甲烷遥测仪性能测试
在直径0.6 m,高度0.25 m的气室中分别充入浓度为0.08‰,0.04%,0.1%,2.02%的甲烷标准气体,令无人机悬停高度分别为100,80,60,40,20 m,控制云台俯角为90°,测试不同浓度标准气体下甲烷遥测仪响应的最远探测距离。每个悬停高度、每个甲烷标准气体浓度连续测试1 min。测试过程中为消除无人机稳定性对测试结果的影响,通过移动气室,尽可能保证指示光斑始终位于气室区域内。
以一定流速连续向自由空间中喷洒浓度为30%和70%的甲烷标准气体,控制无人机以一定的飞行速度和飞行高度飞过泄漏区域,获得不同浓度下的测试数据。
3 巡检平台性能测试实验结果与分析
3.1 稳定性和指向性测试结果
3.1.1 稳定性测试结果及分析
无人机系统稳定性测试结果如表1所示。光斑漂移距离测试结果受测试环境影响较大,当测试过程中存在较大阵风时,无人机本身为维持平衡会产生较大幅度的姿态调整,从而使入射到地面的指示光斑产生较大的漂移。在悬停高度小于等于100 m时,指示光斑的漂移距离受无人机悬停高度的影响不大。在测试期间,环境风速变化范围约为0~3.3 m/s,在该环境条件下3次测试得到的指示光斑在1 min内最大漂移距离的平均值随无人机悬停高度变化如图2所示,最大漂移距离为1.08 m。
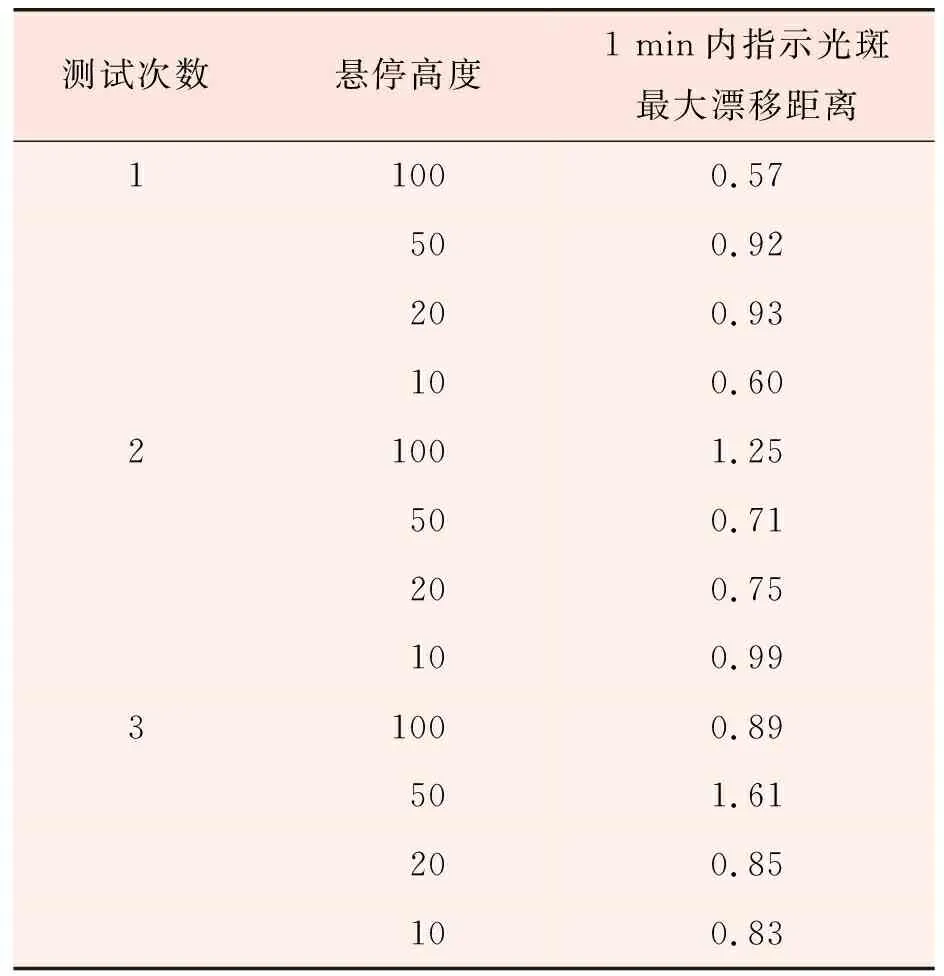
表1 巡检平台稳定性测试结果 m
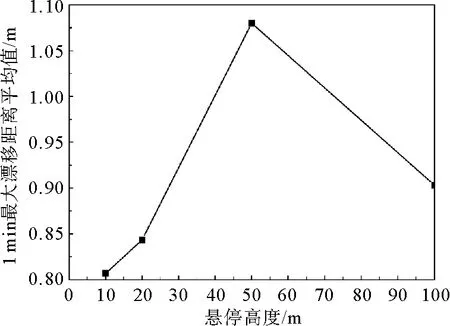
图2 指示光斑漂移距离平均值随无人机悬停高度变化情况
3.1.2 指向性测试结果及分析
巡检平台指向性测试结果如表2~表4所示。表2为控制云台俯角变化时相邻两个控制云台俯角之间指示光斑的水平距离测量值。无人机悬停高度为50 m,可计算得到控制云台俯角分别设置为90°,70°,50°,30°时,不同控制云台俯角之间指示光斑的水平距离变化理论值分别为18.2,23.75,44.65 m,由此可以计算得到测量值与理论计算之间的相对误差均小于5%,表明无人机平台具有较好的指向准确性。
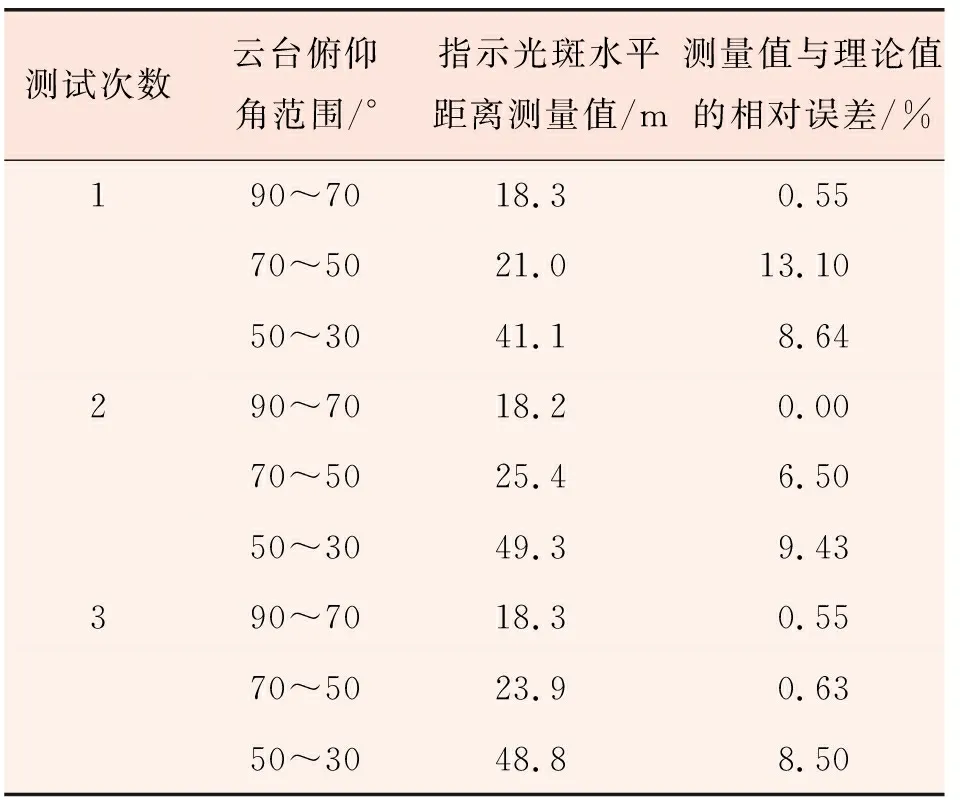
表2 巡检平台指向性测试结果1
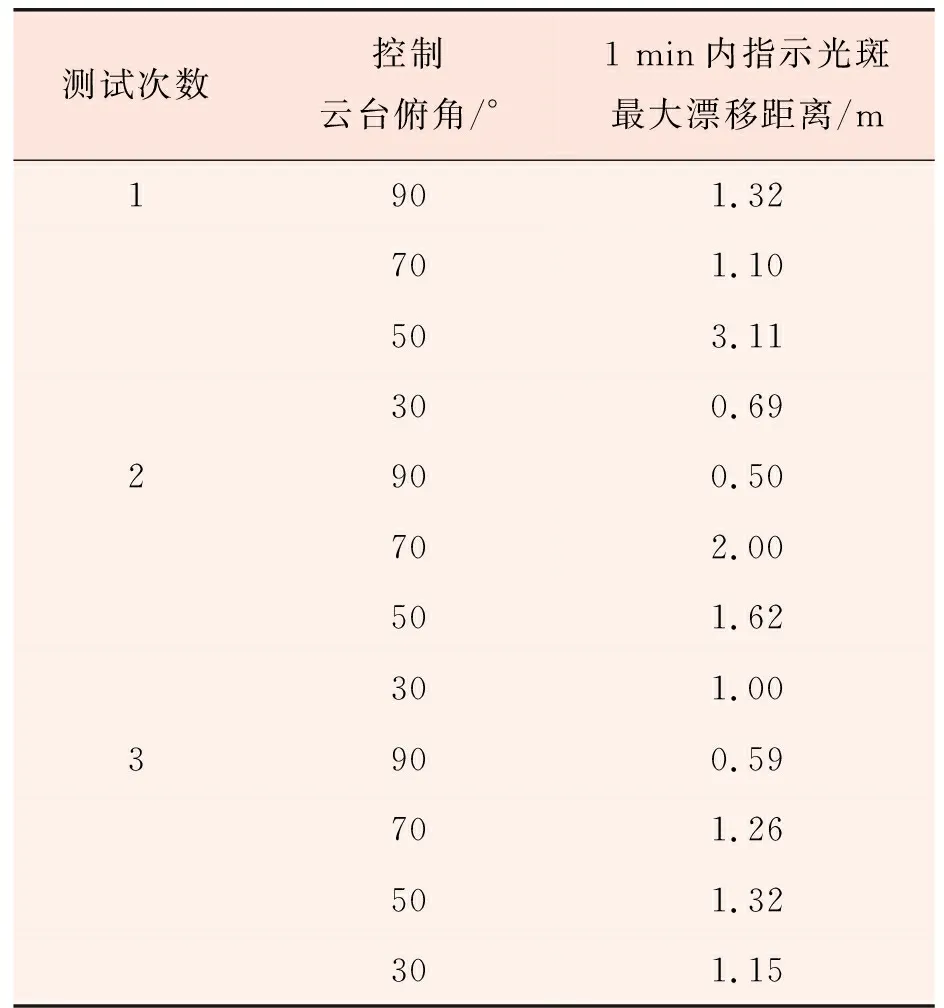
表3 巡检平台指向性测试结果2
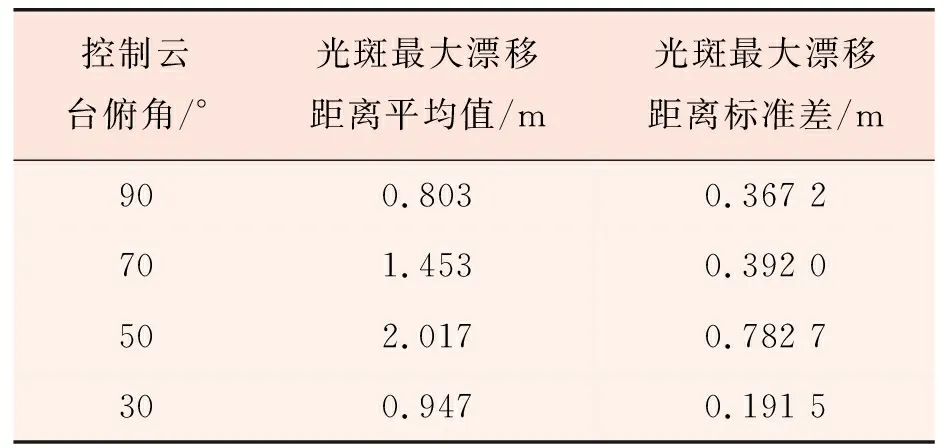
表4 巡检平台指向性测试结果3
表3、表4分别为不同控制云台俯角下指示光斑在1 min的最大漂移距离测试及统计分析结果。理论上,其稳定性与指向角度存在一定关系,指向角度越小,指向稳定越差,但并不绝对呈正相关关系。与稳定性测试相似,指向性测试结果同样受环境因素影响较大,随机的较强阵风会极大地影响测试结果。由表4中3次测试结果的平均值及标准差可以看到,不同次测量结果之间标准差较大,与本文分析相符。
3.2 甲烷遥测仪性能测试结果
3.2.1 不同浓度甲烷气体静态测试
使用甲烷遥测仪对气室中不同浓度的甲烷标准气体进行测试,不同标准气体浓度、不同悬停高度下连续1 min内的测试结果如图3~图6所示。
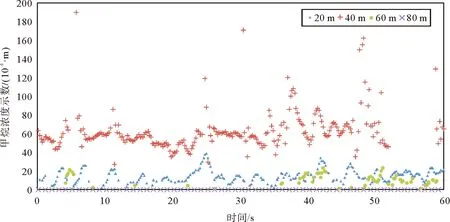
图3 气室中标准气体浓度为0.08‰(20.25×10-6·m)时不同悬停高度下甲烷浓度测试结果
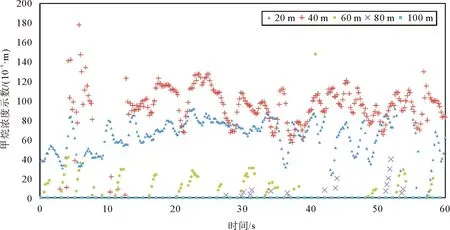
图4 气室中标准气体浓度为0.04%(100.25×10-6·m)时不同悬停高度下甲烷浓度测试结果
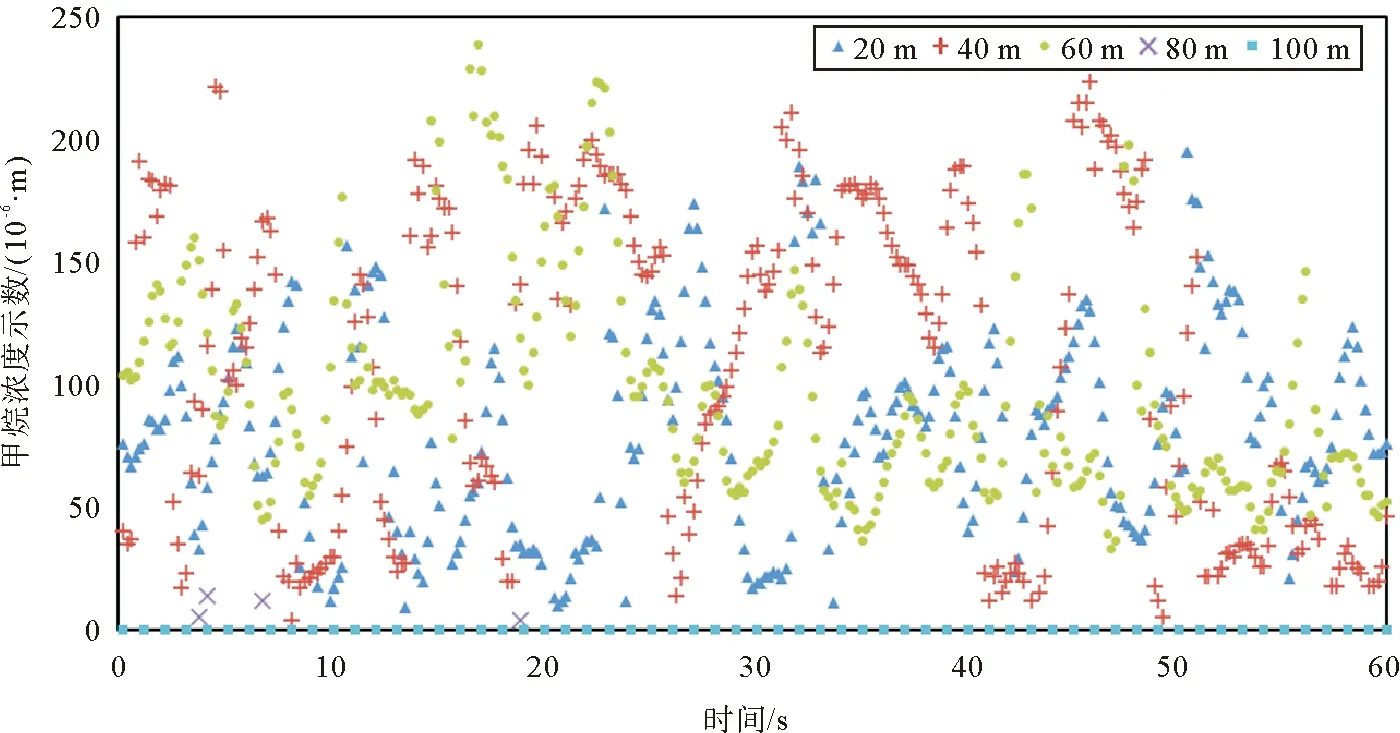
图5 气室中标准气体浓度为0.1%(251.25×10-6·m)时不同悬停高度下甲烷浓度测试结果
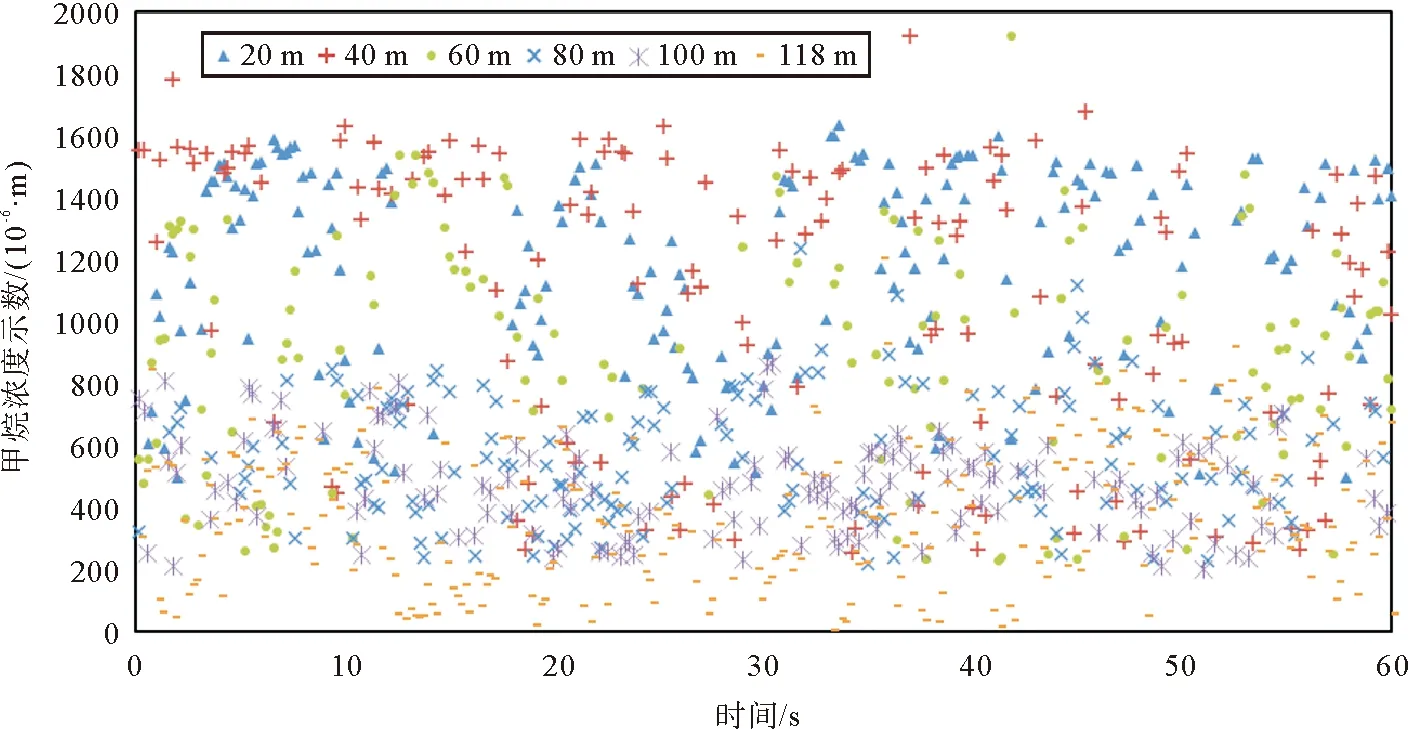
图6 气室中标准气体浓度为2.02%(5 050×10-6·m)时不同悬停高度下甲烷浓度测试结果
由于气室的有效测试区域直径仅0.6 m,受无人机稳定性的影响,在测试过程中甲烷遥测仪探测光束入射到地面上的位置会随时间变动。为尽可能保证甲烷遥测仪探测光束的入射位置落在气室有效检测区域,在测试过程通过人工移动气室,确保检测结果的可靠性。
然而受环境、人工操作随机性和实际探测激光偏离指示激光等因素的影响,在测试过程中无法完全避免遥测仪检测激光偏离气室有效检测区域的情况,因此在利用甲烷遥测仪连续1 min内的检测数据对巡检平台的性能进行评估时,主要遵循以下原则:当测试结果中0的占比小于40%时,甲烷遥测仪在该条件下的检测数据具有一定的参考性,去除结果为0的无效数据后,计算平均值和标准差;当检测结果中0的占比大于40%小于70%时,甲烷遥测仪在该条件下有响应但检测结果不具有参考性,当检测结果中0的占比达到70%时,该条件下系统达到响应极限;当检测结果中0的占比大于70%时,则认为甲烷遥测仪无响应。
由探测结果可知,当气室中甲烷浓度为0.08‰和0.04%时,甲烷遥测仪的响应检测距离在40~60 m;当气室中甲烷气体浓度为0.14%时,甲烷遥测仪的响应检测距离在60~80 m;当气室中甲烷气体浓度为2.02%时,甲烷遥测仪的响应检测距离大于100 m。对所有测试条件下0占比小于40%的检测结果进行计算,结果如表5所示。从表5中可以看到,测量结果与实际结果存在较大偏差,同一浓度不同高度下的测试结果也存在较大差异,同一高度同一浓度下的持续测试结果之间也有较大偏差,但不同浓度下的测试值与实际浓度值的变化趋势是正相关的,表明甲烷遥测仪的测试结果虽然准确性较差,但在一定程度可以反映检测区域甲烷浓度的高低。通过对测试过程进行分析,影响检测结果准确性的原因如下。
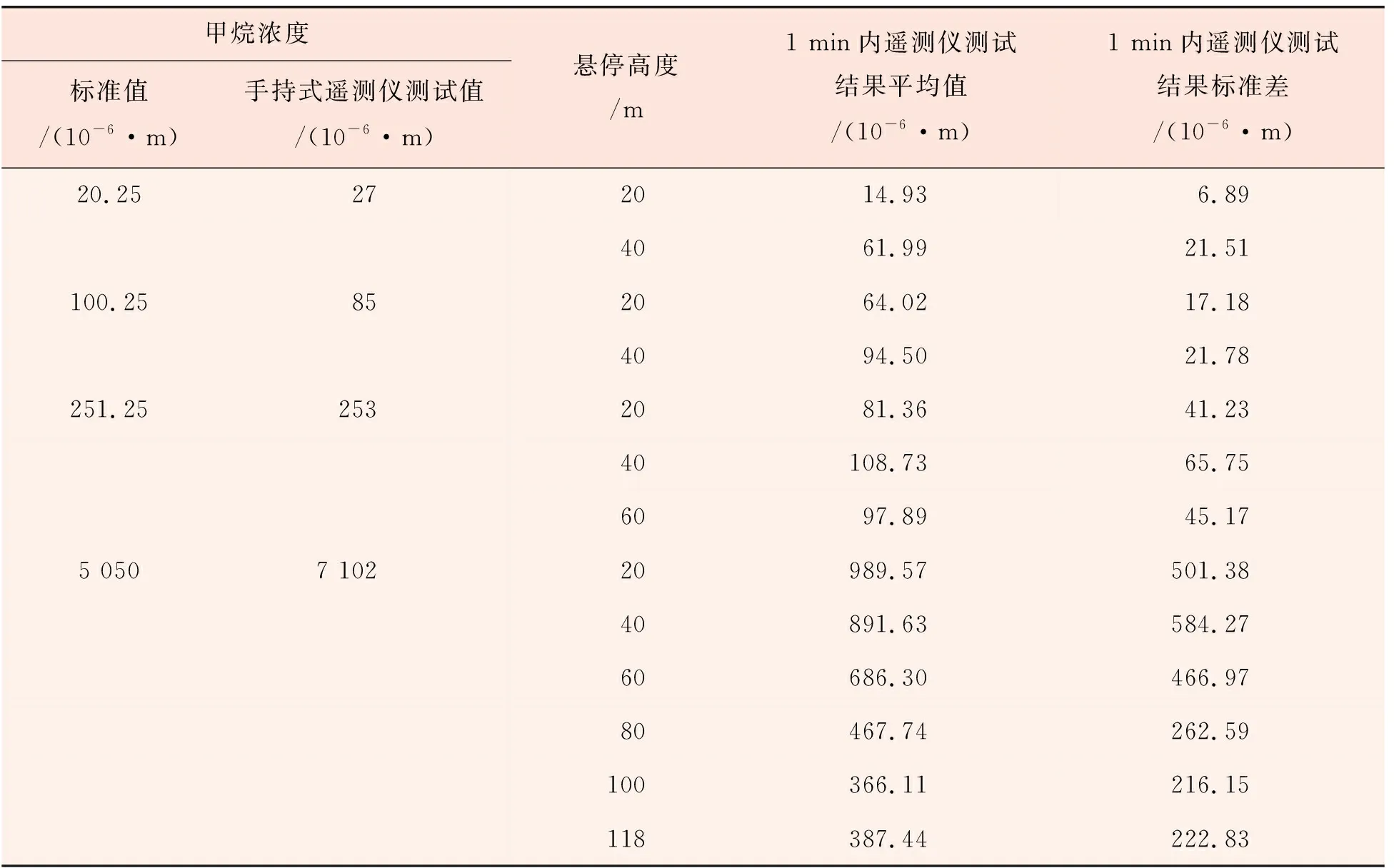
表5 巡检平台载甲烷遥测仪静态测试结果
a) 大气湍流影响:由于实验测试环境为开放大气自然环境,大气层在气压差的影响下一直处于流动状态,大气中的微小颗粒会对激光光强产生动态的散射作用,从而导致探测器接收光强产生波动,影响浓度反演结果。
b) 低温影响:甲烷遥测仪是基于甲烷分子的吸收光谱特征,利用特定波长范围内的吸光度变化或吸光度变化导致的非线性二次谐波变化实现对浓度的检测,由于气体吸收光谱线强与温度有关,因此温度的变化也会导致浓度反演结果出现偏差。
c) 干涉影响:甲烷遥测仪探测过程中,激光光束依次通过激光器窗口片、遥测仪保护窗口片、气室上表面、气室下表面、背景地面,聚焦透镜、探测器窗口片等界面,在任意界面处均会发生反射,当不同界面反射光在探测芯片处产生空间交叠时会产生干涉作用,从而导致探测信号产生周期性振荡,严重影响浓度检测结果的准确性。
d) 系统振动噪声影响:无人机挂载甲烷遥测仪始终处于动态平衡,在系统振动噪声的影响下,遥测仪上的光学结构和电路系统也会受到影响,从而影响检测结果的准确性。
e) 大气背景辐射及光束背景反射的影响:探测接收到的光强信号是各个方向光强信号的总和,包含环境背景光强信号和激光束经背景反射后的光强信号。此外,由于指示激光不能完全反映探测激光光束的状态,在测量时聚焦透镜收集到的光束中可能仅有部分光束穿过甲烷气体。由此导致基底信号“虚假”偏大,致使计算得到的吸收光度变小,从而导致浓度检测结果向比实际值小的方向偏离。
3.2.2 甲烷气体泄漏动态测试
模拟甲烷泄漏检测环境,向大气中分别喷洒浓度为30%和70%的甲烷气体,无人机挂载甲烷遥测仪从空中对地面上泄漏的甲烷气体进行检测。先以6 L/min的流速持续向大气喷洒标准浓度的甲烷气体5 min,然后控制无人机起飞进行测试,测试过程中无人机位于甲烷泄漏区正上方,悬停高度为15 m,甲烷遥测仪垂直向下进行测试,测试现场风速最高可达6 m/s,无人机悬停测试数据如图7(a)所示。
虽然测试现场风速较大,造成大气环境中甲烷浓度稀释较为严重,但由于用于测试的甲烷标准气体浓度较高且释放流速较大,甲烷遥测仪在模拟泄漏的开放大气环境中可以灵敏地检测到泄漏的甲烷气体。
设置无人机巡航速度为5 m/s,飞行高度为15 m,对泄漏区域进行巡航测试,连续往返3次不同甲烷浓度下的巡航测试数据如图7(b)所示。
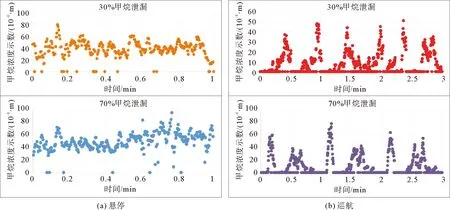
图7 泄漏甲烷浓度为30%、70%时,巡检平台悬停和巡航测试结果
由于甲烷气体从模拟泄漏点处不间断地向大气中喷洒,理论上而言,随着测试时间的推移,环境中甲烷气体的浓度应该以泄漏点从中心向四周呈递减分布,且浓度应该越来越高,但是受测试现场环境和风力影响,泄漏出来的甲烷气体扩散速度极快,因此甲烷遥测仪只能在泄漏点附近检测到较高的甲烷浓度,与实验测试结果一致。
4 结论
a) 无人机在悬停模式时具有较好的稳定性,当环境风速变化范围约为0~3.3 m/s时,测试得到的不同悬停高度下的最大漂移距离平均值小于1.08 m。
b) 无人机平台具有较高的指向准确性,连续控制云台俯角下测试结果的平均值与理论值的相对误差小于5%,不同控制云台俯角下1 min内最大漂移距离平均值小于2.02 m。
c) 利用气室,对不同浓度的甲烷标准气体进行检测时,受大气湍流、温度、干涉、系统振动噪声、大气背景辐射及光束背景反射等多种因素的影响,无人机甲烷泄漏检测平台的检测结果准确性较差,但依旧在一定程度上能反映检测区域甲烷浓度的高低。
d) 该巡检平台对浓度为20×10-6·m的甲烷浓度有响应,同时系统的最远探测距离大于100 m。
e) 利用浓度为30%,70%的甲烷标准气体开展泄漏测试,无人机载甲烷遥测仪在悬停测试和巡航测试下都取得较好效果。因此,对于高浓度的甲烷泄漏应用场景,甲烷遥测仪可以有效地实现对泄漏区域的定位与监测。