基于单自由度参数激励模型的车辆随机振动分析
2022-02-16朱大鹏薛如壮曹兴潇
朱大鹏, 薛如壮, 曹兴潇
(1. 兰州交通大学 交通运输学院,兰州 730070; 2. 兰州交通大学 机电工程学院,兰州 730070)
包装件在运输过程中会受到各种冲击、振动、静压力等载荷的作用,在这些载荷作用下,产品可能发生各种形式的损坏。为保护包装件中的产品,需进行合理的包装设计。在各种载荷中,跌落冲击载荷强度大,很容易造成产品的损坏,因此,国内外研究者在跌落冲击条件下针对包装件的动态响应、确定破损边界等领域开展了一系列研究[1-5]。除了跌落冲击载荷外,包装件在运输过程中,长时间受到运输车辆中随机振动载荷的作用,在随机振动载荷条件下,包装件中产品可能出现首次穿越损坏、疲劳破坏等。为提高包装件在随机振动载荷条件下的振动可靠性,减少因振动造成的包装件中产品的损坏,需研究包装件流通过程中随机振动的特点,分析包装件在随机振动载荷条件下的响应,并进行包装件优化设计。其中,运输过程车辆中产生的随机振动的分析和模拟是分析包装件振动响应和包装件设计优化的重要基础,是运输包装领域的一个研究热点。
为准确模拟包装件流通过程中的随机振动,国内外研究者对各国车辆中的随机振动进行了采集和分析,建立了能反映这些随机振动基本特征的实验室测试方法[6-9],为包装测试和包装设计提供了依据。由于采集到的随机振动具有明显的非高斯、非平稳特性,而传统的基于功率谱密度(或自相关函数)和二阶矩的随机振动模拟方法不足以准确表征随机振动的非高斯、非平稳特性。车辆在行驶过程中,由于载荷具有随机性,车辆自身特性具有随机性,这些随机因素在一定条件下可能会触发车辆的振动响应离开平稳状态,短时间地进入不平稳状态,形成较大的瞬态振动幅值。这些大幅值的瞬态振动和平稳随机振动叠加,总体上在车辆中形成了非高斯、非平稳随机振动。这些大幅值的瞬态振动出现的概率虽然比较低,但它们对包装件的安全影响很大,不能忽略它们的影响。近年来,随机振动的非高斯、非平稳特性的分析和模拟引起了国内外研究者的关注。
Lepine等[10-12]分析了包装件流通过程中随机振动的非高斯、非平稳特性,构建了该随机振动的模拟方法。蒋瑜等[13-14]建立了非高斯随机振动模拟方法,旨在分析和优化产品运输过程中的可靠性。朱大鹏等[15-16]采用多项式混沌扩展法建立了平稳非高斯随机振动的数值模拟方法,利用该方法可生成给定的高阶矩条件下的非高斯随机振动。Geroulas等[17-18]基于模拟法分别研究了在非高斯平稳随机振动条件下振动系统的时变可靠性和疲劳寿命。非线性变换法是生成非高斯随机振动的一种重要方法,该方法对高斯随机过程进行非线性变换,生成符合要求的非高斯随机过程[19]。该方法的核心在于求解非线性变换,通常根据随机过程的谱密度函数[20]或自相关函数[21],采用迭代法求出符合约束条件的非线性变换。以上的模拟和分析方法考虑了真实环境中随机振动的非高斯、非平稳特性,为系统的响应分析和优化奠定了基础。但这些非高斯、非平稳随机振动的模拟方法是基于数值模拟的,对随机振动的非平稳非高斯特性出现的机理的分析较少,利用这些数值方法生成随机振动,并对包装件等振动系统进行响应分析和系统优化时,分析时间长,计算效率低,尤其是分析包装件振动可靠性时,由于失效概率是一个低概率事件,基于数值模拟的系统优化很不现实。
本文考虑了铁路车辆中的随机振动的非平稳、非高斯特性,采用参数激励系统模拟车辆在平稳运行时的加速度响应。用Mathieu方程分析车辆运行时在外界激励条件下的加速度响应,分析车辆响应的失稳条件,分别研究车辆在稳态条件、失稳条件和衰减条件下的加速度响应,构建根据采集的振动数据识别参数激励系统中参数的方法。论文给出了一个实例介绍了系统振动响应分析方法和模型参数识别方法。应用本文构建的车辆模型可高效准确地再现出车辆中非平稳、非高斯随机振动数据,为包装件振动响应分析和包装件优化奠定基础。
1 铁路车辆参数激励振动方程
铁路车辆在线路上平稳运行时,虽然外界随机振动激励属于低幅值平稳激励,但车内也会时常产生大幅值的振动响应。考虑到参数激励系统有类似的特性,即当系统发生参数共振时,即使参数激励的幅值很小,系统也会产生很大的响应。可采用Mathieu方程描述单自由度参数激励系统特性
(1)

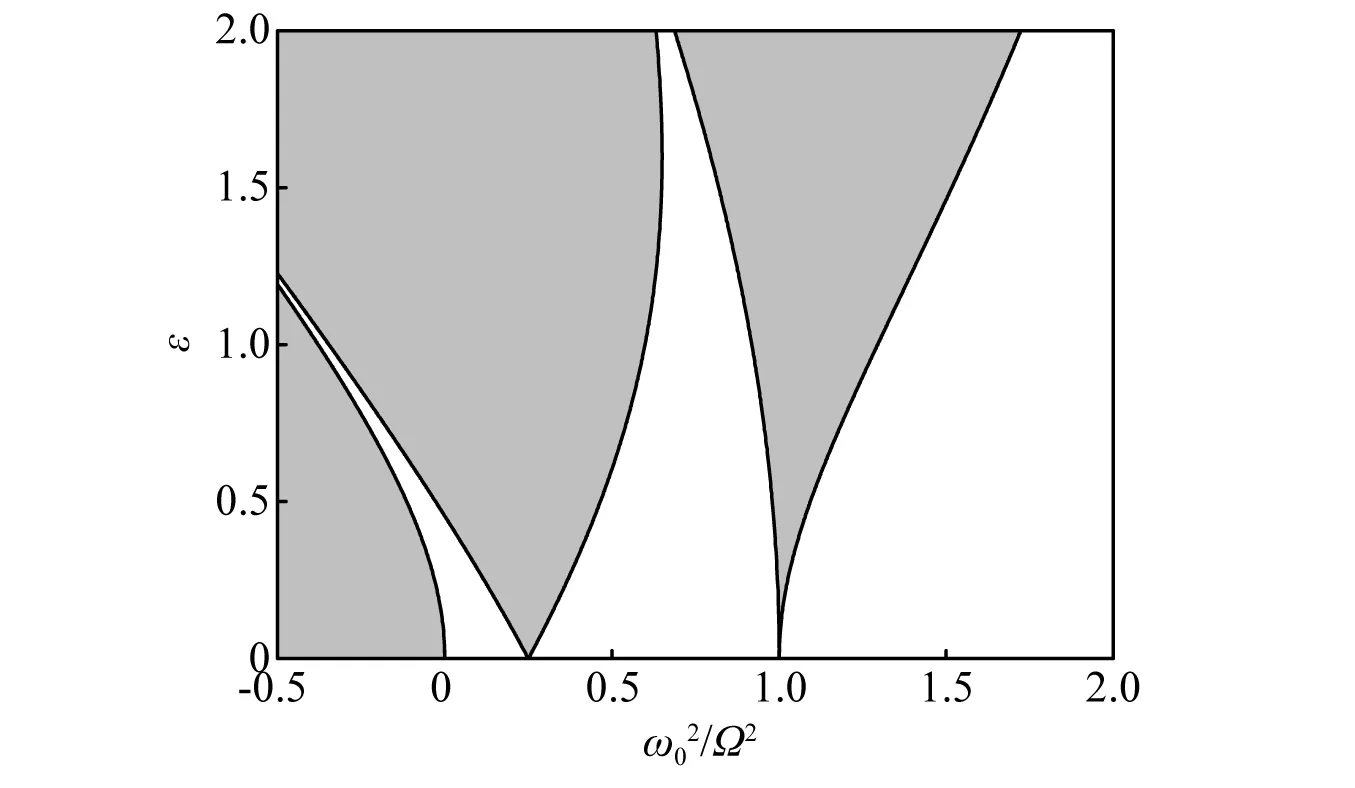
图1 Mathieu方程的稳定和不稳定区域Fig.1 Stability and instability region of Mathieu equation
基于以上的分析,本文采用一个参数激励振动系统分析和模拟铁路车辆的振动响应。当铁路车辆运行在线路上时,由于路面不平度的影响,车辆运行受到外界随机振动激励的作用,当车辆上部的车体产生点头运动或发生左右侧向随机振动时,车体和转向架之间的弹性连接会产生局部脱离,造成车辆振动过程中的弹性力产生随机变化,不考虑车辆非线性弹性力,车辆垂向弹性力可用式(2)表示
(2)
式中:z为车辆的车体垂向变形量;ω0为车辆模型的固有频率;α(t)为一个表征车辆垂向弹性力随机变化的窄带随机过程。假定车辆垂向阻尼是一个常数,则车辆垂向运动方程可用一个参数激励方程表示
(3)


图2 用于车辆响应分析的单自由度参数激励系统Fig.2 SDOF parametric excitation system for vehicle response analysis

(4)

本文围绕式(4)展开分析,研究该参数激励系统在平稳随机激励下的失稳条件、系统响应,采用该分析模型模拟铁路车辆的垂向加速度振动响应。
2 系统稳定性分析
令z(t)=λ(t)cos[ω0t+φ(t)],为便于计算,对式(4)所表示系统的响应z(t)进行变换[25]
z(t)=λ1(t)cos(ω0t)+λ2(t)sin(ω0t)
(5)
求导可得
(6)

(7)
由于
(8)
将式(5)、式(7)和式(8)代入式(4),分析可得

应用随机平均法,保留式中慢随机变量,以上两式可简化为
(9)
(10)

根据式(10)可知:当|β(t)|<4ζ时,系统处于稳定状态;当|β(t)|>4ζ时,系统失稳。在平稳随机激励条件下,车辆会出现大幅值振动响应,如图3所示。

图3 典型的和β(t)的模拟结果Fig.3 Typical simulation of and β(t)
3 系统特性分析
式(10)可统一表达为
(11)

γ(t)=ζω0-σβω0ξ(t)/4
(12)
式中,ξ(t)为标准正态随机过程。
3.1 稳态条件下系统特性分析
根据式(11)、式(4)所示的车辆系统处于稳态的基本条件为
γ(t)>0
(13)
根据式(12),系统处于稳态的概率为Φ(η),其中:Φ为标准正态变量的累积概率分布函数;η=4ζ/σβ。
在稳态条件下,可用下式近似代替车辆垂向振动方程
(14)
其中,

(15)
式中,函数φ为标准正态变量的概率密度函数。根据式(15)计算κ的条件数学期望,可得
(16)

(17)

(18)

3.2 系统失稳响应分析
根据式(11),当γ(t)<0时,系统失稳。在失稳条件下,由于外界随机激励对系统响应影响很小,在式(11)中,可不考虑激励的影响[30],分析可得
z(t)≈|z|cos[ω0t+φ(t)]=
z0exp(-γt)cos[ω0t+φ(t)], 0≤t≤Tγ<0
式中:z0为系统稳态响应z的轮廓线幅值;Tγ<0为系统处于失稳状态所持续的时间。由于在失稳条件下忽略激励的影响,相似地,车辆失稳时的加速度响应为

(19)

根据式(12)的定义,分析可得在系统失稳时-γ(t)的条件概率密度函数为
(20)
根据该条件概率密度函数可得-γ(t)的条件均值
根据式(11),在单位时间(1 s)内,系统响应出现失稳的次数N即为随机过程γ(t)穿越0的次数,根据Rice公式,N可由式(21)确定[31-32]
(21)
式中,R″β为β的自相关函数的二阶微分。因此,系统失稳状态持续的平均时间为
式中,P[·]为事件的发生概率。
由于车辆发生失稳的概率较低,应用渐进估计法,系统失稳事件中,失稳所持续时间的概率分布函数可用下式近似表达
(22)
在式(19)中,令系统加速度响应的外包线为U,即
(23)
式中,Λ=-γ,并令Y=Λ,则有
fUY(u,y)=fΛT(λ,t)|det[∂(λ,t)/∂(u,y)]|
假定随机变量Λ和T互相独立,则式(23)所示的系统加速度响应的外包线U的概率密度函数为
(24)
将式(20)和式(22)代入式(24)中,可得
在式(19)中,用一个均匀分布近似估计cos[ω0t+φ(t)]的概率分布,系统加速度响应的概率分布可用式(25)表达
(25)
3.3 系统衰减响应阶段分析

(26)

(27)
(28)
式中,Tdc为系统由响应峰值衰减至稳态所经历的时间。由于γ(t)呈正态分布,分析可得γ(t)>0时的均值为
根据式(24)及式(25),可得
(29)
在衰减阶段,系统的加速度响应为

(30)
从图3中可以看出,由于在系统的失稳阶段和衰减阶段,加速度响应的外包线的值具有一一对应关系,故可认为衰减阶段的响应和失稳阶段的响应具有相同的概率密度函数。
3.4 参数激励系统响应分析总结
车辆在运行时,即使受到平稳小幅值激励,车辆也经常出现大幅值的振动响应,虽然出现大幅值响应的概率较小,但这些大幅值振动响应对于包装件的安全影响很大,此时可用式(4)所示的参数激励系统分析和模拟车辆的振动响应。记录车辆运行过程中的加速度振动响应,响应数据中包含平稳随机振动响应部分和大幅值响应部分。分析在铁路车辆中采集到的非平稳非高斯随机振动数据,采用式(4)构建车辆动态特性模型,则该模型的参数可通过以下步骤进行识别:


步骤3根据η的定义和识别出的ζ,求得σβ,根据式(16),可求得参数ω0;
步骤4对记录的加速度数据进行分析,分析系统失稳次数,根据式(20)及对自相关函数Rβ函数的假定,可得参数l。

步骤1根据识别的σβ和参数l,建立随机过程β(t)的自相关函数,根据自相关函数构建随机过程β(t)[33];
步骤2分析随机过程β(t),当β(t)>4ζ或β(t)<-4ζ[γ(t)<0]时,系统失稳并产生大幅值的加速度响应,这也是车辆产生非平稳非高斯随机振动的内在根本原因,大幅值加速度响应所持续的时间为Tγ+Tdc,当0≤t≤Tγ时,系统加速度响应用式(19)模拟,当Tγ≤t≤Tγ+Tdc时,系统加速度响应用式(30)模拟;

(31)
根据式(31)计算所得的自相关函数模拟车辆在稳态条件下的加速度响应。
4 实例分析
本文采集了铁路车辆运行过程中车内加速度振动数据,车辆型号为P70,剔除车辆在编组连挂、进站停车、起动等阶段的振动数据,只保留车辆平稳运行时的加速度响应数据。采集的加速度数据PSD曲线,如图4所示。

图4 记录的振动数据的PSD曲线Fig.4 PSD of the recorded vibration data
从采集的时域振动数据中可以看出,车辆在平稳运行时,车辆加速度响应中存在一些大幅值的振动响应,这使车辆的加速度振动响应整体呈现出非平稳非高斯特性。本文采用式(4)所代表的参数激励系统对车辆动态特性建模,根据采集到的的加速度响应数据以及3.4节中介绍的参数识别方法分析式(4)中的参数,识别结果如表1所示。
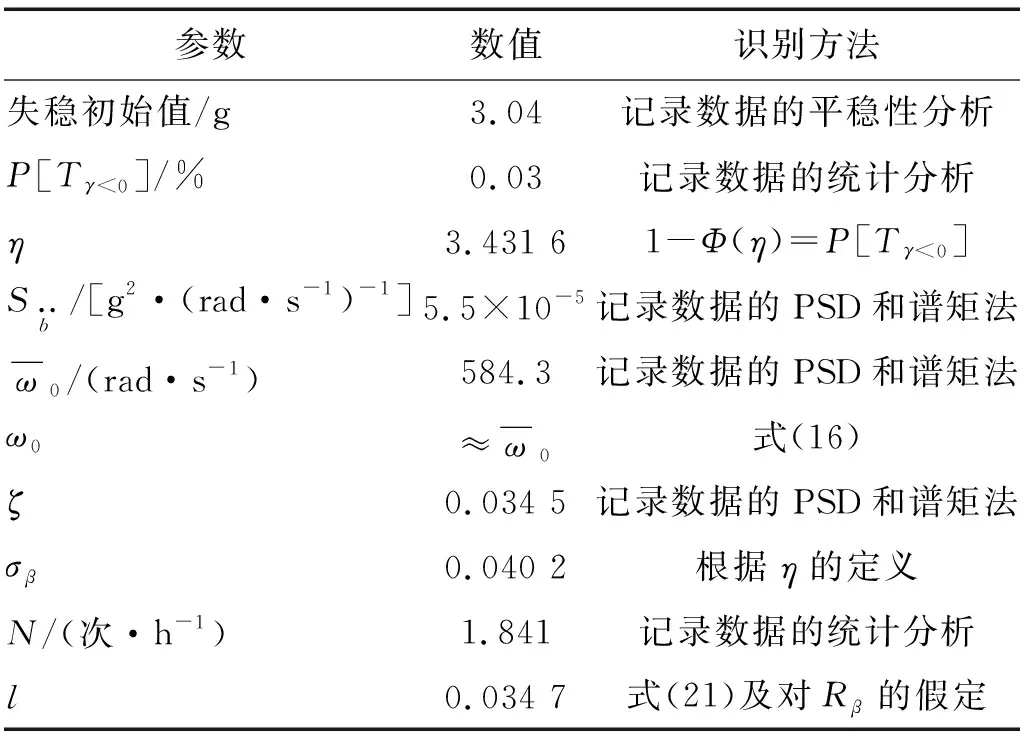
表1 识别出的参数激励系统的参数Tab.1 Parameters of parametric excitation system

为验证本文提出的车辆随机振动模拟方法的准确性,本文截取3 h的试验数据和模拟数据进行分析,试验结果和模拟结果的PDF对比,如图5所示。图5中给出了平稳阶段呈正态分布的PDF曲线,从图5中可以看出,车辆参数激励失稳会造成车内较大的振动加速度响应,仅考虑平稳阶段的随机振动是不准确的,本文采用的基于单自由度参数激励振动模型的模拟方法可准确再现真实的包含有大幅值响应的随机振动。其中,分析模拟数据的PDF时,可将模拟数据分为三部分考虑:平稳阶段的数据、失稳阶段的数据、衰减阶段的数据,用全概率原则分析模拟数据的总体PDF。

图5 试验数据和模拟数据的PDF对比Fig.5 PDF comparison of the experimental data and simulation data
f(q)=Pstafsta(q)+Pinstfinst(q)+Pdecayfdecay(q)
(32)
式中:Psta,Pinst和Pdecay分别为平稳阶段、失稳阶段和衰减阶段出现的概率;fsta,finst和fdecay分别为系统平稳阶段、失稳阶段和衰减阶段加速度响应的概率密度函数。其中
Pinst=P[Tγ<0]=1-Φ(η)
(33)
根据式(29)可得
(34)
则平稳阶段概率为
Psta=1-Pinst-Pdecay
(35)
系统稳态响应条件下的加速度响应的概率密度函数可由式(18)确定,从系统响应外包线分析,由于系统在失稳阶段和衰减阶段存在一一对应关系,可认为系统失稳阶段和衰减阶段具有相同的概率密度函数,因此finst和fdecay均可由式(25)确定。
根据以上的分析,将式(33)~式(35)以及式(18)和式(25)代入式(32),可得模拟的系统响应的概率密度函数,如图5中实线所示。从图5中可以看出,采用本文的参数激励模型模拟出的车辆加速度数据的概率密度函数和试验记录的加速度数据的概率密度函数具有良好的吻合度。从时域数据分析,试验记录的响应数据最大可达7.2g,模型模拟的数据可较好地再现出这些幅值较大的响应数据,而如果采用传统的高斯模型模拟方法,最大响应数据为3.7g。这表明,本文采用参数激励系统模拟真实的车辆加速度响应具有良好的准确度。
5 结 论
本文采用单自由度参数激励系统模拟车辆运行时车内的随机振动,基于Mathieu方程分析了系统的失稳条件,建立了系统的加速度响应的分析方法,通过对比模拟数据和试验数据的时域特点和的概率密度函数,采用本文的模拟方法可准确模拟铁路车辆车内的加速度信号。主要结论如下:
(1) 基于Mathieu方程的参数激励系统的失稳条件为|β(t)|>4ζ,当随机过程β|(t)|<4ζ时,系统响应为平稳高斯随机过程,当随机过程满足失稳条件时,系统失稳,车内出现大幅加速度响应,当随机过程恢复至β|(t)|<4ζ时,系统从大幅响应的峰值衰减至平稳状态。
(2) 从系统失稳条件分析,为避免车辆内出现瞬态大幅值加速度响应,应提高车辆垂向阻尼ζ,或提高车辆质量,尽量减小出现参数激励因素β(t)的波动。
(3) 在具有参数激励因素的车辆中,即使在平稳运行条件下,车内也有可能出现较大的振动响应,尽管大幅振动响应出现的概率较小,但对包装件的运输安全具有较大的影响,必须予以考虑。
应用本文提出的参数激励模型模拟车内的加速度振动,结果与试验采集的车内加速度振动数据在时域特征、概率密度分布方面相符。该模型是包装件振动可靠性分析和优化的基础,提供了一种应用分析法高效研究包装件振动安全的手段。
