基于无人机倾斜摄影技术的单木参数提取及胸径模型构建
2022-02-11刘柏良李双双
王 越 何 诚 刘柏良 李双双
(1. 南京森林警察学院,江苏 南京 210023;2. 艾欧史密斯(中国)环境电器有限公司,江苏 南京 211200)
林业资源调查评估中,调查标准地内的样木高度、冠幅及胸径等立木因子是最基本的工作[1]。传统林业资源调查主要以地面抽样调查的方式进行,在样地的实际设置中,往往会根据森林内林木的大小等因素进行调整。但是样地面积的增加会造成调查工作量大的增加,并且设置的样地面积越大,越难得到符合要求的区域[2-4]。样地内,工作人员使用胸径尺、罗盘仪、测高器和皮尺等工具获取森林的面积、树高、胸径、蓄积量、林龄等信息,林木的胸径是林地资产评估的重要参数[5],获取精准的胸径数据是计算森林蓄积量和生物量的关键。但是现阶段对于胸径的测量仍处于实测考察测量和人员评估的阶段,如天气恶劣或人员无法涉足的区域,给测量评估带来了很大的难度。这样的调查方法不但工作效率低下、操作方法繁琐,且获取的数据需要进行大量的计算,浪费了人力物力,不符合当今社会对精准林业的要求[6-7]。随着科学技术的发展,一些高精度的测量设备在森林资源调查中应用也逐步增多,如三维激光扫描仪、全站仪、GPS 数据采集设备、GIS 系统、数据分析系统以及地图制作系统,此类设备在林业中的应用虽大大提升了林业信息提取精度,但除了需要较高的资金投入外,也具有一定的局限性,如难以获取大面幅的林业信息以及人员难以到达的区域的林分信息[8-9]。
近年来,无人机倾斜摄影技术逐渐在林业、草原、采矿等测量中应用,该方法通过在无人机上搭载五镜头相机;同时从垂直、倾斜等多个角度采集同一目标的影像,获得地面目标更为完整准确的信息,突破了传统无人机只能进行正摄影的局限[10-12]。因此从多个角度进行拍摄的影像数据成果也丰富多样,主要包括垂直影像、倾斜影像、点云、实景三维模型、数字正射影像(DOM)、数字表面模型(DSM),同时在此基础上衍生出数字高程模型(DEM)、数字线划地图(DLG)等成果[13-14]。刘文萍等[15]利用无人机正摄影图像对数目胸径进行预测;蒲莹等[16]利用激光雷达技术对立木树高及相关树冠因子进行测定;苏迪等[17]基于无人机航测数据的森林郁闭度和蓄积量进行了估测;Kachamba 等[18]利用无人机提取的3D 数据对林地的生物量进行了估算,证明了无人机三维数据在生物量估算中的可行性;Panagiotidis 等[19]利用无人机搭载单木相机提取的高清图像对树冠和树高进行了估测,并验证了其精度; Gatziolis等[20]利用无人机摄影测量技术获取小群树木的三维模型,评估了几个无人机平台及图像处理算法的准确性。倾斜摄影可以从多个方向观察地物,弥补正射影像不足,而且数据量小,相较激光雷达庞大的点云三维数据,倾斜摄影技术获取的影像数据要小得多,且成本低,易于操作。利用无人机倾斜摄影技术对森林资源调查进行的研究,主要是林区的宏观调查研究,如森林蓄积量、森林平均高度、森林郁闭度等,对单独立木因子信息提取的精度及胸径反演模型的建立及模型精度评价的研究较少。
本研究旨在利用无人机搭载五目高清摄像头对研究区域进行拍照扫描,获取研究区域的三维模型,从而获取任意立木的参数,以传统高精度地面测量设备所测样木因子为真值,对无人机倾斜摄影技术获取单木因子的精度进行评价,并将提取的单木因子作为变量建立胸径反演模型,并对反演模型的精度进行评价。研究的结果可为森林资源管理、生态保护、公安执法提供参考,极大的促进森林资源调查向自动化方向发展,促进森林资源的动态监测,对当前国家合理开展生态环境保护工作具有重要的现实意义。
1 材料与方法
1.1 数据采集
试验区(如图1 所示)位于江苏省南京市栖霞区南京森林警察学院,地处东经118°54′51″,北纬32°06′45″,总面积约45 m2,海拔20~50 m,亚热带季风气候。本研究共选取了校园内道路两侧的4 块梧桐树种植区作为研究对象,每块样地的大小为12 m × 140 m,共60 组有效数据,林龄50 a,行距约5 m,周围无遮挡,地面手段可以精准获取单木的信息。地面手段测量到的单木参数作为测量真值,用于检测无人机获取数据的精度。树高、冠幅采用南方NTS-3401 全站仪进行测量,胸径采用围尺进行测量,在距离树木根茎1.3 m 除测量样木胸径,记录结果。

图1 实验地三维立体图Fig. 1 Experimental 3D stereogram
使用全站仪测量样本树木的树高,并将该数据作为测量真值,用于验证无人机倾斜摄影技术获取森林单木参数的精度,测量方法见图2。本研究使用南方NTS–3401 全站仪进行树高测量,该设备具有3R 级可见激光,无棱镜精度为3 mm +2 × 10-6·D,测量的范围在550 m 以内,理想测距范围为300 m 以内。
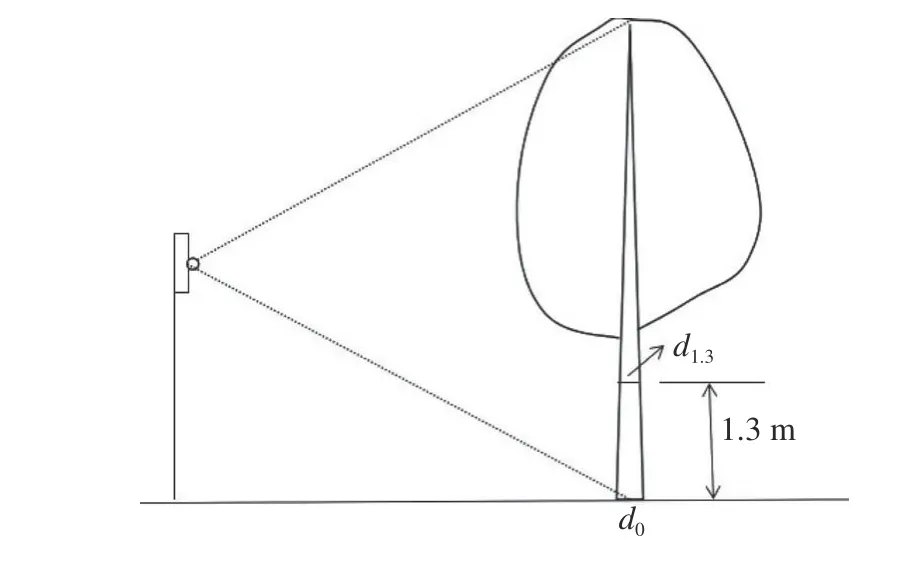
图2 全站仪测量树高示意Fig. 2 Total station to obtain the tree height diagram
在东、南、西、北4 个方向树冠投影处立棱镜即可测量这些点的平面坐标,再根据坐标数据计算出东西、南北的宽度,取平均值,即为冠幅(图3)。
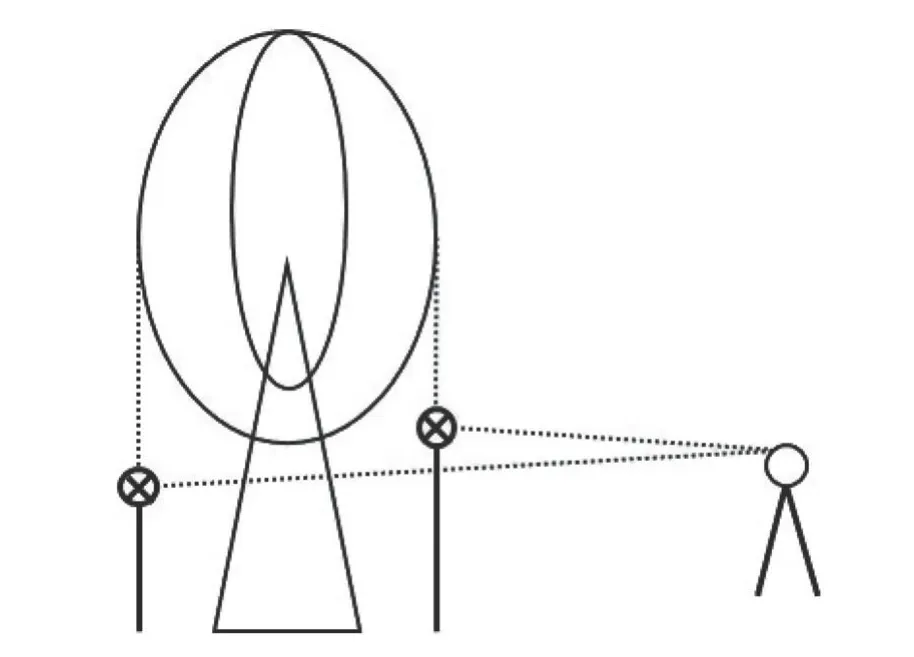
图3 全站仪测量冠幅示意Fig. 3 Total station to obtain the crown width diagram
1.2 航摄系统设置
采用的航摄系统是深圳市科卫泰实业发展有限公司自主研制的KWT–X6L–15 无人机飞行系统,见图4。它是由KWTX6L15 型多旋翼无人机飞行平台、飞行控制系统、CCD 数码相机组成的主体摄像系统,并配有地面站、远程无线通讯装置、地面数据处理系统等辅助设施。
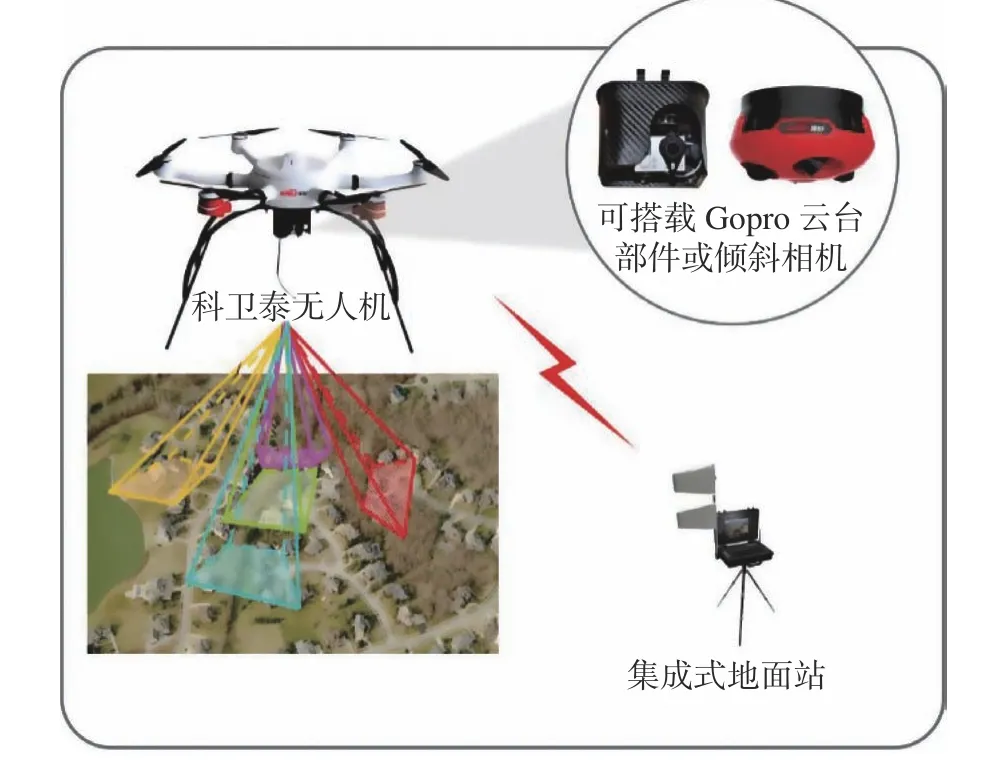
图4 无人机3D 摄影技术示意Fig. 4 Schematic diagram of 3D photography of UAV
研究区域的数据采集时间为2020 年6 月1 日中午,天气晴朗、风速1~2 级、PM2.5优,选择此时间的目的是尽量减少光照、风速等天气因素对航测效果的影响,并且正午时分可以保证树冠的阴影面积小,减少后期冠幅提取时的影响。因为当飞行高度大于50 m 或者飞行速度大于3 m/s时,建模效果不理想,有部分影像看不清楚。因此本次飞行预设的相对高度为35 m,飞行速度为2.5 m/s,相机垂直于地面,航向重叠率85%,旁向重叠率为75%,共布置了77 条航线(横向38条,纵向39 条)。本研究区域共采集2 400 余张无人机遥感影像。
1.3 基于三维遥感数据提取单木参数
1.3.1 获取树高数据
使用Context Capture Center 软件对无人机搭载五目相机所获取的航拍数据进行三维建模。完成三维模型后,使用Acute3D Viewer 软件可以在获取的三维立体遥感数据上,提取任意样木树顶到地面间的距离即为树高(图5)。
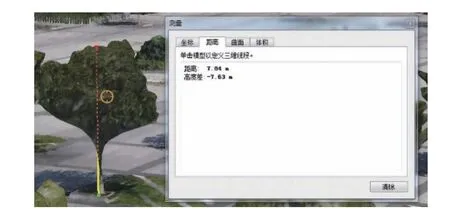
图5 无人机3D 摄影提取树高技术Fig. 5 Extracting tree height by UAV 3D photography
1.3.2 获取冠幅数据
树冠的提取方法选用目视解译法,依据目标地物的色调、亮度、阴影、纹理和结构等方面的特征,以无人机拍摄的地物图像为底图,手动勾绘出树冠的边缘,边缘形成的闭合面积即为树冠的冠幅面积,然后量取东西、南北走向宽度的平均值即为冠幅(图6)。
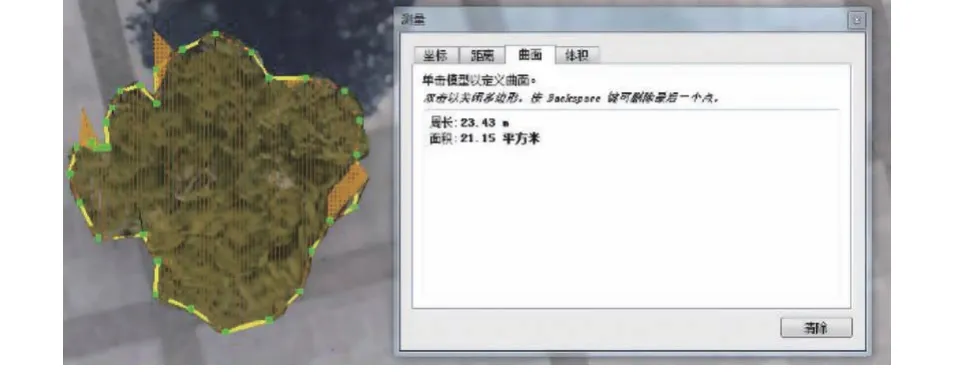
图6 无人机3D 摄影获取冠幅技术Fig. 6 Crown amplitude extraction by UAV 3D photography
1.4 构建胸径模型
林木的胸径是林地资产评估的重要参数,自动获取胸径数据是准确高效计算森林蓄积量和生物量的关键。无人机获取林木的树高和冠幅相对容易,而获取胸径具则有一定的局限性。因此,本研究拟以树高(H)、冠幅(CW)2 个参数为自变量,胸径(DBH)为因变量,构建胸径模型,分别构建树高–胸径模型、冠幅–胸径模型以及树高&冠幅–胸径模型。试验共获取60 组样木的冠幅、树高及胸径数据,将这些数据按4∶1 随机分成2 组,80% 的数据用于建立胸径反演模型,20%的数据用于验证模型精度。常用的胸径反演模型见表1。
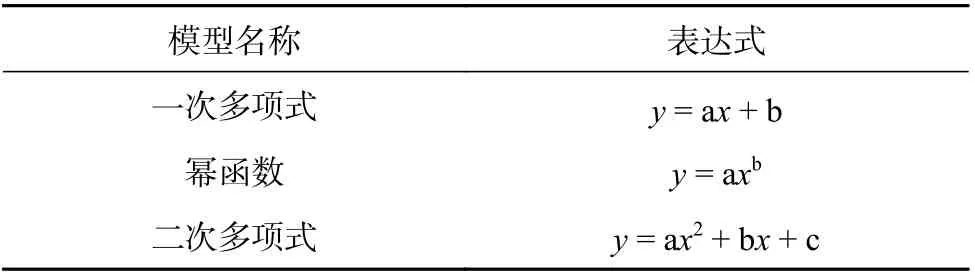
表1 胸径建模常用模型Table 1 Commonly used models for diameter inversion
1.5 精度评价
1.5.1 测量精度评价
单木树高的测量精度采用绝对误差(Δ)和相对误差(ER)进行评价。将地面测量获取的60 组树高、冠幅值作为真值,与无人机获取的60 组树高、冠幅精度进行评价,无人机倾斜摄影技术提取的树高、冠幅的绝对误差、相对误差计算方法见式(1)~(2),相对误差满足B 类森林资源树高因子误差值(10%)规定[1]即可。

式中:VG为无人机倾斜影像提取的树高、冠幅数据,VT为全站仪测量的树高、冠幅数据真值。
单木冠幅的提取精度根据全站仪测量的单木树冠冠幅与投影面积大小与目视解译法提取的树冠冠幅和投影面积大小进行精度评价,计算方法见式(3):

式中:P参数表示树冠冠幅和树冠投影面积提取精度,S实测表示全站仪测量的树冠面积和投影面积大小,S提取表示无人机提取的树冠冠幅和投影面积大小。
1.5.2 模型精度评价
将48 组随机抽取的数据进行胸径模型拟合,采用决定系数(R2)和残差平方和(RSS)来验证模型的精度,其中R2越大,RSS 的值越小,代表拟合程度越好;在模型拟合之后,利用剩余的12 组数据用于模型独立性检验,采用决定系数(R2)、均方根误差(RMSE)和相对误差(ER)3 个指标进行评价,其中R2越大,RMSE 越小,ER的波动范围越小,代表模型预估的精度越高。
2 结果与分析
2.1 单木参数提取精度评价
2.1.1 无人机提取树高精度分析
无人机三维立体图上获取的树高值与全站仪实测树高值的分布见图7。提取的树高值与实际测量的树高值分布趋势大体一致,差异性较小,精度较为准确。通过三维数据提取的最大树高值为23.89 m,最小树高值为15.17 m,全站仪测量的最大树高值为23.56 m,最小值为14.89 m。基于三维数据提取的60 株样木的树高值的绝对误差范围为0.21~1.66 m,相对误差范围为0.53%~5.39%,平均误差率为2.07%,满足B 类森林资源树高因子误差值规定(10%),提取结果良好。

图7 无人机提取的树高值与人工实测值的对比Fig. 7 Comparison and distribution of tree height extracted by UAV and measured manually
2.1.2 无人机提取冠幅精度分析
无人机三维立体图上获取的冠幅值与全站仪实测冠幅值的分布见图8。提取的冠幅值与实际测量的冠幅值分布趋势大体一致,差异性较小,精度较为准确。提取的最大冠幅值为16.75 m,最小冠幅值为7.26 m,全站仪测量的最大冠幅值为16.89 m,最小值为7.42 m。60 株样木的冠幅提取值的绝对误差范围为0.06~0.7 m,相对误差范围为1.3%~8.17%,平均相对误差为3.45%。通过计算可知,提取树冠冠幅的精度为94.6%~99.5%,提取结果良好。
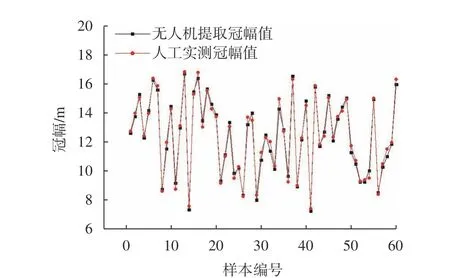
图8 无人机提取的冠幅值与人工实测冠幅值的对比Fig. 8 Comparison and distribution of canopy amplitude extracted by UAV and measured manually
2.2 胸径模型精度评价
2.2.1 树高–胸径模型及精度分析
树高–胸径(H–DBH)模型是将树高(H)作为自变量,胸径(DBH)作为因变量构建模型,各模型的精度分析结果见表2。在模型拟合精度方面,R2均大于0.95,其中R2最高、RSS 最小的模型均是二次多项式模型,一次多项式和幂函数模型的R2相近,而幂函数的RSS 明显小于一次多项式模型的,因此二次多项式模型的模型拟合效果最好,其次是幂函数模型,一次多项式模型拟合效果在这3 个模型中表现略差。在独立性检验方面,R2最大、RMSE 最小、ER最小的模型均是二次多项式模型,幂函数和一次多项式模型的独立性检验指标均相近,因此二次多项式模型的估测效果最优,其次是一次多项式和幂函数模型。综合2 个方面的模型精度评价结果可知,二次多项式树高–胸径模型的模型精度最佳。

表2 树高-胸径各模型精度评价Table 2 Fitting parameters of H-DBH models
2.2.2 冠幅-胸径模型及精度分析
冠幅–胸径(CW–DBH)模型是将冠幅(CW)作为自变量,胸径(DBH)作为因变量构建模型,各模型的精度分析结果见表3。在模型拟合精度方面,R2均大于0.96,其中R2最高、RSS 最小的模型均是二次多项式模型,一次多项式和幂函数模型的R2相近,而幂函数的RSS 明显小于一次多项式模型的,因此二次多项式模型的模型拟合效果最好,其次是幂函数模型,一次多项式模型拟合效果在这3 个模型中表现略差。在独立性检验方面,R2最大、RMSE 最小、ER最小的模型均是二次多项式模型,一次多项式模型的3 个指标均优于幂函数,因此二次多项式模型的估测效果最优,其次是一次多项式,幂函数模型的预估能力在这3 个模型中表现略差。综合两个方面的模型精度评价结果可知,二次多项式树高–胸径模型的模型精度最佳。

表3 冠幅-胸径各模型拟合参数Table 3 Fitting parameters of crown width-diameter models
2.2.3 树高&冠幅-胸径模型及精度分析
树高&冠幅–胸径(H&CW–DBH)模型是将树高(H)、冠幅(CW)为自变量,胸径(DBH)作为因变量构建模型,各模型的精度分析结果见表4。在模型拟合精度方面,R2均大于0.97,其中R2最高、RSS 最小的模型均是二次多项式模型,一次多项式模型的2 个指标均次于二次多项式模型,因此二次多项式模型的模型拟合效果最好,其次是一次多项式模型。在独立性检验方面,R2最大、RMSE 最小、ER最小的模型均是二次多项式模型,一次多项式模型次之,因此二次多项式模型的估测效果最优,其次是一次多项式和幂函数模型。综合2 个方面的模型精度评价结果可知,二次多项式树高–胸径模型的模型精度较佳。

表4 树高&冠幅-胸径各模型拟合参数Table 4 Fitting parameters of each model of CW&H-DBH
2.2.4 各类胸径模型比较
经过上述对比,从上述3 类模型中的选出最优模型,各类型最优模型参数见表5。由表5 可知,H&CW–DBH 的二次多项式模型的拟合效果最高最好,H–DBH 二次多项式模型拟合效果次之,CW–DBH 二次多项式拟合效果相较于前两者略差。在独立性检验方面,H&CW–DBH 的二次多项式模型估测效果最好,但CW–DBH 的估测能力要强于H–DBH 的估测能力,这可能是因为除了模型的拟合程度,还存在模型泛化的问题。综上所述,H&CW–DBH 模型精度最佳。

表5 最优模型比对参数Table 5 Comparison parameters of optimal model
3 结论与讨论
本研究利用无人机倾斜摄影技术获取了冠幅、树高等单木参数,并对这些获取参数进行了精度比对,同时利用这些参数,建立了胸径的反演模型,通过研究得结论如下:
1)无人机倾斜摄影技术只需要利用无人机搭载五目相机在目标区域飞行后,便可获得该区域的三维立体影像数据,利用相关软件对飞行数据进行建模,便可在三维影像中进行样木参数的提取,此技术操作简单、成本较低,提高外业效率的同时,还能在飞行过程中进行地理空间的实景三维模型的重建,获取被测区域全方位的空间信息。
2)无人机倾斜摄影技术获取的立木参数与人工实测立木参数分布趋势大体一致,计算得到的绝对误差为0.21~1.66 m,相对误差波动范围为0.53%~5.39%,平均相对误差为2.07%,满足国家规定的B 类森林资源树高因子的误差率小于10%的规定,树高提取结果良好;冠幅的绝对误差为0.06~0.7 m,相对误差波动范围为1.3%~8.17%,平均相对误差为3.45%,提取冠幅精度为94.6%~99.5%,冠幅提取结果良好。因此,无人机获取单木因子的精度较高。
3)试验所得的拟合模型中,H&CW–DBH 的二元胸径反演模型效果是最好的,此模型拟合的决定系数高达0.983,残差平方和为35.62,拟合度较好;从模型的预估能力来看,其决定系数高达0.9,均方根误差为0.83,相对误差为2.21%。满足国家规定的A 类森林资源调查胸径因子误差率小于5%的要求[1],精准度高。说明无人机获取样木参数构建胸径反演模型的方法精度高,具有较高的实用性和推广性。
利用全站仪测量树高、冠幅均需要至少2 个外业人员,1 个人负责测量,1 个负责固定控制点,并且要在样地内进行每木调查,调查方式繁琐、数据处理复杂,并且在看不到边界或者路况不佳的山区,此方法有很大局限性。无人机倾斜摄影技术可以多个角度获取地物的信息,快速获取研究区域的影像并导入相关软件,即可获取研究区域的三维立体图,再对所需数据进行量取,并且无人机价格相对低廉、大幅提高作业效率、飞行高度低等优势可深入林区进行拍摄,很大程度上减少外业的工作量,降低了外业难度,在森林信息资源获取中具有极高的应用价值。但利用无人机进行航空测量仍存在一些缺点,如续航能力差,不适合大范围的航摄;受森林林分、郁闭度的影响,精度会出现不同的差异,这些还有待于考究,且本研究对于无人机立体摄影中提取的胸径的方法仅限人工纯林,对于多种树种混交的林区是否可用,还需要进一步探索。
