大棚作业绿叶菜收割机的研发与试制
2022-02-13袁正华
袁正华
(上海世达尔现代农机有限公司,上海市 200245)
0 引言
在大中城市,人民生活水平提高,饮食安全受到普遍重视,绿叶菜的播种、收获等环节受到关注。在绿叶菜的耕、种、收等环节中,耕、种环节基本实现机械化作业,绿叶菜机械化收割还没有得到普遍应用。
上海市农业农村委高度重视鸡毛菜、茼蒿、苋菜等绿叶菜收割,通过各种途径着力解决绿叶菜收割的瓶颈问题。为了解决绿叶菜收获的问题,本项目重点研究了上海地区绿叶菜的种植和收获习惯,研制出适应大棚作业的绿叶菜收割机。通过研究、试制、试验等工作,研制样机达到用户对绿叶菜的收割需求,使用本收割机能够提高劳动生产率、降低劳动强度、减少劳力成本等。
1 叶菜收割机基本构造设计
本机主要由手扶行走底盘、输送带机构、切割装置、拨禾轮装置、自动仿形装置、电器控制系统等部分组成。电控系统主要由绿色环保的锂电池作为动力源,由底盘驱动电机、输送带驱动电机、切割器驱动电机、仿形装置的电动推杆和角度传感器、处理器、线束及控制元件等组成。收割机基本构造图如图1所示。
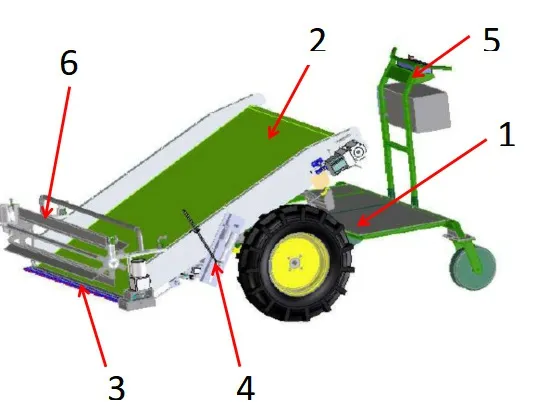
图1 收割机基本构造图
2 关键部件研制
2.1 手扶行走底盘研制
适应收割机作业要求,底盘需要在两侧垄沟中行走,根据上海蔬菜种植农艺决定垄沟高度和宽度,左右轮胎中心距与垄沟中心宽度要一致,底盘要有良好的移动通过性能,离地间隙要高于垄沟深度。其他机构和装置安装在底盘上,底盘需要有一定的承载能力。
手扶行走底盘由前侧两驱动轮、后侧两支撑轮组成,采用电机驱动差速器,驱动两侧驱动轮。底盘离地间隙,根据叶菜畦面垄沟深度和宽度进行设计,上海地区垄沟深度一般按15 cm、垄沟宽度平均按20 cm计算。
根据整机承载重量350 kg计算,驱动电机选用48V、1kW无刷电机带二级减速,再通过减速箱实现最高1 km/h作业速度,人工变档实现路上行走最高3 km/h。如图2所示行走底盘结构图。

图2 行走底盘结构图
2.2 输送带机构研制
为了运送收割后的叶菜顺利进入菜框,需要有专门输送机构。输送带必须采用环保食品级材料,才能确保收割后的蔬菜是安全可食用的。为了防止叶菜切割后滞留在割刀上方,导致被重复切割,需要在割刀上方配置拨禾轮装置,拨禾轮将割刀割下的叶菜及时地从割刀上拨运到输送带上。
考虑到以锂电池为动力源,是达不到液压驱动这种大扭矩效果,对有一定驱动扭矩要求的输送带进行设计,收割机输送带涨紧了才能工作,涨得越紧,输送带平面就越平整,越有利于工作,但作用在主动辊的驱动扭矩也越大,所需电机功率也越大。
为了减少功率对电池消耗,对输送部件结构形式进行研究和设计。
1)从动轴由滑动形式改为滚动结构,减少传动阻力。
2)在主、从动轴之间,输送带上层工作面下设计安装有托板,使得输送带运转时上平面平整,达到了作业要求。此时对主动轴的驱动扭矩最低达到20 N·M。输送带下层安装有托辊,防止输送带悬空,妨碍其他工作部件。采用这种传动形式后,即可使用小功率电机,输送带张紧以不打滑为基准。输送带机构示意图如图3所示。
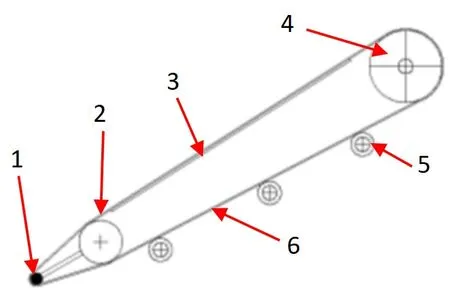
图3 输送带机构示意图
3)输送带电机采用48V、500W无刷电机。
2.3 切割装置研制
收割叶菜的切割装置至少有这么四种类型,例如单刀循环式、单刀往复式、双刀单动往复式、双刀双动往复式。每种类型的割刀,各有各的优缺点。
适应大棚内畦面以上叶菜收割作业,适应多种叶菜收割作业,割刀型式选用双刀双动往复式切割装置,上下两个刀片相对移动,移动速度相同,但移动方向相反。如图4所示双刀双动往复式切割装置。
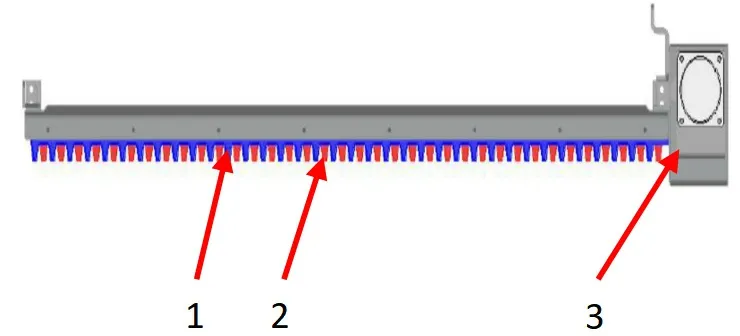
图4 双刀双动往复式切割装置
割刀驱动方式采用齿条、齿轮和偏心轮模式,这种结构能有效减少机器左右振动,驱动方式如图5所示。

图5 驱动方式示意图
叶菜收割作业时,割刀切割频率可以根据不同作业要求进行调整。为保证割刀的切刀性能,割刀运动时平均速度一般不能低于0.6 m/s,否则会出现将作物撕裂、扯断、拨出及割刀堵塞等现象。
2.4 割台前后、左右仿形装置研制
在收割叶菜时,需要控制割茬在一定范围内,留茬太高造成收割损失,留茬太低割刀容易接触泥土,造成泥土进入收割的叶菜里。地面仿形装置,也就是割台根据地面起伏情况,自动及时升降,确保割茬高度一致。
割台仿形检测机构通过伸缩装置达到调节割刀离地间隙调节的目的,其应至少包含传感器、左右联动装置、地面探测装置、伸缩装置。
割台仿形装置主要有左右升降电动推杆、探测器升降电动推杆、左右探测装置(包括角度放大器)等组成,仿形装置示意图如图6所示。通过安装在输送带装置的电动推杆2、3和杆端轴承1的三点,固定在行走底盘上。杆端轴承1固定,电动推杆2、3通过电控装置实现输送带装置整体升降或左右单独升降。探测器升降电动推杆控制探测器的高低,根据农艺要求,调节割刀的离地高度,也就是设定割茬高度。
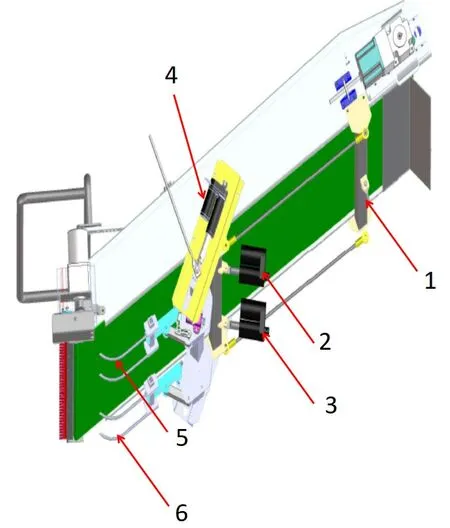
图6 仿形装置示意图
探测器示意图如图7所示,仿形装置通过仿形探针的变化来获取地面的高低信息。仿形探针检测到高低变化,通过角度传感器将信号传送到处理器,处理器再发出信号给电动推杆,从而控制电动推杆升降,实现自动调节高度。
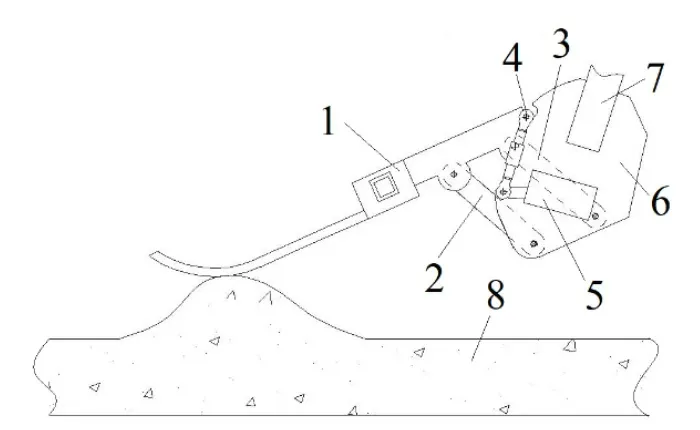
图7 探测器示意图
2.5 电器控制系统开发
电器控制系统包括驱动电控系统和仿形电控系统,主要有锂电池、底盘驱动电机、输送带驱动电机、切割器驱动电机、仿形装置电动推杆和角度传感器、处理器、线束及控制元件等组成。通过软件逻辑编程,界定各操作手柄的动作顺序,进行互锁、避免干涉。
仿形电控系统采用两套控制模式:手动控制模式和自动仿形模式。
1)手动控制模式:可操作左、右推杆开关控制左、右推杆前进后退;可操作双推杆开关同时控制左、右推杆动作,若双推杆与左、右推杆开关冲突,以双推杆为准;可操作侧推杆开关控制侧推杆位置,并在面板显示该位置。
2)自动仿形模式:如图8所示,左、右角度传感器超过范围后,根据10秒内累加角度,自动调整左右推杆动作,并确保推杆不频繁抖动。左右推杆各自独立反馈及控制。

图8 电控系统示意图
3 田间作业试验
试验地点在上海市农业科学院庄行综合试验站,试验场地为8 m连栋大棚,每栋5垄畦面、畦面宽1 200 mm,垄沟深150 mm,两垄沟中心距1 600 mm。作物对象鸡毛菜,叶菜高度100~120 mm,设定割茬高度20 mm。
根据收割机作业情况,对各项目进行数据检测、汇总、对比,各项指标值如表1所示。

表1 各项指标值
对比检测结果,本机各项检测值均已经达到性能设计要求。割幅、割茬高度、净菜率等指标满足用户需求。耳位噪声、工作噪声符合作业环境安全环保要求。
4 结论与设计改进
通过绿叶菜收割机研制和试验,并经过大量的调查研究,得出如下结论:
1)本收割机结构设计合理,采用锂电池作为动力源,符合绿色环保要求。
2)本收割机采用自动仿行机构和电控系统设定割茬高度,使割茬高度稳定,提高作业净菜率,同时降低工人操作强度。
3)本收割机采用双动刀切割装置,切割性能良好、作业效率高,适合多种叶菜的切割、收集。
本收割机通过试验,也发现有待改进完善之处,进一步满足适应用户收割叶菜需要。具体改进设想如下:
1)依托现有收割机驱动平台、输送带装置和仿行装置等,设计新的切割装置,通过更换切割装置,实现对畦面以下叶菜根部进行切割,割茬控制在0~15 mm之间。
2)增加对行线无人驾驶控制功能。对行线无人驾驶控制系统主要包括垄沟探测系统、转向系统、行线环境适应系统、无线遥控系统。通过机电一体化配合,让设备在无人驾驶状态下依旧能够安全稳定运行,保证作业安全、提高作业效率。
