一种用于GLS机载设备适航验证的模拟器设计
2022-02-15钟伦珑樊振东张卓轩
钟伦珑, 樊振东, 张卓轩
(中国民航大学 智能信号与图像处理天津市重点实验室,天津 300300)
在所有飞行阶段中,进近着陆过程是最复杂和最危险的。目前,民航中引导飞机着陆的主要方式是仪表着陆系统(instrument landing system,ILS)。ILS是一种陆基无线电导航系统,机载设备接收陆基电台辐射的航向波束和下滑波束,计算出与固定下滑道的水平和垂直相对偏离,控制飞机使这种偏离为0,从而引导飞机沿固定下滑道进近。但ILS存在频道少,对场地敏感度高,只能提供单一直线下滑道以及成本较高等缺陷。为克服ILS的缺点,航空业提出计算飞机绝对位置,然后与虚拟下滑道比较引导着陆的方法,即卫星着陆系统(GBAS landing system,GLS)方式。GLS是一种基于空间导航卫星提供基本定位信息,以及由陆基增强系统(ground-based augmentation system,GBAS)进行导航性能增强的精密进近着陆系统,机载设备计算增强后的定位信息,并由地面提供的运行信息模拟出虚拟下滑道,由这些信息引导飞机着陆,能弥补ILS运行成本高和对地面环境要求高的缺陷,并且能够提高机场终端区容量[1]。国际民用航空组织(international civil aviation organization,ICAO)已将GLS定为新一代主用着陆导引系统,按照运行能力分为CAT I/II/III类系统[2]。2009年,美国Honeywell公司CAT I类GBAS系统是首个获得认证的GBAS系统[3]。
适航验证是机载设备获得在飞机上应用许可的必要环节[4]。符合性方法是获得所需的证据资料以验证设备是否符合相应适航条款的手段,可依据设备和条款的不同,选用不同的方法,并遵循可用简便方法验证的适航条款绝不用复杂方法的原则[5]。如适航条款要求机组对自动驾驶仪的超控必须是安全的,可以通过分析计算、安全性评估和飞行试验验证自动驾驶仪对条款的符合性[6]。类似地,在装机进行飞行实验之前,依据适航条款要求,GLS机载设备也需要进行实验室实验、工程模拟和地面实验等测试,在这些过程中需要一套满足适航验证需求的模拟器,按照规范要求对GLS机载设备的功能以及精度进行测试,验证后的指标即可为后续的飞行实验提供保障。本文针对用于GLS机载设备适航验证的模拟器设计需求,设计了一种用于GLS机载设备适航验证的模拟器。
1 适航验证需求分析
1.1 GLS机载设备适航验证技术
GLS主要由卫星星座、GLS机载设备和GBAS地面基站3个部分组成,分别对应空间、机载和地面组成部分,设计目标是满足不同类别(CAT I/II/III类)进近着陆标准要求[7]。GLS导引信号相关标准规范如图1所示,与着陆导引信号生成相关的功能性能需求,3个部分分别有不同的标准规范要求:① 卫星星座部分发送用于定位测速定时的空间信号,相关的文件主要是空间信号接口控制文件(interface control document,ICD),如列入ICAO四大核心星座GPS的ICD文件ICD-GPS-200C、北斗ICD文件BDS-SIS-ICD;② GLS机载设备是完成CAT I/II/III类进近着陆导引的重要设备,美国联邦航空局颁布了和设备两大功能相关的技术标准规定(TSO-C161、TSO-C162),具体的性能和符合性手段可参照美国航空无线电技术委员会适航标准DO-253要求;③ GBAS地面基站可为机场附近的GLS机载设备提供卫星完好性、伪距差分修正等信息以及GLS下滑道播送,各国局方对GBAS地面基站的信号接口文件主要参照美国联邦航空局的命令文件[8]。在GLS机载设备的适航验证中,需要考虑这些标准规范形成验证环境以及对导引性能进行审定。
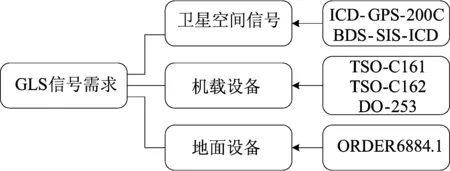
图1 GLS导引信号相关标准规范
为确保飞机的设计、制造、运行等环节达到一定性能标准,民航业提出了众多适航规范和标准,要求各个环节进行对应的适航验证。而飞机上装载的机载设备和零部件审定,可以随机审定,也可以取得相对应的技术标准规定TSOA认定,证明机载设备和零部件达到一定的性能标准[9]。对机载设备的申定过程需要包括前述可适用的适航规范和标准。
在对GLS机载设备是否符合特定适航条款的验证中,可选择的符合性方法见表1所列[10],而适航验证技术就是符合性方法所运用的技术。按照不同的设计阶段,对GLS机载设备的适航验证可采用实验室实验、工程模拟器实验和飞行实验等符合性方法。在此类方法中,构建一个可以模拟外部信号环境的模拟器这种适航验证技术是很重要的。

表1 适航验证符合性方法
1.2 GLS机载设备最小性能要求
在适航符合性验证中,需要按照适航标准规范要求对GLS机载设备的功能以及性能进行验证。按照功能划分,GLS机载设备可分为与地面接口的甚高频数据广播VDB子系统和定位与导航PAN子系统。VDB子系统通过与航向道共用的甚高频天线,接收地面站播送的差分修正信息和下滑道信息;PAN子系统综合接收到的卫星定位信息与VDB子系统输出的修正信息以及下滑道信息,计算更精确的定位信息及与所选下滑道的偏移信息,导引飞机进行进近着陆。机载设备接收到的卫星定位信息误差部分可由VDB子系统差分修正信息消除,不能消除的其他误差也应符合标准规范要求。
GLS机载设备的性能需依照DO-253文件要求,对GLS机载设备的测试过程包括如下3个步骤:① 待测设备需在实验室环境下进行包含设备外壳强度、内部电子芯片性能、电源输入大小等与设备物理性质相关的测试;② 设备需要进行台架测试,即在实验室或仿真的真实环境中,对设备定位功能、进近下滑道偏离输出功能及定位能力进行测试,该测试旨在飞行测试前,对设备是否满足所需的功能进行验证;③ 对照性能要求规范(如基于性能导航PBN规范)验证设备的性能。依据ICAO附件十,GLS机载设备输出的精度、完好性和可用性等性能需满足相应类别的要求,具体见表2所列[11]。表2中,L为水平方向数值;V为垂直方向数值。

表2 不同类别精密进近导航性能需求
除了上述测试和最后的飞行测试之外,GLS机载设备的VDB子系统及PAN子系统分别需要满足自身的测试要求,包括在整体或功能性缺失下的风险值,以及硬件失效后的误导率。该风险值与定位误差及卫星完好性、地面设备可用性都有关。
1.3 GLS适航验证模拟器需求分析
在对GLS机载设备依据不同符合性方法进行适航测试时,主要考虑GLS机载部分的适航性验证需求(最小性能要求),即基于性能导航的标准和子系统功能测试,如图2所示。
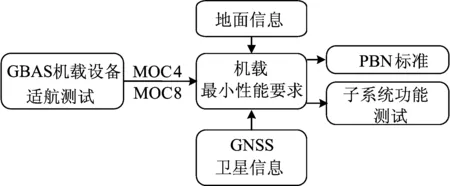
图2 机载设备适航验证需求分析图
为了验证最小性能,需要构建GLS机载设备工作的外部环境,包括:VDB子系统接收到的GBAS地面基准站差分修正信号等信息;PAN子系统在定位时接收到的卫星信号,以及卫星信号在传播过程中引入的各种误差。
2 系统设计
在上文对适航验证技术和符合性方法分析的基础上,结合中国民航局颁布的规范性文件《卫星着陆系统GLS运行标准指南》第7.2节中对运行GLS的机载设备功能要求,进行GLS机载设备适航验证,采用实验室实验等符合性方法,重点是搭建可模拟GLS机载设备外部运行环境,能仿真各种误差源和失效情况的适航验证模拟器。
2.1 总体设计方案
从适航验证需求出发,设计出模拟器功能方框图如图3所示,整个模拟器的功能由基础信息设置、导航激励信号生成、参数处理显示3个模块实现,各个模块又由若干子模块组成。为支持整个模拟器的运行,系统还包含导航数据库、大气环境数据库和地形数据库。

图3 模拟器功能方框图
基础信息设置模块实现机场信息、进近程序信息和外部环境仿真模型的管理,提供导航激励信号生成模块所需的环境信息和数据。
导航激励信号生成模块利用进近程序信息驱动飞行模拟模块生成仿真航迹,通过全球导航卫星系统(global navigation satellite system,GNSS)卫星星座模块和GBAS地面站模块实现卫星空间信号和地面站伪距差分修正和下滑道信息VDB信号的生成,并提供给GLS机载部分。GLS机载设备PAN子系统利用卫星空间信号数据和VDB信号数据实现GBAS定位和类ILS进近信息生成,并将其数据供给GLS引导显示模块。模块中涉及到的外部环境模型由基础信息设置模块控制下的外部环境数据库提供。
参数处理显示模块利用模拟器各子模块和数据库进行运算,生成相关参数数据。此模块的搭建为了观察程序设计是否符合适航测试标准,按照基于PBN测试和进近着陆阶段实际情况,将生成的参数分成信号类参数(如信号信噪比等)和信息类参数定位(如定位精度、卫星可见星数量等)。模拟器本身不涉及性能评估,信号的精度、完好性、连续性和可用性等信息类参数设置此处不作讨论。此外,由基础信息设置模块设置的环境参数信息也将通过此模块显示在人机界面上。
2.2 外部环境仿真模型设计
关于导航信号生成和参数处理算法,与普通卫星模拟器一样,具体可参考文献[12],此处模拟器更关键的是生成满足验证需求的外部环境。由于GLS机载设备是基于卫星信号进行定位的,GLS机载设备外部误差环境主要和PAN子系统接收到的卫星信号在传播时引入的误差有关,如大气延迟以及多径造成的延迟等因素。同时,GBAS地面基准站收到的卫星信号也受类似因素影响。
参照相关适航标准规范,外部环境仿真模型设计如图4所示,主要考虑卫星信号的电离层、对流层、多径误差以及伪距修正量的残差。其中:电离层延迟误差采用国际参考电离层模型;对流层误差采用Hopfield模型;多径误差采用DO-247模型。由于GBAS发出的伪距修正量会补偿部分GLS机载设备接收到的卫星信号误差量,在实现过程中有些环节予以简化。例如:电离层残差在机场环境对机载系统定位影响不大,采用简化后的电离层模型;对流层残差采用DO-253模型;多径残差采用值拟合的方式,将多径残差总结为均值为0的高斯分布;其他误差的残差模型简化为高斯白噪声。

图4 外部环境仿真误差模型设计
在进近着陆阶段,除了考虑以上与卫星信号的外部环境模拟外,还要是考虑传播环境对VDB信号造成的影响,这将影响最终GLS机载设备输出参数的性能。影响VDB子模块的因素主要是复杂地形造成的遮蔽角,即从天线中心点和该点所在水平面向上算起的电波信号被地形遮挡的垂直张角。确定基站经纬度坐标和高度信息,根据地形数据信息计算360°方位上的遮蔽角θs为:

(1)
其中:h为地面某点的高度;d为该点到VDB基站的距离;hd为基站天线的高度;Re为地球等效半径;λ为天线的工作波长,将某一方位上的遮蔽角最大值作为基准遮蔽角。
2.3 软件设计
软件主要实现图3所示的功能,按照分层程序设计思想[13],模拟器软件由数据层、接口层、应用层3层结构组成,如图5所示。
数据层依据接口层转发的应用层指令生成导航数据,为系统提供数据支持,包括GLS仿真数据和飞行仿真数据模块。接口层位于数据层与应用层之间,转发应用层指令至数据层,转换处理数据层的数据并发送到应用层,包括GLS动态传输数据链和坐标转换动态链。其中:GLS动态传输数据链负责应用层和数据层之间的通信,以及将坐标转换动态链转换数据发给应用层;坐标转换动态链对坐标相关数据提供直角坐标和地理坐标相互转换功能。应用层对应图3中所示的模拟器3大功能,分为基础信息设置、导航激励信号生成和参数处理显示3个功能模块。在数据层和接口层提供的服务下,应用层以Windows窗体的形式实现人机交互。

图5 模拟器软件设计
具体程序设计时,数据层的实现利用了ADO.NET技术。作为一种面向对象类库,ADO.NET允许和不同类型的数据源以及数据库进行交互。模拟器将包括外部环境模型数据在内的不同更新率和不同协议的数据存在数据库中,并通过接口层传输给应用层。
接口层的实现利用了Python脚本。接口层作为应用层和数据层的连接口,将数据库中的数据按照不同协议分别处理。
以下重点说明应用层的模块设计。
(1) 基础信息设置模块。基础信息设置模块负责整个系统的输入界面主要通过Windows窗体界面对后台数据库进行存储和管理等操作,实现机场信息、进近程序信息和外部环境仿真模型的管理。
在程序实现上,基础信息设置模块利用ADO.NET技术访问数据库,结合SQL语句,通过以C#编译的Windows窗体界面,实现机场与外部环境信息仿真模型相关数据的添加、修改、删除等操作,设置界面如图6所示。
图6 基础信息设置界面
(2) 导航激励信号生成模块。导航激励信号生成模块利用航迹数据驱动飞行模拟模块生成仿真航迹,通过GNSS卫星星座模块实现卫星空间信号生成,由GBAS地面站模块生成包含地面站伪距差分修正和下滑道信息的VDB信号,并提供给GLS机载部分。GLS机载设备PAN子系统利用卫星空间信号数据和VDB信号数据实现GBAS定位和类ILS进近信息生成,并将其数据供给GLS引导显示模块。此模块所有的外部环境模型由外部环境数据库提供。
GNSS卫星星座模块按照ICD-GPS-200C文件以广播星历数据库的形式存在于GBAS数据库[14]中。
GBAS地面站模块按照ORDER 6884.1进行位置设计。此外,为了仿真故障等实际情形, GBAS地面站模块需要输出一致完好性参数B。完好性参数B值体现了地面站模块是否出现故障或其信息是否可用,定义[15]如下:
(2)
其中:下标i为卫星的编号;j为基准站的编号;n表示第n颗卫星;Pi,j为第j个地面基准站发布的第i颗卫星的伪距修正值;M为地面基准站的数目;Pi,n为第n号基准站接收第i颗卫星的信号而计算出的第i颗卫星的伪距修正值;Bi,j为第j号基准站接收第i颗卫星的信号而获得的B值,是利用多个地面基准站的伪距修正量构造的参考值。
为了满足软件测试的需求,参照DO-253和《卫星着陆系统GLS运行标准指南》有关GLS机载端的功能描述,在导航激励信号生成模块中内建立GLS机载设备的仿真模块,实现了GBAS定位和GLS适航测试及导航参数的生成。此模块可以在测试实际系统时关闭。
在程序实现上,导航激励信号生成模块利用Matlab/Simlink中六自由度飞机气动模型生成仿真飞行航迹,利用Python脚本实现GBAS系统的仿真和定位数据输出。
(3) 参数处理显示模块。参数处理显示模块利用模拟器各子模块和数据库进行运算,生成相关参数数据。生成的参数分成信号类参数(例如信号信噪比等)和信息类参数(例如定位精度和卫星可见星数量等)。因为模拟器不涉及性能评估,所以不输出系统完好性、连续性和可用性等信息类参数。
在程序实现上,利用C#中ListView控件实现信号参数的列表显示,有利于GLS机载设备适航测试的数据观察和记录。
3 测试结果
测试所用航迹数据是2018年2月26日执飞机型为A320neo的武汉-北京航班航线的进近着陆阶段航迹数据及外部环境数据。将进近程序和内建GLS机载设备仿真程序调为CAT I,此时相关数据顺利生成。
为了验证模拟器是否能够按照程序设定生成适航验证环境,将GLS机载设备导航定位精度要求和机载设备仿真模块的实际定位精度进行对比。
设定已知基准点和连续定位时间为24 h,并将相关GLS定位误差数据导入Matlab。取绝对值后的水平位置误差和垂直位置误差如图7、图8所示。
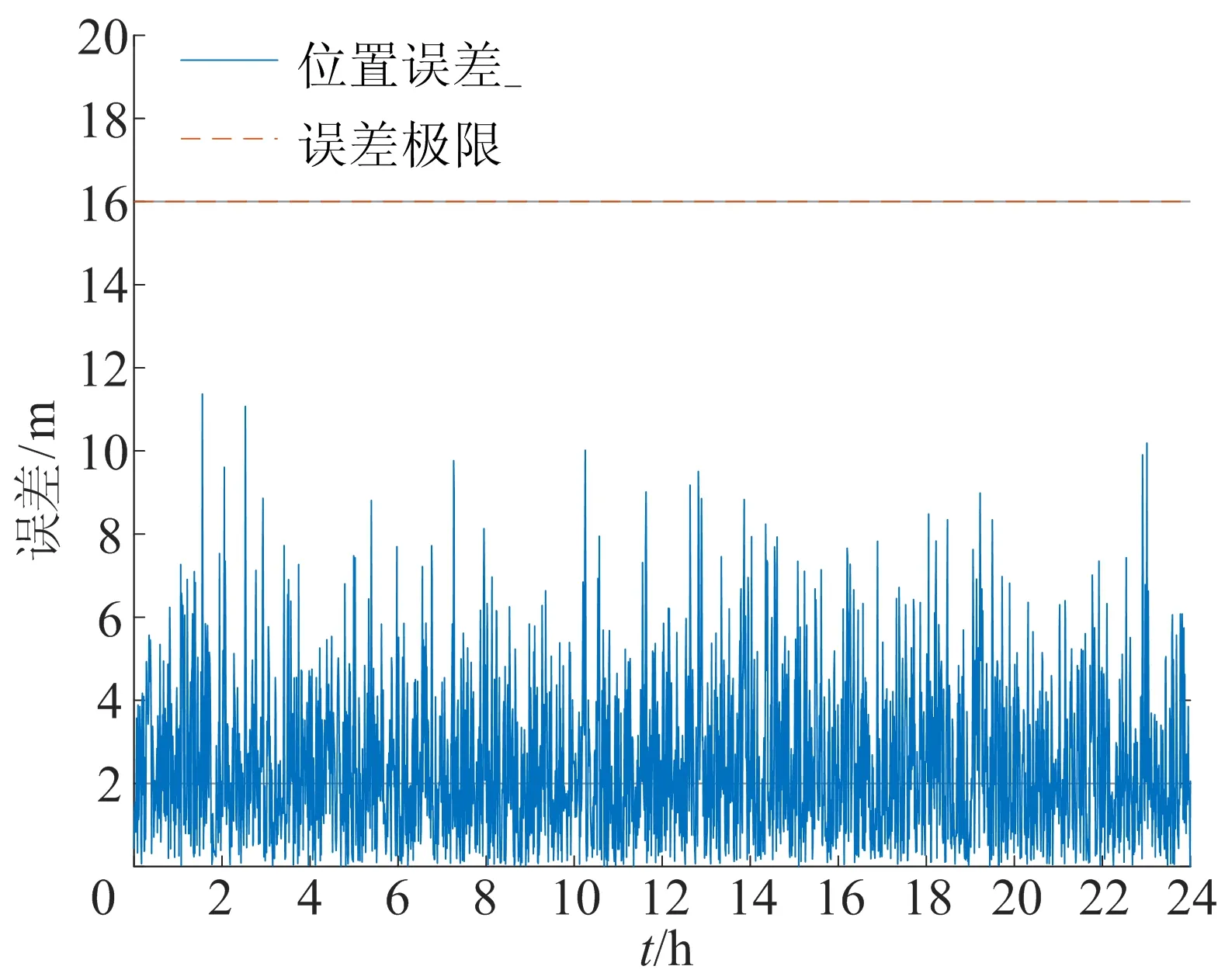
图7 水平定位误差

图8 垂直定位误差
对比表2所示的CAT I精度标准(水平误差极限16.0 m,垂直误差极限7.7 m),可见GLS定位精度符合模拟器程序设定要求。这也表明了模拟器能够按照程序设定生产相应外部适航验证环境。
4 结 论
为满足卫星着陆系统机载系统适航验证需求的实际需求,设计了一种用于GLS机载设备适航验证的模拟器。通过内建GLS机载设备仿真实验验证,该模拟器成功生成适合GLS机载设备的适航验证环境,并成功输出用于适航验证和性能评估的相关信息参数。
模拟器可在减少成本的前提下,实现导航激励信号的仿真生成及外部环境的仿真,这将大大有利于GLS机载设备适航评估地面系统的设计。由于条件限制,此次设计的测试全部在软件仿真环境下进行,并没有结合硬件系统,这也是本文下一步的工作。