化工园区应急响应阶段应急救援与疏散双向路径规划
2022-02-12陈培珠陈国华门金坤
陈培珠,陈国华,门金坤
(1 华南理工大学安全科学与工程研究所,广东 广州 510640;2 广东省安全生产科技协同创新中心,广东 广州 510640)
化工园区(chemical industrial park,CIP)应急响应在时间和空间上存在动态性与协同性等特点,其响应过程通常是从园区内向园区内外协同升级,涉及企业内部应急响应、园区内部应急响应、园区内外协同应急响应三个阶段。应急救援(emergency rescue,ER)与应急疏散(emergency evacuation,EE)作为突发事件应急响应的重要环节,对化工园区危险化学品事故应急响应的开展具有重大影响。2011年7月11日,大亚湾经济开发区石化区发生火灾事故,在应急响应过程中疏散人员发生交通事故,造成1 人死亡1 人重伤。2019 年3月22日,江苏盐城响水化工厂爆炸16h后现场应急救援车辆发生拥堵,消防车辆排起长队参与应急救援。这两起事故中的交通拥堵问题分别属于园区应急响应过程中的内部阶段和内外协同阶段。一方面在园区内部应急响应阶段没有同时考虑人员疏散和应急救援车辆的路径规划。受化工园区潜在事故多米诺效应的影响,通常化工园区应急救援疏散不仅要着眼于既发事故的影响范围,同时还要考虑潜在的次生事故。化工园区内企业要比单独企业发生事故时涉及的应急疏散救援人员与范围更多、更广。由于化工园区内路网较为简单,当有大范围的应急救援疏散人员及车辆在路网内进行双向移动时,采用独立的应急救援与应急疏散路径规划模型计算得出的方案极有可能使两者在道路上发生冲突导致道路拥堵,影响救援时效。另一方面,在园区内外协同响应阶段没有同时考虑应急救援车辆的入园和撤离路径规划。为提高救援时效,外来应急救援车辆到达园区后通常直接前往事故点开展救援工作。缺少对救援车辆的撤离路线规划,已用完应急资源的车辆无法退出,后续的救援车辆无法进入,极易出现道路堵塞。又由于园区企业内部应急响应的范围主要是在企业内部,对园区路网的影响较小。结合上述分析,当前对化工园区危化品事故应急响应的决策需求主要是围绕园区内部与园区内外协同应急响应期的应急救援与应急疏散双向路径规划,因此,本文重点针对化工园区应急响应中的园区内部与园区内外协同应急响应期两个阶段的应急救援与应急疏散进行规划研究。
对应急救援与应急疏散的研究,主要集中在探索车辆路径优化模型、人员疏散模型、模型算法等领域。应急救援模型的优化目标研究主要集中在物资调度、行程时间、运输成本、运输安全等方面。应急疏散模型的研究主要集中在微观建模仿真与人员疏散实验等方面。考虑实时事故后果或实时风险的动态路径规划也是一个比较新的研究方向。在现有应急救援与应急疏散路径规划研究中,其模型通常分开考虑单向应急疏散或应急救援。
为实现化工园区应急救援与应急疏散双向无冲突的应急响应,Chen等改进了传统的单向应急救援或应急疏散路径规划模型及路径优化算法,建立了考虑智能避障的化工园区内部应急响应阶段的应急救援与应急疏散路径规划方法。本文在前期提出的园区内部应急响应阶段的路径优化决策方法的基础上,研究应急响应不同阶段决策需求,构建化工园区应急响应两阶段的应急救援和应急疏散路径规划与智能避障模型,应用Dijkstra 算法对模型进行计算,在满足可靠性的基础上实现同时规划不同应急响应阶段内两种agent 的最优路径,为化工园区应急决策提供更切实可行的应急救援疏散方案。
1 问题描述
agent即为智能体,是仿真模型中的基本单位,是具有主观决策能力的个体。化工园区事故两个应急响应阶段中,在园区路网中存在四类agent。园区内部应急响应阶段为园区内的应急救援(emergency rescue belonging to CIP,ERB)agent 和应急疏散人员EE agent,其分别代表应急救援车辆及人员与应急疏散人员;园区内外协同应急响应期为园区外进入园区的应急救援(ER agent outside entering CIP,EROE)agent和园区内离开园区的应急救援(ERB agent leaving CIP,ERBL)agent,如图1所示。
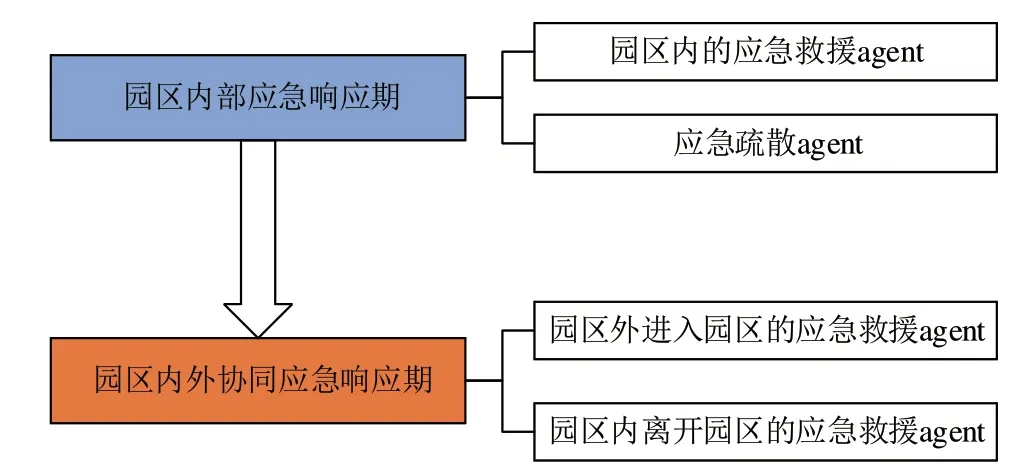
图1 化工园区应急响应两阶段的多agent结构
在园区内部应急响应阶段,化工园区ERB agent 与EE agent 在园区路网中的移动过程,为ERB agent 从消防站点向事故发生点和EE agent 从事故发生点到应急避难点的双向移动。在园区内外协同应急响应阶段,EROE agent 与ERBL agent 在园区路网中的移动过程为:EROE agent 从园区入口向事故发生点和ERBL agent 从事故发生点到园区出口的双向移动。分析两个阶段的响应特性,园区内部应急响应阶段是短期的,通常为十几分钟,园区内外协同应急响应阶段是相对长期的、连续的。为避免应急响应过程中多agent 由于移动路径发生冲突导致道路拥堵,影响应急时效,建立化工园区应急响应两阶段的应急救援与应急疏散的智能避障规则。
定义园区内部应急响应阶段中的ERB 和EE双向移动agent 的移动路径为互不兼容的动态障碍,在此假定条件下,园区内部应急响应阶段ERB agent 和EE agent 的智能避障移动规则如图2 所示。时刻,ERB agent 位于位置,EE agent 位于位置,如图2(a)所示。在+1 时刻:①如果不考虑智能避障,双向agent 此时的最优移动方向同为位置,在+1时刻则会发生冲突,如图2(b)所示;②为确保疏散人员第一时间疏散到安全地点,在+1时刻EE agent 按照原计划最优移动方向前进,ERB agent 则重新规划整条路径,移动至另一较优移动方向位置,如图2(c)所示。园区内部应急响应阶段的双向ERB agent 与EE agent 移动过程中的智能避障,既需要确保相对运动中的ERB agent 与EE agent 不发生碰撞,还能够满足双向移动agent 均可按照较优路径进行规划。

图2 园区内部应急响应阶段的智能避障规则示意图
定义园区内外协同应急响应阶段中的EROE和ERBL 双向移动agent 的移动路径为互不兼容的固定障碍,在此假定条件下,园区内外协同应急响应阶段EROE agent 和ERBL agent 的智能避障移动规则如图3 所示。时刻,ERBL agent 位于位置,EROE agent 位于位置,如图3(a)所示。与图2 相同,如果不考虑智能避障,双向agent在+1时刻则会发生冲突,如图3(b)所示。与图2 的区别在于,为确保应急救援车辆能够第一时间到达事故发生点并保障应急救援车辆入园和撤离路线的畅通,在+1时刻EROE agent 按照原计划最优移动方向前进,ERBL agent则重新规划整条路径,且两者的移动路径不能发生重叠,根据规划,ERBL agent移动至另一较优移动方向位置,如图3(c)所示。

图3 园区内外协同应急响应阶段的智能避障规则示意图
2 化工园区应急响应阶段应急救援与应急疏散路径规划模型
2.1 动态栅格法环境建模
由于双向移动agent 在园区路网中互不兼容,相当于在单向路径规划中增加了动态障碍。为使研究更加客观,在静态栅格法的基础上,采用动态栅格法对环境进行建模。
(1)建立静态栅格环境。以化工园区二维地理信息图为蓝本,建立[0,1]矩阵的静态栅格环境。使用0表征自由栅格,1表征障碍物。根据GJJ 37—2012《城市道路工程设计规范》(2016 版)中规定的城市道路等级及相应车道数来确定道路所占用的网格数量。
(2)初始化栅格。对环境栅格按照从左到右、从上到下的顺序进行编号。原点坐标(0,0),任意栅格坐标点可表示为(,)∈R,其中表示该栅格所在的行号,表示该栅格坐在的列号;={1,2,…,}表示所有栅格的集合。
(3)环境地图更新。设定栅格地图更新的频率为agent 移动一次的时间,将初始栅格地图与移动agent障碍对应的栅格叠加,形成新的搜索图。
2.2 应急响应两阶段双向路径规划数学建模
2.2.1 构建应急救援与应急疏散agent对象
ERB agent、EE agent、EROE agent和ERBL agent为化工园区应急响应两阶段的双向路径规划模型中最基本的仿真单元。根据化工园区应急决策过程,定义化工园区ERB agent、EE agent、EROE agent和ERBL agent 属性如下:“感知”为环境栅格图的更新,“agent 属性”包括各类agent 的坐标信息、起止点信息、路径的优化模型,“决策”为移动agent的路径规划,“行动”为移动路径。
化工园区栅格环境中,假设四类agent 的自由运动范围为[0,R],在活动范围内可以朝8个方向移动,agent移动权值如表1所示。
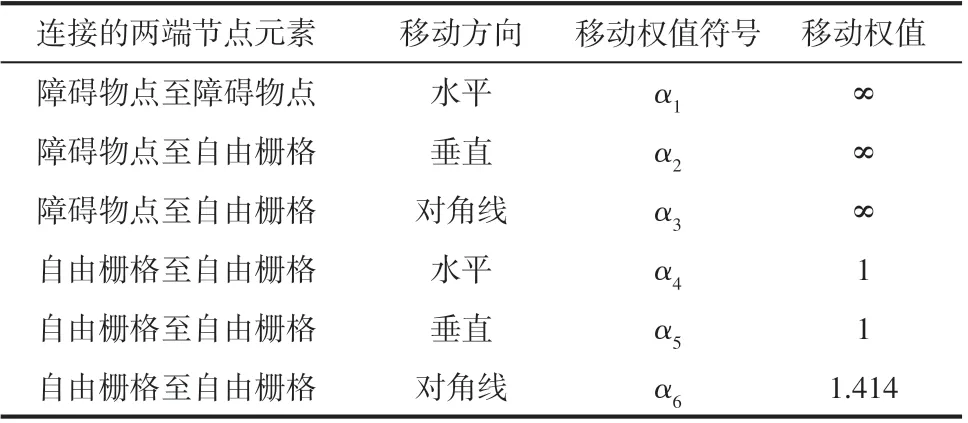
表1 agent移动权值关系
2.2.2 模型假设
文献[30−31]中栅格法环境建模内容,化工园区应急响应两阶段双向路径优化数学模型有如下假设:
①假设四类agent 在各路段上具有定长的平均步行速度,即每个栅格节点上的旅行时间常数;
②环境栅格中弧和顶点有容量限制,容量可以在0到最大允许范围内变化;
③四类agent移动中只允许交叉节点有延迟;
④四类agent移动中不允许返回和绕圈现象;
⑤环境栅格中节点满足先进先出(first in first out,FIFO)规则;
⑥为避免园区内部应急响应阶段过程中发生冲突,定义ERB agent、EE agent 不能同时出现在同一条道路的同位置上,为此将所有路网节点的容量与ERB agent和EE agent的数量设定为同一数值;
⑦为避免园区内外协同应急响应阶段过程中发生冲突,定义ERBL agent、EROE agent的道路不能发生重叠。
2.2.3 化工园区应急响应两阶段双向路径优化数学模型
(1)园区内部应急响应阶段双向路径优化模型 园区内部应急响应阶段的双向移动过程为ERB agent由消防站点移动至事故发生点,EE agent由事故发生点移动至应急避难点。由于应急响应内在的时效性与弱经济性特点,决定园区双向应急救援疏散中的ERB agent、EE agent 必须在尽可能短的时间内完成双向移动。为此,园区双向应急救援疏散路径规划的最终目标是双向移动的agent 不发生冲突且具有最短移动路径。
假设化工园区共划分为个栅格节点。定义化工园区事故发生点在栅格节点,应急避难点在栅格节点,消防站点在栅格节点。那么,园区双向应急救援疏散路径规划问题就转变为求解EE agent 从点移动至点,ERB agent 从点移动至点的双向异质流最短路径。由于栅格化建模过程中,已将道路等级、道路畅通性等因素考虑进去,因此在求解最短路径时,只需要考虑移动权值这一参数。引入“路径当量长度”概念,移动agent 在某两个栅格节点之间的当量移动距离。由于道路的可用性受到危险化学品事故的影响,引入园区事故后果对路径网格的影响状态值参数“”来衡量道路事故状态的权重。园区内部应急响应阶段,EE agent和ERB agent双向路径最短路线的求解公式如式(1)、式(2)所示。
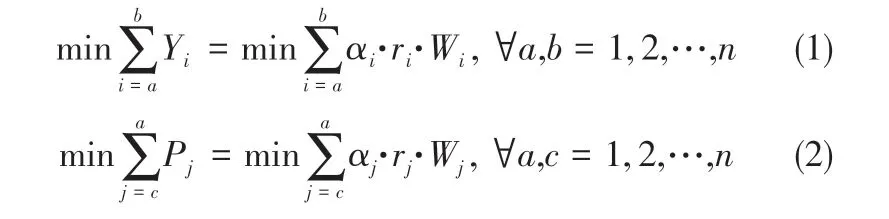
式中,Y为EE agent 所在路径的当量长度;W为EE agent 所在路径网格的实际长度;α为EE agent 在路径网格时最优移动方向的移动权值;r为园区事故后果对路径网格的影响状态值;P为ERB agent 所在路径网格的当量长度;W为ERB agent所在路径网格的实际长度;α为ERB agent在路径网格时最优移动方向的移动权值;r为园区事故后果对路径网格的影响状态值;为EE agent的起点,ERB agent 的终点,即事故发生点;为EE agent 的终点,即应急避难点;为ERB agent 的起点,即消防站点。
(2)园区内外协同应急响应阶段双向路径优化模型 园区内外协同应急响应阶段的双向移动过程为EROE agent 由园区入口移动至事故发生点,ERBL agent由事故发生点撤离至园区出口。在此阶段的双向应急救援入园及撤离过程中,要求EROE agent 必须在尽可能短的时间内到达事故发生点,且不与ERBL agent 移动道路发生冲突。为此,在园区内外协同应急响应的双向应急救援入园及撤离的路径规划的最终目标是找到距离最短,同时所有路径不发生重叠的移动路径。
与园区内部应急响应阶段建模相同,定义化工园区事故发生点在栅格节点,园区出口在栅格节点,园区入口在栅格节点。园区内外协同应急响应阶段双向应急救援入园及撤离路径规划问题就转变为求解EROE agent从点移动至点,ERBL agent从点移动至点的双向不重叠的最短路径。园区内外协同应急响应阶段,EROE agent和ERBL agent双向路径最短路线的求解公式如式(3)、式(4)所示。
式中,M为EROE agent 所在路径网格的当量长度;U为EROE agent 所在路径网格的实际长度;Q为ERBL agent 所在路径网格的当量长度;K为ERBL agent 所在路径网格的实际长度;为ERBL agent 的 起 点,EROE agent 的 终 点;为ERBL agent 的终点,园区出口;为EROE agent 的起点,园区入口。
其中,园区事故后果对路径的影响状态投射到EE agent上,为人员的脆弱性,即园区事故后果对路径网格的影响状态值等于个体死亡概率值,则可应用个体死亡概率方程定量计算风险阻抗的大小。不同事故类型下个体死亡概率方程如表2所示。

表2 个体死亡概率方程[32]
其中,为火灾热辐射强度,W/m;为静态峰值压力,Pa;为热辐射累计暴露计量,μL/L;为有毒气体暴露剂量,μL/L;C为毒物浓度,μL/L;为暴露时间,s;、为事故类型系数;为毒物毒负荷系数,取值参考表3。
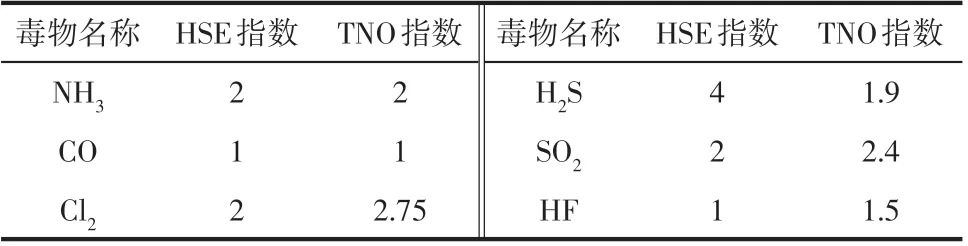
表3 几种常见有毒气体毒负荷指数[32]
结合事故后果模型,可以得出不同事故类型下、、、等的值。以池火灾事故场景为例,基于热辐射累计暴露剂量公式,可以计算得到栅格处个体死亡概率方程剂量的值,如式(5)所示。

式中,为火灾热辐射强度,W/m;为人员暴露在栅格的时间,s。
将的值代入热辐射个体死亡概率方程,即可计算风险阻抗。此外,在实际计算个体死亡概率值,即危化品事故后果场景对栅格的影响状态值r时,可参考DNV PHAST 8.21 中给出的脆弱性概率及其对应的累积暴露剂量,给定池火灾场景下的园区事故后果对路径网格的影响状态值,如图4所示。
结合图4,池火灾场景下的园区事故后果对路径网格的影响状态值如式(6)所示。
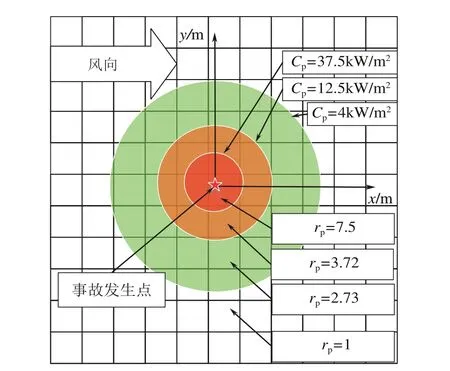
图4 池火灾场景下的园区事故后果对路径的影响状态取值示意图

式中,为池火灾场景下的园区事故后果对路径网格的影响状态值;为路径网格的热辐射强度值,kW/m。
2.3 动态环境中的智能避障模型
2.3.1 园区内部应急响应阶段双向路径智能避障模型
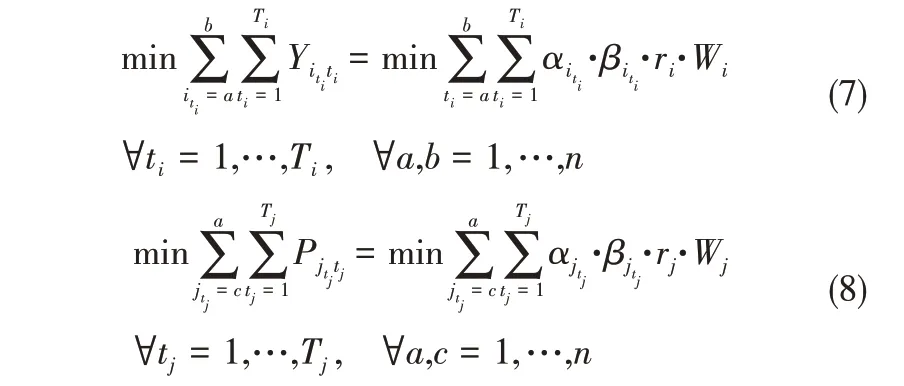
为实现园区内部应急响应阶段ERB agent 与EE agent 双向路径的无冲突规划与ERB agent 的主动避让功能,在模型中引入时间步长参数来构建ERB agent的智能避障模型。结合2.1节动态栅格法中设定的环境地图数据更新频率为移动agent 走一步更新一次。那么,在agent 虚拟前进并预测出下一节点的最优移动方向发生冲突时,根据2.2.1 节的移动属性,定义EE agent选择最优移动方向,且路径节点的畅通性修正系数等于最优移动方向的移动权值,ERB agent 在最优移动方向的畅通性修正系数为∞,即前方栅格为1 状态,需根据目标函数重新规划下一步的移动方向。由此,引入时间步长参数的园区内部应急响应阶段EE agent 和ERB agent双向路径规划模型如式(7)、式(8)所示。
目标函数
ERB agent的智能避障规则如式(9)。

式中,Y为EE agent所在路径网格的当量长度;P为ERB agent所在路径网格的当量长度;t为EE agent移动的第t步;t为ERB agent移动的第t步;i为EE agent 第t步的路径网格;j为ERB agent 第t步的路径网格;α为EE agent 在t步时最优移动方向的移动权值;β为EE agent所在路径i的畅通性修正系数;α为EE agent 在t步时最优移动方向的移动权值;β为ERB agent 所在路径j的畅通性修正系数。
2.3.2 园区内外协同应急响应阶段双向路径智能避障模型
为实现园区内外协同应急响应阶段EROE agent 与ERBL agent 双向路径的无重叠规划,在模型中引入时间步长参数来构建EROE agent的智能避障模型。结合2.1 节动态栅格法中设定的环境地图数据更新频率为移动agent 走一步更新一次。那么,在agent 虚拟前进并预测出下一节点的最优移动方向发生冲突时,根据2.2.1 节的移动属性,定义EROE agent 选择最优移动方向,且路径节点的畅通性修正系数等于最优移动方向的移动权值,ERBL agent 在EROE agent 移动过的栅格上的畅通性修正系数均为∞,即栅格为1 状态,需根据目标函数重新规划下一步的移动方向。由此,引入时间步长参数的园区内外协同应急响应阶段EROE agent 和ERBL agent 双向路径规划模型如式(10)、式(11)所示。
目标函数

ERBL agent的智能避障规则如式(12)。

式中,M为EROE agent 所在路径网格的当量长度;Q为ERBL agent 所在路径网格的当量长度;i为EROE agent 第t步的路径网格;j为ERBL agent第t步的路径网格;α为EROE agent在t步时最优移动方向的移动权值;β为ERBL agent所在路径i的畅通性修正系数;α为EROE agent在t步时最优移动方向的移动权值;β为ERBL agent所在路径j的畅通性修正系数。
应用Dijkstra 算法对化工园区应急响应两阶段的双向路径规划模型进行求解,求解步骤如图5所示。
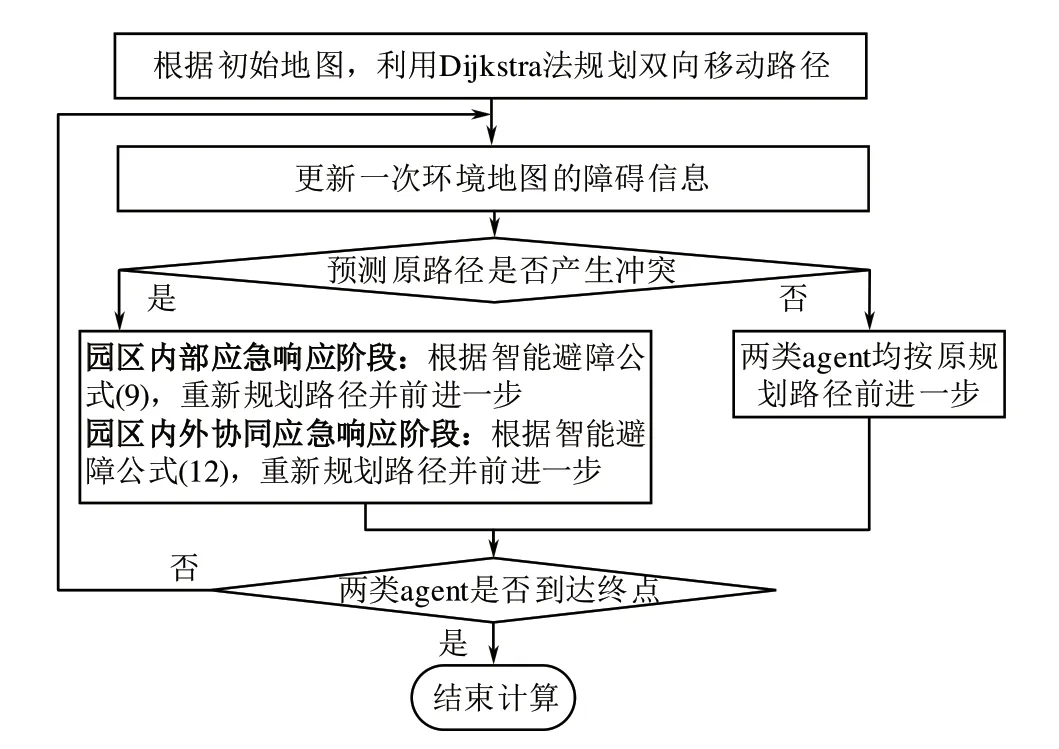
图5 化工园区应急响应两阶段双向路径求解流程
3 仿真验证
3.1 初始化化工园区栅格环境及各agent参数设置
以某化工园区为例,进行仿真验证。化工园区发生重大危险化学品事故时,需要进行应急救援与疏散。根据化工园区GIS 地图内建筑物、设备、设施等信息,设置障碍物的大小、位置与外接矩形。建立起37×26的化工园区栅格地图,总节点数=962,所建成初始化环境栅格地图及各类agent起点、终点设置如图6所示。设定各节点可容纳100个agent,agent单位步长为1个节点。

图6 某化工园区初始化栅格地图
3.2 路径优化结果与分析
首先,运用DNV PHAST 8.21 计算池火灾事故后果,并将栅格地图的热辐射强度值导入式(6),计算道路栅格的池火灾场景下的园区事故后果对路径网格的影响状态值。
其次,将仿真案例中的其他相关参数代入化工园区应急响应两阶段双向路径智能避障模型公式(7)~式(12)中。其中,α、α移动权值取值参考表1;β、β畅通性修正系数取值参考式(9)、式(12);W、W路径网格实际长度为agent 一个步长所移动的长度,即一个栅格的长度。
最后,运用Dijkstra 算法对化工园区应急响应两阶段双向路径规划智能避障模型进行计算求解。在园区内部应急响应阶段,使用绿色与红色虚线线条表示EE agent 与ERB agent 的移动轨迹;在园区内外协同应急响应阶段,使用黄色与绿色实线线条表示EROE agent 与ERBL agent 的移动轨迹,移动方向的最前端为agent 在当前步长时所处的路径节点。
3.2.1 园区内部应急响应阶段双向路径规划
(1)池火灾事故后果计算 根据化工园区安全评价报告,在DNV PHAST 8.21 中输入的池火灾事故参数为:危险物质设为甲苯;体积设为1200m;温度设为25℃;场景设为灾难性破裂;风速设为3m/s;风向设为NE;离地高度设为2m;设备设为常压储罐。
利用DNV PHAST 8.21 计算的池火灾事故热辐射强度值,结合式(6),计算化工园区中路径网格在池火灾事故场景下的事故影响状态值,如图7所示。
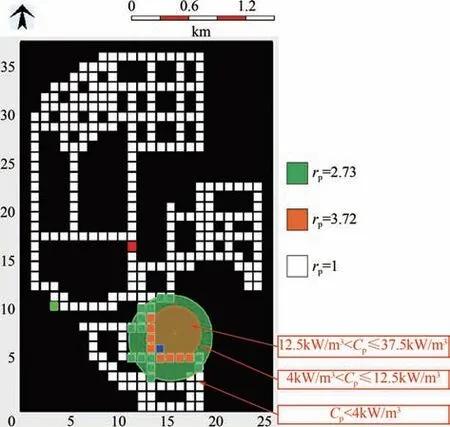
图7 池火灾事故场景的化工园区路径网格事故影响状态图
(2)考虑无智能避障约束情况 在无智能避障约束的情况下,化工园区ERB agent 与EE agent双向agent 为可兼容状态且优先级相同。对其移动路径进行同时规划,在不考虑ERB agent 的智能避障规则的场景下,在进行第4步路径规划时,化工园区ERB agent、EE agent均选择图8(a)中的最优移动方向,即当t=t=4 时,==662,两条移动路径在此位置处发生冲突,其移动轨迹如图8(b)所示。
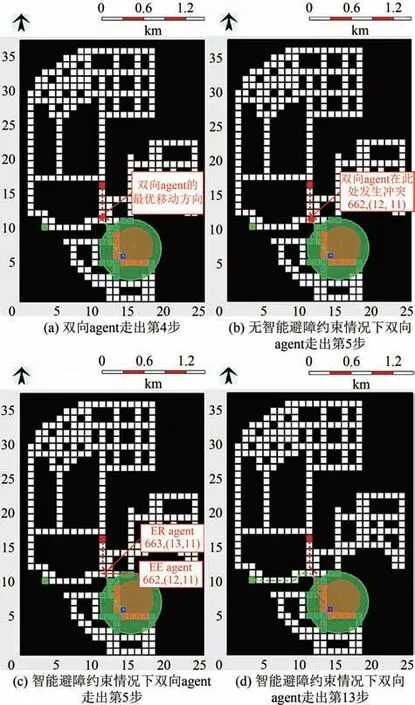
图8 智能避障约束情况下园区内部应急响应阶段双向路径
(3)考虑智能避障约束情况 为避免ERB agent与EE agent 移动路径在化工园区路网中发生冲突,导致道路拥堵,影响应急响应效果,在模型中代入式(9)所示ERB agent 智能避障规则这一条件。这种场景下,在第4步移动结束,预测到t=t=5时,==662。判定按照原路径移动时即将发生冲突,需根据ERB agent的智能避障规则,重新规划路径。将第4 步时ERB Agent 与EE Agent 的位置信息代入式(7)~式(9)得,β=1.414,β=∞。此时ERB agent主动避让EE agent,由EE agent 移动到最优移动方向,即662 节点。而ERB agent 根据数学模型重新规划下一步移动路径,为663 节点,如图8(c)中标注所示。根据图5化工园区应急响应两阶段双向路径求解流程,双向agent 继续向前移动,最终完成园区内部应急响应阶段的双向应急救援与应急疏散路径规划,其移动轨迹如图8(d)所示。其中,ERB agent从消防站点到事故发生点最短路径如图8(d)中红色虚线轨迹所示,共需10步。EE agent从事故发生点到应急避难点最短路径如图8(d)中绿色虚线轨迹所示,共需13 步。两条路径均为最优路径。
3.3.2 园区内外协同应急响应阶段双向路径规划
根据图7进行化工园区内外协同应急响应阶段双向路径规划,其双向路径为EROE agent 由园区入口移动至事故发生点,ERBL agent由事故发生点撤离至园区出口,根据图5化工园区应急响应两阶段双向路径求解流程进行求解,其移动轨迹如图9所示。

图9 智能避障约束情况下园区内外协同应急响应阶段双向路径
EROE agent 从园区入口到事故发生点最短路径如图9 中黄色实线轨迹所示,共需要6 步。ERBL agent 从事故发生点到园区出口最短路径如图9中红色实线轨迹所示,共需要13步。两条路径均为最优路径,且在整个路径规划过程中不存在移动路径重叠问题。
结合3.3 节仿真验证结果,对比引用中提及的单向应急救援、应急疏散路径规划模型与化工园区应急响应中应急救援与应急疏散双向路径规划模型,主要区别在于:传统的单向应急救援和应急疏散模型,其优化目标通常是移动路径最短、行程时间最短、运输成本最低等应急单向路径时效性目标,无法实现动态避障,适用于长距离应急资源调配和企业内应急疏散规划;基于智能避障的化工园区双向应急救援与疏散模型,其优化目标为双向移动路径最短,可以提供双向同时规划和应急响应分阶段规划,能够实现动态避障,适用于区域应急响应及重大事故应急响应路径规划。
4 结论
(1)提出了一种考虑智能避障的化工园区应急响应阶段应急救援与应急疏散双向路径优化方法,重点研究化工园区应急响应过程的园区内部应急响应和园区内外协同应急响应两个阶段,分别对园区内部应急响应阶段的应急救援与应急疏散双向路径以及园区内外协同应急响应阶段的应急救援车辆入园与撤离双向路径进行规划。采用动态栅格法对化工园区栅格环境进行实时更新,应用Dijkstra 算法对化工园区应急响应中的双向应急救援与应急疏散路径进行规划,实现智能避障前提下的各阶段双向移动路径最短。
(2)结合化工园区应急响应两个阶段的响应特性,建立考虑智能避障的化工园区应急救援与应急疏散双向路径规划模型。引入道路畅通性修正系数与时间步长参数,定量化表征动态障碍与固定障碍的动态智能避障规则。园区内部应急响应阶段中的ERB和EE双向移动agent的移动路径为互不兼容的动态障碍,园区内外协同应急响应阶段中的EROE和ERBL 双向移动agent 的移动路径为互不兼容的固定障碍。
(3)在某个化工园区中验证了所提出的路径规划方法,仿真结果表明,在园区内部和内外协同应急响应阶段的双向路径都是最短路径,且在按照原规划路径行走至下一步即将发生冲突时能够成功避障。所提出的化工园区应急响应两阶段应急救援与应急疏散双向路径规划方法可以应用于很多实际的应急响应决策中。