冗余六自由度并联隔振平台多维隔振性能研究
2022-02-16蔡佳敏蒋子良朱方正汤少东钱鹏飞
张 兵, 黄 华, 蔡佳敏, 蒋子良, 朱方正, 汤少东, 钱鹏飞
(江苏大学 机械工程学院,江苏 镇江 212013)
高端精密设备在动态环境下(如舰载、机载、车载等)凭借其灵活性好、可靠性高和适应性强等特点,被广泛应用在军事、国防以及民用设施等领域,如舰载雷达、舰载武器系统等。但是动态载体下的精密设备在工作或转场中会受到各种环境振动的影响,导致其寿命和精度被降低,严重时甚至造成设备因共振而失效[1-2]。因此,在设备工作过程中必须采取措施对其受到的振动进行有效的隔离和缓冲,降低环境振动对设备产生的影响,从而保证设备在所处工况下能够稳定而可靠地正常工作。在工程实际应用中,尽管很多复杂的精密设备在产品设计阶段已经采取了一定的防振措施,但是这种减振方法已经无法满足需求,振动抑制效果不明显。为了促进动载设备的发展,必须综合其相关设计参数和使用工况等因素,开发合适的隔振系统。
随着计算机水平和电子科学技术水平的不断提高,隔振对象的研究已从简单的刚体发展为复杂的可变柔性体[3];隔振元件的研究已经从阻尼弹簧的被动隔振到磁流变的半主动隔振再到各种智能作动器的主动隔振[4];隔振系统的研究范围已经从忽略各种非时变因素和条件的线性系统到越来越接近实际工况的非线性系统[5-7]。Lee等[8]提出一种结合音圈电机和液压阻尼器的三参数混合驱动器构成“立方”并联机构,并且辅以陷波器实现卫星反作用轮引起的振动隔振。Kong等[9]发明音圈电机和压电陶瓷作动器构成双级驱动器的Stewart 并联机构来实现LOS系统的高精度制导和高性能隔振,工作过程中大行程运动和小范围精确调整分别由两种作动器协同工作,但是控制相对复杂。刘小雨等[10]以空气弹簧主动隔振器为仿真和试验对象,采用相位补偿的前馈控制策略,改善了前馈通道输出的实际控制力,试验证明控制策略有效,隔振效果显著。牛牧青等[11]基于Jiles-Atherton模型,建立了主被动隔振装置的动力学模型,分析了主动驱动装置与被动隔振装置间的耦合作用。
本研究提出一种液压冗余式、主被动复合支撑的六自由度并联隔振平台。采用模糊PID复合控制策略进行仿真分析,结果表明基于该控制策略的主被动混合隔振明显优于被动隔振,能够衰减90%以上的振动干扰,扩大了隔振频率的带宽。
1 冗余六自由度并联隔振平台设计
普通六自由度隔振台只有六个激振器,而冗余六自由度隔振平台激振器数目大于受控自由度数,对于大型多轴隔振平台,为了提高抗倾覆能力以及保证稳定性,往往采用冗余式。冗余六自由度并联隔振平台三维模型,如图1所示,主要包括基座、动平台、复合支撑以及球形铰链,可以衰减空间六个自由度的振动,其中每条复合支撑均由主动作动器和被动隔振器组成,主动作动器作为振动控制的执行元件,具有较好的低频减振效果,可以控制谐振峰处的振动,被动隔振器提供被动隔振,在高频段振动抑制效果较好,两者结合实现主被动混合隔振,具有较宽的隔振频段,每条复合支撑通过球铰与基座和动平台进行连接。
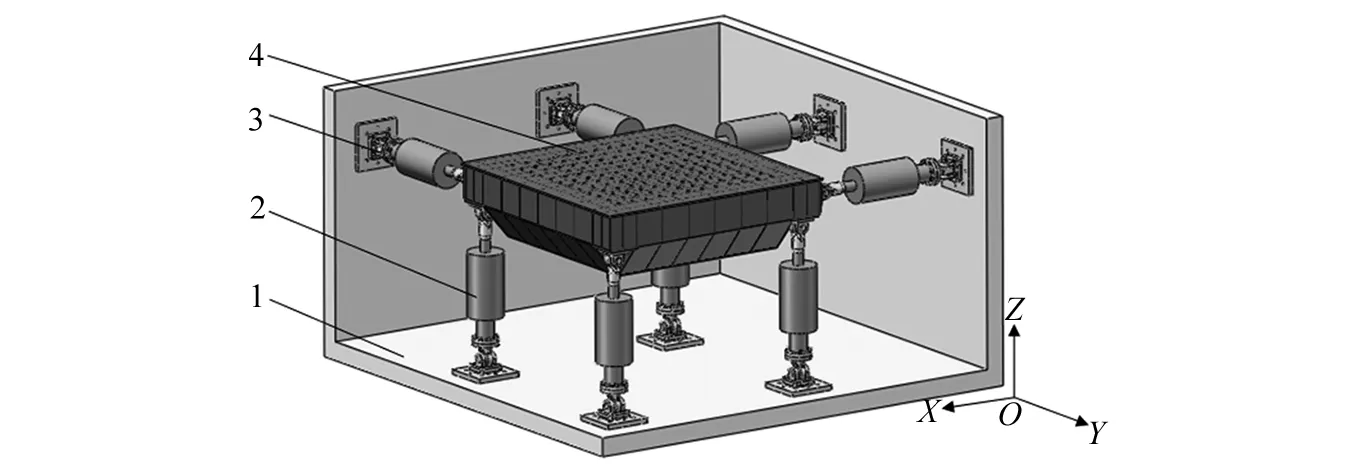
1.基座; 2.主被动复合支撑; 3.球铰; 4.动平台。图1 冗余六自由度并联隔振平台三维模型Fig.1 Three dimensional model of redundant 6DOF parallel vibration isolation platform
主被动复合支撑结构,如图2所示,复合支撑主要由液压作动器、金属螺旋弹簧、橡胶阻尼块等组成,上边部分通过球铰连接于隔振平台的动平台,下边部分通过球铰连接于隔振平台的基座,液压作动器仅作为力发生器提供主动力。复合支撑结构上采用液压作动器与被动弹簧阻尼系统并联的方式,采用这种设计方案的优点在于,当隔振平台的液压作动器失效时,即液压作动器的主动力零时,被动隔振器仍然能够通过阻尼控制正常工作,此时支撑采用弹簧-阻尼器的形式来吸收耗散由于基座振动产生的能量,从而达到振动隔离的目的,大大提高了隔振平台的可靠性和稳定性。

1.橡胶块; 2.金属弹簧; 3.液压作动器; 4.伺服阀块。图2 复合支撑结构图Fig.2 Composite support structure diagram
2 主被动混合隔振数学模型
采用Newton-Euler法建立了并联隔振平台主被动混合隔振数学模型[12-13],数学模型可由式(1)表示
(1)

液压作动器输出的主动力方程可表示为

(2)
式中:Ap为活塞有效面积,m2;PL为负载压力,Pa;Ka为伺服放大器增益,A/V;Ksv为伺服阀的流量增益,m/V;Kq为滑阀流量增益,m2/s;Kce为包括泄露在内的总的压力流量系数,(m3/s)/Pa;s为复变数;ωsv为伺服阀的固有频率,rad/s;ζsv为伺服阀的阻尼比,通常取0.5~0.7;ωm为液压固有频率,rad/s;ζm为液压阻尼比,通常取0.1~0.2;ωr为转折频率,rad/s。
3 并联隔振平台被动隔振性能分析
根据建立的并联隔振平台主被动混合隔振数学模型,考虑液压作动器失效的情况,即主动力为零时,可以得到并联隔振平台被动隔振数学模型表达式如式(3)所示。
(3)
利用MATLAB/Simulink软件搭建并联隔振平台被动隔振仿真模型,如图3所示。对搭建的被动隔振模型仿真前,需要输入仿真参数,而相关的仿真参数在隔振平台的设计阶段就已经确定,具体仿真参数如表1所示。

图3 被动隔振仿真模型Fig.3 Simulation model of passive vibration isolation

表1 主要仿真参数Tab.1 Main simulation parameters
为了研究并联隔振平台的六维被动隔振性能,仿真时将针对基座平动和转动方向分别施加正弦位移扰动和正弦角位移扰动来模拟空间环境振动,扰动信号的初相位为0,频率分别为3 Hz,5 Hz,10 Hz,这几个频率既包含了被动隔振时的频段,又包含了主动隔振时的频段,不仅可以研究被动隔振的性能,同时对并联隔振平台主被动混合隔振的研究也具有参考意义。且由于本研究并联隔振平台关于X=Y平面对称,当基座只有Y轴向振动干扰时,仿真结果与只有X轴向振动干扰时相同。因此这里只针对X,Z平动方向和转动方向开展研究。
(1) 沿X轴向的线扰动。
沿X轴向对并联隔振平台的基座分别施加幅值为0.001 m,频率为3 Hz,5 Hz,10 Hz的直线扰动,负载加速度响应随时间的变化曲线,如图4所示。
由图4可知,当干扰频率分别为3 Hz,5 Hz和10 Hz时,对应的负载加速度响应分别为0.05 m/s2,0.07 m/s2和0.08 m/s2,通过计算可得对应的振动传递率分别为0.140 7,0.070 9和0.020 3。

图4 X轴向线扰动时负载加速度响应Fig.4 Load acceleration response under X-axis line disturbance
(2) 沿Z轴向的线扰动。
沿Z轴向对并联隔振平台的基座分别施加幅值为0.001 m,频率为3 Hz,5 Hz,10 Hz的直线扰动,负载加速度响应随时间的变化曲线,如图5所示。
由图5可知,当干扰频率分别为3 Hz,5 Hz和10 Hz时,对应的负载加速度响应分别为0.14 m/s2,0.16 m/s2和0.17 m/s2,通过计算可得对应的振动传递率分别为0.394 0,0.162 1和0.043 1。

图5 Z轴向线扰动时负载加速度响应Fig.5 Load acceleration response under Z-axis line disturbance
(3) 绕X轴向的角扰动。
绕X轴向对并联隔振平台的基座分别施加幅值为0.001 rad,频率为3 Hz,5 Hz,10 Hz的角扰动,负载角加速度响应随时间的变化曲线,如图6所示。
由图6可知,当干扰频率分别为3 Hz,5 Hz和10 Hz时,对应的负载加速度响应分别为0.36 rad/s2,0.32 rad/s2和0.37 rad/s2,通过计算可得对应的振动传递率分别为H>1、0.324 2和0.093 7。

图6 X轴向角扰动时负载角加速度响应Fig.6 Load angular acceleration response under X-axis angular disturbance
(4) 绕Z轴向的角扰动。
绕Z轴向对并联隔振平台的基座分别施加幅值为0.001 rad,频率为3 Hz,5 Hz,10 Hz的角扰动,负载角加速度响应随时间的变化曲线,如图7所示。
由图7可知,当干扰频率分别为3 Hz,5 Hz和10 Hz时,对应的负载加速度响应分别为0.38 rad/s2,0.36 rad/s2和0.39 rad/s2,通过计算可得对应的振动传递率分别为H>1、0.364 7和0.098 8。
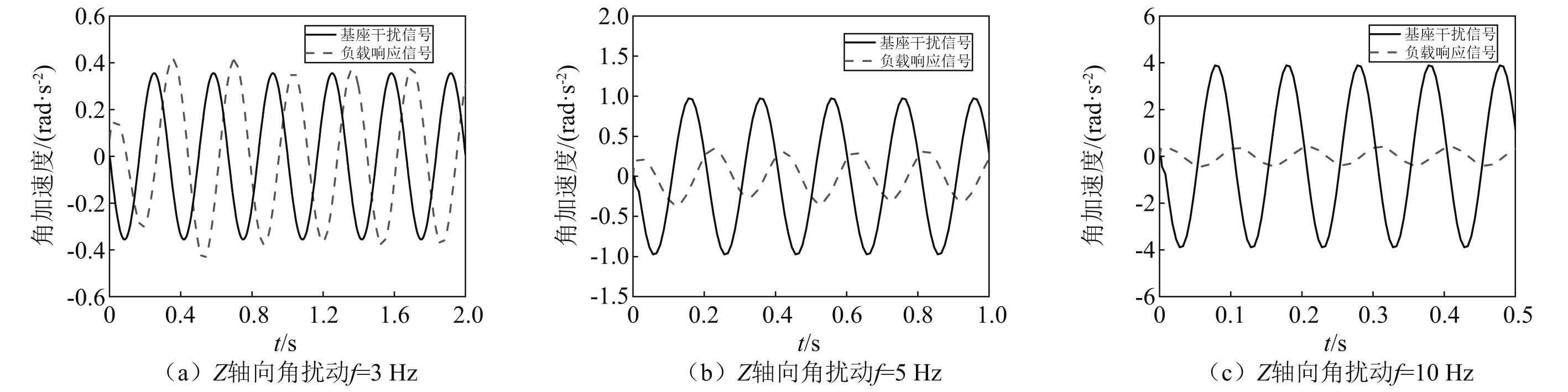
图7 Z轴向角扰动时负载角加速度响应Fig.7 Load angular acceleration response during Z-axis angular disturbance
由表2可知,振动干扰频率越高,振动传递率越小,被动隔振性能越好;当干扰频率为相对高频10 Hz时,在平动和转动方向上的振动传递率均小于0.1,说明能够衰减90%以上的基座振动,干扰频率大于10 Hz时,隔振效果会进一步提升;当干扰频率为相对低频3 Hz时,振动传递率较大,振动衰减较小,尤其在转动方向更为明显,不仅没有隔振效果反而将基座振动干扰放大,这主要是由于绕Z轴转动方向的干扰频率为2~3 Hz左右时,达到了并联隔振平台的固有频率。另外干扰频率相同时,转动方向上的振动传递率明显高于平动方向上的振动传递率,即转动方向上的隔振性能明显低于平动方向,所以主被动混合控制时主要针对转动方向进行隔振。

表2 并联隔振平台被动隔振传递率Tab.2 Passive transmission rate of parallel vibration isolation platform
4 并联隔振平台主被动混合隔振性能分析
在对振动激励进行主被动混合控制的过程中,控制算法的设计是其中最重要的环节之一,控制算法的优劣在很大程度上决定了性能的好坏。在工业控制领域,PID控制器[14-15]因结构简单,使用方便而被广泛使用。然而PID控制属于线性控制,其只在工作点附近具有良好的控制性能,偏离工作点较远时,由于控制对象的非线性,将难以保证其控制性能。模糊控制在偏离工作点较远的区域可明显改善控制性能,并且对控制对象特性的变化比PID线性控制器具有更强的鲁棒性。因此将基于模糊PID复合控制算法[16-18]对并联隔振平台主被动混合隔振性能进行分析,其中模糊控制规则如表3所示,所搭建的主被动混合隔振仿真模型,如图8所示,以绝对速度作为隔振平台的反馈信号能够降低系统的固有频率,提高主动隔振的性能,因此选取隔振平台8个顶端球铰处沿复合支撑作用力方向上的的绝对速度作为反馈信号。其中:子系统1~8表示模糊PID复合控制仿真模型,如图9所示,其特点是在大偏差范围内利用模糊控制算法调整系统的控制量,而在小偏差范围内转换成PID控制算法实现振动控制的目的;子系统9~16表示液压作动器主动力模型,如图10所示,在隔振过程中提供与负载运动方向相反的主动力,从而减小振动的幅值。

图9 模糊PID控制器仿真模型Fig.9 Simulation model of fuzzy PID controller

图10 液压作动器仿真模型Fig.10 Hydraulic actuator simulation model

表3 模糊控制规则Tab.3 Fuzzy control rule

图8 主被动混合隔振仿真模型Fig.8 Simulation model of active and passive hybrid vibration isolation
其中模糊控制器中的量化因子和比例因子由量化档数和模糊论域确定[19],取Ke=30,Kec=15,Ku=0.17;PID控制器中的参数整定采用试凑法,取Kp=0.8,Ki=Kd=0;复合控制器根据给定的偏差范围自动实现两种算法的转换,该值为设为0.2。
对搭建的主被动混合隔振仿真模型进行仿真前,需设置仿真参数,具体的仿真参数如表4所示。

表4 仿真的基本参数Tab.4 Basic parameters of simulation
由被动隔振性能分析可知,转动方向的隔振性能明显低于平动方向的隔振性能,因此这里主要针对转动方向的主被动混合隔振性能进行分析。
(1) 绕X轴方向的角扰动。
绕X轴向对隔振平台的基座分别施加幅值为0.001 rad,频率为3 Hz,5 Hz,10 Hz的角扰动,负载角加速度响应随时间的变化曲线分别,如图11所示。
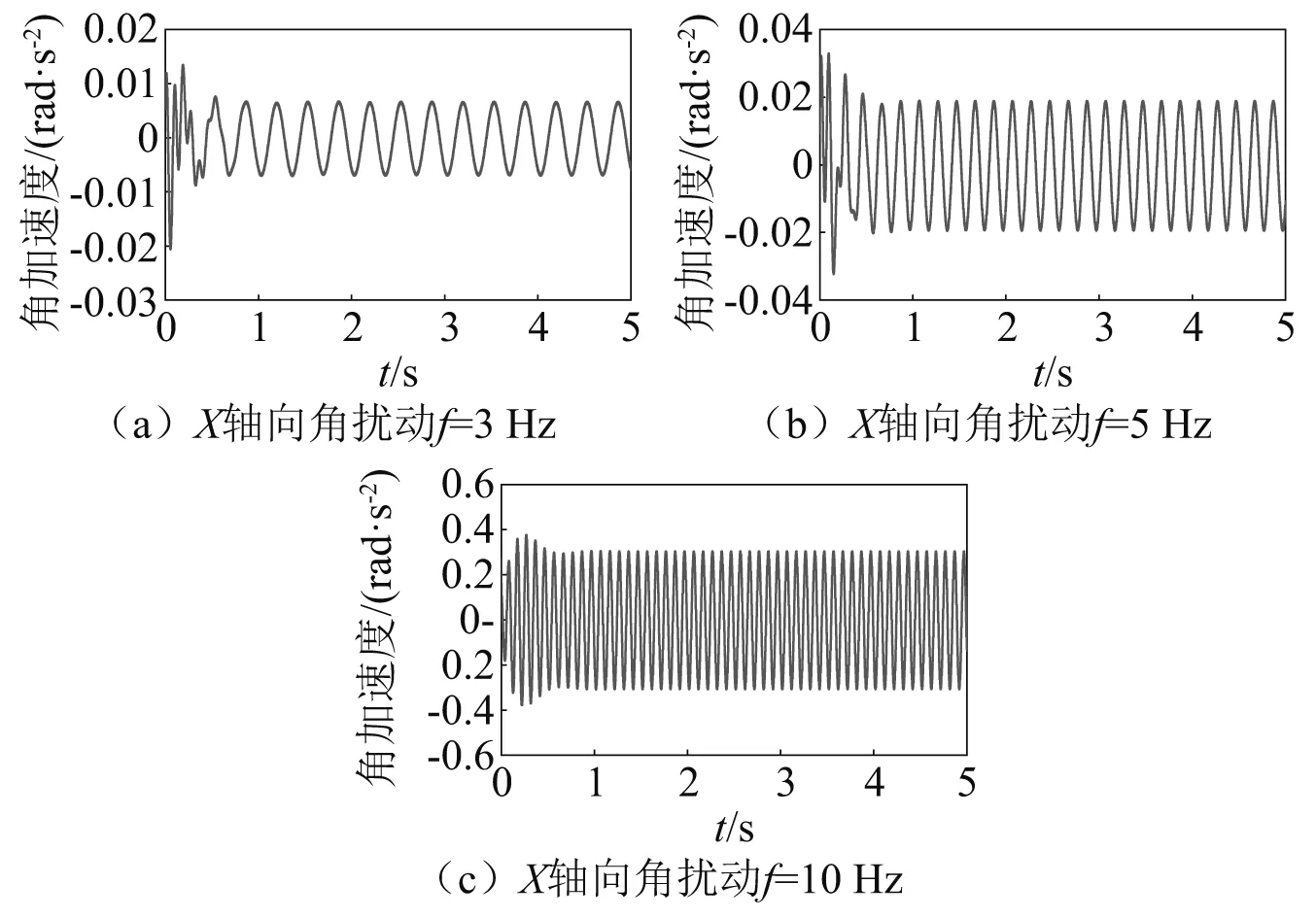
图11 X轴向角扰动时负载角加速度响应Fig.11 Load angular acceleration response under X-axis angular disturbance
由图11可知,当干扰频率分别为3 Hz,5 Hz和10 Hz时,对应的负载加速度响应分别为0.006 rad/s2,0.019 rad/s2和0.3 rad/s2,通过计算可得对应的振动传递率分别为0.016 9,0.019 3,0.076 0。
(2) 绕Z轴方向的角扰动。
绕Z轴向对隔振平台的基座分别施加幅值为0.001 rad,频率为3Hz、5 Hz,10 Hz,15 Hz的角扰动,负载角加速度响应随时间的变化曲线,如图12所示。

图12 Z轴向角扰动时负载角加速度响应Fig.12 Load angular acceleration response during Z-axis angular disturbance
由图12可知,当干扰频率分别为3 Hz,5 Hz和10 Hz时,对应的负载加速度响应分别为0.006 rad/s2,0.017 rad/s2和0.28 rad/s2,通过计算可得对应的振动传递率分别为0.016 9,0.017 2,0.070 9。
表5和表6给出了基座受到绕X和Z轴向角振动干扰时,并联隔振平台在纯被动隔振和主被动混合隔振情况下的振动传递率情况,其他方向的隔振情况与这两种情况研究过程相同。通过分析仿真结果可以得到:采用模糊PID控制的并联隔振平台主被动混合隔振性能明显优于被动隔振,当干扰频率为3 Hz,5 Hz,10 Hz时均可以达到90%以上的隔振效果,扩大了隔振频率的带宽,增加主动控制后不仅对相对低频区的振动干扰有显著的抑制效果,而且对相对高频区仍然保持着很好的隔振效果,与纯被动隔振相比不会带来负效果。

表5 X轴向角扰动时振动传递率对比表Tab.5 Comparison of vibration transmission rate under X-axis angular disturbance

表6 Z轴向角扰动时振动传递率对比表Tab.6 Comparison of vibration transmission rate under Z-axis angular disturbance
5 结 论
(1) 被动隔振对相对高频的微振动具有良好的衰减性能,而对相对低频的微振动的振动衰减性能较差,且并联隔振平台在转动方向上的隔振性能明显低于平动方向上的隔振性能。为使并联隔振平台能够隔离的带宽增大就需要减小隔振平台的固有频率,从而降低并联隔振平台达到衰减目标振幅的最低扰动频率。
(2) 采用基于模糊PID控制的并联隔振平台,其主被动混合隔振性能明显优于被动隔振,扩大了隔振频率的带宽。
