通信时延下UAV/UGV混合编队控制系统的稳定性分析
2022-02-16赵文杰
朱 旭,赵文杰
(长安大学 电子与控制工程学院,西安 710064)
0 引言
无人机(UAV,unmanned aerial vehicle)/无人车(UGV,unmanned ground vehicle)混合编队控制,通过空地协作,可以实现UAV编队和UGV编队在感知、通讯、负载等方面的互补,提高整个系统的灵活性和对未知环境的适应性,从而完成单独UAV编队或UGV编队难以完成的任务,如空地立体化交通监管、快速精准跟踪追逃、协同定位、紧急救援等[1-2]。
然而,UAV与UGV之间存在巨大差异,不同的工作空间、不同的动力学特性,使得UAV/UGV混合编队控制变得异常困难[3-4]。同时,由于网络通讯环境和通讯带宽的限制,混合编队的交互信息中含有通信时滞,导致控制系统的稳定裕度急剧下降,甚至引发系统不稳定,进一步加剧了混合编队控制的难度[5-7]。因此,研究通信时延下UAV/UGV混合编队控制系统的稳定性具有重要意义。
关于通信时延下控制系统稳定性的研究,有两大类方法:时域方法、频域方法[8]。时域方法是当前的主流方法,往往基于Lyapunov-Razumikhin定理或Lyapunov-Krasovskii泛函进行研究[9-12]。然而,时域方法仅能获取通信时延下控制系统稳定的充分条件,而非充要条件,具有很大的保守性[13]。
频域方法致力于研究通信时延下控制系统特征方程的求解问题,可以获取系统稳定的充要条件[14]。但是,时延系统的特征函数具有无穷多个特征根,现有的数学工具无法计算出其所有特征根,所以更关注临界虚根(位于复平面虚轴上的特征根)求解[15]。常用的临界虚根求解方法有:Rekasius代换法[16]、辅助特征函数法[17]、直接法[18]、τ分解法等[19]。这些临界虚根求解方法各有优缺点,这里推荐辅助特征函数法,其主要优势包括:(1) 对临界虚根的检测可简单有效地通过求解辅助特征方程完成;(2)在辅助特征方程没有重根的前提下,所有临界虚根的稳定性行为可以直接判断,无需其他计算[20]。
目前,利用频域方法分析通信时延下UAV/UGV混合编队控制系统稳定性的研究较为匮乏,存在一些关键难题。比如,囿于UAV/UGV的异构特性,难以将频域方法直接应用于混合编队的复杂系统特征方程的求解。特别地,随着UAV、UGV数量的增加,混合编队系统特征方程的维数不断增加,临界虚根求解运算量呈指数膨胀,导致“维度爆炸”问题。因此,研究通信时延下UAV/UGV混合编队控制系统的稳定性问题,推导系统稳定的充要条件,尚存在研究瓶颈。
综合以上分析,本文研究通信时延下UAV/UGV混合编队控制系统的稳定性分析问题,旨在推导系统稳定的充要条件,计算准确的时延边界,即可容许的最大时延。首先,建立考虑UAV/UGV异构特性的混合编队模型,并描述混合编队的通信关系。接着,针对UAV群组、UGV群组,分别设计基于信息一致性的分布式控制器,并构建UAV/UGV混合编队控制系统。然后,利用矩阵相似变换,将高维异构的UAV/UGV混合编队控制系统降维拆分为若干等价的低维子系统,降低解析难度和运算量。最后,采用辅助特征函数法计算这些子系统特征方程的临界虚根,获取系统稳定的充要条件,得到准确的时延边界,并通过仿真验证了所提理论方法的有效性。
1 UAV/UGV混合编队建模
首先,对UAV、UGV分别进行建模,并确立UAV/UGV的共同控制量;然后,构建UAV/UGV混合编队的通信拓扑,描述编队的通信关系。
1.1 UAV与UGV建模
在地面惯性坐标系OXYZ中[21],由于无人车仅在OXY平面运动,因此选取平面运动状态作为UAV/UGV共同的控制量,而高度协同控制只在UAV群组内部进行。UAV模型选用四旋翼,UGV模型选用双轮差分驱动式。
首先,四旋翼无人机的运动学模型为[22]:
(1)

(2)
再者,双轮差分驱动轮式移动机器人的运动学模型为[23]:
(3)

为了实现UAV/UGV混合编队在平面的协同,选取偏航角和偏航角速度作为UAV/UGV共同的控制量。
1.2 UAV/UGV混合编队的通信拓扑
考虑由m架四旋翼UAV、n-m辆双轮差分驱动UGV所构成的混合编队,其通信拓扑可以用图论的相关知识进行描述[24-25]。
UAV/UGV混合编队可以分为UAV群组和UGV群组,Γ1={1,2,…,m},Γ2={m+1,m+2,…,n}分别表示UAV、UGV的集合,有Γ1∪Γ2=v。Lf∈m×m是UAV群组通信拓扑的拉普拉斯矩阵,Lg∈(n-m)×(n-m)是UGV群组通信拓扑的拉普拉斯矩阵。

2 通信时延下UAV/UGV混合编队的稳定性分析
针对通信时延下的UAV/UGV混合编队,设计分布式控制器,并分析编队的稳定性,获取准确的时延边界。首先,设计通信时延下基于一致性算法的UAV/UGV混合编队分布式控制器,并推导编队的闭环系统特征方程。然后,根据UAV/UGV编队的闭环系统特征方程,推导编队稳定的一组必要条件;继而利用辅助特征函数法对带有通信时延的UAV/UGV混合编队进行稳定性分析,证明只有一个时延区间可以令编队稳定,并得到编队稳定的充要条件,获取准确的时延边界。
2.1 UAV/UGV混合编队的分布式控制器设计
(4)
其中:ψd(t)、ωd(t)为UAV/UGV混合编队的期望偏航角和期望偏航角速度。UAV/UGV混合编队的控制目标为:
(5)
接下来,针对UAV群组、UGV群组,分别设计基于信息一致性的分布式控制器:
(6)
(7)


(8)
其中:
其中:I为单位矩阵。定义矩阵L*为:
(9)
存在变换矩阵U,使得通过相似变换U-1L*U=Λ,得到对角矩阵Λ,Λ的特征值与L*相同,设这些特征值为γ1,γ2,…,γn。利用上述相似变换,推导出UAV/UGV混合编队控制系统的特征方程:
f(λ,τ)=|H1+H2e-λτ-λI|=
|U-1(λ2I+(λ+1)e-λτL*)U|=
|λ2I+(λ+1)e-λτΛ|=
(10)
其中:λ为拉氏变量,fi(λ)为对控制系统特征方程进行降维拆分后的子系统特征方程,其形式为:
fi(λ,τ)=λ2+γi(λ+1)e-λτ
(11)
至此,利用矩阵相似变换,将高维异构的混合编队控制系统(8)降维拆分为若干等价的低维子系统(11),分析这些子系统的稳定性与分析原UAV/UGV混合编队控制系统等价,可大幅度降低稳定性分析的解析难度和运算量。
2.2 准确时延边界求解
针对通信时延下UAV/UGV混合编队控制系统的稳定性分析分为两部分。首先,给出整个系统稳定的一组必要条件,推导无时延情况下的稳定性判据。然后,利用辅助特征函数法,证明只存在一个时延区间可以令编队稳定,并计算通信时延下系统准确的时延边界,得到编队稳定的充要条件。
无时延情况下UAV/UGV混合编队控制系统的稳定条件,是有时延情况下系统稳定的前提和必要条件。因此,先给出无时延情况下的稳定性判据。
引理1:对于τ=0,当且仅当γi>0时,i∈V,UAV/UGV混合编队控制系统(8)是Hurwitz稳定的。
证明:由于分析UAV/UGV混合编队控制系统(8)的稳定性与分析各个子系统(11)的稳定性等价,所以计算τ=0时子系统(11)的特征方程:
fi(λ,0)=λ2+γiλ+γi
(12)
用劳斯判据推导式(12)Hurwitz稳定的充要条件,即γi>0。
接下来,给出通信时延下UAV/UGV混合编队控制系统的稳定性判据。

(13)
证明:子系统(11)的特征方程可以写为如下形式:
fi(λ)=a0(λ)+a1(λ)e-λτ
(14)
其中:a0(λ)=λ2,a1(λ)=γi(λ+1)。
定义辅助特征函数Fi(Wi):
Fi(Wi)=Re(a0(iαi))2+lm(a0(iαi))2-
Re(a1(iαi))2-lm(a1(iαi))2
(15)
(16)

(17)
解方程组得到式(11)的时延边界为(13)。

3 仿真结果与分析
为了验证所提出通信时延下UAV/UGV混合编队稳定性分析方法的有效性,使用由3架UAV和3辆UGV构成的混合编队进行仿真。混合编队的通信拓扑如图1所示。

图1 UAV/UGV混合编队的通信拓扑
图1所示通信拓扑对应的L*为:
L*的特征值为γ1=13.392 3,γ2=9.464 1,γ3=5.531 9,γ4=1.280 3,γ5=2.535 9,γ6=3.795 6。所有的特征值均大于零,满足引理1。

接下来,分三种情况验证定理1的正确性。三种情况的时延大小有差异,分别为:1) 时延略小于边界值,τ=0.110 0 s;2) 时延等于边界值,τ=0.111 4 s;3)时延略大于边界值,τ=0.112 0 s。
情况1:τ=0.110 0 s
UAV/UGV混合编队的偏航角和偏航角速度变化曲线分别如图2、图3所示,偏航角误差和偏航角速度误差曲线分别如图4、图5所示。UAV/UGV的偏航角在50 s之内趋近于控制目标80°并保持不变,偏航角速度趋近于0,偏航角误差、偏航角速度误差也均在50 s内趋近于0。由此可知当通信时延τ=0.110 0 s时,UAV/UGV混合编队控制系统是稳定的。

图2 τ=0.110 0 s时的偏航角
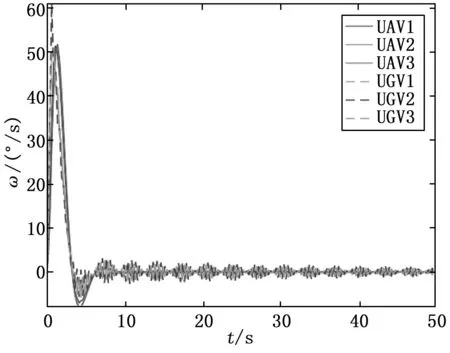
图3 τ=0.110 0 s时的偏航角速度
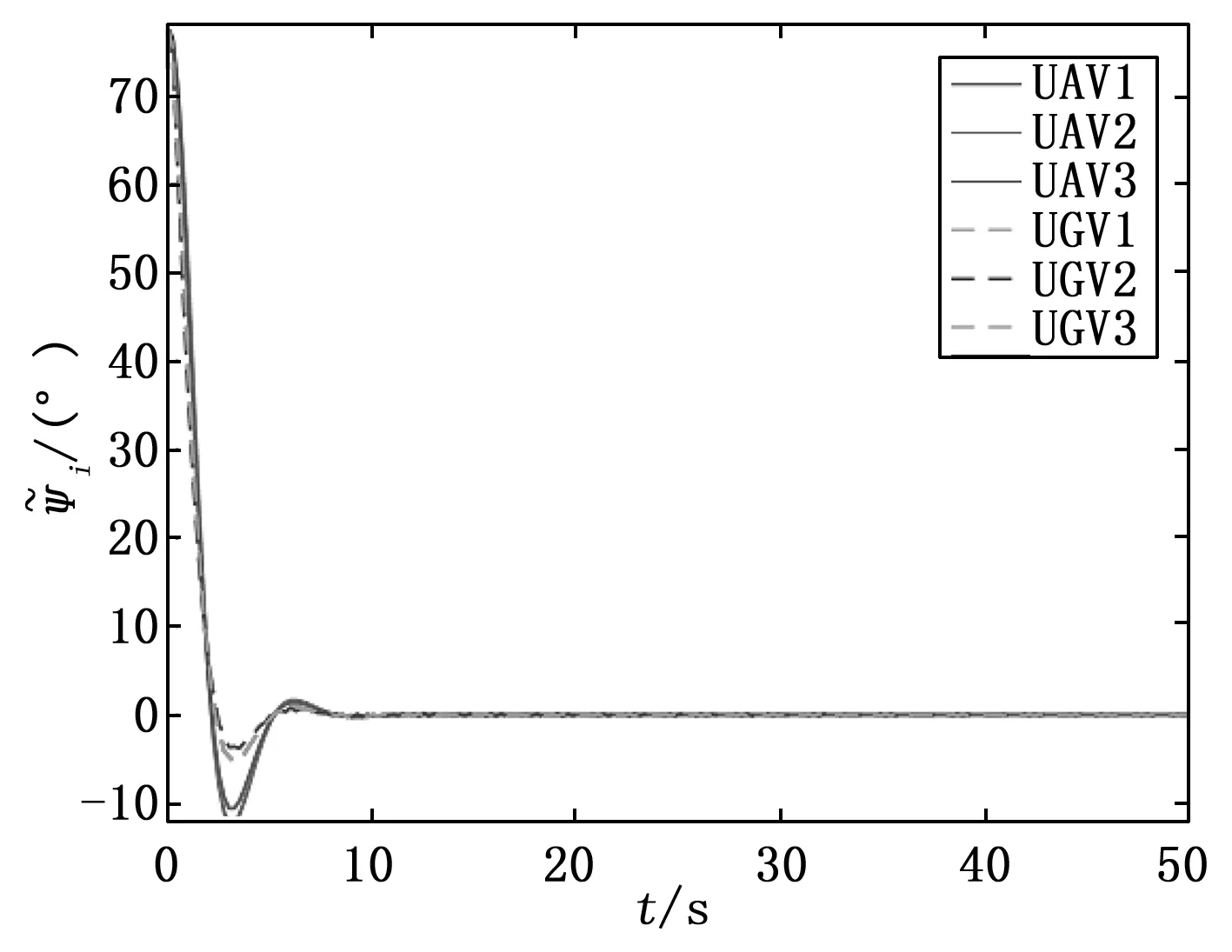
图4 τ=0.110 0 s时的偏航角误差
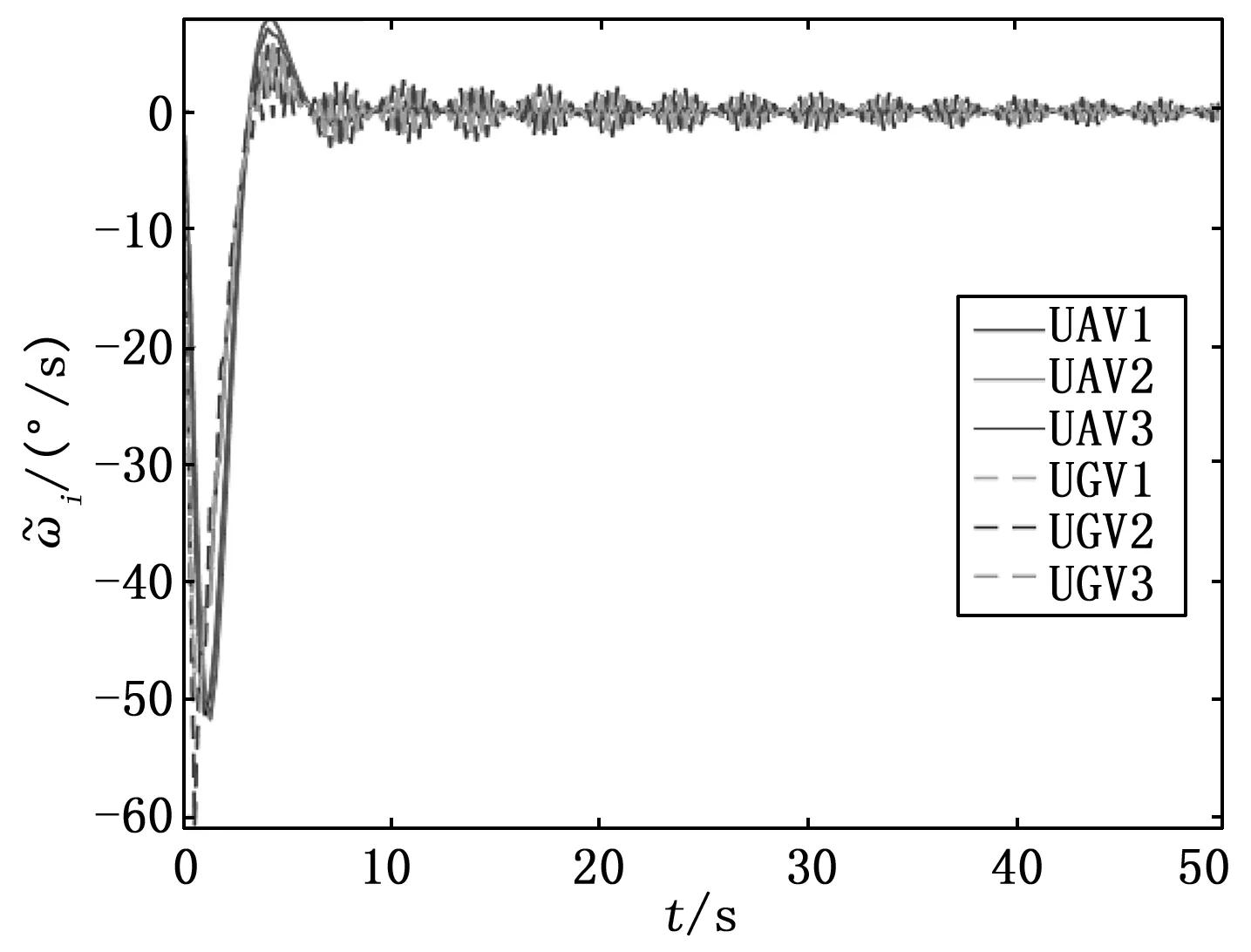
图5 τ=0.110 0 s时的偏航角速度误差
UAV/UGV混合编队的OXY平面运动轨迹如图6所示,三维运动轨迹如图7所示。UAV/UGV混合编队系统在50 s内达到稳定状态。

图6 UAV/UGV混合编队的OXY平面运动轨迹
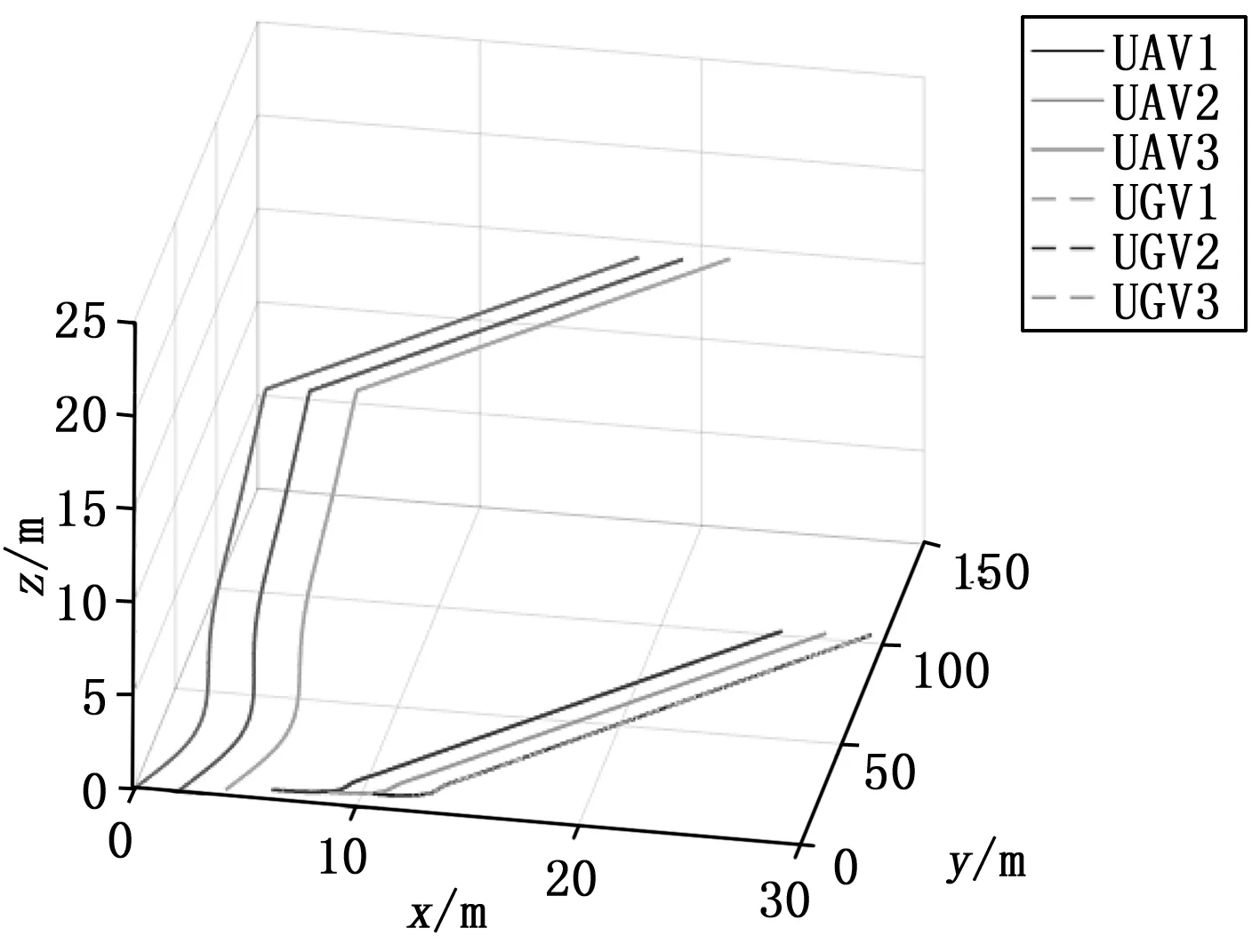
图7 UAV/UGV混合编队的三维运动轨迹
情况2:τ=0.111 4 s
UAV/UGV混合编队的偏航角误差和偏航角速度误差分别如图8、图9所示。此时,系统的状态呈现等幅振荡,UAV/UGV混合编队控制系统临界稳定。
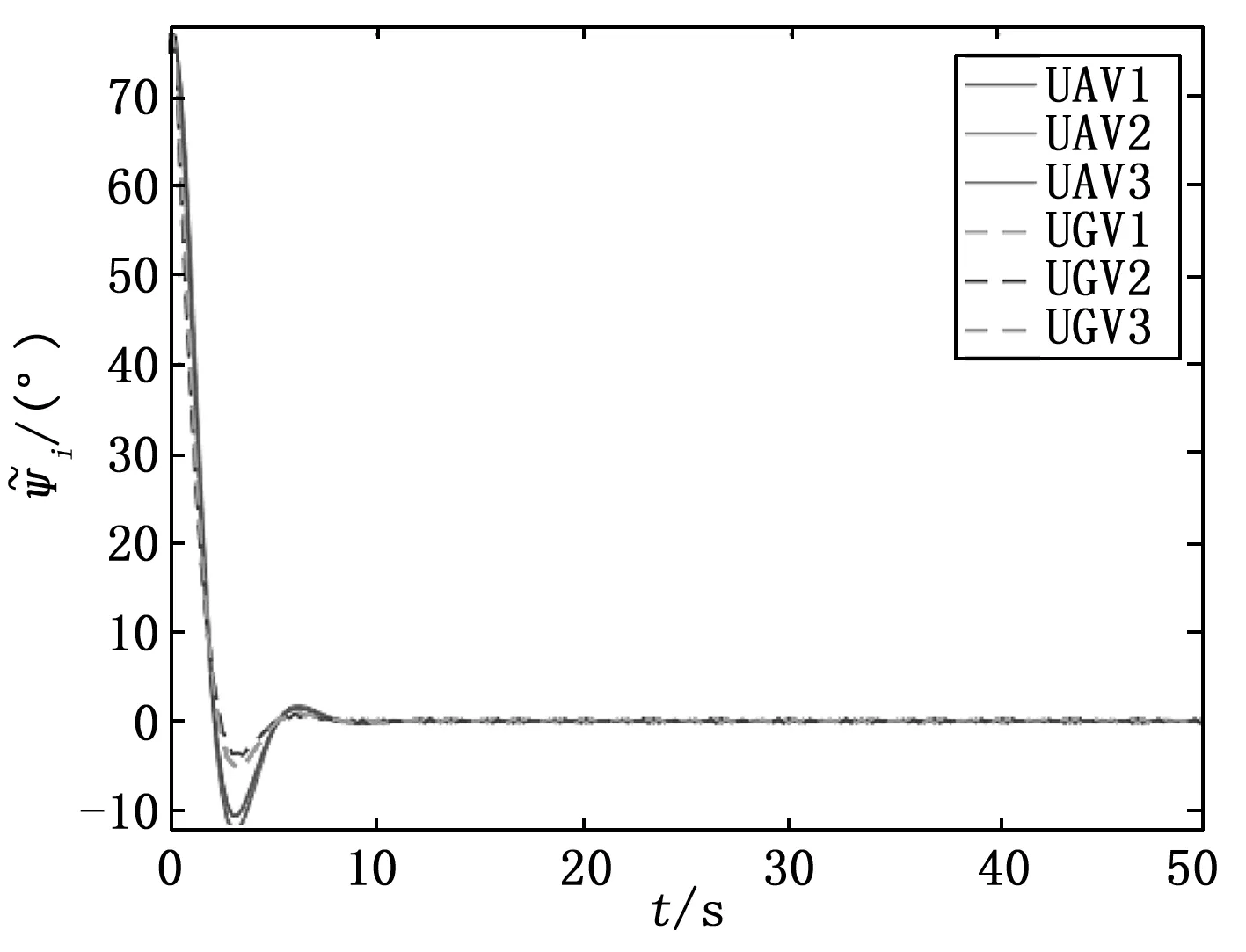
图8 τ=0.111 4 s时的偏航角误差
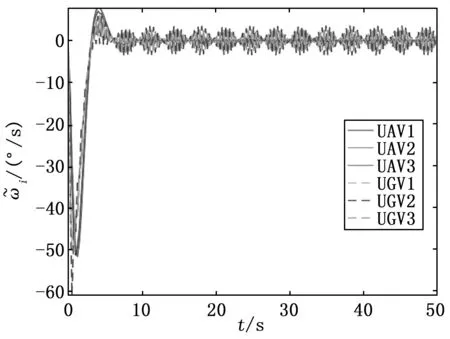
图9 τ=0.111 4 s时的偏航角速度误差
情况3:τ=0.112 0 s
UAV/UGV混合编队的偏航角误差和偏航角速度误差分别如图10、图11所示。此时,混合编队的偏航角误差、偏航角速度误差曲线均发散,UAV/UGV混合编队控制系统不稳定。
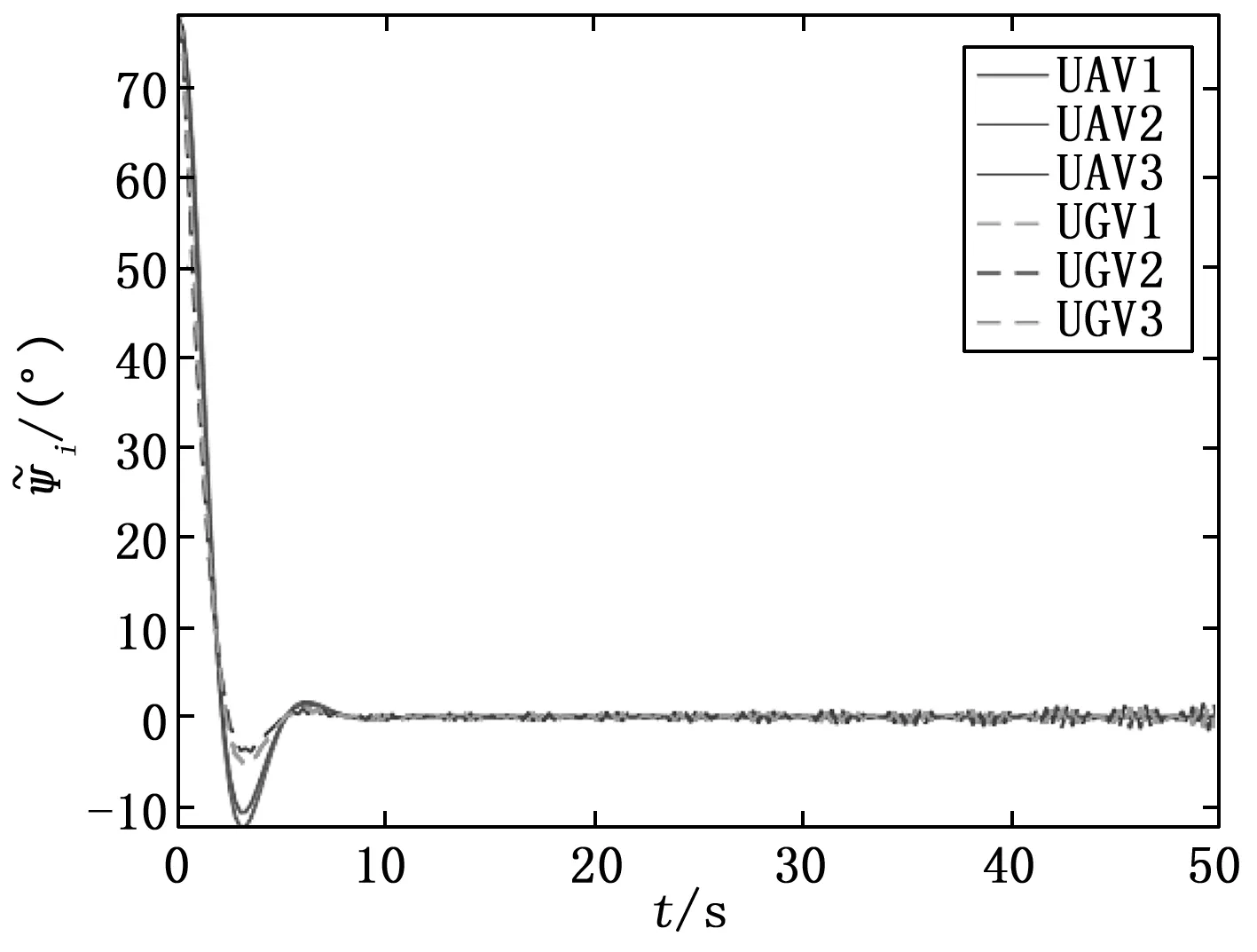
图10 τ=0.112 0 s时的偏航角误差
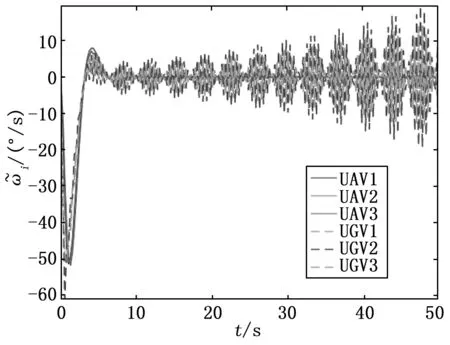
图11 τ=0.112 0 s时的偏航角速度误差
上述三种不同情况的仿真结果表明,定理1的时延边界计算方法是正确的,所提出的通信时延下UAV/UGV混合编队稳定性分析方法是有效的。
4 结束语
针对通信时延下的高维异构UAV/UGV混合编队控制系统,本文提出了系统稳定的充分必要条件,给出准确时延边界的计算方法。建立了考虑异构特性的UAV/UGV混合编队模型,对UAV群组、UGV群组分别设计了基于信息一致性的分布式控制器。利用矩阵相似变换,将高维异构的UAV/UGV混合编队控制系统进行降维拆分,极大地降低了稳定性分析的解析难度和运算量。证明了只存在一个时延区间可以令编队稳定,并利用辅助特征函数法推导了准确的时延边界。最后,通过三组仿真验证了所提出稳定性分析方法的有效性。