隧道灭火机器人的结构设计及射流轨迹分析
2022-02-14舒启林姜元波
舒启林,姜元波
(沈阳理工大学 机械工程学院,辽宁 沈阳 110159)
近年来,我国新建交通隧道的数量逐年增加,隧道火灾风险不断增大。由于隧道空间结构密闭、通道较长、不易疏散,如果发生火灾,高温空气、浓烟就会迅速充斥隧道,给救援和灭火工作带来极大困难,很容易造成重大的生命财产损失。
姜涛等设计了一款轮式和步态自由切换的混合式消防机器人[1]。其实验表明,该机器人平衡率达98.8%,可以适应火场的复杂情况。陈亮等设计的适应能力较强的双摆臂隧道救援用履带式机器人,可以在复杂的隧道环境中稳定工作[2]。孙宁等设计的消防灭火机器人主要由机器人本体、消防水炮、摄像机、水幕喷淋装置、传感器及手持遥控终端组成,其性能稳定、机动灵活,可代替消防人员进行灭火作业[3]。针对射流轨迹的预测问题,卞永明等是在建立射流轨迹数学模型后通过模糊控制算法控制水流落点的[4];Wu等考虑到射流会在喷出瞬间卷入空气,提出了融入偏转角的空气阻力模型,经实验验证,其最大射程误差仅为8.6%[5];Alcan等基于粒子阴影属性提出了一种用于跟踪射流中气泡和液滴的方法,使液滴的平均跟踪精度达到了87%[6]。
本文将基于牛顿第二定律建立水体射流轨迹微分方程,以工作压力、俯仰角、风速风向为研究对象,分析不同工况下射流轨迹的变化趋势,以便进行火源点的精确定位,使设计的隧道内悬挂式轨道灭火机器人(简称隧道灭火机器人),可以在导轨上自由移动,以避免车辆等障碍物的影响。
1 隧道灭火机器人的结构设计
1.1 采用隧道灭火机器人的灭火系统组成
采用隧道灭火机器人的灭火系统组成如图1所示。它以隧道为载体,在隧道两侧墙壁上安装导轨,导轨上悬挂若干台灭火机器人。灭火机器人上的火源探测器能对过往车辆进行实时监测。当监测到火情时,灭火机器人向控制室发送火情报警信号,同时根据火灾大小调动一台或多台灭火机器人向火源位置移动。控制室收到火情报警信号后,可以通过操作台对机器人下达指令,进行人工灭火操作;若不进行人工操作,机器人则会根据程序自主进行灭火作业。
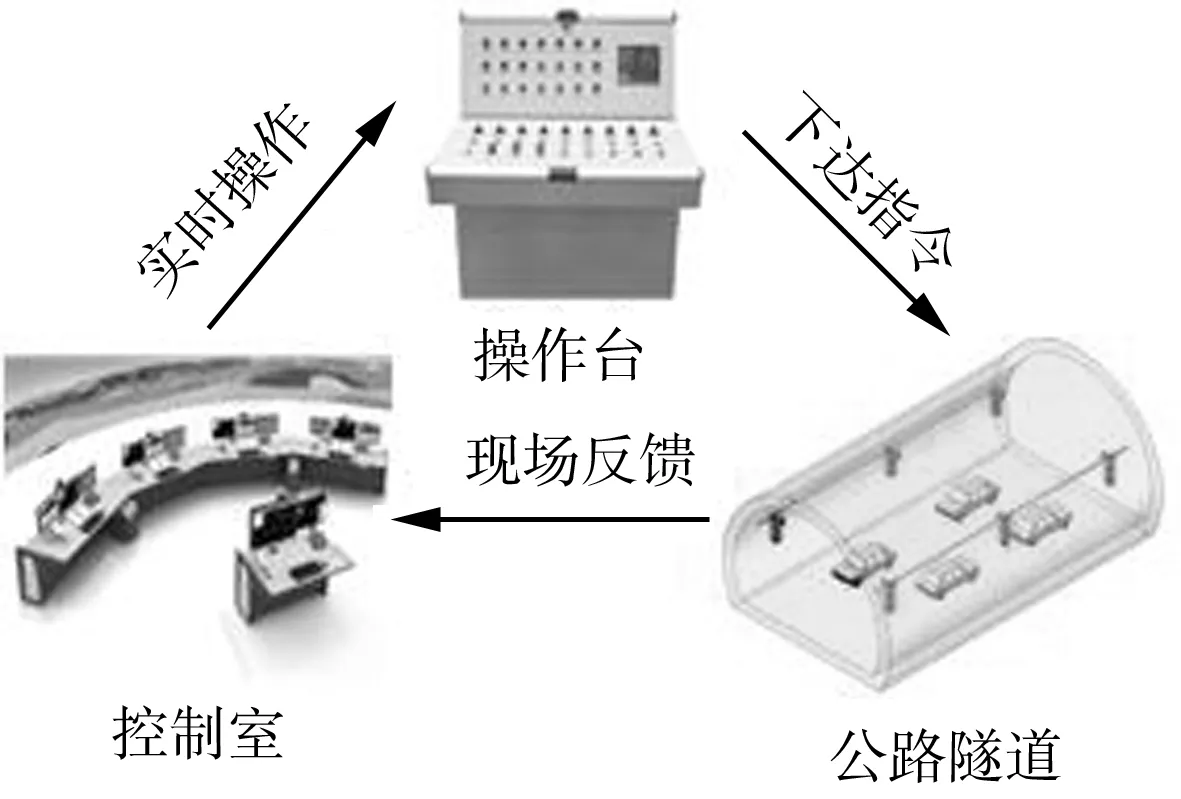
图1 灭火系统组成
1.2 灭火机器人的机械结构设计
图2所示为灭火机器人机械结构的三维模型。隧道灭火机器人主要由基架、连接板、行走驱动电机、行走轮、灭火剂钢瓶、喷头等组成。
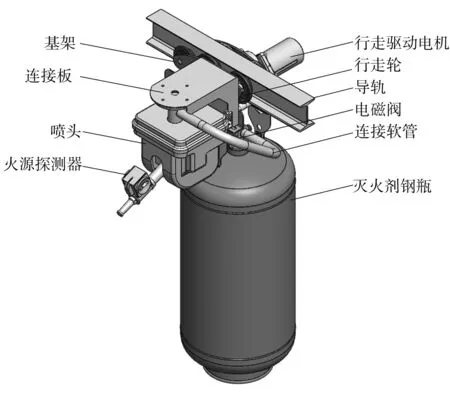
图2 灭火机器人机械结构的三维模型
基架上装有行走轮、行走驱动电机、灭火剂钢瓶和安装喷头的连接板。通过软管可将水引入喷头。隧道灭火机器人通过导轨悬挂在隧道内。无火灾时,火源探测器处于监测状态,机器人静止不动;当监测到火情时,行走驱动电机通过行走轮带动灭火机器人向火源位置移动,接近火源位置时停止移动。喷头上的水平步进电机能通过齿轮间的啮合,让灭火机器人的喷头(图3)发生周向转动。装在喷头上的火源探测器发现火源信号时,水平步进电机转动并开始计数,在火源信号消失时停止计数,水平步进电机反转到一半计数值位置,即完成火源水平方向的中心定位;与此同时,启动俯仰步进电机进行相同操作,完成火源垂直方向的中心定位。通过双重旋转定位火点后,灭火剂钢瓶出口处的电磁阀开启,进行喷水灭火作业。

(a) 传动机构
1.3 火源探测器的结构设计
火源探测器由探测器外壳、紫外传感器、红外传感器组成(图4)。探测器上安装的紫外传感器用于探测火情。当火源探测器监测到火情时,灭火机器人向火源方向移动,通过内部电路将紫外传感器接收的光信号转变为电信号,用于判断机器人与火源的大致距离(距离越近,所产生的电信号越大);同时,火源探测器内部的两个红外传感器分别通过外壳上的水平定位狭缝和垂直定位狭缝,接收火焰的红外信号,实现对火源的精准定位。
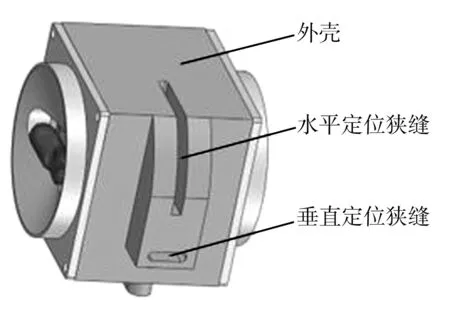
(a) 外部结构
灭火机器人完成火源定位后,水体从喷嘴射出。理论上,射流轨迹应呈直线状态,但实际上在空中受重力及空气阻力的作用,射流轨迹会发生弯曲变形,导致水流落点与火点的不重合,因此需要对影响水流落点的因素进行分析,以确定符合实际要求的射流轨迹。
2 隧道灭火机器人射流轨迹的理论建模
影响射流轨迹的因素是多方面的,主要有:喷嘴的结构参数(喷嘴结构不同,射流水体的能量损失和速度梯度就不同)、射流的输入能量(它决定于初始射流速度和喷头俯仰角,而射流速度由压力和流量所确定)、外界因素(如风速风向、空气阻力等)[7]。其中,输入能量和外界因素对射流轨迹有明显的影响。基于射流轨迹所受各种因素的影响,同时考虑到隧道内部结构密闭而需要通风的实际情况,本文将重点分析工作压力、喷头俯仰角、风速风向对射流轨迹的影响。
2.1 射流水体的受力分析
水体受到压力从喷嘴射入空气后,受到水体自身表面张力、黏性力、重力、风力和空气阻力的作用,而逐层剥落,最终以各种粒径的水滴形式在空中运动。因无法对水体在空中的破碎情况进行准确分析,本文作出下列假设:①水滴在喷嘴出口处已经形成,且直径大小不同;②水滴在空中的形状近似为球形;③水滴之间互不干扰。
取喷嘴处形成的最大直径水滴为研究对象,按质点运动和弹道学理论,对水滴进行受力分析。分析认为,三维空间的射流运动可分解为垂直面和水平面的运动,二者互不干扰[8]。水体中水滴的受力情况如图5所示。图5中:F为空气阻力;v为水滴的运动速度;mg为水滴所受重力;Fw为风的阻力(简称风力);α为风力与xOy水平面的夹角;β为风力与xOz垂直面的夹角;vxz、vxy分别为水滴在xOz垂直面和xOy水平面的运动速度;θ为水滴运动方向与z轴负向的夹角;F1、F2分别为水滴受空气阻力在xOz垂直面和xOy水平面的分力;Fx、Fy、Fz分别为风力沿x轴、y轴、z轴的分力。

(a) 三维空间的受力分析
根据牛顿第二定律,可列出射流水体中水滴在垂直面的运动方程,即
(1)
式中,m为射流水体中水滴的质量。
射流水体中水滴在水平面的运动方程为:
(2)
水滴在垂直面的运动方向随着时间不断变化,水滴运动方向与竖直方向的夹角θ也不断变化。将式(1)化简并与式(2)组合,可得水滴在三维空间的运动方程组(也可称为射流轨迹微分方程),即
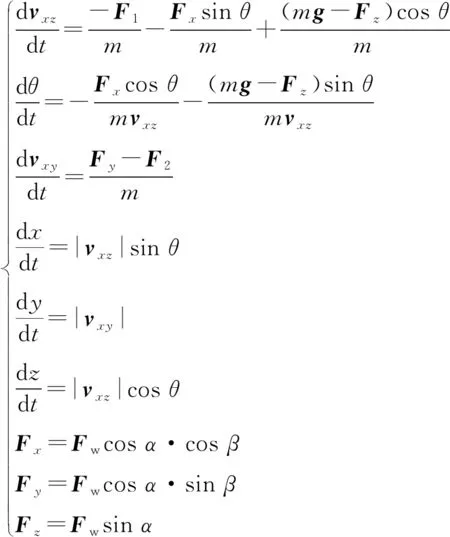
(3)
2.2 空气阻力的确定
水滴在空中的运动可近似为炮弹发射后的飞行过程。根据弹道学理论,水滴在空中运动所受空气阻力为:
(4)
式中:ρ为空气密度;A为水滴的横截面面积,A=πd2/4,其中d为最大水滴的直径;K为空气的阻力系数。
空气阻力由摩阻、涡阻和波阻三部分组成[9],但是水滴在空气中的运动速度远远小于200 m/s,并不会产生波阻。因此可认为,水滴在空中运动所受空气阻力由摩阻和涡阻两部分组成。空气阻力系数K的计算式为:
(5)
式中:Cf为摩阻;Cb为涡阻;Re为雷诺数。
射流水体在自身表面张力、黏性力、重力、风力和空气阻力的作用下,被逐渐破碎成直径不同的水滴。其中,直径较小的水滴只能运动到近处,而直径较大的水滴可能运动到远处。因此,计算最大直径水滴的运动距离,即可算出喷头的最远射程。最大水滴直径d的计算式[10]为:
d=2.3D0.831p-0.257
(6)
式中:D为喷嘴直径;p为工作压力(这里仅指工作压力的值)。
2.3 风力作用的确定
射流水体的动能随着它在空中运动时间的延长而逐渐减小,同时隧道内空气的流动会产生风,对射流水体的运动轨迹产生显著影响。因此,建立射流轨迹模型时需要考虑风力的作用。
风压是指垂直于射流方向的平面所受到的风的压力[11]。由伯努利方程可得风压Ww的计算式,即
(7)
式中,vw为风速。
根据压力与压强的关系,可求得水滴所受风的阻力Fw,即
(8)
3 射流轨迹微分方程求解与射流轨迹仿真
3.1 射流轨迹微分方程的求解
微分方程常用求解方法有梯形法、欧拉法、龙格库塔法等。其中,龙格库塔法因具有精度高、收敛快、稳定性好等优点而广泛应用。因此,本文针对式(3),采用变步长四阶-五阶龙格库塔算法ODE45的数值方法进行了求解。
根据文献[12],四阶龙格库塔计算式为:
(9)
式中:xi为当前区间的起点;yi为当前区间起点对应坐标;yi+1为当前区间终点对应坐标,也是下一区间起点的对应坐标;k1为时间段开始的斜率;k2为时间段中间点的斜率;k3为时间段另一中间点的斜率;k4为时间段终点的斜率;h为步长。
3.2 射流轨迹的仿真
初始条件为:喷头安装高度3.8 m,工作压力0.4 MPa。设定初始条件后利用Matlab软件进行仿真,可得到图6所示不同俯仰角θ0下的射流轨迹。
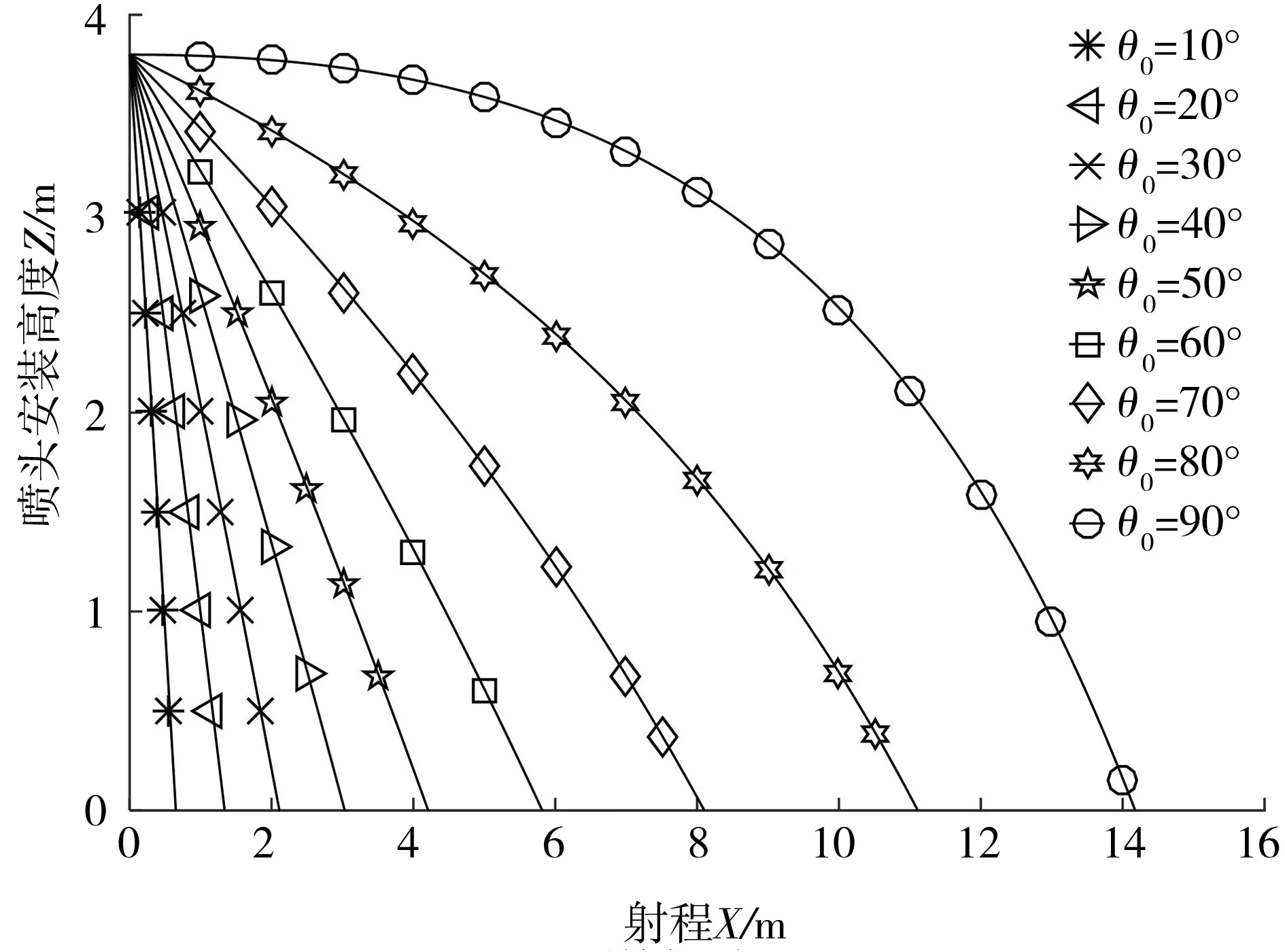
图6 仿真所得不同俯仰角θ0下的射流轨迹
从图6可以看出:在俯仰角θ0为0°~ 60°区间,射流轨迹呈直线状态,水滴在空中运动的方向无明显变化;在俯仰角θ0为70°~ 90°区间,由于射流水体受重力和空气阻力的影响比较大,水滴在空中运动的方向一直在变化,射流轨迹为类似抛物线的曲线状态[13]。
分析可知,图6中射流轨迹的趋势与实际情况基本相同。这说明了仿真的正确性,可将所建立射流轨迹模型用于射流轨迹影响因素的分析研究。
4 射流轨迹仿真结果的分析
对所建立射流轨迹模型和实际工况的分析可知,影响射流轨迹的主要因素为喷头俯仰角、工作压力、外界风速风向等。因此,本文采用Matlab软件,对射流轨迹受喷头俯仰角、工作压力以及外界风速风向的影响进行了仿真,得到了相应的仿真结果。隧道灭火机器人的灭火性能可通过射流轨迹在空中运动的最终落点来体现。因此,分析射流轨迹的变化就是分析水流射程的变化。这里将着重分析不同工况的水流射程变化规律。
4.1 不同俯仰角下的水流射程变化
设定喷头的初始安装高度为3.8 m,喷头俯仰角θ0为10°、20°、30°、40°、50°、60°、70°、80°、90°的9种工况,工作压力先后取0.4 MPa 、0.7 MPa 和1.0 MPa。不同俯仰角θ0下的水流射程变化曲线如图7所示。
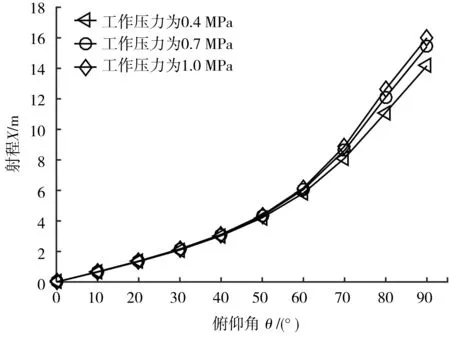
图7 不同俯仰角θ0下的水流射程变化曲线
从图7可以看出,当工作压力不变时,水流射程会随着俯仰角θ0的增大而增大;同时,在俯仰角θ0为0°~ 60°的区间内,射程随俯仰角θ0的增大而缓慢增大,并且不同压力下的水流射程基本上一样,曲线呈现重合状态;在俯仰角θ0为70°~ 90°的区间内,射程随着俯仰角θ0的增大有较大幅度的增加,且不同压力下的水流射程有明显变化,曲线不再重合。
4.2 不同工作压力下的水流射程变化
不同工作压力下的水流射程变化曲线如图8所示。

图8 不同工作压力下的水流射程变化曲线
从图8可以看出,在俯仰角θ0为0°~ 60°的区间内,射流轨迹呈直线状态,射程基本上不随压力发生变化;在俯仰角θ0为70°~ 90°的区间内,射程随着工作压力的升高有明显增加。
4.3 不同风速下的水流射程变化
设定风向与水平面平行,工作压力为1.0 MPa,喷头俯仰角θ0为90°,风速为0 m/s、1 m/s、2 m/s、3 m/s、4 m/s、5 m/s的6种工况,风向与射流平面的夹角在0°~180°(0°代表风向与射流方向相反,180°代表风向与射流方向相同)区间变化。不同风速下的水流射程变化曲线如图9所示。其中,(a)为射流水体在垂直面(xOz平面)内沿x轴方向运动产生的水平射程变化;(b)为射流水体在水平面(xOy平面)内沿y轴方向运动产生的横向漂移。这里以水平射程变化量与横向漂移共同反映水流射程的变化。
从图9(a)可以看出:当风速一定时,水平射程的变化量随着风向与射流平面夹角的增大而增大;风向与射流平面的夹角小于90°(属于逆风状态)且风向一定时,水平射程的变化量随着风速的增大而减小,风向与射流平面的夹角大于90°(属于顺风状态)且风向一定时,水平射程的变化量随着风速的增大而增大。
从图9(b)可以看出:当风速一定时,射流水体的横向漂移随着风向与射流平面夹角的增大而先增大再减小,在夹角为90°时达到最大;当风向不变时,射流水体的横向漂移随着风速的增大而增大,风速越大,横向漂移越明显。
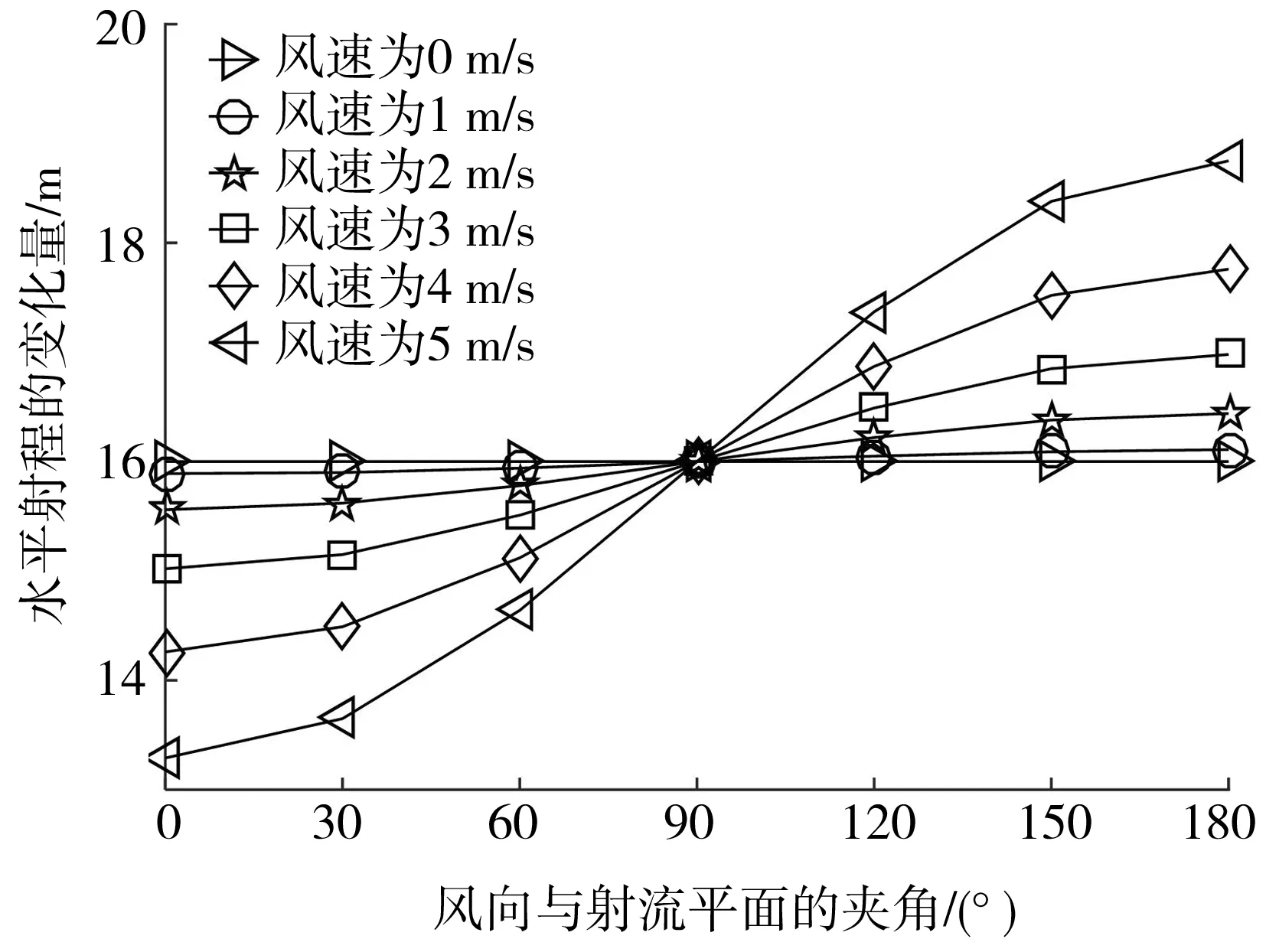
(a) 水平射程的变化
4.4 不同风向下的水流射程变化
不同风向下的水流射程变化曲线如图10所示。图中,风向与水平面的夹角为-10°、-5°、0°、5°、10°,共5种工况。
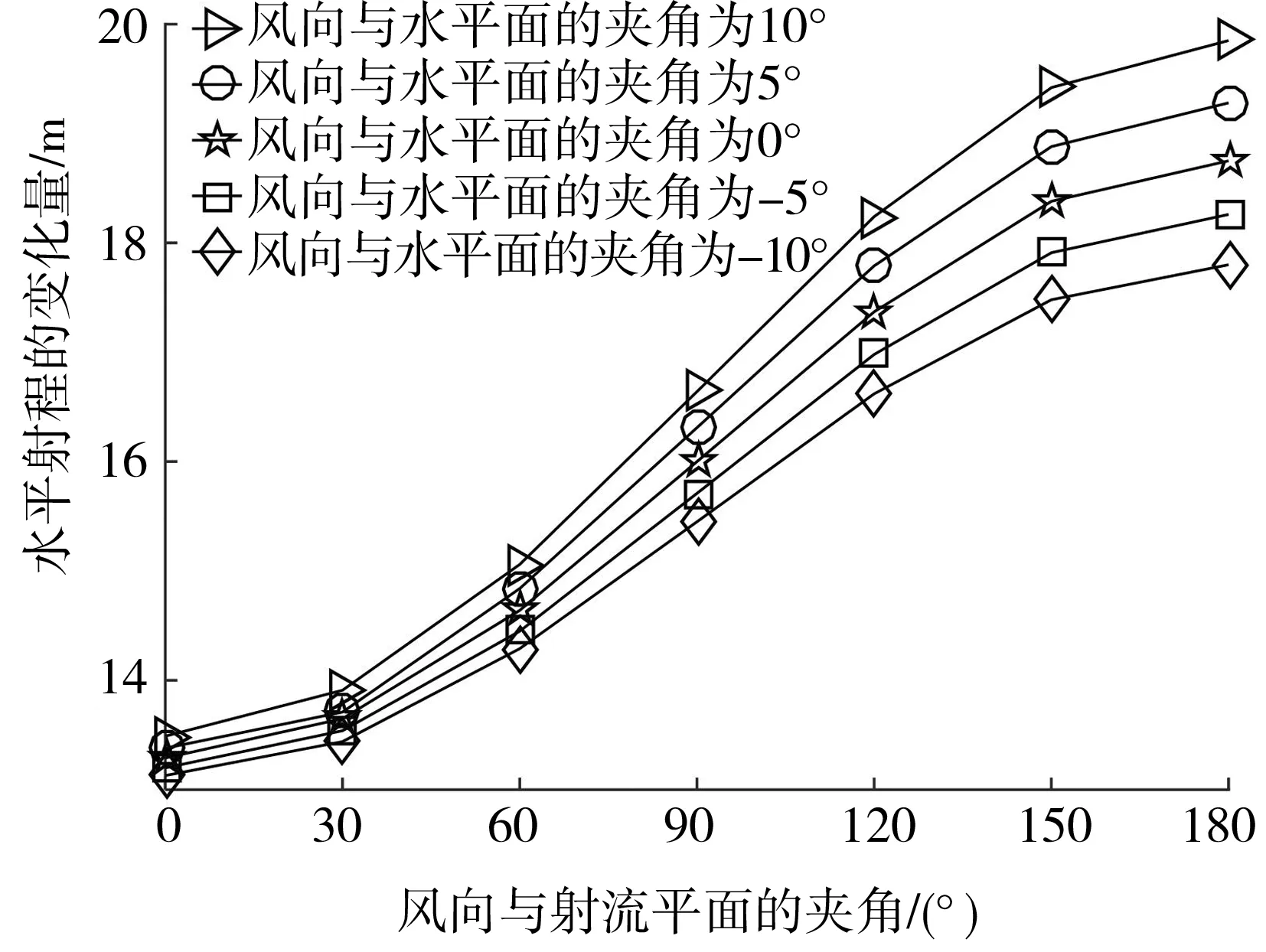
(a) 水平射程的变化
从图10(a)可以看出,当风速一定且风向与射流平面的夹角不变时,水平射程的变化量随着风向与水平面夹角的增大而增大。从图10(b)可以看出,风向与射流平面的夹角不变时,射流水体的横向漂移随着风向与水平面夹角的增大而增大。
5 结束语
本文针对隧道内复杂的火情设计了悬挂式轨道灭火机器人的机械结构,通过喷头水平方向和垂直方向的双重定位,实现了火源的精准定位;在建立射流轨迹微分方程后,分析了不同工况因素对射流轨迹的影响。仿真结果表明:增大俯仰角和工作压力可以增加水流射程;水平射程的变化量随着风向与水平面夹角的增大而增大,顺风或逆风对射程有明显的影响,且风速越大影响越显著。研究结果能为后续的火源定位研究提供参考。
