一种轻小型高通量机载卫星通信系统设计
2022-02-06张令军李辰飞
张令军,李辰飞
天津讯联科技有限公司
我国高通量通信卫星已成功发射。为满足无人机整机重量轻的需求,本文设计一种轻小型高通量机载卫星通信系统。该系统严格按照国家军用标准进行正向设计和研制,结构紧凑、重量轻、伺服性能良好,可实时传输已打包的无人机多源传感器数据。无人机安装该系统后,在高动态飞行中能与卫星保持连续的高通量通信。
随着无人机技术不断取得突破,无人机性能有了显著提升,机载任务载荷类型及数量不断增加,无人机机载端传输的数据量不断增大。Ku波段机载卫通设备的数据传输速率为2 ~4Mb/s,已经不能满足高清摄像机、合成孔径雷达(SAR)等任务载荷数据的实时传输需求。随着“亚太”6D高通量卫星的发射成功,基于高通量卫星的机载卫通系统应运而生,这种系统是未来卫星通信移动终端发展的技术方向。
系统功能与组成
本文设计一种高通量轻小型机载卫通系统,该系统能够根据自身安装的惯导系统及全球定位系统(GPS)提供的初始数据,控制天线指向卫星,陀螺增稳平台能确保天线始终指向目标卫星,同时在无人机飞行过程中,隔离无人机的扰动。该型机载卫通系统主要功能如下所述。
一是接收地面卫通终端传输的无人机控制信息,实现上行信息(遥控信息)传输。
二是将打包的任务载荷数据和无人机飞行状态信息回传地面卫通终端,实现下行信息(遥测信息)传输。
三是具有上电自检及掉电保护功能,掉电后能够保存卫通伺服系统的参数,重新上电后按照原参数工作。
四是具备初始自动对准和失锁后再对准功能。
五是具备极化自动跟踪功能。
本系统由天馈单元、伺服单元和稳定跟踪单元三部分组成。天馈单元包括天线与馈源、功率放大器(BUC)、低噪声放大器(LNB);伺服单元包括方位电机与传动机构、俯仰电机与传动机构、极化电机与传动机构;稳定跟踪单元包括主控模块、信标接收机、滑环、旋转关节、基于GPS/北斗卫星导航系统的定位模块以及微型惯性导航模块等设备。
系统特点
1.尺寸小、重量轻、功耗低
该产品适用于无人机,选用最优性能的小尺寸天馈系统。结构件由铝合金制造而成。轴承选用低惯量、低摩擦因子的轻型轴承。齿轮采用轮辐式镂空结构设计,减轻了系统重量。特殊零件由碳纤维复合材料制成。电机是直流无刷力矩电机,具有尺寸小、重量轻、功耗低等优点。驱动器尺寸小、功耗低,集成在主控板上。电源模块内部的功率变换器全部实现模块化,具有尺寸小、重量轻、效率高、可靠性高等特点。
2.集成多源传感器数据融合与处理技术
多源传感器数据融合处理技术是指一种可将多种传感器获取的信息进行融合和优化处理,最终实现信息优化并提高数据精度的技术。本系统集成了高精度增量式编码器、信标接收机、微型惯性导航模块、基于GPS/北斗卫星导航系统的定位模块等设备,系统的独立工作和闭环跟踪不依赖无人机机载全球定位系统和机载惯导系统的数据。
3.拥有多种跟踪方式
本系统的工作特点是,全天候、全区域、任意环境下必须准确地对准目标卫星,才能保证卫星通信链路有效地传输信息。因此,本系统须要具有多种跟踪方式。目前常用的跟踪方式包括程序跟踪、信标跟踪、单脉冲跟踪。程序跟踪是在没有卫星信号或者信号不稳的情况下,系统根据目标卫星的位置信息对卫星进行跟踪。信标跟踪是在目标卫星附近有多颗卫星的情况下,系统使用的跟踪方式,以防止锁定邻近卫星。单脉冲跟踪是系统在跟踪没有信标信号的卫星时所使用的跟踪方式。
系统硬件设计
本系统以嵌入式系统(ARM)为核心,选取STM32F407微处理器作为主控芯片;驱动机构包括基于ARM的直流伺服电机;高精度增量式编码器作为位置和速度反馈元件,实现电机的闭环控制。同时,本系统利用微型惯性导航模块构建增稳平台,结合全球定位系统和信标接收机输出的数据,完成机载卫通天线的初始寻星和稳定跟踪。
空间姿态解算
机载卫星通信系统正常工作的前提是,天线始终准确地指向目标卫星,保证信号在有效波束范围内。软件的核心算法应完成两部分工作,首先数字引导将天线引导到目标卫星波束范围内;其次,根据信标机输出的自动增益控制(AGC)值,系统利用软件算法,完成机载天线的动态对星跟踪。该系统采用基于GPS/北斗卫星导航系统的高精度定位模块,根据卫星的位置信息和天线的经纬度信息,得到卫星和天线的经度差值Ф,天线的纬度θ。经空间姿态解算,本文得到天线的方位指向角度A、俯仰指向角度E、极化指向角度P,计算公式如下。
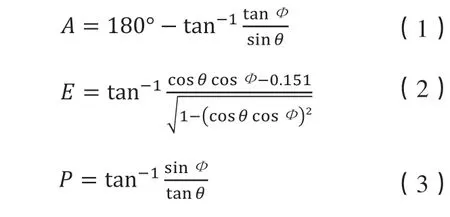
(1)(2)(3)式可计算机载高通量卫通天线在地理坐标系中的指向角度。此坐标系下的指向角度不能直接给控制器,须要由坐标变换解算出载体坐标系下的指向角度,坐标变换矩阵如下所述。
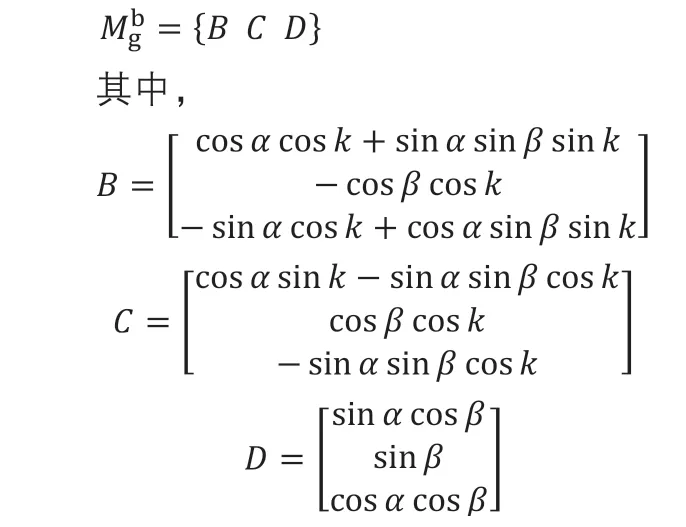
指向角度通过上述坐标转换,得到载体坐标系下的方位指向角度、俯仰指向角度和极化指向角度。控制单元根据指向角度值,控制执行机构进行三个轴向位置的转动,使天线对准目标卫星。
伺服控制系统包括初始化、对星、锁定、待机、停止5种工作状态。系统上电后,伺服控制系统的软件将自动运行,当初始化成功且惯导模块进入导航解算后,机载卫通天线开始寻星,锁定卫星后进入自动稳定跟踪状态,同时从外部接口接受各种指令、数据,并对指令和数据进行相应的处理。
实测数据
为充分验证工程样机的性能,本文对工程样机进行摇摆台性能测试及环境适应性试验。6自由度摇摆台使用模拟机载环境,设置参数为振幅8°、周期3s,目标卫星选取“中星”10、“中星”12、“亚洲”9、“亚太”6D卫星。摇摆台试验测试了初始对星时间以及失锁后重新捕获目标卫星的时间,表1为实测数据。

表1 基于不同目标卫星,卫通系统的初始对星时间及稳定精度。
本文设计的高通量轻小型机载卫通系统特别适用于整机重量要求轻、机舱内安装空间小的无人机。实测结果表明,该系统跟踪性能稳定可靠,指标优越,环境适应性、耐高低温性能、抗冲击性能到达国家军用标准,实际测试的数据传输速率可达8 ~10Mb/s,语音和视频实时传输效果良好,为后续产品量产奠定了基础。
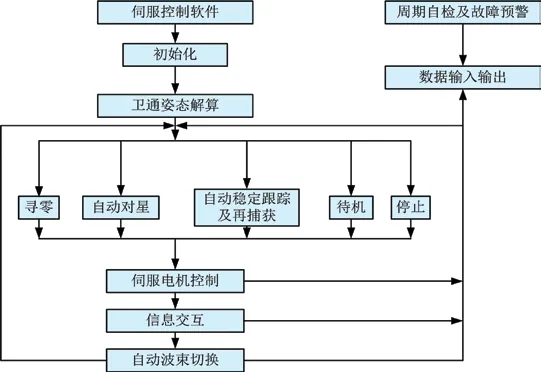
图1 伺服控制系统软件的工作流程。