豆粉喷雾干燥塔遗传模糊PID串级控制系统仿真
2022-02-13田思庆潘佳琦
田思庆 潘佳琦 李 丽 侯 强 徐 颖
(1. 佳木斯大学信息电子技术学院, 黑龙江 佳木斯 154005;2. 佳木斯大学科技处,黑龙江 佳木斯 154005;3. 沈阳工业大学机械工程学院,辽宁 沈阳 110000)
目前,中国中小型企业的喷雾干燥设备与控制系统相对落后,未采用先进的控制算法和适应生产的控制方案,导致系统控制响应延迟、运行不稳定、经常出现焦粉现象,影响冲调产品的品质和口感[1]。喷雾干燥工艺中,传统的系统一般采用单回路PID控制。苏和等[2]利用数字PID算法对喷雾干燥系统进行了控制,但缺乏对控制对象特性变化的适应能力。颜文旭等[3]提出了基于模糊逻辑控制的喷雾干燥控制方法,有效解决了滞后带来的控制振荡现象;任小洪等[4]采用西门子PLC中自校正模糊控制模块建立了一套喷雾干燥塔计算机控制系统。但是喷雾干燥是一个多参数温度控制过程,上述模糊控制方法使用简单的单回路控制,不同回路间的参数相互独立,针对干扰和非线性特性无法满足控制要求。
遗传算法是一种先进的优化算法,被广泛应用于电气工程[5-6]、计算机[7-8]、医疗[9-11]、网络工程[12]、农业工程[13-15]等领域。为使系统能够快速响应输入变化,减小系统超调量,文章拟设计以进风温度为副被控量,出口温度为主被控量,蒸汽进气量调节阀的开度为控制量构成一个串级调节系统。同时为确保系统能够拥有良好的动静态性能,在串级控制方案中,主控制器采用遗传模糊PID控制器,选用模糊算法修正PID控制参数,并利用遗传算法的全局优化和并行能力在线优化模糊PID控制器的量化因子和比例因子;副控制器采用PI控制器[16],旨在精准控制蒸汽阀开度。
1 豆粉喷雾干燥塔系统
1.1 干燥塔系统工艺流程
喷雾干燥作为整个豆粉生产工艺最重要的环节,浓缩蒸发后的豆粉料浆在高压泵的作用下与经过空气加热器的纯净空气于干燥塔内瞬间完成热交换并干燥成豆粉,干燥后豆粉自由降落至粉塔锥底,进入流化床进行二次干燥及冷却;热交换蒸发后的含残粉的热空气在粉塔顶部经排风口进入旋风分离器进行分离,残粉沿内壁下落至输粉阀,罗茨风机将其吹入干燥塔内进行二次重聚。
1.2 干燥塔系统控制方案
通过对工艺流程分析可知,干燥塔的进、排风温度对豆粉的含水量和集粉率影响较大。在排风温度控制中,一般是在稳定进风温度的前提下根据给料量决定干燥塔的排风温度,但是高压泵压力调节在短时间内不稳定,容易造成豆粉粘壁,同时控制管道较长,有很大的滞后和惯性。在进风温度控制中,一般通过调节蒸汽量来控制进风口温度,进风温度具有较大调节范围,且控制管道较短,具有较小滞后和惯性,但存在热空气流量和进料速率的扰动,使其控制不精确[17]。
上述控制方案为单回路控制,豆粉喷雾干燥塔控制管道较长,具有惯性、大滞后以及各因素间强耦合等特性,会出现控制不协调、超调量大等现象,本设计采用以进风温度为副被控量,出口温度为主被控量,蒸汽进气量调节阀的开度为控制量构成一个串级调节系统[18],其控制原理如图1所示[19]。
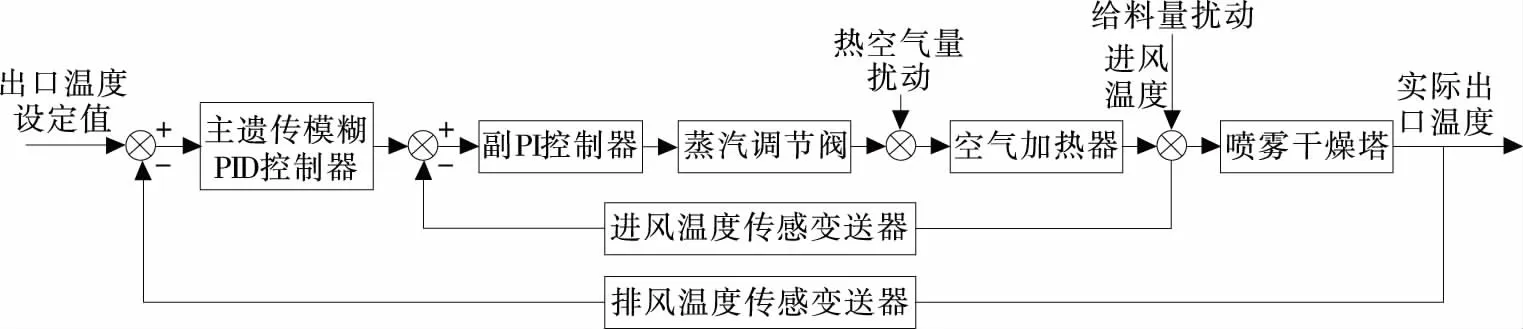
图1 豆粉喷雾干燥串级控制系统示意图
豆粉喷雾干燥塔串级控制流程图如图2所示,排风温度传感器的温度反馈值与主控制器的设定值进行比较,经过主控制器运算后,主控制器的输出作为副控制器的温度输入值;进风温度传感器的温度反馈值与副控制器的输入值进行比较,经过副控制器运算后,副控制器的阀度输出值直接作用于执行结构蒸汽调节阀,进而控制蒸汽调节阀的开度[20]。
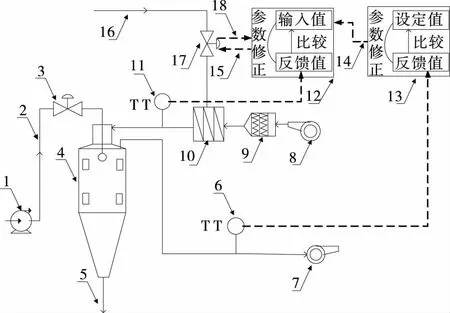
1. 高压泵 2. 豆粉料浆 3. 电动阀门 4. 喷雾干燥塔 5. 豆粉 6. 排风湿度传感器 7. 排风机 8. 进风机 9. 空气过滤器 10. 空气加热器 11. 进风湿度传感器 12. 副控制器 13. 主控制器 14. 输出控制值 15. 输出控制值 16. 饱和蒸汽 17. 蒸汽调节阀 18. 阀位反馈
2 干燥塔遗传模糊PID串级控制系统设计
干燥塔串级控制系统主控制器采用遗传模糊PID控制,副控制器采用PI控制。文中使用遗传算法优化主回路中模糊PID控制器中输入量e和ec的量化因子Ke、Kec以及3个比例因子Kup、Kui、Kud,并在遗传算法的选择、交叉和变异策略上进行改进,进而提高系统控制精度,遗传模糊PID控制器如图3所示。
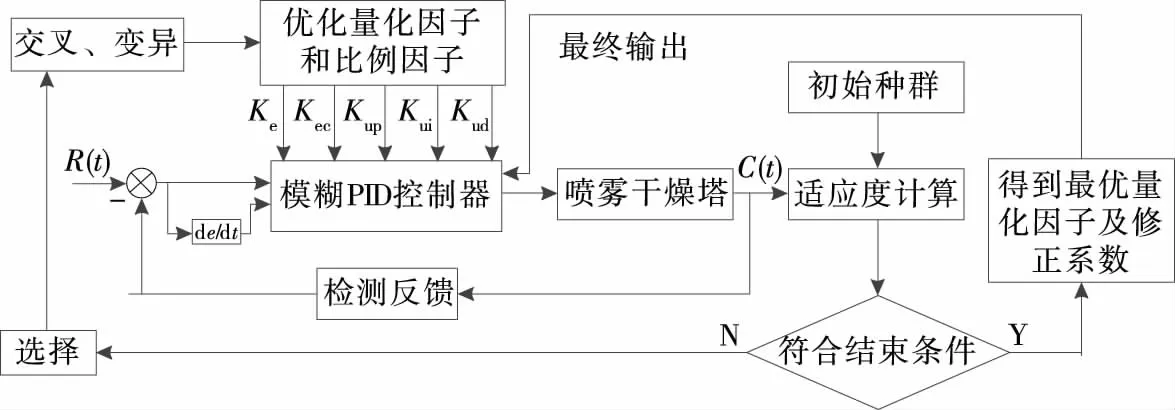
图3 遗传模糊PID控制器
2.1 变量个体的编码
为了提高算法运行效率和减少程序设计的复杂程度,选择二进制编码作为变量个体的编码方案。根据编码精度,用长度为6的无符号二进制符号串分别表示遗传模糊PID控制器中的5个决策变量,并根据决策变量Ke、Kec、Kup、Kui、Kud的排序形成30位组合代码串[21]。
drying tower
2.2 适应度函数
为了使最优个体充分体现解的空间特性,减少系统计算时间,选取系统响应时间tu、超调量σ和稳态误差ess来设计优化的目标函数:
(1)
式中:
e(t)——控制系统误差;
u(t)——系统控制器输出;
tu——系统响应时间[其中ey(t)=y(t)-y(t-1)],s;
y(t)——被控对象输出值;
w1,w2,w3,w4——各性能指标的权值。
各项指标的权值为w1=1.21,w2=0.89,w3=5.23,w4=3.34,w5=0.23。为了避免随机漫游现象,放大原始适应度值,以提高个体竞争力,并进行指数变换:
F*(t)=e-αF(t),
(2)
式中:
α——指数的系数,取α=2。
2.3 选择算子
传统轮盘赌算子是将个体的相对适应度作为该个体选择的概率,所以如果该个体的相对适应度高,那么其被选择的概率越大。为了避免种群多样性降低,在传统轮盘赌选择的基础上提出基于精英保留策略的轮盘赌选择方案,对当前种群最优个体进行精英保留,不参与再次选择、交叉及变异操作,当前种群中其余个体则参与遗传操作[22]。
2.4 交叉算子和变异算子的自适应调整
为了避免遗传算法搜索过程中破坏优良基因,提出基于加权海明距离的交叉率和变异率自适应调整策略,其调整式分别为:

(3)
(4)
式中:
Hbest——变异的个体与最优个体间的加权海明距离;
Pc1、Pc2——最大和最小交叉概率;
Pm1、Pm2——最大和最小变异概率;
f′——进行交叉和变异操作的两个个体间较大的适应度;
favg——当前种群平均适应度值;
fmax——当前种群最大适应度值;
a——最大加权海明距离;
K——调节交叉率、变异率的权值。
文中设置Pc1=0.3,Pc2=0.9,Pm1=0.1,Pm2=0.9,K=0.3。
3 干燥塔遗传模糊PID串级控制系统仿真
3.1 干燥塔系统控制模型
利用阶跃响应图解建模方法确定空气加热器和干燥塔的数学模型。用试验测得空气加热器和干燥塔在热空气流量阶跃扰动下的响应曲线如图4所示。由阶跃响应曲线可知,两个环节的数学模型可近似为一阶惯性和1个滞后环节串联而成。已知热空气阶跃幅值为
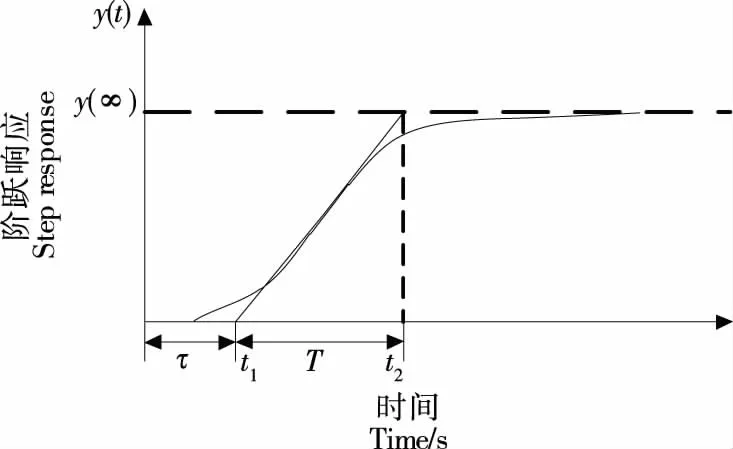
图4 阶跃响应试验曲线
x0=8t/h,
(5)
式中:
t——热动器质量,t;
h——时间,h。
空气预热器出口温度阶跃响应曲线上测得最终稳态值y(∞)=18 ℃,滞后时间τ=40s,一阶惯性环节时间常数T=762s;干燥塔出口温度y(∞)=64 ℃,滞后时间τ=75s,一阶惯性环节时间常数T=265s。根据响应曲线可得预热器的数学模型和干燥塔数学模型分别为:
(6)
(7)
式中:
s——拉普拉斯变换符号。
3.2 干燥塔串级控制系统分析
为了比较串级控制系统与单回路控制系统的性能特点,搭建单回路和串级控制系统Simulink模型结构(见图5)。其中串级系统主控制器采用PID控制器,副控制器采用PI控制器,单回路控制系统采用PID控制器。
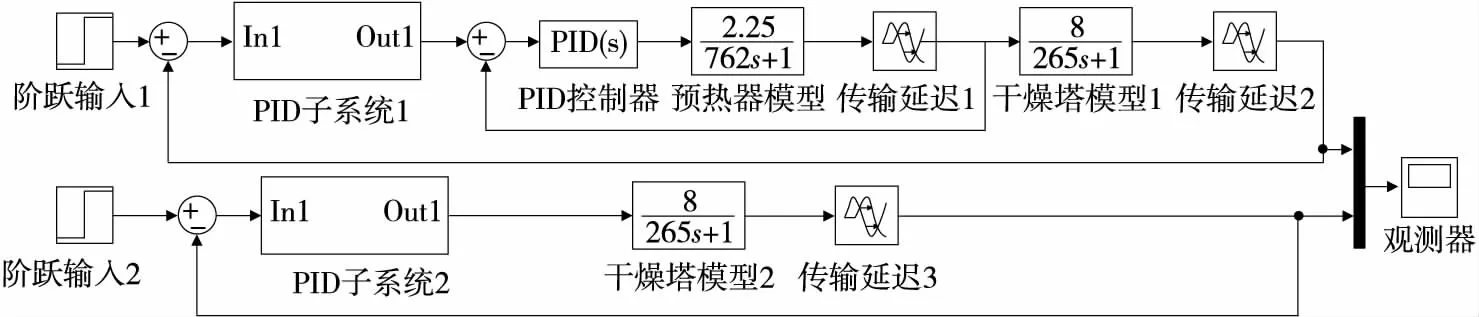
图5 串级控制和单回路控制系统Simulink模型结构
通过Z-N整定法计算串级系统和单回路控制器参数,并将调节器参数添加至Simulink仿真模型中,得到单回路与串级控制的单位阶跃响应曲线如图6所示。由图6可知,串级控制较单回路控制超调量小,调节时间快[23]。
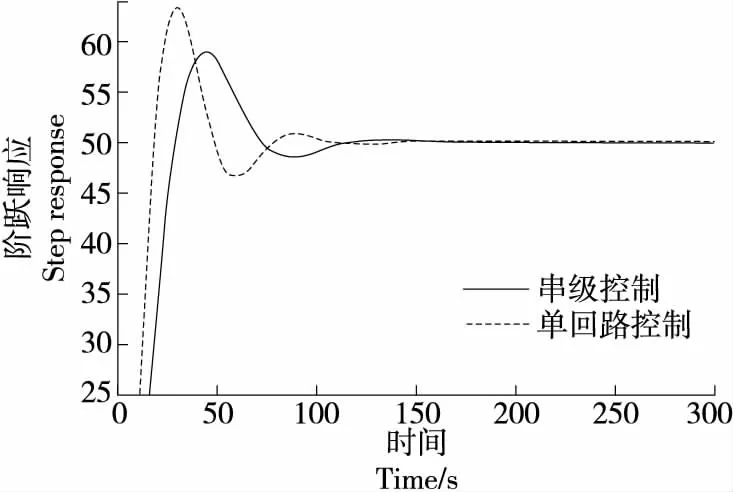
图6 单位阶跃响应控制图
为了比较串级控制系统和单回路控制系统的抗干扰性能,当两个系统分别运行400,600 s时,加入一个幅值为0.5、干扰时间为30 s的方波干扰,其Simulink仿真模型结构如图7所示,抗干扰仿真曲线如图8所示。

图7 加入干扰的Simulink仿真结构
由图8可知,当系统存在扰动时,串级控制系统比单回路控制系统的波动较小,且调节时间较短,抗干扰能力较强。

图8 串级控制与单回路控制抗干扰曲线
3.3 干燥塔遗传模糊PID控制器设计及仿真
干燥塔串级控制系统主控制器采用遗传模糊PID控制,副控制器采用PI控制。在主回路中,遗传算法程序调用串级控制系统Simulink仿真模型对遗传模糊PID控制器的量化因子和比例因子进行寻优,将优化后的参数传递给遗传模糊PID控制器,然后进行适应度值的计算,选取最大适应度值对应的最优参数进行系统控制;在副回路中,采用Z-N整定法将整定后的最优PID参数对系统实施控制,使系统性能达到最优[24]。
使用Matlab软件的遗传算法工具箱对变量进行寻优,由图9可知,种群开始进化时各个体间的平均距离较大,为了加快种群寻优进程,遗传算法最开始运行时使用较大的交叉率和较小的变异率;随着迭代过程的进行,种群个体间的平均距离较小,为了避免种群陷入局部最优,遗传算法运行对种群选用较小的交叉率和较大的变异率,增加种群多样性[25]。
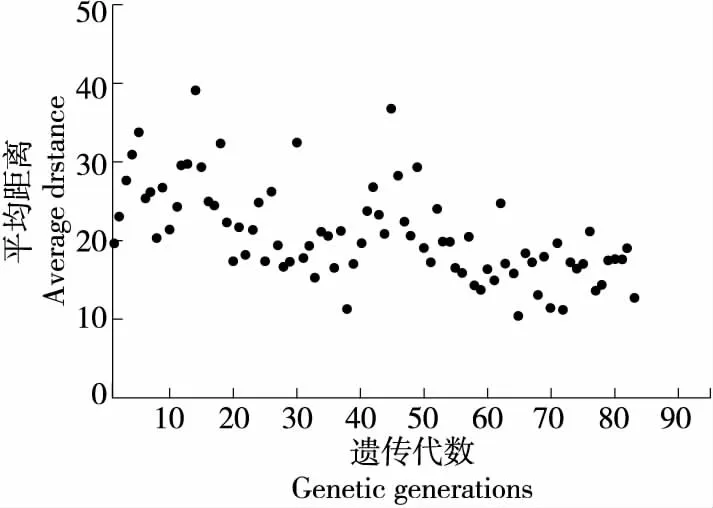
图9 不同遗传代数的种群平均距离
每一代种群适应度函数的最佳值和平均值如图10所示,由图10可知,早期各代中,当个体的适应度值离理想值较远时,最佳值会迅速得到改进。后期各代中,种群越接近最佳点,最佳值改进得越慢。
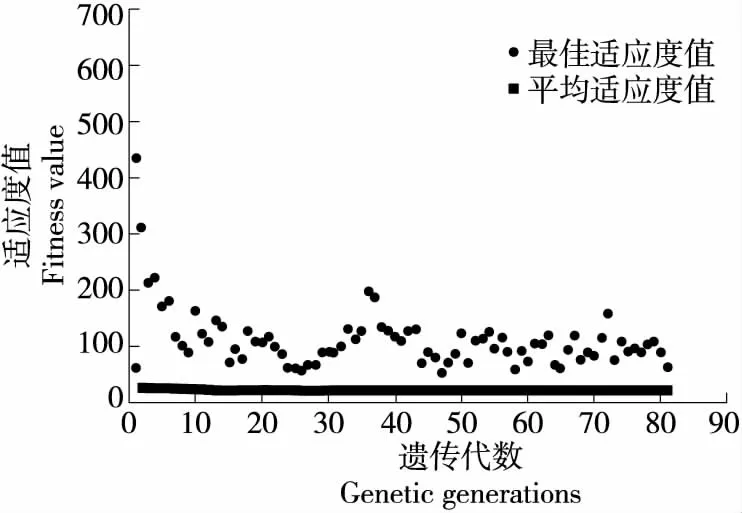
图10 每一代种群适应度函数的最佳值和平均值
种群经86代遗传寻优后,种群个体趋于多样化,优秀个体较多,第45个个体的适应度值最大,当前种群的最优个体为(Ke,Kec,Kup,Kui,Kud)=(0.650,0.245,0.368,0.250,0.455)。
采用遗传算法整定主回路模糊PID调节器参数为KP2=3、Ki2=0.45、Kd2=0.32,采用Z-N整定法整定的副回路PI调节器参数为KP1=2.16、Ki1=1.23。将主副回路的调节器参数添加至Simulink仿真模型中,串级控制系统副控制器不变,主控制器分别采用常规PID控制、模糊PID控制和遗传算法优化后的模糊PID控制,当施加阶跃信号时,目标温度为82 ℃时升温,如图11所示。
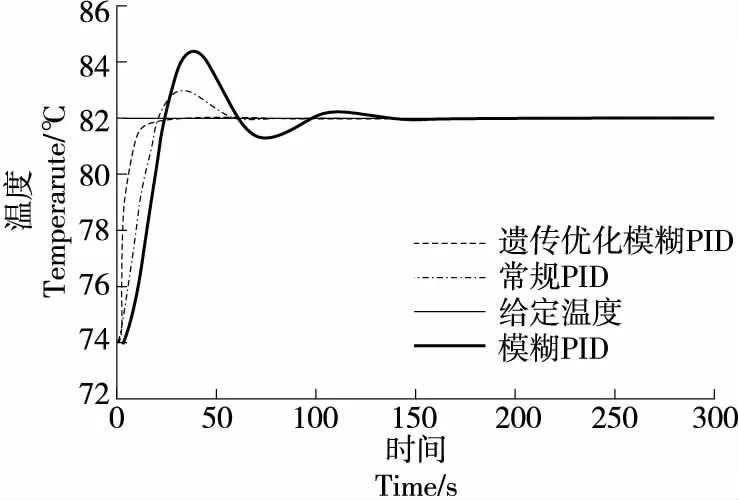
图11 目标温度为82 ℃时的升温控制曲线
3.4 干燥塔遗传模糊PID串级系统抗干扰与仿真
由于干燥塔系统的扰动主要来自于进风口热空气量供给的扰动,为了验证串级控制主回路中遗传模糊PID算法,模糊PID算法及PID算法的抗干扰能力,在仿真模型中500 s时分别加入一个幅值为0.5、干扰时间为10 s的方波干扰[26],3种控制算法的Simulink仿真结构如图12所示。启动仿真后得到3种控制算法的抗干扰仿真曲线如图13所示。

图12 3种控制算法加入干扰后的Simulink仿真结构
由图13可知,遗传优化后的模糊PID控制系统遇到干扰后超调量远小于另外两种控制系统,同时能够将温度很快地稳定到目标值,说明遗传算法优化模糊PID控制器可以改善系统的鲁棒性等控制性能。
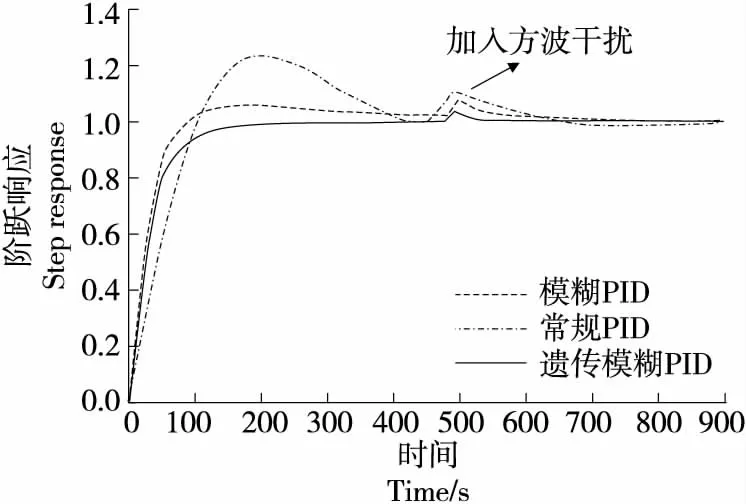
图13 加入方波干扰后的控制效果曲线图
4 结论
为了提高生产过程中自动化与智能化程度,使豆粉集粉率与含水量保持在理想范围内,文章以豆粉喷雾干燥为研究对象,分析并设计了一套低能耗、高产能且适用于生产现场的豆粉喷雾干燥塔控制系统。通过仿真验证和比较分析,串级控制比单回路控制具有较好的抗干扰性能,与模糊PID控制和常规PID控制相比,遗传模糊PID控制具有调节时间短、超调量小和鲁棒性强等特点,有效改善了豆粉喷雾干燥能耗高、低产能等生产实际问题。后续将考虑按图2建立实际的豆粉喷雾试验环境,如使用食品级304钢制作豆粉喷雾塔系统,模拟豆粉喷雾生产工艺流程,采用二线制RTD传感器采集温度信号,采用单片机作为控制器等。
