基于权重不可知神经网络的旋翼无人机检测*
2022-02-12谢跃雷梁文斌
谢跃雷,刘 信,梁文斌
(1.桂林电子科技大学 a.信息与通信学院;b.信息科技学院,广西 桂林 541004;2.广西无线宽带通信与信号处理重点实验室,广西 桂林 541004)
0 引 言
随着低空空域的逐渐开放,无人机产业取得了前所未有的发展。根据中国产业研究院相关报告分析,截止2019年初,无人机行业产值达101.5亿美元,在2020年增加到209.1亿美元。然而,无人机数量的不断上升却带来了一系列安全威胁,并且无人机行业管理也并不完善,从而导致“黑飞”“滥飞”事故频发。如今,国内外针对无人机的检测、跟踪、反制等技术研究已展开[1]。
随着计算机处理数据能力的提升以及人工智能领域的快速发展,大量学者和研究机构开始将神经网络应用到目标检测中[2-3]。神经网络凭借强大的学习能力和特征提取能力,在检测速度和精度上拥有卓越性能。文献[4]提出了一种基于Gabor深度学习的无人机检测方法,主要通过利用Gabor滤波器来优化神经网络的卷积核,从而提升网络提取特征的鲁棒性。文献[5]使用深度学习网络对回波信号中的目标RCS序列进行学习,进而提取其中的无人机特征,最终识别准确率达87%,同时还能有效区分飞鸟目标。物体及物体的任何部件微动会产生的微多普勒信号,包含了物体独特的特征信息[6]。文献[7]将卷积神经网络与长短期记忆网络相结合,以实现对弹道锥体目标的微动特征分类。新的神经网络在信噪比为-5 dB时的检测准确率达90%以上。文献[8]将卷积神经网络用于海上微动目标检测,在信噪比不低于-20 dB时的检测概率大于90%,并且检测性能优于传统支持向量机(Support Vector Machine,SVM)分类方法。以上研究为无人机的探测和识别提供了新的解决方法和研究方向[9-10]。
受自然界“早熟行为”的启发,谷歌大脑团队提出了一种权重不可知神经网络(Weight Agnostic Neural Network,WANN),它的主要目标是对某项任务进行神经网络结构搜索,在训练过程中弱化权值的重要性,最终找到一个在给定任务中表现良好的最小架构[11]。他们认为寻找对权值不敏感的神经网络,这种结构能够具有很强的归纳偏置,即使用随机权值也能很好完成给定任务。谷歌团队也将WANN神经网络用于手写字数据集MNIST识别,识别率高达94.2%,其性能堪比具备数千个连接的单层神经网络。
本文使用WANN模型对回波信号的循环谱等高图进行训练学习,通过检测其中的无人机微动特征来实现无人机在不同飞行状态下的探测。在仿真实验中,分析了不同权重值对检测概率的影响以及该方法的抗噪性能,并通过实测数据验证了该方法的有效性。
1 旋翼无人机的微动模型
微动特征属于运动目标的精细特征。大多数小型无人机都有一个及以上数目的旋翼,旋翼的转动会对电磁波信号产生微动调制,利用该特征进行目标检测具有独特的优势。
图1所示为雷达与转动旋翼的几何关系图。图1(a)中,雷达O点到旋转中心的俯仰角为β,并且发射信号频率为f0,波长为λ。
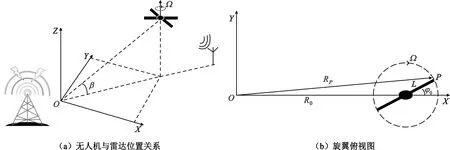
图1 无人机与雷达的几何关系
在电磁散射理论中,旋翼的每个叶片都是由无数个散射中心组成的。由图1(b)可知,旋翼平行XOY面以转动频率Ω进行旋转,它的旋转中心到雷达的距离为R0,并假设旋翼上的叶片长度为L,初始相位为φ0,并有某一散射点P。散射点P到外辐射源雷达O点的距离为RP,到旋转中心的距离为lP,则可以得到该散射点的回波信号为
sR(t)=exp{-j[2πf0t+Φp(t)]} 。
(1)
式中:Φp(t)是回波信号的相位函数,表达式为
(2)
将式(2)代入到式(1)中,可以得到新的散射点回波信号为
(3)
所以由式(3)得到散射点返回的基带信号为
(4)
通过对式(4)做关于叶片长度L的积分,从而得到单个叶片上总的微多普勒回波信号为

(5)
假设旋翼无人机每个旋翼包含两个叶片,并且两个叶片的旋转角相差π,则无人机单个旋翼的回波信号为


(6)
多旋翼无人机一般含有M个旋翼,其回波信号由数个单旋翼回波信号叠加而成,因此总的回波信号为

(7)
式中:Ωm为第m个旋翼的转动频率,φm表示第m个旋翼叶片转动的初始相位,m=0,1,2,…,M-1。
2 权重不可知神经网络
2.1 NEAT遗传算法
本文采用权重不可知神经网络进行无人机检测。WANN作为一种网络结构搜索算法,受到了成熟的神经进化算法NEAT的启发。NEAT算法是拓扑扩张的神经演化(Neuro Evolution of Augmenting Topologies,NEAT)的简称。它与其他神经网络不同之处在于,训练之前,网络结构和权重值都不是固定的,并且初始网络结构只由输入层和输出层以及简单的连接构成。训练的过程中,通过改变网络的连接权重和网络结构开始逐渐复杂化,最后进化完成的网络不是分层的,且不一定为全连接,节点的连接自由度很大[12]。NEAT算法会有意识地将网络的尺寸控制到最小,从而获得最小的最优网络[13]。
2.2 构建WANN模型
WANN受NEAT算法的启发,在其基础上进行了衍变,采用忽略权值优化、只改变网络结构的方式进行搜索。谷歌团队在构建WANN模型时,也遵循NEAT搜索框架的原则,过程如图2所示[11]。

图2 构建WANN模型
具体步骤如下:
Step1 创建初始网络种群。初始网络是由输入输出层构成,它们之间没有隐藏节点,只有一小部分输入和输出之间有直接连接。
Step2 对每个初始网络进行评价。评价分为两部分,性能测试分数和结构复杂度。
Step3 通过改变评价分数排名靠前的网络的结构来创建新的网络种群。
接下来,算法从Step 2开始重复,生成复杂度递增的网络种群,并且性能优于之前的几代。
文献[8]还对网络搜索过程中的评价、变换和优化过程进行了详细解释。
(1)网络结构的评价过程
在评价过程中,首先给予网络多个单一共享权重值,然后输入数据样本,并计算出预测结果,最后取所有结果的均值作为性能测试的分数。其中给多个单一共享权重值进行测试是降低网络对权重值的敏感度。
预测结果是根据交叉熵损失的负值得到的。假设给定任务下测试结果为y1,y2,…,yn,那么经过Softmax回归处理之后的输出为
(8)

(9)
Softmax分类器常采用交叉熵为损失函数,其中a代表分类目标的真实值,y代表Softmax求出来的概率值。
然而,不仅网络结构的性能很重要,它的复杂性也很重要,而体系结构的复杂性是通过连接的数量来衡量的。如果多个模型的性能大致相同,那么更小、更短的网络结构总是比更复杂的网络结构更好[14]。
(2)结构变换
如图3所示,通过使用插入节点(insert node)、添加连接(add connection)、改变激活(change activation)这三个算子中的其中一个修改已有网络,从而创建新网络。其中新节点的激活函数是随机分配的,可能的激活函数有linear、step、sin、cosine、Gaussian、tanh、sigmoid、absolute value、invert(即negative linear)、ReLU。

图3 网络结构变换方式
(3)优化权重参数
在WANN模型训练完成后,还可通过反向传播来优化网络中每个权重值,以便输出值更接近目标输出。这里采用强化学习中策略梯度法(Policy Gradients)来优化权重,进一步提高网络性能。大体来说,就是先找到一个评价指标J(θ)(比如期望回报),θ是关于策略的参数,然后使用随机梯度上升法(θt+1=θt+αJ(θt))来更新策略参数,从而不断地最大化评价指标。
3 基于WANN的旋翼无人机检测
目前,基于神经网络的检测算法在检测精度和速度上拥有优越的性能,并且对不同数据集有较好的适应能力,因此在“低小慢”目标检测中开始得到应用。本文方法是文献[15]研究内容的延伸,将神经网络与循环谱等高图结合起来,利用循环谱的抗噪性以及其等高图良好的稀疏特性,进一步提升神经网络的检测性能。以下仿真实验主要探究上述方法在低信噪比下以及无人机运动状态下的检测性能。
3.1 检测流程
检测过程主要基于外辐射源雷达目标检测方法。外辐射源雷达自身不向外辐射能量,凭借第三方发射的电磁波信号来探测目标,如图4所示。无人机旋翼转动会对电磁波产生微动调制,因此通过采集无人机目标回波信号并检测其中的微动特征,进而实现无人机的检测。循环谱等高图可以理解为同一平面下表示能量分布的二维图,不同调制信号的等高图是不同。

图4 外辐射源雷达信号传播模型
本文检测方法的流程主要由数据集构建、WANN模型训练、旋翼无人机检测三部分组成,如图5所示。首先获得无人机目标回波信号,并计算其循环谱,同时转换为二维循环谱等高图;然后,将灰度化后的等高图作为训练集和测试集;接着,设置WANN训练的超参数,包括种群大小、训练代数以及评价后发生结构改变的种群个数;最后,用训练集训练生成相应的WANN模型,并使用测试集对模型进行测试,得到无人机的检测概率。为了进一步提升WANN模型的检测性能,还可以对该模型进行权重参数优化。
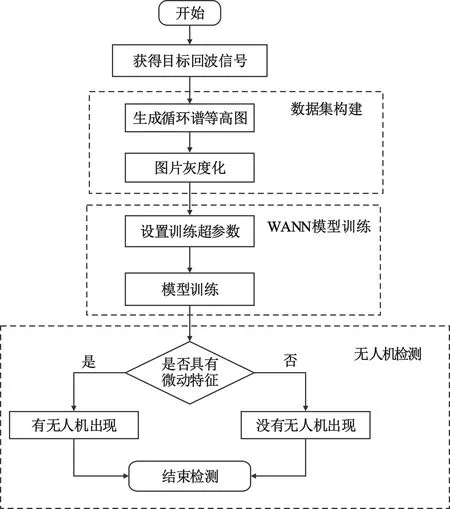
图5 检测流程
3.2 数据集构建
虽然文献[12]研究利用旋翼微动可以检测出无人机,但主要是在无人机悬停状态下,实际上随着无人机飞行状态的变化,它的旋翼转速也会发生相应变化,从而使微动特征不具有固定的调制周期特性。
旋翼无人机通过各个旋翼的不同转动状态来控制整个机身的飞行状态[16]。各旋翼的转动在保持相互独立的同时,又维持一种较强的耦合动态特性,任何一个旋翼的转速发生改变,都会影响其他自由度方向上的运动状态[17]。图6为四旋翼无人机不同飞行状态下各个旋翼的转动示意图。图6中箭头表示旋翼转动方向,线条粗细表示转速快慢,越粗则表示速度越快。一般情况下,四个旋翼的初始相位不同。

图6 不同飞行状态下的旋翼旋转示意图
本文仿真实验采用数字电视地面广播(Digital Terrestrial Multimedia Broadcast,DTMB)信号作为外辐射源信号,信号参数如表1所示。旋翼无人机参数如表2所示。

表1 DTMB信号参数

表2 旋翼无人机参数
根据旋翼无人机的微动模型,设置仿真中各旋翼转速如表3所示,固定初始相位φ为0°、30°、60°和50°。
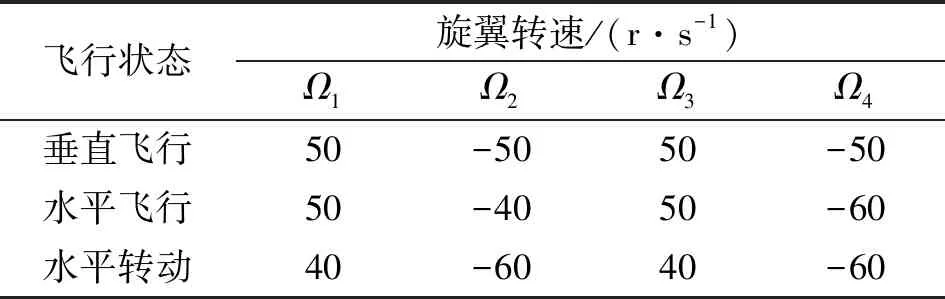
表3 三种飞行状态下的旋翼转速
按照表1所示参数,首先生成外辐射源DTMB信号,然后根据表2和表3参数生成旋翼无人机微动调制后的回波信号,最后获得回波信号的循环谱等高图,图7为部分数据集中的循环谱等高图,可以观察到有无人机时的等高图与没有无人机时的等高图在能量分布和形状上存在一定的差异。将等高图进行预处理后得到数据集,数据集分为训练集和测试集。训练集包括8种不同信噪比情况下共4 800张图片,每种信噪比情况600张,其中500张构成训练集,100张构成测试集。

图7 部分数据集示例
3.3 训练结果及分析
本文使用Python3.5的环境架构,计算机的CPU为AMD RYZEN r7 5800x,具有8核处理器以及16线程;显卡为NVIDIA RTX3070,内存32 GB。
WANN模型训练时的相关参数如表4所示。其中,输入大小指的是灰度图尺寸大小,即28×28=784;输出大小为有无人机出现和没有无人机出现的这两种结果;精英种群数表示排名前24的网络结构发生改变;电脑工作核数是根据电脑自身硬件情况而选择的,使用核数越多,占用的运算资源也就越多。除此以外,训练结果每隔8代保存一次。

表4 训练的超参数
表5为WANN模型设置不同权重值时的检测概率,仿真信噪比为-10 dB。实验结果表明并没有哪个权值显得比其他值更优秀,从而说明WANN训练过程中能有效降低网络结构对权重值的敏感度。

表5 不同权重值下的检测概率
考虑到实际应用中的复杂电磁环境,有必要研究不同信噪比下的检测概率。由图9可知,在信噪比等于-10 dB时,旋翼无人机的检测概率也有90%以上。这是因为循环谱有很好的噪声抑制能力,高斯白噪声在非零循环频率处不具有任何特征,并且循环谱包含幅度和相位信息,有利于WANN模型提取微动特征。
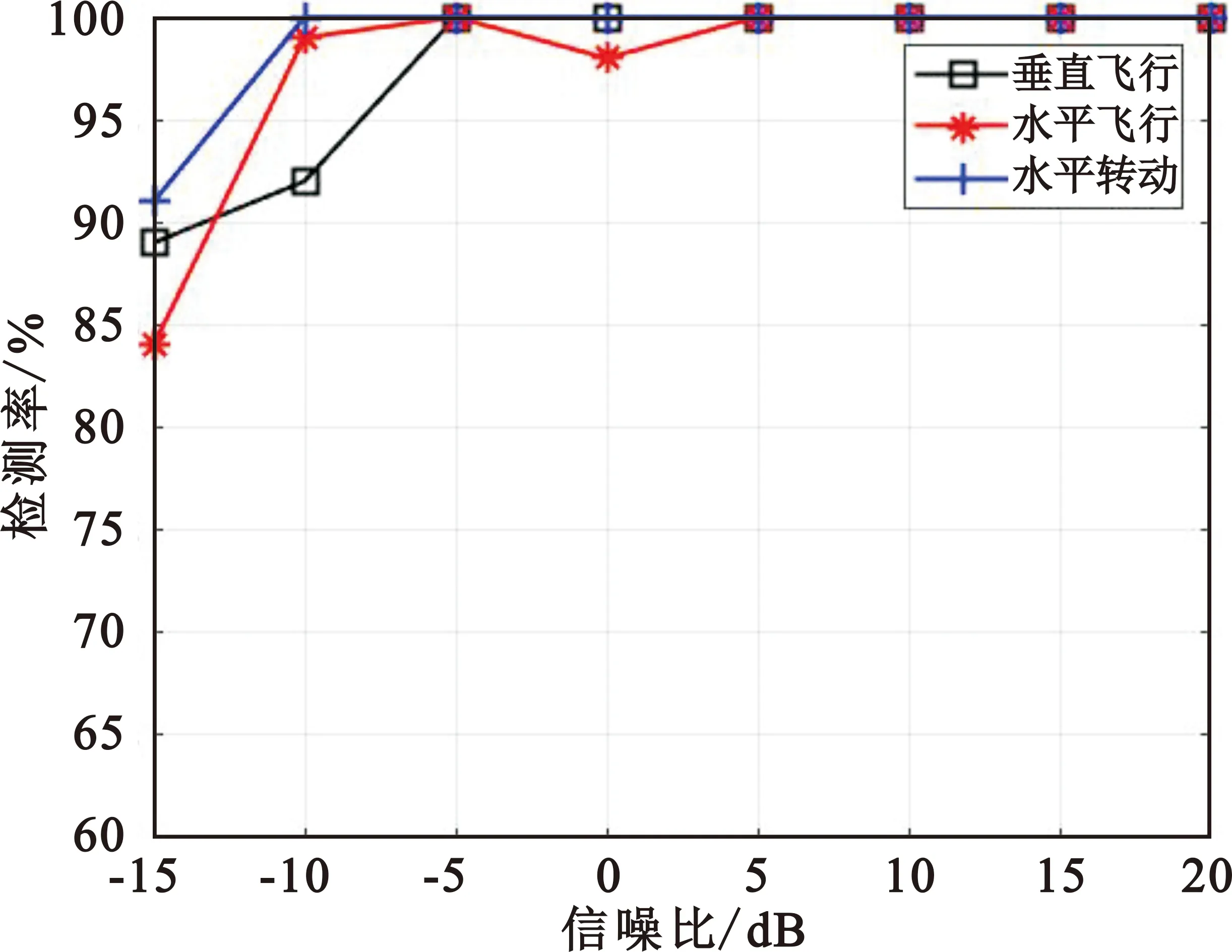
图8 不同信噪比下的检测概率
4 实测验证
4.1 实测方案与配置
实验接收点位于桂林电子科技大学图书馆五楼,接收装置为软件无线电USRP-2954,设置的I/Q采样率是40 Msample/s,ADC分辨率为14 b。射频接收通道的实时带宽为40 MHz,通道的中心频率为604 MHz。接收天线的频率范围是470~860 MHz,增益为20 dBi。外辐射源信号为尧山电视塔发射的DTMB信号,参数如表1所示,该信号属于V频段,频道为DS-26,频带范围为614~622 MHz,中心频率618 MHz。旋翼无人机位于接收装置前方,并分别进行垂直飞行、水平飞行以及水平转动。首先,设置USRP平台的参数,并利用DTMB天线接收外辐射源信号;然后,接收信号通过模拟下变频得到基带的I、Q分量,再经过高速ADC转换为数字信号;接着,通过数字下变频后得到基带信号;最后,将基带信号经千兆网口传入PC机进行存储和处理。在采集过程中,除了无人机回波信号外,还会引入电视塔直达波信号、周围障碍物反射回来的多径信号以及噪声干扰。其中,高斯白噪声不具有循环平稳特性,即在非零循环频率处的循环谱上没有值。直达波信号与多径信号的循环平稳性与目标回波信号不同,可以在循环谱上区分。
4.2 CNN网络
卷积神经网络在图像识别、视频分析和语音处理等领域表现突出,因此被广泛使用[18]。顾名思义,卷积神经网络主要运用了卷积运算处理数据,因此适用于处理具有规律性空间结构的数据,在图像识别中的效果优于其他神经网络结构。与卷积神经网络进行比较,有利于检验WANN在图像识别方面的能力。
实验采用的卷积神经网络共有两层,网络结构如表6所示。实验中,两种深度学习网络采用的数据集一致,输入数据集都为分辨率28×28的灰度图。卷积神经网络设置初始学习率为0.01,每次迭代使用50个样本。网络模型训练20次的结果的均值作为最终检测概率。
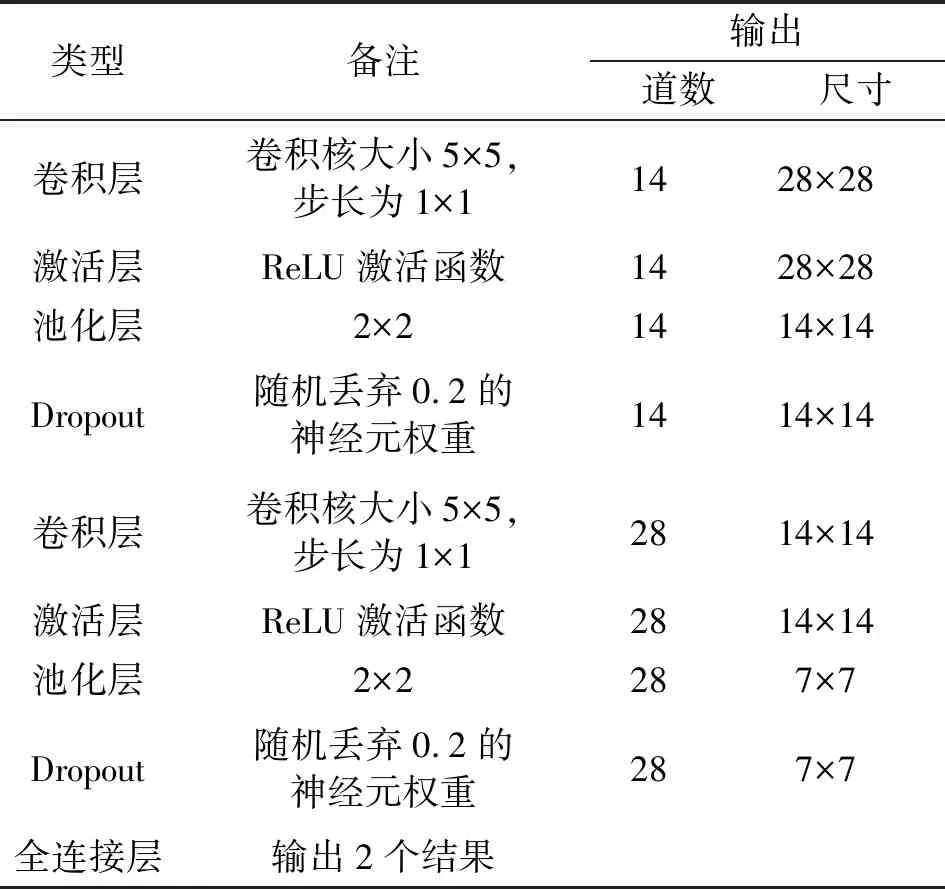
表6 CNN模型参数
4.3 实测结果及对比
表7为权重优化过程中设置的参数。CMA-ES称为协方差矩阵自适应进化策略,是一种策略搜索算法,模仿生物进化原理,主要进行变异和选择操作来实现寻优[19]。新生个体是父代随机变异产生的,并在实验后得到对应的适应度,然后根据大小从新生个体中选择出新一代种群,最后经过多次迭代获得性能更加优秀的种群个体。该方法还假设不论基因发生何种变化,产生的结果总遵循零均值及某一标准差的高斯分布。

表7 权重优化中的设置参数
在训练集个数为1 400、验证集个数为200的条件下,不同网络模型的实测结果如表8所示。由表8可知,与卷积神经网络模型相比,WANN模型在旋翼无人机进行水平转动时有更高的检测概率,其他两种飞行状态的检测概率也相差较小;在优化WANN模型的权重参数后,检测概率有明显提升。由此可见,WANN模型同样具有较好的图像识别能力。

表8 实测结果对比
5 结束语
本文提出了一种基于权重不可知神经网络与循环谱等高图相结合的无人机检测方法。在这一方法中,根据目标任务构建了具有良好特征提取能力的WANN模型,且该模型不需要进行权重值训练,同时利用循环谱抑制噪声的能力,实现了各飞行状态下的旋翼无人机检测。
由于本文所构建的数据集有限,所提方法的可靠性还需要深入研究。下一步将研究WANN模型用于多种型号无人机识别的问题。
