基于脉冲神经网络的雷达辐射源调制类型识别*
2022-02-12朱卫纲朱霸坤
李 伟,朱卫纲,朱霸坤
(航天工程大学 a.研究生院;b.电子与光学工程系,北京 101416)
0 引 言
雷达辐射源识别是情报侦察、获取敌情的重要手段,准确的雷达辐射源识别是掌握战争主动权的关键。传统雷达辐射源主要通过人工提取脉冲描述字参数构成特征向量进行识别,如模板匹配法、专家系统等。随着雷达的自适应技术和频率捷变能力的提高,现代雷达信号特征日益复杂,传统的雷达辐射源调制类型识别技术已经不能适应现代雷达辐射源调制类型识别领域。
近年来,机器学习因其自适应的特征提取能力以及良好的泛化能力,在雷达辐射源调制类型识别领域的应用研究越来越多。文献[1]提出使用层级自动编码器进行辐射源识别,文献[2]和文献[3]分别提出使用卷积神经网络(Convolutional Neural Networks,CNN)和改进的卷积神经网络进行辐射源识别,但目前绝大多数神经网络都存在运算量和功耗大的缺点。为此,本文提出使用事件驱动的脉冲神经网络来识别雷达辐射源。通过与传统神经网络对比,本文方法具有优良的检测精度,能够满足低功耗的要求。
1 雷达辐射源特征提取
在传统的雷达数据处理中,只用了时域或者频域的单一特征,而时频二维特征图可以同时从时域和频率两方面来表示信号[4]。时频变换是通过对时频的二维联合函数积分求得[5],通过选择不同的核函数,可产生不同的时频分布[6],主要包括Bord-Jondan分布、Choi-Williams分布和平滑伪Wigner-Ville分布等。Bord-Jondan分布效果稍好且不存在尺度因子选择的问题,所以本文采用Bord-Jondan分布来实现雷达辐射源的时频二维图。Bord-Jondan时频分布表达式如下:
(1)
(2)
式中:φ(t,τ)为核函数。本文采用5种常见雷达调制类型,即频移键控(Frequency Shift Keying,FSK)、二进制相移键控(Binary Phase Shift Keying,BPSK)、连续波(Continuous Wave,CW)雷达、线性调频(Linear Frequency Modulation,LFM)、非线性调频(Nonlinear Frequency Modulation,NLFM)。上述信号采用全频段信噪比,加入随机高斯白噪声,全频段带宽取50 MHz,采样频率取100 MHz。其中,FSK上下频分别为20 MHz和30 MHz;BPSK载频25 MHz,带宽5 MHz;CW载频为30 MHz;LFM中心频率为30 MHz,调频宽度为17 MHz;NLFM中心频率为25 MHz,调频宽度为10 MHz。为便于后续处理,本文均采用灰度图像。本文采用的FSK、BPSK、CW、LFM、NLFM这5种调制信号在0 dB信噪比下雷达辐射源的Bord-Jondan时频分布图像如图1所示。

图1 Bord-Jondan时频分布图像
2 脉冲神经网络基本原理
脉冲神经网络被誉为第三代人工智能网络。神经元是脉冲神经网络的重要组成部分,通过神经元之间的脉冲传递来模拟大脑工作。从本质上讲,第二代神经网络的神经元“M-P模型”[7]是基于脉冲序列的速率编码,是一种简略的脉冲序列编码模式。SNN像大脑那样利用脉冲的精确时间点来提供稀疏而强大的计算能力[8]。在专有神经形态硬件(如TrueNorth[9]或SpiNnaker等[10])上运行的脉冲神经网络,完成相同任务其功耗仅仅是传统神经网络的数千分之一[11],应用前景十分广阔。
经典的神经元模型有Hodgkin-Huxley模型[12]、LIF(Leaky Integrate-and-Fire)模型[13]和SRM(Spiking Response Model)模型[14]。脉冲神经网络的模拟策略主要包括时间驱动、电压驱动和事件驱动。因为SRM模型使用显式的V-t方程来描述神经元的活动,不同神经元的活动可以异步计算[15],所以本文使用基于SRM模型的事件驱动策略。使用脉冲神经网络识别雷达信号调制类型流程如图2所示。

图2 基于脉冲神经网络的雷达辐射源调制类型识别流程
3 脉冲神经网络构建
3.1 脉冲神经网络学习策略
脉冲神经网络通过调整神经元之间连接突触的权重来进行学习特定的任务。与大多数机器学习算法相似,脉冲神经网络也分为无监督学习和有监督学习。其中,无监督学习方法以STDP(Spike-Timing-Dependent Plasticity)为代表[16],而有监督学习方法中Tempotron最为常用[17]。
单个Tempotron可以对输入数据进行加权求和,输出0或者1来进行二分类。可通过增加Tempotron个数完成多分类问题。Tempotron的膜电位定义为
(3)
式中:ωi是第i个突触的权重;ti是第i个突触上脉冲到达的时间;Vreset是重置电压;K(t-ti)是因输入脉冲引突触后神经元膜电压的变化,表达式为
(4)
式中:V0是归一化常数,τ是时间常数,τs是突触电流时间常数,后一项的含义代表突触上的电流会随着时间衰减。从式(4)中可以看出,在ti时刻,突触后神经元膜电压瞬间增大,随着时间t的流逝逐渐减少。
3.2 使用Tempotron神经元进行识别
使用Tempotron组成的SNN网络通常使用梯度下降法来优化网络参数[16]。以二分类为例,损失函数可以写为
(5)

(6)
式中:K的表达式与公式(5)相同,λ为每次更新权重时更新数值的幅度,tmax表示在一个时间窗口(0,T)内该输出层神经元达到电压最大值Vmax的时间。同理,当该输出层神经元输出为0但目标是输出1时,此次更新就会对每个权重增加一个上面的数值,结果就是增大了输出层神经元的膜电位,最终达到发放脉冲的目的。
3.3 输入信号编码
本文使用高斯调谐曲线编码器,这一编码器可以在时间维度上并行地将输入数据转化为脉冲发放时刻[18]。设一组数[Imin,…,Imax]共n个,每个数使用m个神经元的脉冲来表示,故这一组数需要m×n个神经元。对于第i个数,首先计算出m条高斯曲线均值和方差:
(7)
(8)
式中:Imin和Imax分别是一组数[Imin,…,Imax]中的最小值和最大值;n是这组数的个数;μ和σ分别为这组数的均值和方差;β是调整参数,介于1和2之间,β=1.5效果最佳。本文的脉冲神经网络的输入为雷达信号时频图像素点亮度大小x,然后将像素亮度x转化为各个神经元对应的高斯函数值,这些函数值介于[0,1]之间。最后将这些函数值线性转换到[0,T]的编码周期上,即将雷达辐射源二维时频图的像素点亮度x转化为m个神经元的脉冲发放时间。
以神经元数量m=10,编码周期T=10为例,编码如图2所示:有编号0~9共10个神经元,对于输入x,这几个神经元对应值分别为{*,*,*,9,4,1,7,*,*,*}。其中,对于脉冲发放时间t>9的神经元,可认为不发放脉冲,记为“*”。编码周期通常取整数,因此脉冲发放时刻也进行取整操作。活动神经元的编号为3、4、5、6,它们分别在9、4、1、7时刻发放脉冲。
3.4 脉冲神经网络结构
为减少运算量,首先将时频图像等比例转换为32 pixel×32 pixel并中心裁剪为28 pixel×28 pixel尺寸大小,然后将每个像素点的亮度值编码由m个神经元发放的特定脉冲串,最后将脉冲串送入单层的由Tempotron组成的神经网络进行识别。以输入为BFSK、神经元组数量m=16为例,事件驱动的脉冲神经网络如图3所示。

图3 输入信号x转化为10个神经元脉冲发放时间
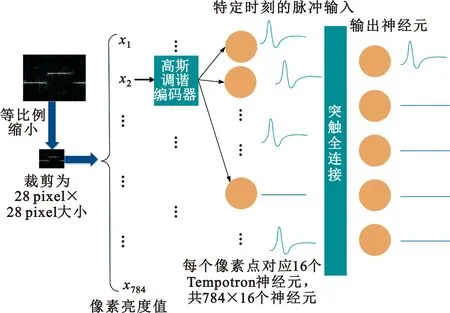
图4 事件驱动脉冲神经网络示意图
BFSK时频二维图为类别1,只有正确分类的神经元(第1个)具有输出脉冲,其他神经元则保持沉默。基于脉冲神经网络的雷达辐射源调制类型识别算法流程伪代码如下:
Input:雷达序列信号X,训练轮数R
Output:权重模型W
1 对雷达信号X进行时频变换,得到5种雷达时频图像Images和标签y
2 将Images裁剪为28 pixel×28 pixel尺寸大小
3 超参数初始化,当前轮次计数r←1,权重随机生成
//学习率,batch_size,神经元组数量,迭代次数,编码周期等超参数初始化
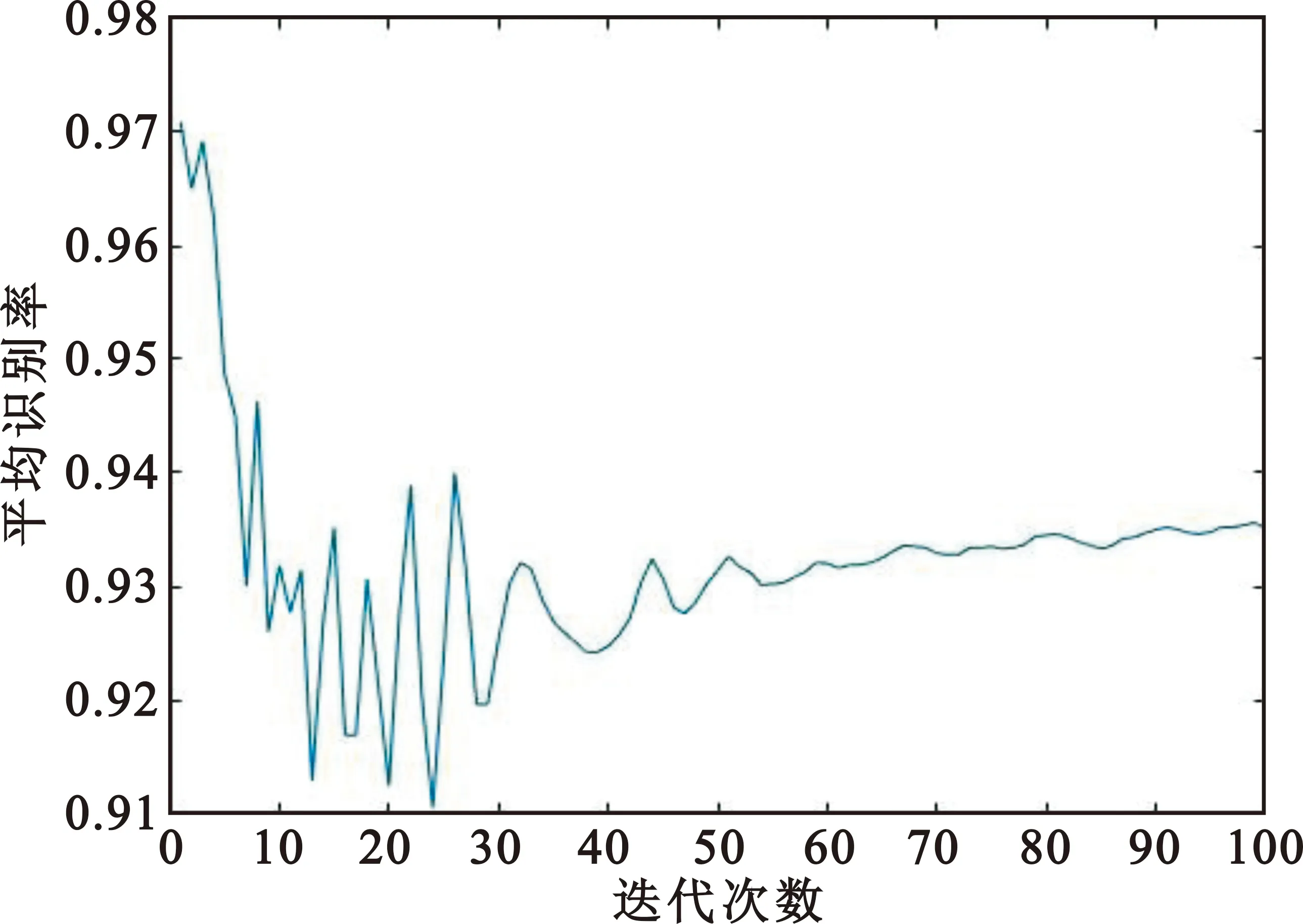
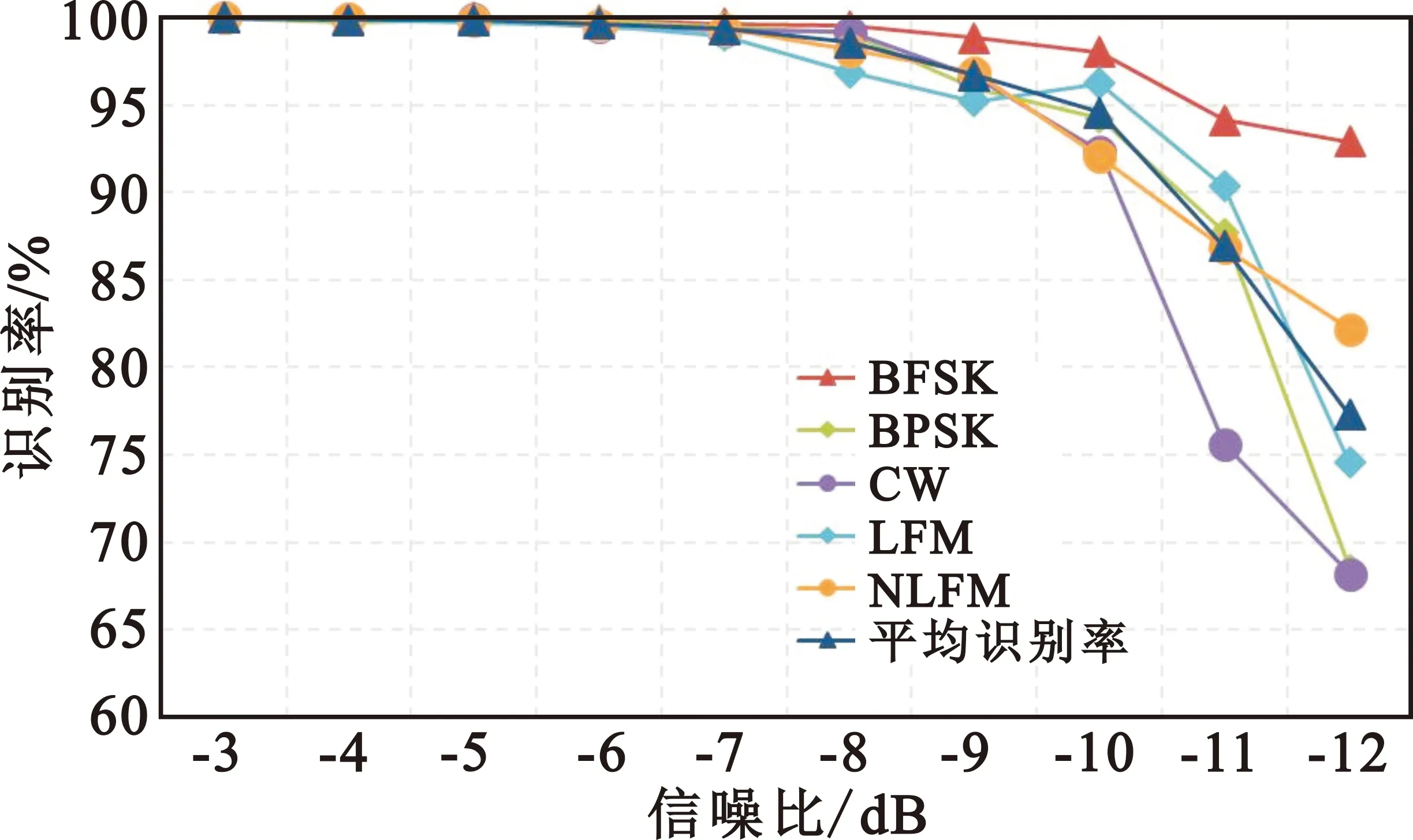
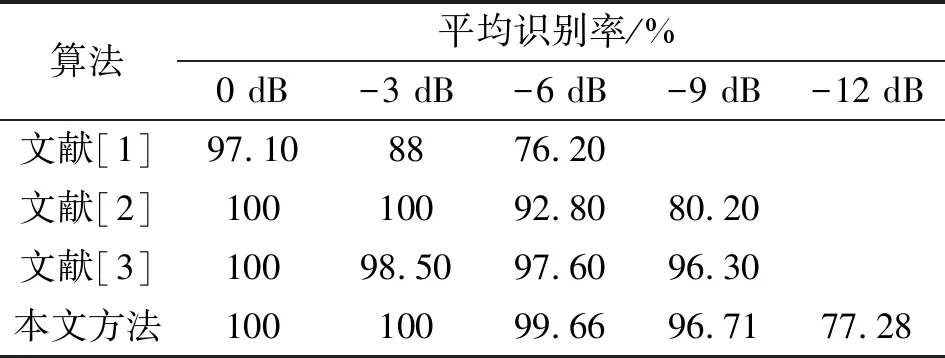
4 whiler 5 将Images中像素点亮度转化为Tempotron神经元脉冲发放时间//使用高斯调谐编码器 8 更新权重W 9r←r+1 10 end 11 return权重模型W 为验证本文提出的基于事件驱动脉冲神经网络用于雷达辐射源调制类型识别的有效性,采用第1节所述5种常见雷达信号进行仿真实验。每种类别分别产生10 000张共50 000张训练集时频图像,验证集和测试集每种类别产生2 000张共10 000张测试时频图像。本实验硬件环境:CPU为Intel i7-7700K@4.20 GHz,GPU为TITAN X。软件环境:python3.7,pytorch1.7,并使用CUDA10.1进行运算加速。超参数设置:batch_size为64;学习率为0.001;每个像素点用16个神经元的脉冲来表示;迭代次数为100;编码周期为100。 为探究网络结构参数对识别率的影响,首先取信噪比为-10 dB的5种辐射源信号进行识别,不同迭代次数对平均识别率的影响如图5所示。从图5中可以看出,随着迭代次数的增加,基于事件驱动的脉冲神经网络正确率反而有所下降。 图5 迭代次数和信噪比之间的关系 信噪比-10 dB下,循环次数3轮,使用不同数量的神经元进行高斯调谐曲线编码,其他条件不变,结果如表1所示。 表1 神经元个数对平均识别率和时间的影响 通过表1发现选择合适数量的神经元是重要的,神经元个数较少,识别率较低;但神经元个数过多,耗时又较长,并且神经元数量进一步提高也不一定代表准确率会提高。综合训练时间和平均识别率,选取神经元个数16为最佳。 现epoch选择3轮,神经元选择16个,做5组实验取平均值。信噪比-3~-12 dB,识别率的统计如图6所示。 图6 识别率与信噪比关系 从图6中可以看出,随着信噪比的提高,算法识别率逐渐提高。这主要是因为随着信噪比的提高,时频图像特征更加显著。在信噪比为-3 dB时,识别率可以达到100%;当信噪比为-10 dB时,该网络依然可以有较高的识别率;当信噪比进一步下降至-12 dB时,平均识别率大约在77.3%。信噪比为-10 dB和-12 dB的混淆矩阵如表2所示。 表2 不同信噪比下测试集的混淆矩阵 文献[1]采用自动编码器进行辐射源识别,信噪比在-6 dB时检测效果已经明显下降。文献[2]采用传统卷积神经网络进行辐射源识别,信噪比在-9 dB时识别效果不佳。文献[3]将传统卷积神经网络进行改进,检测效果有所提升。本文方法作为一种类脑机制的雷达辐射源调制类型识别方式,与其他文献比较的平均识别率如表3所示。由表3可以发现,本文方法抓住了雷达辐射源时频二维图的特征。 表3 不同雷达辐射源调制类型识别方法的平均识别率 模型训练完成后,本方法测试全部10 000张时频二维图,所需时间为14.12 s,平均每个样本所需时间约为1.4 ms,可以满足实时性检测的要求。 相对于基于第二代神经网络,脉冲神经网络作为一种新型网络结构,具备更接近真实神经元的工作方式,拥有着类脑结构和广阔的应用前景。实验结果表明模型训练完成后,脉冲神经网络可以对雷达辐射源调制类型进行实时检测,并能取得良好的效果。但目前基于GPU仿真的脉冲神经网络无法体现出来快速运算和低功耗的特点,在神经态计算芯片(如TrueNorth或SpiNnaker等)上部署脉冲神经网络是下一步研究的方向。4 仿真实验及分析


5 结束语
