无人驾驶清扫车的路径跟踪及远程控制
2022-02-01孙智威裴晓飞刘一平雍成昊
孙智威,裴晓飞,刘一平,雍成昊,陈 词*
(1.武汉理工大学,现代汽车零部件湖北省重点实验室,武汉430070,中国;2.武汉理工大学 汽车工程学院,武汉430070,中国)
近年来,无人驾驶汽车正逐渐渗透于各个商用领域。由于无人清扫车工作车速较低,行驶工况较为简单且固定,这些特点有助于无人驾驶技术的快速落地,同时无人清扫车也将在环卫领域发挥重要的作用[1]。和其他无人驾驶汽车关键技术一样,无人清扫车也集成了环境感知、高精度地图、导航定位、智能决策、路径规划、运动控制以及车辆线控执行等先进技术。
车辆运动控制是无人驾驶汽车分层架构中的重要基础环节,一般可以分为基于几何学模型,运动学模型和动力学模型的路径跟踪方法[2]。目前常用的路径跟踪控制方法有纯跟踪算法[3]、Stanley 算法[4]、比例积分微分(proportion integration differentiation,PID) 控制、滑模控制[5]、模型预测控制等。
纯跟踪算法和Stanley 算法基于车辆几何学模型进行解算,简单实用,鲁棒性较好,适用于较低车速和小侧向加速度的工况。国内外学者也对这两种路径跟踪算法开展了许多研究,文献[6]基于差分全球定位系统(global positioning system,GPS),提出了一种纯跟踪改进算法,使无人驾驶车辆在弯曲度较大的区域内能根据道路曲率变化自动调整车速和前视距离,提高了无人驾驶车辆在大曲率变化路径上行驶的平稳性。文献[7]将纯跟踪算法应用到农机中,基于农机的运动工况提出了改进的纯跟踪模型,提高了农机作业时的直线行驶精度。文献[8]基于一辆铰链式无人驾驶清扫车,根据清扫车速度和道路曲率信息及时调整车辆的预瞄距离,然后进行纯跟踪控制。文献[9]在纯跟踪模型的基础上提出了一种基于模型预测延迟后的车辆运动和位置信息的方法,并根据方向偏差来获取最佳的车辆预瞄距离。
文献[10]在Stanley 跟踪算法的基础上,基于车辆航向角、车速、前轮转角和道路曲率信息得到自适应最优预瞄时间。此外,考虑到滑模控制方法对参数不确定性和外部扰动具有强鲁棒性,文献[11]基于二自由度车辆模型,综合考虑车辆与期望路径点之间的方向偏差与横向偏差,提出了一种模糊滑模控制器。文献[12]基于滑模控制算法,设计了扩张状态观测器,减轻了在横向控制中滑模变结构方法存在的抖振问题,使无人驾驶车辆能够在有外界干扰的情况下更平稳的跟随期望轨迹。
作为无人驾驶汽车落地的前提,设计冗余的安全机制非常必要,因此需要同步发展远程接管技术。当无人驾驶汽车遇到决策困难或极端危险场景时,由远程安全员接管车辆控制权限,手动操作实现车辆脱困。文献[13]设计了一套车载终端和远程监控信息系统,实现了对无人驾驶车辆的行驶过程监测、远程启停控制和数据远程采集传输等。文献[14]针对无人驾驶车辆设计了一套云代驾系统,当无人驾驶车辆发生故障时,人类驾驶员可以远程协助无人驾驶车辆脱困。文献[15]对车载终端的功能进行拓展,实现了车辆固件远程升级、车辆远程控制等功能。
本文设计了无人清扫车的软硬件架构,搭建了线控化的无人驾驶清扫车实验平台,针对无人清扫车的路径跟踪和远程接管系统展开研究。路径跟踪控制一般分为横纵向跟踪控制,由于无人清扫车一般匀速行驶且工作车速较低,因此本文主要针对横向控制提出了纯跟踪前馈加滑模反馈的路径跟踪方法。对本文路径跟踪方法和远程控制方案进行了实车实验与分析。
1 无人车清扫车的总体架构
为了适应不同的工作场景和保证无人驾驶清扫车运行安全可靠,本文设计的无人清扫车共有三种操控模式,分别为驾驶员操控模式,自动驾驶模式和远程接管模式。3 种控制方式中,将驾驶员的优先级设置为最高,车辆优先执行驾驶员的操控命令。当按下自动驾驶按钮时,车辆由车载智能终端进行操控。如果车辆在自动驾驶模式下失效,可由安全员借助远程接管系统对车辆进行紧急干预,并远程操控车辆行驶。
1.1 硬件架构设计
本文实验平台基于的纯电动清扫车,采用后轮驱动,前轮转向,体积小巧,转向灵活,配备完善的清扫设备,适用于园区、厂区、港口等道路的清扫作业。为了适应市场需求,无人清扫车要能完成对特定区域的最大化覆盖清扫,能够对道路边沿进行清扫,能够主动躲避障碍物,同时应尽量降低成本。本文设计了如图1 所示的无人清扫车硬件架构,对电动清扫车上进行底盘线控化改装,并加装低成本的环境感知传感器和整车控制器。

图1 无人清扫车硬件架构图
本文采用优控智行的整车控制器EV2274A 与底层执行机构建立通讯,电动清扫车的转向电机采用一款最大输出扭矩2.38 Nm 的永磁直流电机,转向系统电机控制器通过局域网CAN 总线接收整车控制器的指令信号,然后控制转向电机运动。驱动电机输入电压0~5 V,输出功率最大可达2.2 kW。整车控制器通过脉宽调制(pulse width modulation,PWM)接口外接一个PWM转模拟量模块输出电压信号,控制驱动电机的输出功率。电动清扫车的制动系统采用一款伺服电动缸,最大输出1.0 kN,通过钢索装置拉动制动踏板进行制动。整车控制器通过低边驱动接口输出控制信号,控制制动电机的伸缩。改装后的车辆保留了原车的操控踏板与控制方式,驾驶员可正常操控清扫车。
为了实现车辆的无人驾驶功能,让车辆具备环境感知能力,在车辆的四周加装了8 个超声波雷达,在车辆的前方左右两侧安装两个激光雷达。同时,通过全球定位系统GPS 和惯性测量单元IMU 进行数据融合,通过组合惯性导航得到车辆的实时位置。将传感器采集到的环境和位置信息传输到英伟达Xavier 处理器中进行融合计算,整车控制器通过CAN 通讯接收处理后的环境信息,然后由整车控制器向车辆底层各执行器发送控制指令,驱动车辆执行转向、加减速、制动等指令,实现对车辆的运动控制。同时,将电动清扫车的清扫设备,如清扫电机、水泵以及照明、喇叭等全部接入整车控制器,可以由控制程序适时开启和关闭。
本文设计了一套远程接管系统作为无人驾驶清扫车的安全备份,远程控制终端通过无线通讯模块接收来自摄像头的视频数据和车辆的运行参数,远程安全员可以通过远程外设下达操控指令并接管车辆。
1.2 软件架构设计
本文为无人驾驶清扫车设计了如图2 所示的软件架构,将无人驾驶清扫车的自动驾驶架构分为3 个部分,分别是环境感知、决策规划和运动控制。
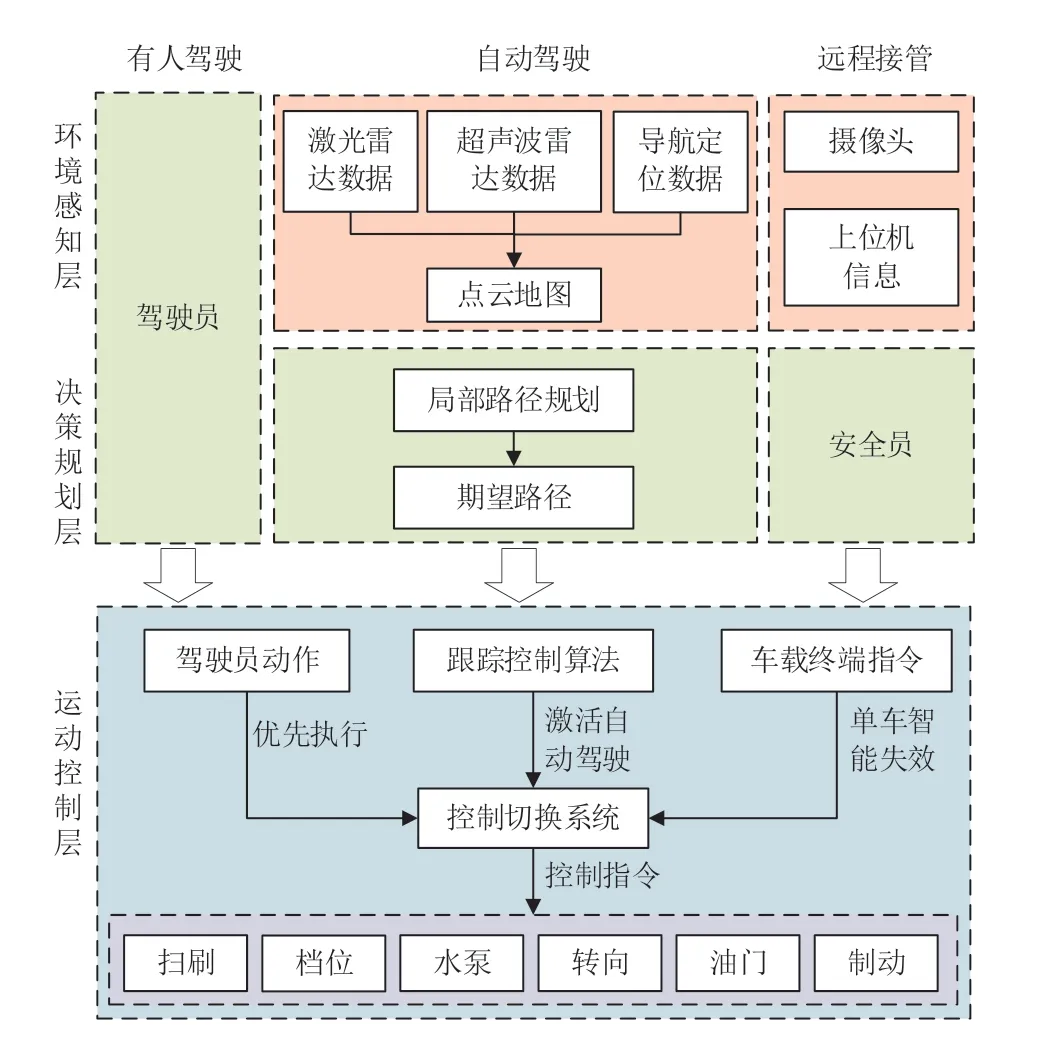
图2 软件分层架构
环境感知层通过感知传感器和导航定位单元帮助车辆判断自身和周边环境的相对位置关系。无人清扫车GPS 定位系统和IMU 惯性导航系统通过Kalman滤波进行信息融合,向下游规划控制提供车辆的位置、速度、航向角等信息。激光雷达主要负责可行驶区域的提取及动态/静态障碍物的目标检测,超声波雷达作为激光雷达的补盲,两者将感知到的环境信息等发送给决策规划层。
决策规划层根据车辆定位和环境信息,每隔100 ms规划出从当前状态到下一个目标状态的局部路径。当前方车道被静态障碍物占据时,利用五次多项式生成多条备选路径,并根据代价函数计算出无人清扫车的可行驶最优路径。当前方车道有动态障碍物且小于Berkeley 最小安全距离时,无人清扫车采取紧急制动避撞。
运动控制层接收来自决策规划层输出的车辆可行驶路径,通过车辆横向控制和纵向控制,得到车辆的转向角度、油门开度、制动压力等控制指令,实现车辆对期望车速和路径的跟踪。本文默认决策规划系统已经给出了最优的期望路径,对离线路径进行跟踪控制,控制周期为 10 ms。
作为自动驾驶模式的安全冗余,系统软件架构中同时集成了远程接管模式。远程安全员可以通过上位机界面观察车辆的运行状态,当无人驾驶清扫车自动作业发生失效时,可以由安全员进行远程接管遥控车辆运动。
2 无人清扫车的路径跟踪算法
无人驾驶清扫车通常在低速,小侧向加速度工况下执行清扫任务,采用基于几何学模型的路径跟踪算法能够简化系统建模,有利于算法快速求解,降低控制器的计算需求。本文采用基于几何学模型的纯跟踪控制算法作为前馈控制,根据期望路径的路点信息和车辆当前的位置信息,利用纯跟踪控制理论,计算出期望的前馈前轮转角。反馈控制以车辆当前位置的质心横向偏差和方向偏差为控制变量,基于滑模控制对前馈控制中没有考虑到的控制偏差进行补偿控制,让无人驾驶清扫车能够更精确的跟随期望路径行驶。为保证路面清扫洁净度,无人驾驶清扫车的工作速度较低,且多为匀速行驶,因此纵向控制采用简单的PID 方法实现。最终路径规划的总体框架如图3 所示。
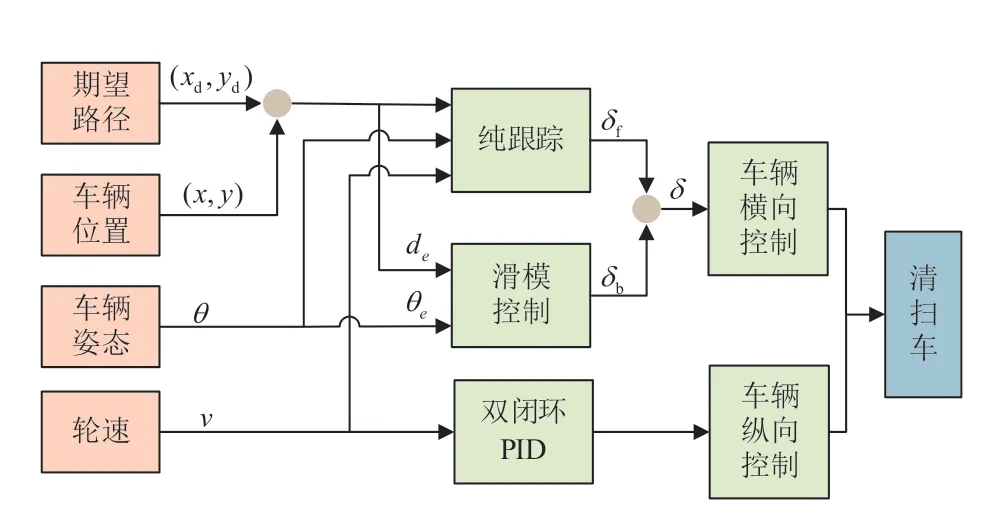
图3 路径跟踪控制架构
2.1 基于纯跟踪算法的前馈控制
纯跟踪算法的几何关系图如图4 所示。
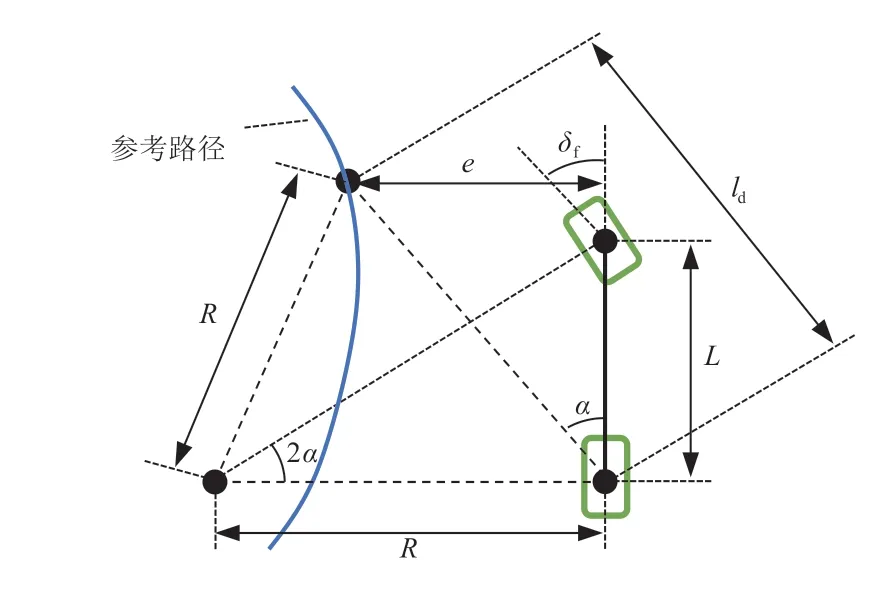
图4 纯跟踪算法几何关系图
纯跟踪算法基于车辆的二自由度模型,通过控制车辆的转向半径R,使车辆的后轴中心控制点沿圆弧到达前视距离为ld的参考目标点,然后基于Ackermann转向模型计算得到所需的前轮转角δf。根据几何关系可得

根据Ackermann 转向车辆模型,有

由式(3)和式(4)可得前馈前轮转角的控制律为

由式(3)可知:纯跟踪算法本质上是曲率ρ关于预瞄点到车辆中心平面的垂向距离e的比例控制,增益系数为2/ld2。纯跟踪算法的跟踪效果好坏与预瞄距离ld的选取相关联,前视距离过小会使车辆在路径跟踪时产生摆动,而前视距离过大又会导致车辆在弯道时转弯幅度不足。本文根据车速实时调整车辆的预瞄距离,跟踪效果较好。无人驾驶清扫车首先接收来自上层规划的路径信息,通过GPS 定位系统和IMU 惯性导航系统融合获取无人清扫车的位置信息和姿态信息,计算预瞄点处与车辆位置之间的横向偏差,然后根据车速信息匹配合适的预瞄距离,通过式(5)计算得到期望前馈前轮转角δf。
2.2 基于滑模变结构的反馈控制
车辆横向控制中存在诸多扰动因素,比如车辆底层通讯和转向执行机构的延迟,路面附着系数的变化等。单纯的纯跟踪算法并未考虑车辆动力学特性和转向执行器的动态特性,在某些工况下可能会导致跟踪性能恶化。因此,本文设计了基于滑模控制方法的反馈系统,对前馈控制中未考虑到的控制偏差进行补偿,增强横向控制的鲁棒性,提高路径跟踪的控制精度。无人驾驶清扫车的工作场景大部分为低速工况,本文不考虑车辆极限驾驶工况,假设无人驾驶清扫车的质心侧偏角等于前轮转角。本文的控制变量选取车辆质心处与期望路点之间的车辆位置偏差de和航向角偏差θe,采用滑模控制方法进行反馈控制。车辆位置偏差几何关系图如图5 所示。

图5 车辆位置偏差几何关系图
车辆当前位置与参考路径之间的位置偏差可由如下动态模型表示。

基于车辆质心处的车辆位置偏差de和航向角偏差θe,设计车辆路径跟踪滑模反馈控制系统,定义滑模切换函数如下

滑模趋近律如下

上式中,k1和k2为滑模趋近律参数,且均大于0。
为了减轻车辆横向控制中的前轮抖动问题,使用饱和函数sat[·]代替符号函数,即

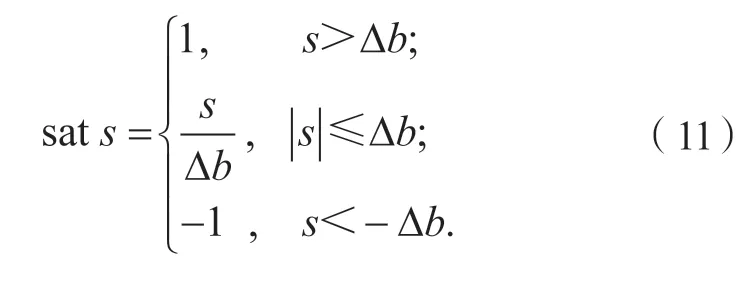
式中,Δb为边界层厚度。
基于上述切换函数和滑模控制律,结合控制偏差的动态模型,可以得到路径跟踪反馈控制律为:
将指数趋近律代入式(12)可得期望反馈前轮转角为

通过纯跟踪前馈控制和滑模反馈控制分别得到前馈前轮转角δf和反馈前轮转角δb,最后可得车辆的期望前轮转角为

3 无人清扫车的远程控制系统
本文设计了一套远程接管控制系统,作为无人驾驶清扫车的安全冗余备份,当车辆发生单车智能失效时可由远程驾驶员接管车辆。远程控制系统是作为有人驾驶、自动驾驶、远程接管3 部分中的其中一环。在隧道、林荫等处,卫星信号有遮挡或多 障碍物的狭窄复杂环境中,自动驾驶模式可能无法准确跟踪期望路径,车辆会自动进行安全停靠。当车辆出现异常并安全停靠之后,远程接管员可以借助远程外设操控车辆行驶。当车辆经过以上区域后,再次切换为自动驾驶模式进行跟踪控制。
无人清扫车远程接管系统架构如图6 所示。其主要分为远程控制终端和车载终端2 部分。车载终端通过车载直流电源进行供电,车载摄像头负责采集车辆前方环境信息,并通过无线通讯模块发送给控制终端。车载终端的微控制单元(micro control unit,MCU)核心板解析接收远程控制指令并通过整车局域网CAN 将操作指令下达给车辆底层执行器,实现对清扫车转向、油门和刹车的控制。车载终端与控制终端之间建立1.4 GHz 自组网络(mesh),借助2 个鹅颈天线进行无线通讯。控制终端使用电池进行供电,控制终端的MCU 核心板接收远程操控手柄的控制指令,通过无线通讯模块传输给车载终端。同时,车载终端将清扫车的方向盘转角、油门开度等运行参数,反馈给远程操控平台,通过上位机软件显示给远程驾驶员。
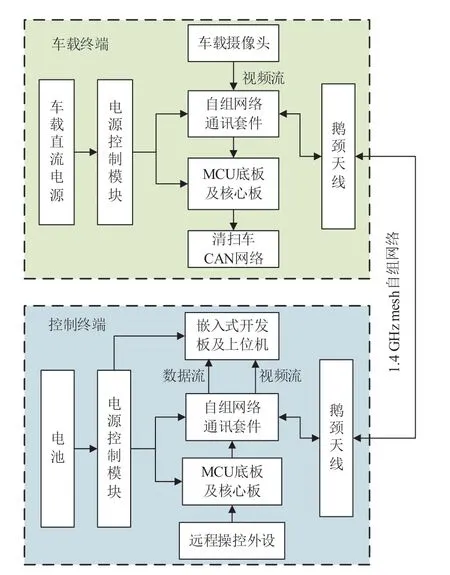
图6 无人清扫车远程接管系统架构图
在远程控制系统中,控制终端采集到输入的控制指令后,根据远程接管系统自定义的通信协议,对控制指令进行重新编码,打包发送给无线通讯设备,传输给车载终端。车载终端接收到控制指令的数据包后进行解码,然后将所有指令通过车载CAN 总线发送给各对应控制器执行。同时,本文设计了控制终端的上位机界面,其操作简单、显示直观,将全部信息在一个界面显示,最终设计的效果如图7 所示,其中界面使用的控件设计参考了开源项目[16]。当通讯出现中断时,车载数据指示灯将转变为红色,提醒操作人员对通讯连接进行检查或重置。

图7 上位机显示效果图
基于该清扫车平台,对远程接管系统的远程控制功能进行了实验验证,在本实验中,控制终端部署于车库内的休息区,操控人员通过远程控制的方式操控清扫车驶出车库,在车库外道路行驶一段距离后,调头返回车库泊位。实验过程的关键节点如图8 所示,图中的时间序列为从左到右,从上到下。实验结果表明本文设计的远程控制系统安全可靠,能够作为无人驾驶清扫车的安全备份。

图8 远程控制实验画面节点图
4 无人清扫车的路径跟踪实验
基于改装后的无人清扫车平台,通过实验验证本文设计的路径跟踪算法的有效性。本文首先在离线环境下根据行驶要求提前规划好目标路径,在低速工况下进行实验,分别验证对比了单移线和环形路径下本文的前馈加反馈的跟踪算法与只使用反馈的跟踪算法的结果差异。其中前馈采用纯跟踪算法,反馈采用滑模算法。
单移线路径跟踪实验结果见图9。
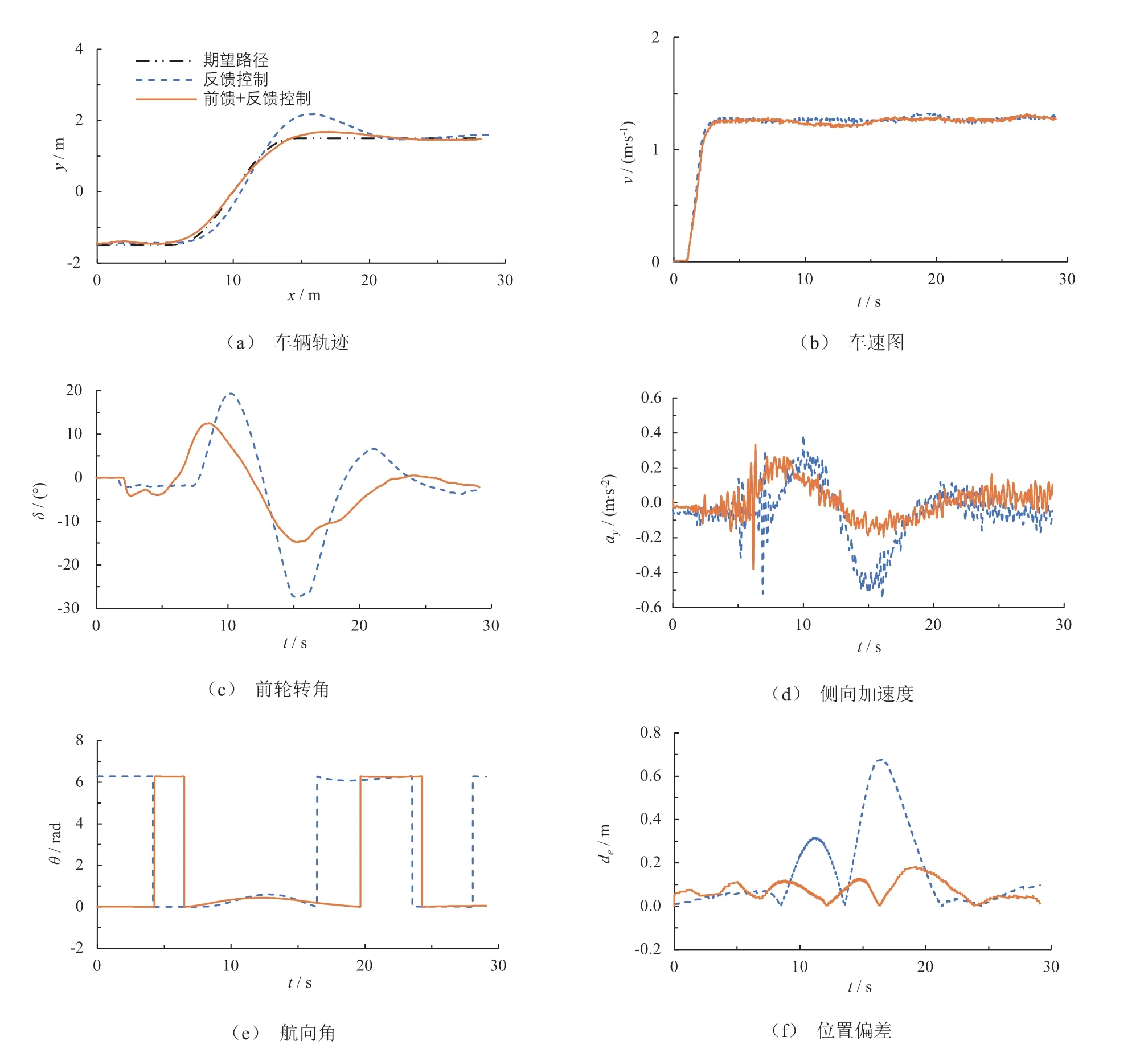
图9 单移线路径跟踪实验结果
由图9a 可知:前馈+反馈控制的方法能够有效降低车辆跟踪的横向偏差和纵向偏差。图9b 实验车速为1.25 m/s。由图9c 可知:反馈控制方法的前轮转角在第10 s 处为19°,前馈+反馈控制方法在第8 s 处达到最大值12°,前馈+反馈控制方法超调更小。
由图9d 可知:反馈控制方法在车辆回正时有较大的侧向加速度,在第15 s 时达到-0.55 m/s²,而前馈+反馈控制的方法车辆回正时的侧向加速度较小,车辆姿态稳定。
由图9e 可知:在变道时前馈+反馈控制的方法车辆航向角变化更平缓。由图9f 可知:反馈控制方法的位置偏差波动较大,最大位置偏差在第16 s 时达到0.67 m,而前馈+反馈控制方法的车辆位置偏差始终保持在0.3 m 以内,偏差较小。
环形路径跟踪实验结果见图10,实验过程中,让车辆连续跟随环形路径2 周。
由图10a 可知:采用前馈+反馈控制方法能够更精确的跟踪期望路径,偏差更小,且跟踪重复性较好。反馈控制方法在环形弯道处会出现较大的偏移。图10b实验车速为2.5 m/s。由图10c 可知:采用前馈+反馈控制方法,在车辆转弯时,前轮转角变化更为平缓稳定,采用反馈控制方法会有较为明显的超调。由图10d可知:2 种方法的侧向加速度相差不大,但采用反馈控制方法会有一定的滞后。由图10e 可知:采用前馈+反馈控制的方法,车辆在弯道时转向更快,在直线段航向更平稳。由图10f 可知:采用前馈+反馈控制方法,车辆的位置偏差保持在0.3 m 以内,而采用反馈控制方法,车辆位置偏差在第43 s 时达到0.65 m。

图10 环形线路路径跟踪实验结果
综上所述,采用本文提出的纯跟踪加滑模的路径跟踪算法,能够有效降低车辆跟踪时的位置偏差,车辆的车身姿态更稳定,且控制效果较为灵敏,滞后较小,适用于无人驾驶清扫车的路径跟踪应用,更能满足无人清扫车贴边行驶的作业要求。
5 结论
本文基于电动清扫车平台完成底盘线控化改造,设计了无人驾驶软硬件架构,提出了纯跟踪前馈加滑模反馈的路径跟踪方法,通过实车实验表明,该方法能够使无人清扫车在低速工况下准确跟踪期望路径实现贴边作业。同时,本文设计验证了一套远程接管控制系统,作为无人驾驶清扫车的安全冗余备份,能够在自动作业失效时由安全员远程操控车辆。今后考虑完善无人清扫车的环境感知和路径规划功能,实现复杂环境下无人清扫车的应用落地。
