防止滑橇直升机地面共振机体需用阻尼分析
2022-02-16于仁业孙秀文李先哲李宗秀
于仁业, 王 刚, 孙秀文, 李先哲, 李宗秀
(1. 航空工业哈尔滨飞机工业集团有限责任公司 飞机设计研究所,哈尔滨 150066;2. 黑龙江财经学院 基础教学部,哈尔滨 150025)
直升机预防地面共振的主要设计措施:一是旋翼摆振后退型模态频率和全机在起落架上的固有频率分开足够远;二是在临界稳定状态旋翼和机体的可用阻尼之乘积大于需用阻尼,则可以避免“地面共振”的发生[1]。其中抑制地面共振的第二种措施,旋翼阻尼由减摆器提供,机体阻尼则由起落架提供。对于轮胎式起落架,一般依据直升机着陆缓冲性能要求就可初步确定起落架阻尼,再通过地面共振分析来校核阻尼是否满足地面共振要求。对于滑橇起落架直升机,为了避免地面共振需要在滑橇式起落架和机体之间加装阻尼器,阻尼器阻尼则必须满足抑制地面共振机体需用阻尼设计要求。
针对滑橇起落架直升机“地面共振”问题,Tho等[2]对 UH-1Y滑橇式直升机的起落架刚度优化表明相对“柔软”的滑橇起落架能降低机身纵向(F/A)和滚转(ROLL)模态频率,“地面共振”稳定性阻尼裕度更大。徐敏等[3]采用有限元法计算了滑橇起落架刚度和变形,并进行了“地面共振”分析。吴靖等[4]研究了机体设置阻尼器后非比例阻尼对滑橇直升机机体动力学特性的影响。这些研究从理论上证明了机体在滑橇起落架上的振动特性对直升机地面共振的影响是很大的,若能开展机体动特性试验验证,并结合地面共振参数分析,将对确定滑橇起落架直升机机体需用阻尼具有实际意义。
本文开展了直升机在滑橇起落架上的振动特性仿真分析与试验相关性研究,采用仿真分析方法计算的机体模态频率误差在8%以内。采用机体振动特性仿真分析方法计算了某型机机体模态频率和振型,求出了机体在桨毂中心处的当量质量、当量刚度,并采用地面共振平面动力模型,研究了机体质量和旋翼减摆器刚度和阻尼变化对机体需用阻尼的影响。
1 滑橇直升机机体振动特性仿真分析与验证
1.1 机体当量参数计算方法
直升机地面共振分析时采用二维当量模型,要计算机体在起落架上的振动模态参数如频率、刚度、质量、阻尼等,并且把这些模态参数向桨毂中心进行当量化处理[5-6]。张晓谷[7]针对轮胎式起落架直升机采用建立直升机机体振动微分方程组的理论方法计算振动频率和振型,再向桨毂中心当量。当量前后机体模态频率不变,机体模态当量质量、当量刚度、振型计算公式按横向和纵向模态分别给出。理论方法把轮胎起落架简化为具有刚度和阻尼的三个弹簧。但对于滑橇直升机,起落架与地面以橇管接触,起落架前后横梁由于机体作用存在刚度耦合,这些非线性因素导致不可再用理论方法计算滑橇直升机机体振动特性。国外Monterrubio等[8]采用有限元仿真方法计算了滑橇起落架机体振动特性。因此,可以采用有限元仿真方法计算机体当量参数。
横向模态当量质量和当量刚度计算公式为
(1)
纵向模态当量质量和当量刚度计算公式为
(2)
式中:M为机体质量;Ix和Iy为机体绕X轴和Y轴的转动惯量;Zh为机体重心到桨毂中心的垂向距离;Mxi,Kxi,ωxi和Myi,Kyi,ωyi分别为机体横向和纵向模态当量质量、当量刚度、振动频率;ai和bi为以重心至节线的距离表示的模态振型;xoi和yoi为机体纵向和横向模态重心平动位移;φxoi和φyoi为机体纵向和横向模态重心绕X轴和Y轴的转动位移。机体振动频率、重心处平动位移和转动位移均由有限元仿真计算得到。
由当量质量和当量刚度计算公式可知,机体振动频率和振型计算尤为关键,为了确定有限元仿真分析方法的可靠性,设计带滑橇起落架机身假件模型测量机体振动特性,进行仿真分析与试验相关性分析,研究仿真分析的关键参数设置。
1.2 机体桨毂中心激振试验
1.2.1 试验设计
机体在起落架上的振动特性主要取决于起落架,经典地面共振分析时机体简化为刚体,因此用一个真实的滑橇起落架和一个由刚性桁架组成的直升机机身假件组成带起落架的模拟直升机。刚性桁架可以施加配重,模拟真实直升机的质量和转动惯量。另外机体与起落架连接方式影响机体振动频率[9],所以机身假件与起落架采用真实接头结构连接,此试验模型中,机身通过前部两个固定接头、后部一个固定接头与滑橇起落架前后横梁连接。
测量滑橇起落架直升机机体振动特性的试验为桨毂中心动特性测量试验[10],是一种低频大振幅振动试验,采用液压作动筒激振器进行单向定力激振。试验时模拟直升机停放在水泥平台上,液压激振器的活塞杆连接机体,液压激振器固定于承力墙。试验现场如图1所示。试验状态包括机体大、小两种质量状态。
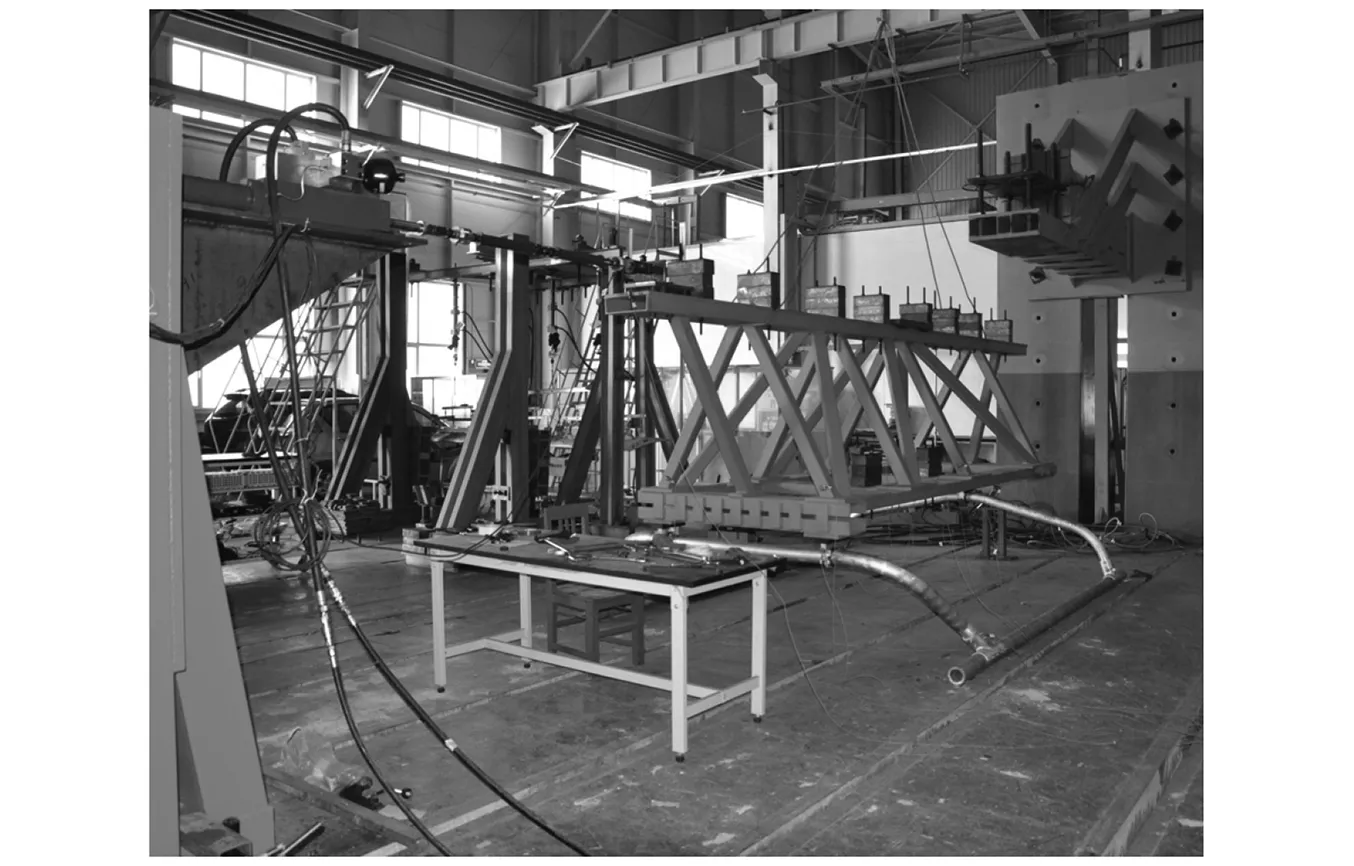
图1 滑橇起落架直升机桨毂中心动特性试验Fig.1 Central dynamic characteristics test of skid helicopter hub
1.2.2 试验过程
(a)在模拟机身桁架主结构、滑橇起落架固定接头和橇管处布置PCB低频加速度传感器,在模拟直升机桨毂中心处布置位移传感器和力传感器。采用MTS FT100液压伺服控制系统和LMS SCADAS III振动系统进行激振控制和振动数据采集。
(b)用作动筒在模拟直升机桨毂中心或其纵向延长线位置处进行激振,激励方向分别为侧向Y和纵向X。激振频率根据初步机体固有频率分析结果确定在1~15 Hz内。
(c)测量激振力、振动位移和振动加速度时间历程响应数据。
1.2.3 试验数据处理结果
采用LMS SCADAS III振动系统采集力传感器、位移传感器和加速度传感器的时域信号并进行数据分析,由桨毂中心位移传感器的频率响应曲线获得振动模态频率,由机体加速度传感器获得机体模态振型用于模态识别。典型的大质量状态桨毂中心纵向平动模态和横向滚转模态位移频响曲线,分别如图2和图3所示。模态振型如图4和图5所示。模拟直升机机体固有频率试验结果,如表1所示。

图2 纵向平动模态桨毂中心位移频响曲线Fig.2 Displacement frequency curve of longitudinal translation mode for simulate helicopter hub central

图3 横向滚转模态桨毂中心位移频响曲线Fig.3 Displacement frequency curve of lateral roll mode for simulate helicopter hub central

图4 一阶平动和滚转模态振型Fig.4 First-order translation and roll mode shapes
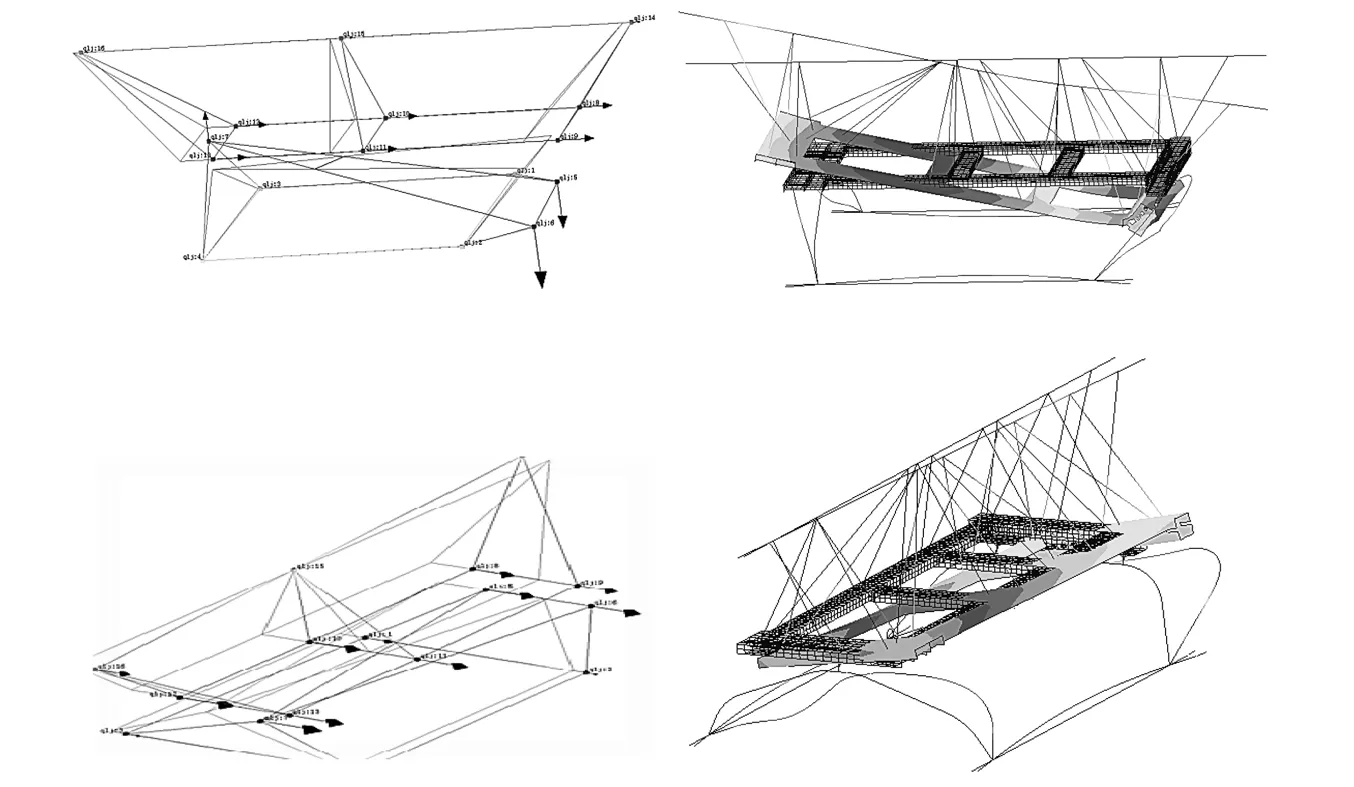
图5 二阶俯仰和平动模态振型Fig.5 Second-order translation and pitch mode shapes

表1 模拟直升机机体固有频率试验结果Tab.1 Results of natural frequencies test of simulate helicopter
1.3 机体振动特性仿真与试验对比分析
采用有限元方法建立模拟直升机动力学模型,进行模态分析,获得机体振频和振型,机体振动频率如表2所示。机体模态振型仿真结果与试验结果对比见图4和图5。从图中可见,仿真分析的模态振型和试验测试的模态振型相同,滑橇起落架直升机机体的一阶低频模态应该是纵向平动模态和横向滚转模态,二阶高频模态是纵向俯仰模态和横向平动模态。
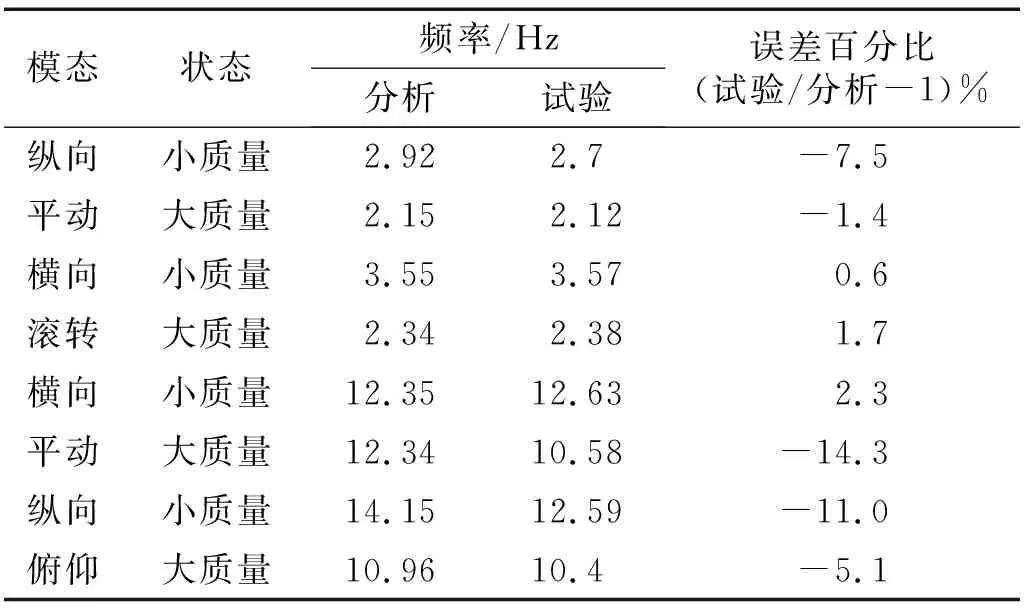
表2 模拟直升机机体固有频率仿真与试验误差分析Tab.2 Simulation and experiment error analysis of simulate helicopter natural frequencies
机体振动频率仿真结果与试验结果误差分析见表2和图6,纵向平动模态和横向滚转模态,仿真与试验一致性较好,最大误差在8%以内;纵向俯仰模态和横向平动模态最大误差在15%以内。高频的纵向俯仰模态和横向平动模态误差较大的原因主要由结构的有限元模型简化、边界条件模拟的差异等因素造成,但对于滑橇起落架直升机来说10 Hz以上的机体模态不会和3 Hz左右的旋翼摆振后退型模态耦合,高频模态不是滑橇起落架地面共振危险模态。
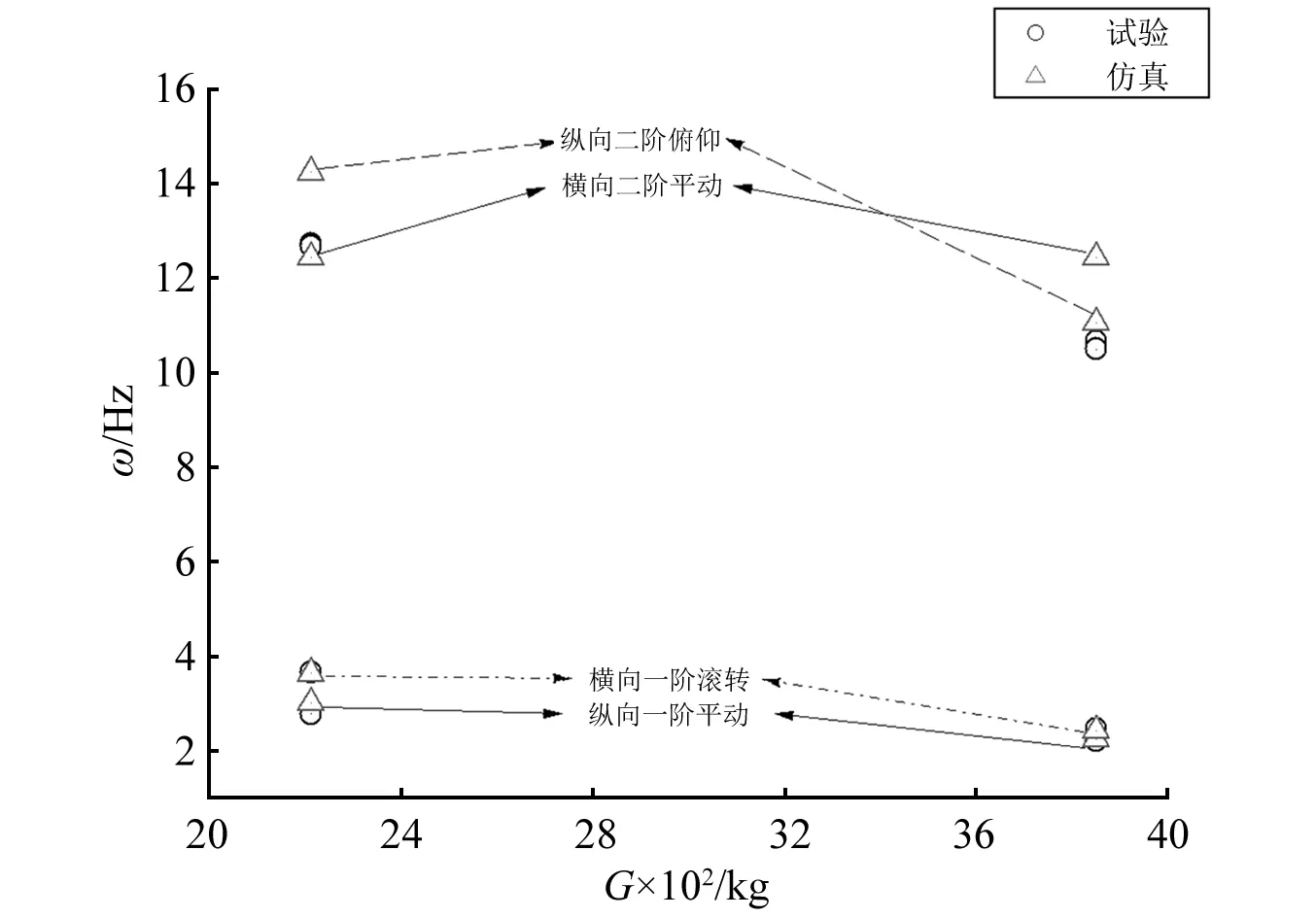
图6 机体振动频率Fig.6 Airframe vibration frequency
地面共振的危险模态是纵向平动和横向滚转模态,8%的最大误差是可接受的。因此,采用有限元仿真方法计算机体振动特性是可行的。
2 机体需用阻尼设计方法
2.1 地面共振分析方法
直升机地面共振频域分析采用平面动力模型(二维当量模型)表示旋翼-机体耦合振动系统的动力学分析模型,如图7所示。
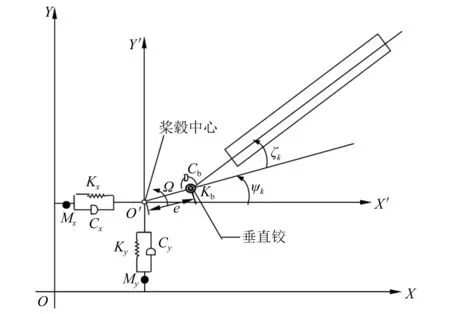
图7 地面共振平面动力模型Fig.7 Ground resonance plane dynamic model
平面动力模型中,机体模态质量、阻尼、刚度、均当量化到桨毂中心,以Mx,Cx,Kx和My,Cy,Ky分别表示机体纵向、横向模态的动力学特性。旋翼共有N片桨叶,图7中仅示出了第K片桨叶,ξk及ψk分别表示第K片桨叶的摆振位移和方位角;e为垂直铰外伸量;Kb和Cb分别为桨叶根部的摆振刚度和摆振阻尼。XOY为机体坐标系,X′O′Y′为旋翼坐标系。
采用二维平面模型建立旋翼和机体耦合运动方程
(3)
通过多桨叶坐标转换,可以消除旋翼-机体耦合运动方程中的周期系数,缩减运动自由度,消除周期系数后耦合运动方程写成如下矩阵的形式

(4)
式中:M,C,K矩阵由机体和旋翼模态刚度、质量、阻尼参数构成;X矩阵由桨毂中心位移和桨叶摆振位移构成。
经典地面共振运动方程式(4)在数学上表述为常系数微分方程,它的稳定性问题可以用如下的常规矩阵特征值分析方法解决,式(4)的特征方程
[M]λ2+[C]λ+[K]=0
(5)
解此方程可得4对复特征值σ(λj)(j=1,2,3,4),分别表示旋翼-机体耦合振动系统的4个振动模态,特征值σ(λj)的实部R[σ(λj)]为第j个振动模态的模态阻尼,虚部I[σ(λj)]为模态频率。旋翼和机体耦合模态阻尼用ξ表示,ξ为特征值σ(λj)的实部除以虚部乘以-1,再乘以100%,即
(6)
当模态阻尼ξ为正时,耦合系统是稳定的,ξ越大越稳定。
地面共振分析的目的之一是“调频”,使共振转速避开旋翼额定转速和慢车转速,某型滑橇直升机共振转速恰好处于旋翼额定转速和慢车转速之间,旋翼转速不可避免会通过共振转速,因此要求系统阻尼始终为正。
2.2 机体需用阻尼设计方法
根据地面共振经典理论,系统处于稳定状态的近似判据为[11]
(7)

由式(7)可知,直升机地面共振稳定所需的阻尼是机体和桨叶阻尼的乘积。其大小取决于机体质量、频率和桨叶静距、惯距、阻尼、摆振频率等参数。
精确的稳定判据通过地面共振稳定性分析给出,机体和桨叶阻尼由系统模态阻尼ξ表示,并且当模态阻尼满足下式时的机体当量阻尼即为机体需用阻尼[12]。
ξ>2%
(8)
直升机设计阶段,可将机体频率、当量刚度、当量质量和减摆器刚度、减摆器阻尼作为已知量输入,把满足式(8)的机体当量阻尼作为求解量输出。事实上机体频率、刚度、质量和减摆器刚度、阻尼这些已知量也是变化的,将这些量进行不同的参数组合,通过优化分析就可以得到一系列不同的机体需用阻尼值[13],为了满足适航要求要选取最大值作为机体需用阻尼。流程图如图8所示。
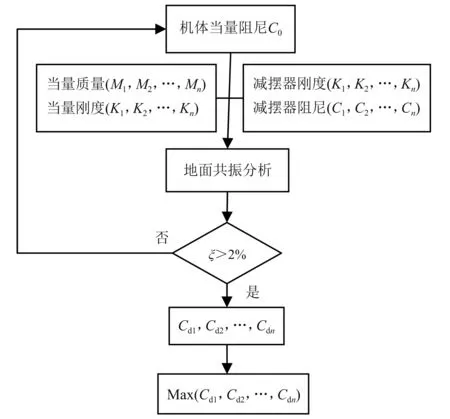
图8 机体需用阻尼计算流程图Fig.8 The flow chart of calculating the damping required of airframe
3 滑橇式直升机机体需用阻尼设计算例
3.1 机体振动特性分析
采用经试验验证的机体振动特性仿真方法建立某型滑橇起落架直升机全机动力学模型,如图9所示。直升机质量和转动惯量数据,如表3所示。

表3 直升机质量、转动惯量Tab.3 Helicopter weight and moment of inertia
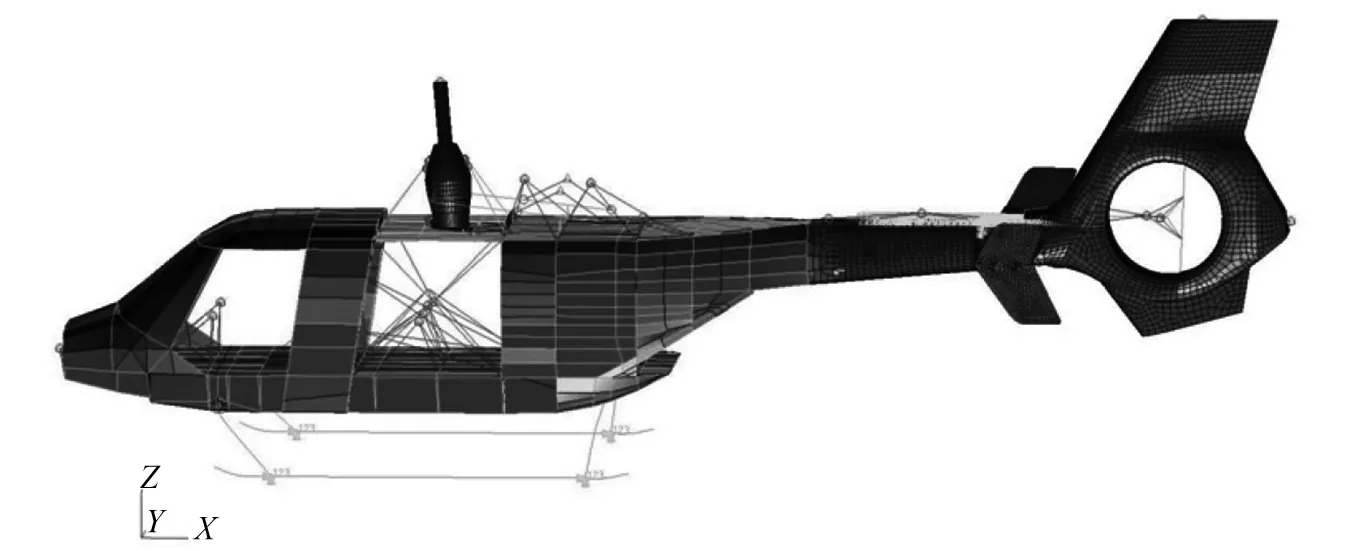
图9 直升机全机动力学模型Fig.9 The helicopter dynamic model
采用Nastran软件计算了直升机在滑橇起落架上的振动特性,模态频率如表4所示,机体在起落架上的四个振动模态:横向平动、纵向平动、纵向俯仰、横向滚转,模态振型如图10~图13所示。

表4 直升机不同状态下各阶模态固有频率Tab.4 Modal frequencies of helicopter under different weights
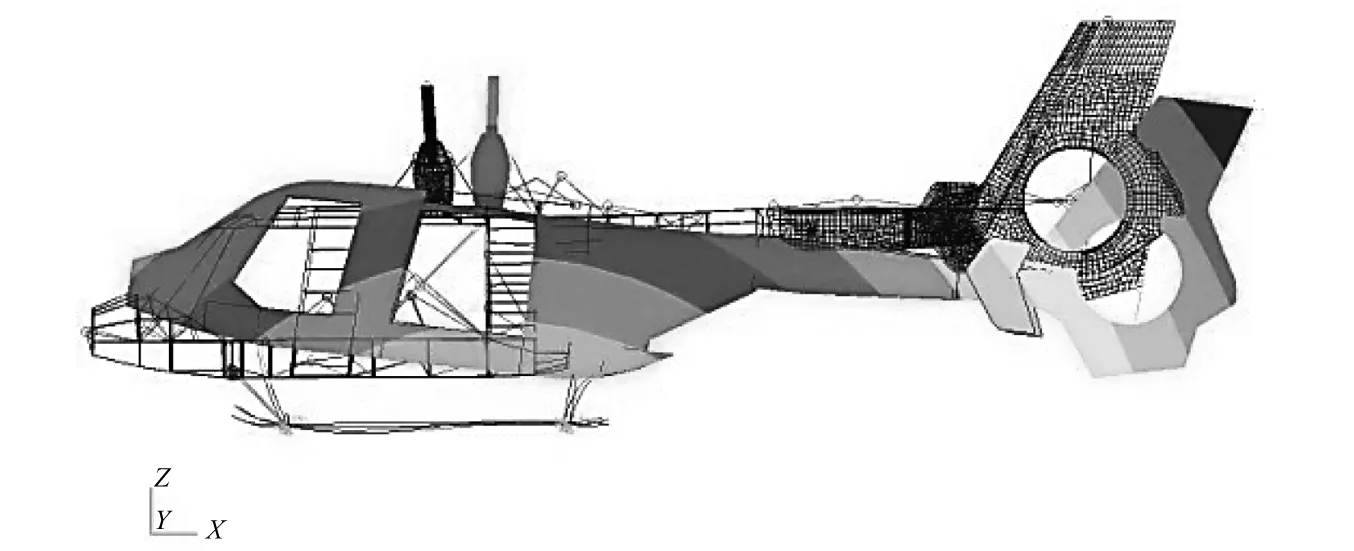
图10 纵向平动模态Fig.10 Longitudinal translation mode

图11 横向滚转模态Fig.11 Lateral roll mode
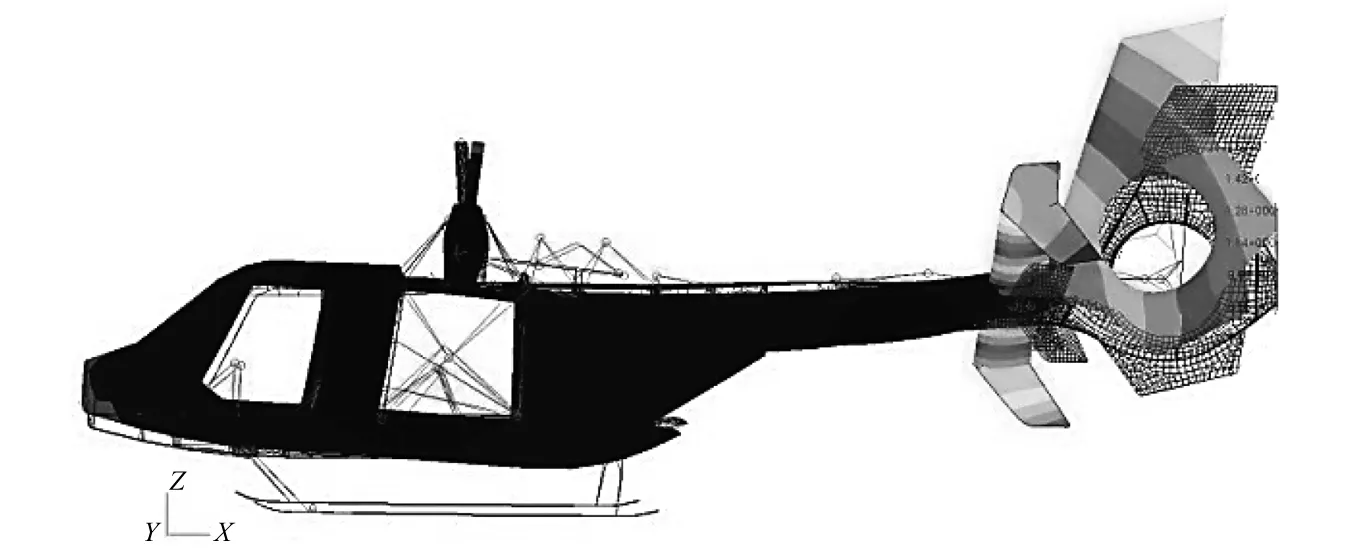
图12 纵向俯仰模态Fig.12 Longitudinal pitch mode

图13 横向平动模态Fig.13 Lateral translation mode
从表2机体固有频率计算结果可知,纵向平动和横向滚转模态频率在2 Hz以下,横向平动和俯仰模态频率大于6 Hz,旋翼摆振后退型频率一般在3 Hz左右,纵向平动和横向滚转模态是滑橇式直升机地面共振的危险模态,地面共振分析时只计算这两个模态的机体当量质量和当量刚度。根据式(1)和式(2)结合模态频率,计算模态振型ai和bi见表5,机体当量质量和当量刚度,如表6所示。

表5 直升机不同状态下各阶模态振型Tab.5 Mode shapes under different weights of helicopter

表6 机体模态参数Tab.6 Body modal parameters
3.2 机体需用阻尼计算
地面共振稳定性分析时机体参数采用表4计算的结果。直升机旋翼桨叶特性数据,如表7所示。
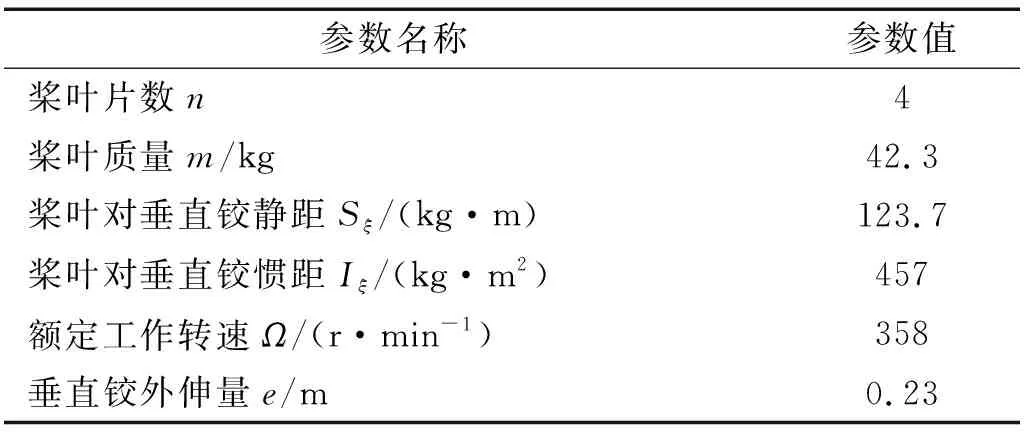
表7 旋翼桨叶特性参数Tab.7 Characteristics parameters of rotor blades
旋翼系统摆振阻尼由减摆器提供。某直升机桨叶减摆器为黏弹减摆器,在一定的摆振频率和振幅下工作,黏弹减摆器刚度和阻尼特性由复模量K′和K″决定。摆振频率、振幅大小、环境温度均影响减摆器刚度和阻尼[14-17]。某型直升机黏弹减摆器在振动位移幅值3.6 mm、周期激振的频率3 Hz条件下,复模量取值如表8所示。

表8 减摆器复模量Tab.8 Complex modulus of dampers
将表4、表5、表6中的机体和旋翼设计参数代入(5)式求解特征方程即可绘制地面共振稳定性频率和阻尼随旋翼转速变化曲线,并由式(6)计算耦合系统模态阻尼。
按机体需用阻尼计算流程图8,计算以下参数组合情况下的机体当量阻尼:①大质量+低温复模量;②大质量+常温复模量;③大质量+高温复模量;④小质量+低温复模量;⑤小质量+常温复模量;⑥小质量+高温复模量。
滑橇起落架直升机地面共振参数分析结果,如图14~图18所示。通过分析可知在最大、最小起飞质量状态下,纵向平动模态阻尼裕度最小,高温使共振转速点左移,低温使共振转速点右移。高温、大质量情况下,共振转速更靠近旋翼额定地慢转速Ωmin;低温、小质量情况下,共振转速更靠近旋翼额定工作转速Ωmax。质量越大,机体需用阻尼越大,纵向平动模态阻尼需求大于横向滚转模态阻尼需求。图中:LA为摆振前进模态;LR为摆振后退模态;F/A为纵向平动模态;ROLL为横向滚转模态。

图14 大质量不同温度下的模态频率Fig.14 Modal frequencies with larg weight and different temperature
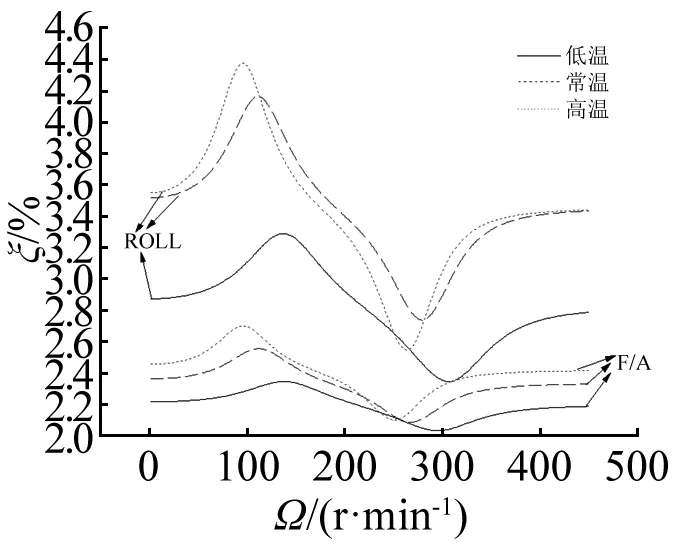
图15 大质量不同温度下的模态阻尼比Fig.15 Modal damping ratio with larg weight and different temperature

图16 小质量不同温度下的模态频率Fig.16 Modal frequencies with small weight and different temperature

图17 小质量不同温度下的模态阻尼比Fig.17 Modal damping ratio with small weight and different temperature
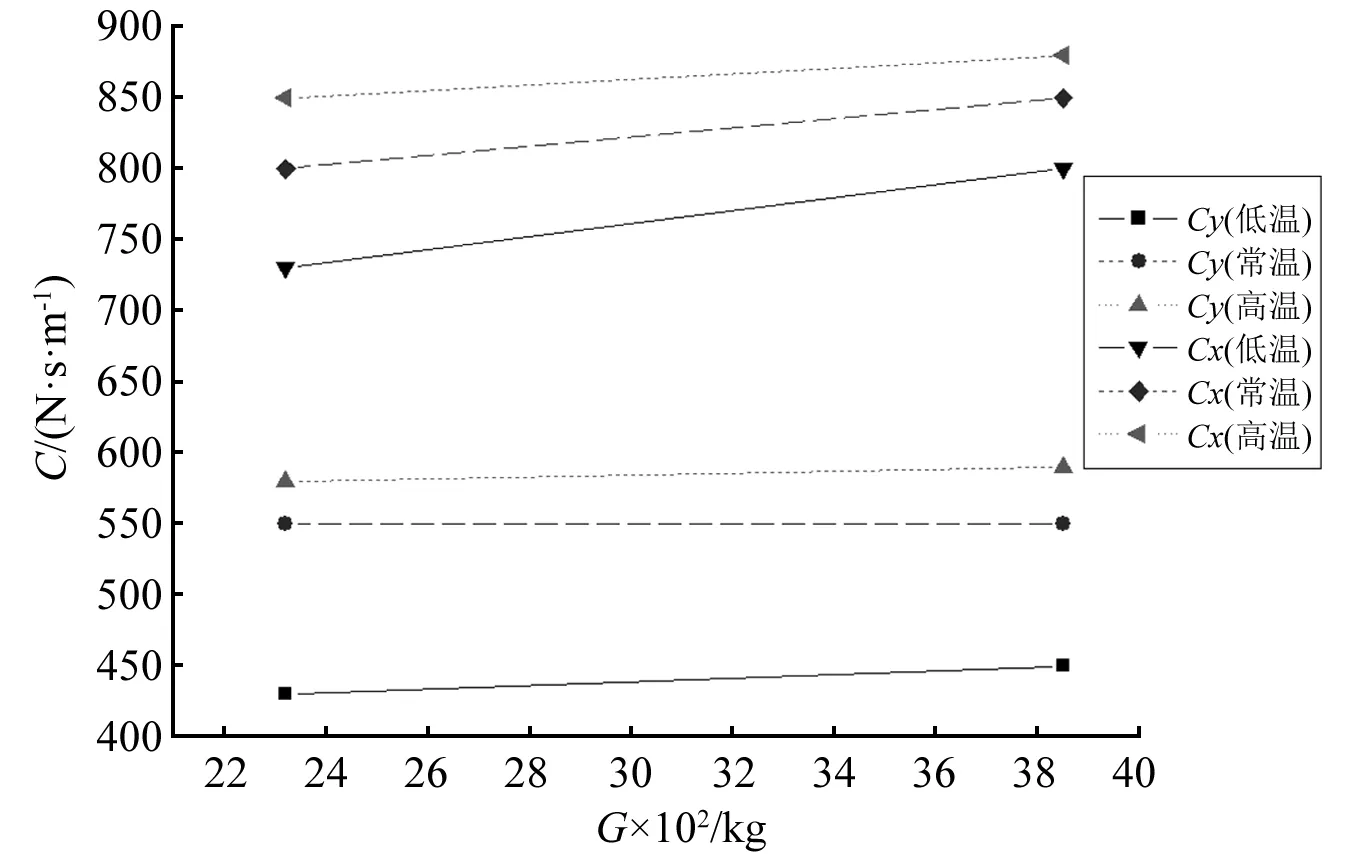
图18 机体需用阻尼Fig.18 Airframe required damping
4 结 论
为了抑制滑橇直升机地面共振,需要在起落架和机体之间加装阻尼器,通过防止滑橇直升机地面共振机体需用阻尼分析,可为机体阻尼器设计提供重要的参数,主要研究结论如下:
(1)滑橇直升机机体纵向平动模态和横向滚转模态频率较低,与旋翼摆振后退型模态耦合共振转速处于旋翼地慢和额定转速之间。
(2)经试验验证采用有限元仿真方法计算的机体地面共振危险模态振动频率误差大不于8%,计算的机体当量质量和当量刚度可用于地面共振分析。
(3) 滑橇直升机机体纵向平动模态比横向滚转模态需要更大的阻尼来抑制地面共振。
(4) 滑橇直升机在大质量、高温情况下抑制地面共振机体需用阻尼最大。
