柔性电负荷平衡装置对孤岛电网调频过程的影响研究
2022-02-12徐思佳
徐思佳
(中国电建集团江西省电力设计院有限公司,江西 南昌 330201)
0 引言
电力系统在正常运行时,电网中的发电功率与 用电功率相等,电网的频率保持稳定[1]。发电机具备一定的调节能力,当负荷功率发生变化时,发电机可以通过调速系统调整发电功率,维持功率平衡,保持频率稳定[2]。然而,处于孤岛运行的电网的发电机装机规模有限、旋转备用较小[3],其调节能力有限[4]。孤岛运行作为一种特殊但又真实存在的电网运行方式,具有规模小、自平衡能力差的特点,任何负荷扰动都可能给孤岛电网频率带来较大的波动,甚至引发电网崩溃。因此维持频率稳定对保证孤岛电网长期稳定运行具有重大意义[5—6]。如何制定频率控制策略,避免电力系统运行情况因扰动迅速恶化成为研究的热点[7]。孤岛电网一般采用一次调频对系统频率进行调整,调差系数、调频死区和超速保护控制器(over speed protect controller,OPC)定值设置是影响一次系统调频能力的主要因素[8—10]。一次调频结合二次调频,可对电力系统频率进行无差调节[11],通过超短期负荷预测对系统一、二、三次调节进行时序配置,可实现对孤岛频率的针对性控制[12—13]。
文献[8]分析了一次调频的工作原理,并针对调差系数、比例-积分-微分控制对系统频率变化的影响进行了讨论;文献[8—10,14]未考虑系统内其他设备的调频能力,因此文献[15—16]提出利用系统内现有的储能设备和智能小区内的电动汽车充电桩对电网功率进行平衡,达到调频的效果;文献[17]提出微型电网中负荷模型应考虑系统频率变化而非常规的恒定频率模型;文献[18]提出负荷频率因子和高抗补偿度也会对系统频率产生影响,建立了一种考虑负荷的系统调频模型;文献[19]以马达为例讨论了孤岛等阻抗与电网低压高频现象的联系,提出出现低频现象时应当针对负荷类型进行精确减载。鉴于上述方法无法实现系统频率的无差调节,文献[11]通过在换流器中引入频率偏差的积分控制,使换流器参与交流系统二次调频以实现对系统频率的无差控制;文献[12]将超短期负荷预测引入孤岛调频模型,对调频设备出力进行时序上的调整,进一步提高系统调频效率。上述文献集中讨论了如何利用发电机或线路中已有储能设备进行调频,但这些调频策略在部分缺乏大型储能设备的孤岛系统中略显乏力。单纯依靠线路中的负载,无法避免大电网突甩大负荷时高频现象的发生。当存在大负荷并入系统或从电网断开时,系统可能会出现发电机调频乏力的情况,为避免发电机解列或者切除部分线路导致生产秩序混乱,须进一步分析对负荷端的调频能力。
文中提出在孤岛系统中负荷端并入具有稳定调频能力的柔性电负荷平衡装置(flexible electric load balancing device,FELBD)来平衡供需功率,建立负荷端调频模型实现极短时间频率的快速调节,并采用电力系统仿真平台进行仿真对比研究,实现突甩大负荷情况下系统频率的无差控制。
1 基于晶闸管的FELBD
基于晶闸管的FELBD主要由晶闸管开关和镍铬合金的金属电阻器串联组成,由电阻器来消耗系统多余的有功功率。但是电阻受热后温度上升,电阻阻值会增大,在电压不变的情况下,电阻功率会下降。根据其镍铬含量的不同,电阻的温度系数不同,热态下的阻值是冷态阻值的1.05~1.6倍不等。采用晶闸管开关进行调节可以很好地解决阻值变化的问题。
在大功率电力电子产品中,应用最多、最成熟的电力电子器件是晶闸管和绝缘栅双极型晶体管,后者造价昂贵,控制复杂且故障率高,电子负荷采用晶闸管控制,在性能和工程应用上更具性价比[20]。晶闸管还具有调节平滑、响应速度快、调节次数不限等优点。晶闸管阀组的设计借鉴了静止无功补偿器中晶闸管及阻尼回路的设计[21—22]。
FELBD的等效单相电路模型见图1。该装置通过改变电力电子元件晶闸管在每个周期的导通角来改变功率元件上的电压和电流,进而改变整体的功率输出,如图2、图3所示。其中,ui为晶闸管装置外部端电压;ia为流过晶闸管装置的电流;θ为装置导通角;α为装置触发角;ug1,ug2分别为VT1和VT2的触发脉冲;黑色阴影部分为到晶闸管导通时输出的有功/无功功率。电子负荷装置的主要控制手段是控制α,最终通过改变功率运行点实现冲击负荷补偿、频率振荡抑制等高级功能[23]。频率阻尼控制一般作为控制器的辅助功能,通过在主控制回路上叠加一个控制信号实现阻尼抑制[24]。
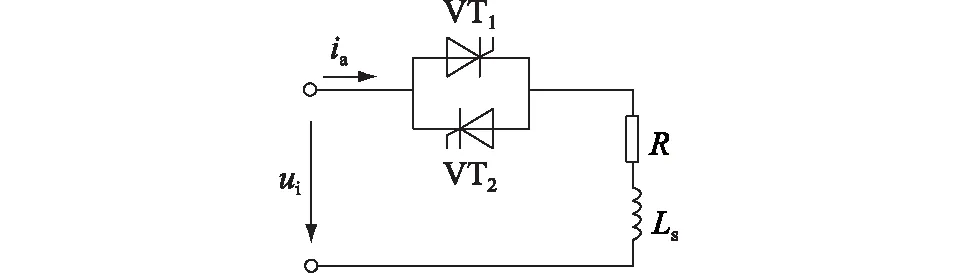
图1 FELBD电路模型Fig.1 FELBD electrical model
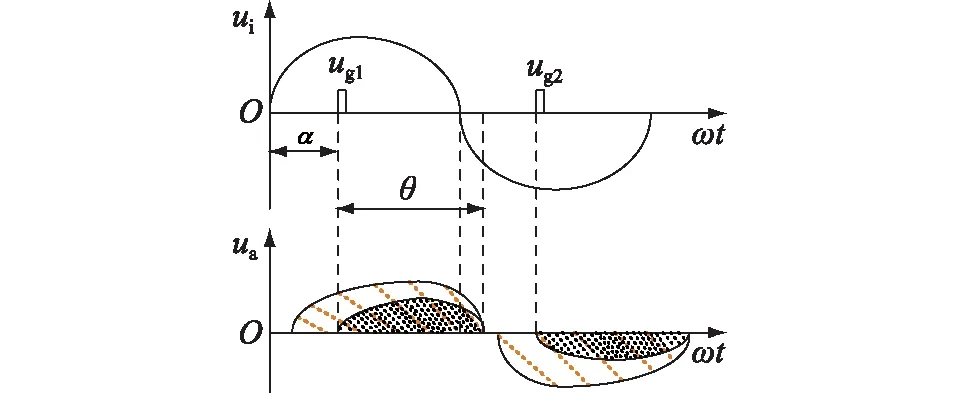
图2 FELBD电压和电流Fig.2 Voltage and current of FELBD
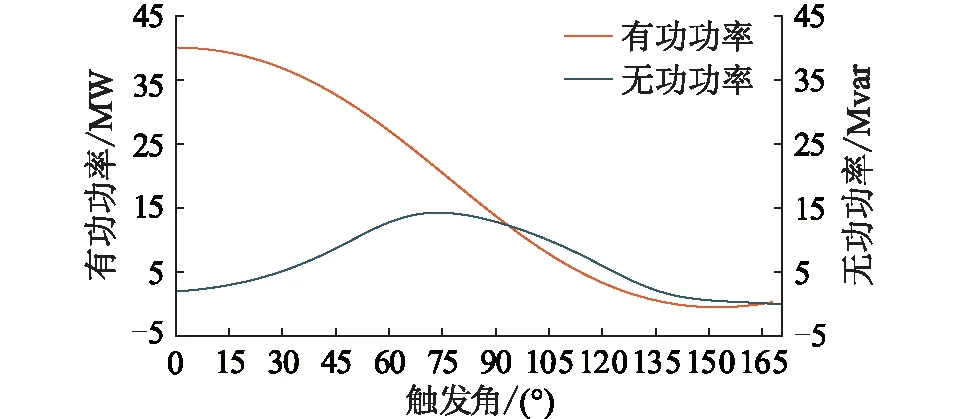
图3 FELBD触发角和有功及无功功率曲线Fig.3 Trigger angle and active power and reactive power curves of FELBD
2 负荷调频模型
2.1 电力系统频率特性
现代社会生产中绝大多数设备都具备相应频率特性,系统频率的大幅度波动将影响电子设备工作,甚至损坏设备。系统频率偏差为:
(1)
式中:fN为系统额定频率;fO为系统实时频率;KS为系统的单位调节功率;ΔP为系统功率偏差。
系统功率偏差ΔP由发电机端总输出功率与负荷端总需求功率决定,因此有:
ΔP=PG-PL=PLR-PL
(2)
式中:PG为发电机端总输出功率;PLR为负荷端实际总消耗功率;PL为负荷端总需求功率。
发电机总输出功率与负载端总需求功率可由各电机输出功率与各负载需求功率求得:
(3)
(4)
式中:PGi为第i台发电机的输出功率;J为系统中的负载数;PL j为第j个负载的需求功率。
2.2 负荷端调频模型
FELBD具有投切响应速度快、时序性好、高可靠、易控制的特点,通过添加FELBD可以对PL进行调整,从而消除系统功率偏差,进而解决发电机端调频能力受限的问题。而孤岛电网系统相对较小,因此改变负荷端需求功率成为可能,其主要依靠FELBD实现对电力系统中多余功率的吸收。
孤岛电网可能会出现以下2种典型工况。
(1) 突甩大负荷。孤岛电网运行状态下,突甩大负荷的具体情况如图4所示。
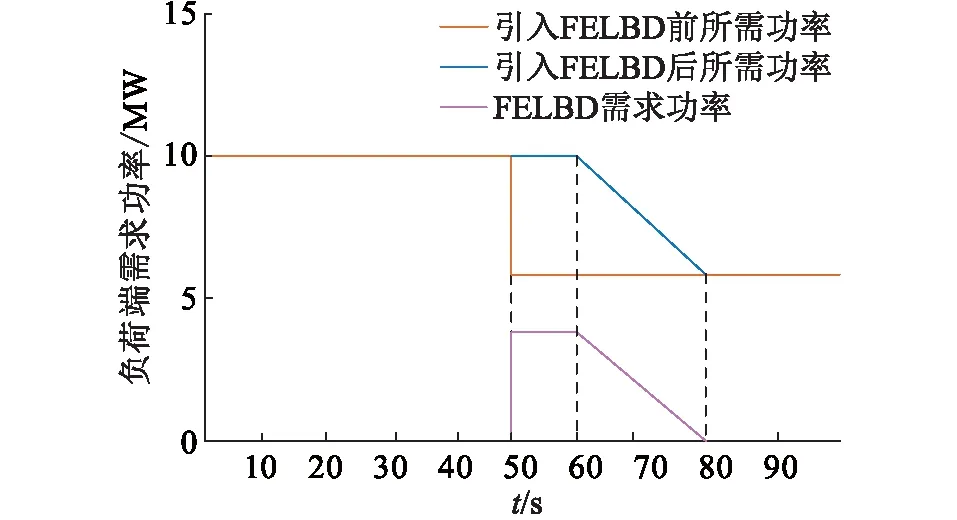
图4 突甩大负荷情况下负荷变化曲线Fig.4 Load change curves during load fast cutting
在50 s之前,系统处于稳定状态,此时系统发电机端总输出功率,负荷端实际总消耗功率和负荷端总需求功率三者相等。在50 s时,因为大容量负荷突然甩开造成负荷端总需求功率突降,此时PLR大于PL,导致电网频率上升。为防止冲击对发电机和生产设备造成巨大损耗加入FELBD,监视系统检测到负荷突降投入相应容量的FELBD维持PLR和PL的平衡,为发电机组进行调频争取时间,如50~60 s之间曲线所示。当被甩开负荷在短时间内不再需要启动时,孤岛电网将在60~80 s之间按时序依次切除FELBD。
加入FELBD后,由于下游突甩负荷,可以认为投入FELBD需要在极短时间内完成,因此可以认为是瞬时性的,此时负载端总需求功率为:
PL2=PL1+k*PLB
(5)
(6)
s.t. 0≤k*≤K
(7)
0≤-KSΔflim≤ΔP
(8)
式中:PL1为引入FELBD前的负荷端总需求功率;PL2为引入FELBD后的负荷端总需求功率;PLB为负荷平衡系统中单个FELBD负荷(也称为FELBD的分辨率);k*为电负荷平衡系统应投入设备个数;floor()为向下取整函数。当系统频率偏差高于系统允许频率正向波动上限Δflim时,系统将快速投入FELBD填补缺损负荷,维持系统平衡。假设系统中拥有K个FELBD,每个设备的负荷为PLB,则柔性电负荷平衡系统最多可以填补KPLB的负荷。
如系统短时间内无须重启负荷,可随时间逐渐切除FELBD,假设在TEB时刻系统已经开始切除负荷,则T时刻负荷端需求功率为:
(9)
(10)
kE(t)PLB≤(1-β)ΔPlim
(11)
式中:kE(t)为第t个单位时间内系统切除设备数;ΔPlim为发电机组单位时间增加最大出力;考虑要保留一定裕度,因此加入机组剩余出力裕度β。
FELBD最快切除时间为:
(12)
式中:ceiling()为向上取整函数。在最快切除情况下,不保留发电机组出力裕度或只保留极小裕度。
(2) 启动大负荷。孤岛电网运行状态下,启动大负荷的具体情况如图5所示。
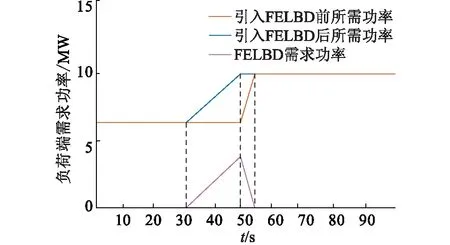
图5 启动大负荷情况下负荷变化曲线Fig.5 Load change curves under heavy load input
在50 s时下游有大容量用电负荷准备启动,首先在30 s时逐步投入FELBD,令PL在30~50 s之间根据发电机组调频能力缓慢上升,促使发电机增加出力从而达到提前增大PLR的目的,一旦监视系统检测到待接入线路负荷突升,马上切除相应容量的FELBD使PLR和PL保持动态平衡。期间设备切除情况如50~55 s之间FELBD需求功率曲线所示。
假设从TPB时刻开始,功率平衡系统根据即将接入的大容量设备功率需求投入FELBD,T时刻负荷端总需求功率应为:
(13)
(14)
kP(t)PLB≤(1-β)ΔPlim
(15)
式中:kP(t)为第t个单位时间内电负荷平衡系统投入FELBD数。
系统如要接入大容量设备,应提前最小预留时间TPmin通知系统,保证FELBD投入工作顺利完成。最小预留时间可由式(16)求得。
(16)
式中:PEXP为计划启动设备增加的容量。在最小预留时间投入情况下,不保留发电机组出力裕度或只保留极小裕度。
系统在TPF时刻完成FELBD投入工作,此时:
(17)
从TPF开始启动大容量设备,系统需要根据系统增加负荷对FELBD进行切除,切除规则如下:
(18)
(19)
式中:ΔPEXP(t)为实际负载在TPB至TPF内所增加负荷。
2.3 发电机端调频模型
FELBD的投入为频率调节争取了时间,但是由于其具有清晰度的约束,无法实现更精确的调频。为了实现电力系统的精确快速调频,需要将发电机调频与FELBD调频配合起来,系统频率控制模型如图6所示。
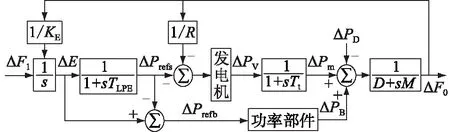
图6 系统频率控制模型Fig.6 System frequency control model
图6中,ΔE为频率偏差积分控制器增量;ΔPm为发电机输出功率增量;ΔPD为负荷需求功率增量;ΔPV为调节阀位置增量;ΔPB为功率部件输出功率增量, 为功率部件系统调频控制信号;ΔPrefb为发电机的调频控制信号;ΔPrefs为积分控制增益;KE为调速器调速系数;R为系统惯性常数;M为负荷阻尼系数;D为低通滤波器时间常数;TLPF为发电机时间常数;ΔF1为功率部件系统调频控制信号;ΔF0为系统频率调节量;Tt为时间常量。
发电机调速主要由汽轮机调速系统、励磁系统和电力系统静态稳定器三部分实现。
汽轮机调速器系统控制原理如图7所示。其中,W,Wref分别为汽轮机转速与设定额定转速;Fhp为汽轮机再热器前轴总容量;Tc为控制放大器时间常数;Tch,Trh分别为蒸汽箱时间常数和再热器时间常数;Tsr为速度继电器时间常数;P为有功功率的额定值;PMAX,PMIN分别为汽轮机有功调节量的最大值和最小值;s为拉普拉斯算子;Thp为总时间常数。
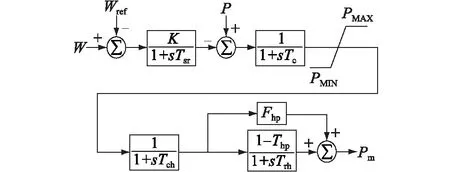
图7 汽轮机调速器控制模型Fig.7 Turbine governor control model
汽轮机调速器的传递函数可根据图7求得:

(20)
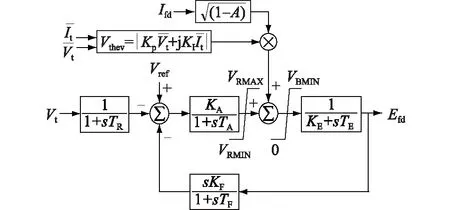
图8 励磁系统控制模型Fig.8 Excitation system control model
频率滤波器时间常数A可由式(21)得到。
(21)
式中:XL为电位源电抗;Ifd为同步机励磁电流。
励磁系统的传递函数可根据图8求得:
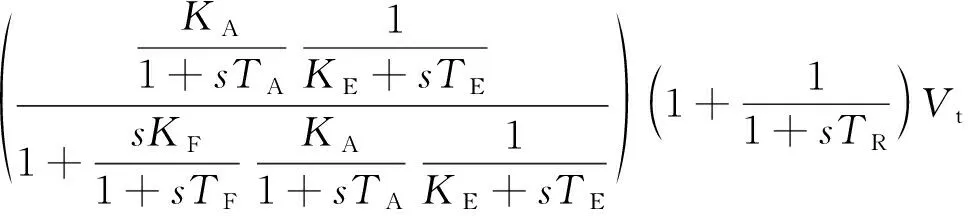
(22)
系统静态稳定器作为励磁系统的附加装置,具有抑制有功振荡功能,控制原理如图9所示。
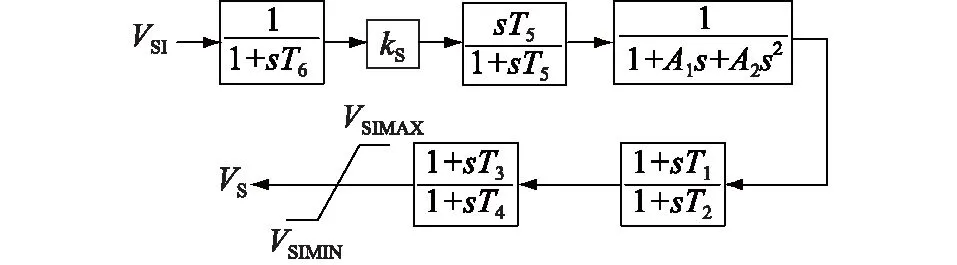
图9 系统静态稳定器控制模型Fig.9 System static stabilizer control model diagram
发电机转速、发电机端电压和系统频率均可以作为系统静态稳定器的输入,其中KS为系统静态稳定器收益;A1,A2为频率滤波器时间常数;T1,T3为超前补偿时间常数;T2,T4为滞后补偿时间常数;T5为冲洗时间常数;T6为传感器时间常数;VSI为稳定器装置输入的电压标幺值;VS为稳定器输出电压标幺值;VSIMAX,VSIMIN分别为稳定器系统输出电压的最大和最小标幺值。
系统静态稳定器的传递函数可根据图9求得:

(23)
3 实例分析
文中采用印尼苏拉威西某工业园数据在ETAP平台上进行计算,该工业园位于苏拉威西岛上,负荷完全由岛上150 MW机组供电,属于典型的孤网运行。该电网150 MW机组经升压变与供电端110 kV母线相连接,通过双回联络线,由负荷端110 kV母线经降压变连接0.485 kV母线对48 MW负载进行供电。负荷包含电炉在内的多种时变非线性设备,电极动作、电炉放渣会导致系统出现大幅功率波动,塌料、电极烧断更会令部分负荷在一定时间内降低至零,对系统造成冲击。电炉设备的仿真等效模型如式(24)所示。
R(t)=CLe1/{A+B[1-cos(2ωt+D+θ)]}
(24)
式中:ω=2πf,f为系统频率,取50 Hz;θ为电流滞后电压相位角,功率因数cosθ=0.92;D为电弧热惯性影响因子;A=T0/a;B=(T1-T0)/(2a);T0为电弧最低温度,取1 250 ℃;T1为电弧最高温度,取1 500 ℃;L为电弧弧长,取平均值2 m。
为了避免系统频率出现长时间大幅度扰动,园区采取同时考虑负荷端与发电机端的频率控制模型。其中负荷端利用6回路共60 MW功率调节模块对系统频率进行快速调节,每回路包含10 MW功率部件,FELBD采用分辨率为0.1 MW的基于晶闸管的柔性负荷平衡系统[18—19];机端采用汽轮机调速器、IEEE T3励磁系统和IEEE T1电力系统静态稳定器对系统频率进行精准调节,其中汽轮机调速模型采用下垂控制方法,电力系统静态稳定器以电机角转速为输入,汽轮机调速器、励磁系统和电力系统静态稳定器参数如表1—表3所示。
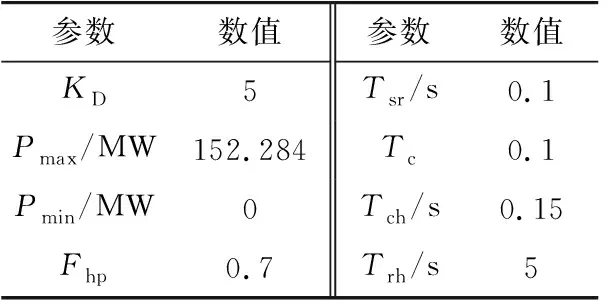
表1 汽轮机调速器参数Table 1 Turbine governor parameters
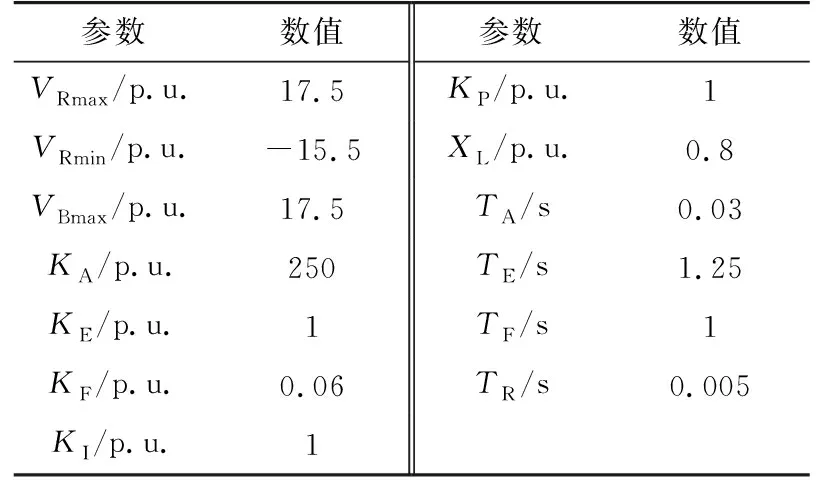
表2 励磁系统参数Table 2 Excitation system parameters
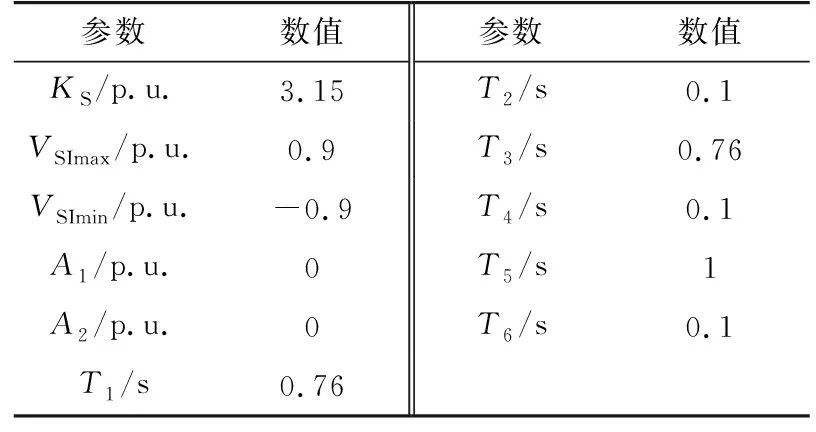
表3 电力系统稳定器参数Table 3 System static stabilizer parameters
利用ETAP仿真平台针对突甩负荷和增加负荷2种工况进行仿真,图10为采用上述参数时突甩负荷系统频率变化情况。由图10可知,一回48 MW负荷线路在t=1 s时突甩负荷,负荷端功率在短时间内大幅减少造成系统功率供需不平衡,机端发出功率大于负荷实际需求功率,导致系统频率快速上升,调速系统立即开始对系统进行一次调频。调速系统只能进行有差调节,因此系统频率最终稳定在50.2 Hz左右,在0~5 s期间,频率波动达到0.2 Hz以上。当FELBD投入工作后,系统频率得到明显改善。
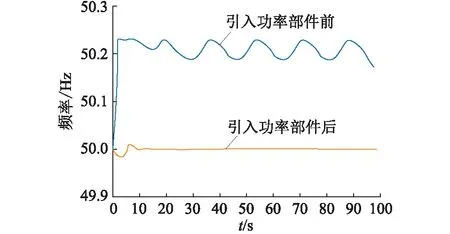
图10 引入功率部件前后突甩负荷频率曲线Fig.10 Frequency curve at fast load cutting with andwithout the introduction of power components
电网突甩负荷后,监视系统发现异常工况后即刻对系统功率平衡情况进行分析。经计算发现,单纯依靠机端调速系统无法快速将频率控制在允许范围内。根据监视系统得到的被甩负荷数值在t=1.2 s时刻投入48 MW的FELBD。系统频率在短暂的振荡后迅速稳定在49.983 Hz。由图10可知,在频率冲击发生后的最大频率波动只有0.05 Hz,要远小于不投入FELBD时的波动。
通过自动控制系统对投入的FELBD进行调节,频率最终稳定位置也会发生变化,如图11所示。当投入44 MW时,在t=10 s时刻系统频率基本稳定在50 Hz,说明加入FELBD可以在突甩负荷情况下实现对系统频率的无差调节。
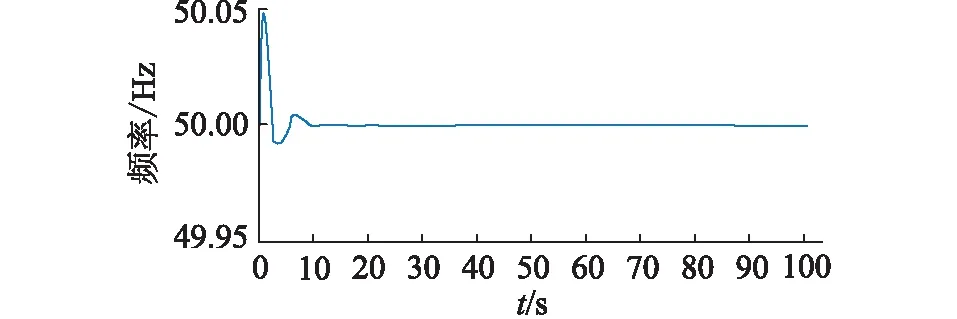
图11 无差调节频率曲线Fig.11 No-adjustment frequency curve
图12为采用上述参数时接入大负荷工况下频率变化情况。在t=51.1 s时刻系统有一回48 MW负荷线路接入系统,负荷端功率在短时间内大幅增加导致系统功率供需不平衡,系统频率在5 s时呈断崖式下跌,最终稳定在49.8 Hz左右。这样的频率波动会对系统内的设备造成损坏,给电机调频带来巨大压力。为了缓解电机调频压力,可提前投入FELBD。
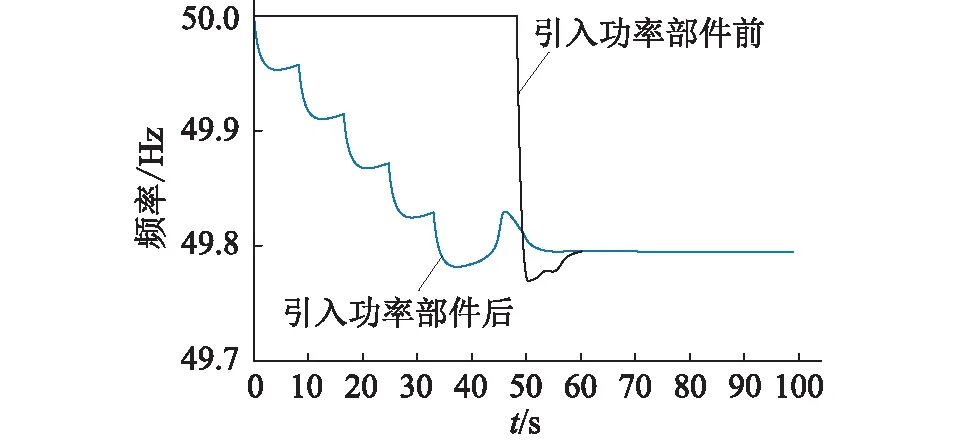
图12 引入功率部件前后接入大负荷频率曲线Fig.12 Frequency curve of heavy load input with and without the introduction of power components
监视系统得知1 min后有一回48 MW负荷线路需接入电网,系统判断此行为将对电网频率造成巨大冲击选择提前投入FELBD,从t=1 s时刻开始,每10 s投入10 MW的FELBD,至t=41 s时刻投入4 MW的FELBD,在t=51 s时刻退出所有FELBD并在t=51.1 s时刻将负荷线路接入系统。由图12可知,虽然系统频率最终依旧稳定在49.8 Hz左右,但是通过引入FELBD使得断崖式下跌区间被拆分成多个部分,引入大负荷线路对系统造成的冲击得到缓解。
4 结论
文中简要介绍了基于晶闸管的FELBD的基本原理。在传统发电端和负荷端的调频模型的基础上引入FELBD的调整函数,通过实际工程的仿真分析比较了2种情况下的频率响应曲线,得出以下结论:
(1) 在系统将接入大负荷前预先按梯次投入FELBD可以避免系统频率断崖式下跌的情况,减小频率波动对系统内设备造成的压力,大负荷接入系统前的提前调度对保持系统频率稳定至关重要。
(2) 在系统突甩大负荷的情况下投入FELBD可以使频率快速恢复稳定,大幅减小因系统功率供需不平衡导致的频率波动。
(3) 在突甩大负荷情况下,通过合理分配所投入的FELBD,可以实现对系统频率的无差调节。
本文得到中国电建集团江西省电力设计院有限公司科技项目(JXEPDIKJ202001)资助,谨此致谢!
