稀疏地磁点位辅助PDR室内定位研究
2022-01-26刘江春权怀炜
席 超, 蔡 劲 ,刘江春, 杨 博, 权怀炜
(航天恒星科技有限公司(503所),北京 100080)
全球卫星定位系统(Global Navigation Sates,GNSS)以其具有的全球性、普适性、高精度等导航定位特点覆盖了军事、测绘、航空、航海等诸多领域,而在井下、隧道、地下等室内环境其覆盖不到,室内定位作为导航定位的“最后一公里”,一直是一个世界难题,如何将其解决成为人们当今研究的重点。
现代人70%以上的时间在室内度过。随着城市化和城镇化发展的日新月异,城市“峡谷”和大而密闭的室内日益增多,对室内定位提出了前所未有的巨大要求。中国社会救助学会发布统计数据显示,据不完全统计,我国在机场、商场、车站、养老院、幼儿园等室内环境中丢失的儿童、精神病患者、老年人等每年超过20万,在室内恐怖袭击[1]、房屋坍塌、室内爆炸、室内火灾等事故中伤亡人数每年超过3万人,从提高室内援救效率,减少室内人员失踪和人员伤亡来看,室内定位作为21世纪最迫切急需解决的问题必将成为撬动千亿级项目的突破口。
文中研究的稀疏地磁点位[2]辅助PDR[3]不仅在使用环境上无任何要求,同时在数据处理速度、数据采集工作量上、定位精度综合考量等各个方面使室内定位技术达到了一个新的高度。
1 室内PDR定位
二十多年来,国际国内许多研究所、大学和公司对室内定位机制进行了大量的研究,据不完全统计,目前已提出室内定位系统(Indoor positioning system,IPS)近二十种:WIFI、LED、RFID[4]、ZIGBEE、蓝牙(BT)[5]、超声波、GSS转发器、伪卫星、计算机视觉、激光、超宽带(UWB)[6-7]等等。这些IPS其有效性是无疑的,但在一个狭小的室内空间内需要部署多个信标才能实现室内定位,如果要满足全球普适无缝的要求,信标部署基础设施建设费用将是一个惊人的天文数字。作用范围小、建设成本高和普适性差等弊端,很大程度制约了它们的广泛推广。文中研究的室内地磁定位是基于墙体内钢筋、电缆以及外部一些具有磁力的设备引起一定程度的异常,这样使得一些地磁场的地磁值产生较大的变化,采集并通过匹配突异点定位。与此同时行人航迹推算(Pedestrian Dead Reckoning,PDR)是一种独立的惯性定位方法,其通过传感器采集三轴加速度计、三轴陀螺仪、三轴磁力计并解算出步频、步长、航向进行定位估算,此两种方法均可有效解决信标部署中所花费的费用,同时也不受外界因素(电源、停电、人为破坏)的影响。
1.1 PDR算法及仿真
PDR定位就是通过传感器ADIS16405中的陀螺仪、加速度计、磁力计对航向、步长以及步频数据进行采集和处理,流程如图1所示。
1.2 步长检测估计
步长的估计模型[8]有很多种,目前最常用的是线性步长模型与非线性步长模型。
TL=af+b,
(1)
(2)
式中:a,b为常数;f为行走时的步频值;M为常数;amax为加速度的最大值;amin为加速度的最小值。在本次研究实验中所使用的为非线性步长模型进行计算。

图1 PDR定位过程
1.3 航向估计
对于航向的估计模型[9]文中采用了四元数的刚体运动方程:
(3)

(4)
式中:q0是四元素的实部;q1,q2,q3是四元素的虚部;ω1,ω2,ω3是陀螺仪所测得的已知3个数值。Q=[q0,q1,q2,q3].并由式(3)、式(4)求得q0,q1,q2,q3值。
通过b系到R系的坐标转换矩阵:
(5)
并令

(6)
将式(5)、式(6)整理合并,确定出b系至R系的转换矩阵为:
(7)
(8)
最终得到航向角:
(9)
其中[q0,q1,q2,q3]已由式(3)、式(4)两式求解为已知变量。
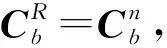
实验结果表明,在定位时虽然不需要采集地磁值并建立地磁基准图,但定位误差随步数累积,使得最终的误差一直在变大,最后可能变成一个错误的定位结果。
在试验场馆走廊(长2 m×33 m,宽2 m×18 m,中部12 m×33 m为空)进行测试,行走一圈的定位结果及误差分析如图2所示。
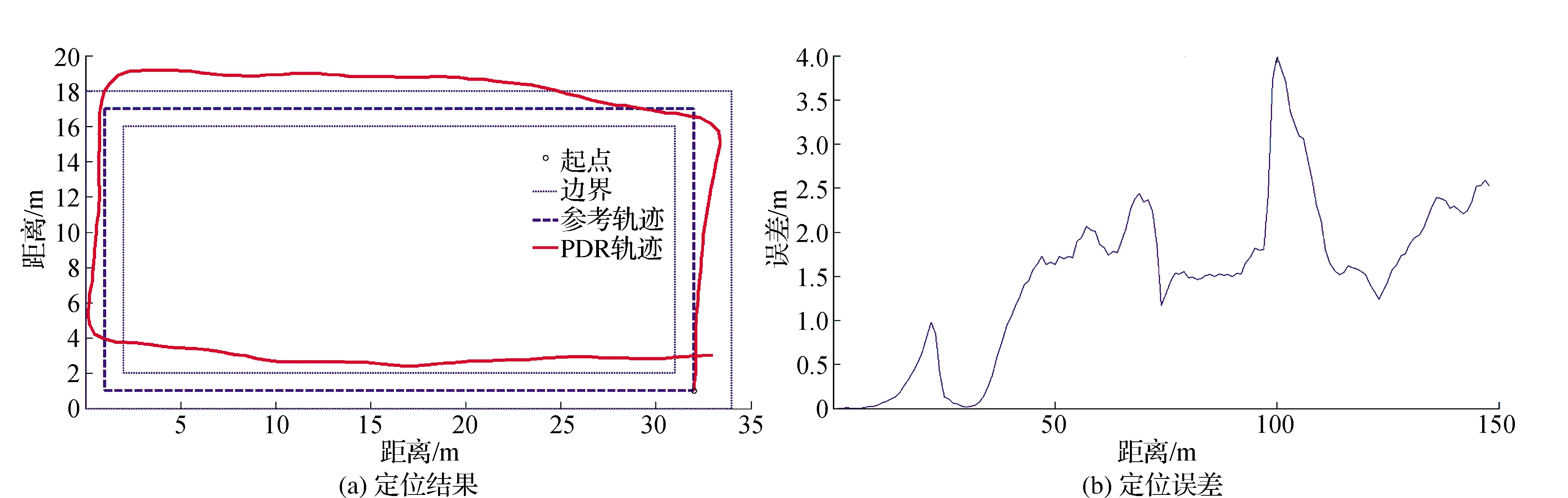
图2 试验场馆走廊行走一圈定位结果及误差分析
2 室内地磁定位
地磁场是地球所固有的特性,一端在南极,一端在北极,地球上每一点都有其对应的地磁值,而文中所用到的地磁是室内地磁的突异点,由于建筑中的布局不同导致在不同的位置其地磁的强度也不同,有些点位的地磁值与周围差距无异,有些点位的地磁值“鹤立鸡群”,例如在空旷的大厅内有几根承重柱,越靠近承重柱地磁强度也就越大,其地磁值与其他空旷地方的地磁值有显著差异,人们利用这些特性进行地磁匹配定位[10]。
通过传感器采集地磁值后将地磁数据传输至数据库中,在进行匹配定位时一般要求高精度时选择协同克里金插值法,要求高建模速率时选择标准高斯过程回归。本实验采用协同克里金插值法进行研究,再使用蒙特卡洛定位算法。
首先带入测量的某一点X,Y,Z值与地磁基准图的x,y,z:
(10)
将值D带入
p(yt|xt)=(1/2πσ)1/2exp(-D2/2σ2),
(11)
p(yt|xt)=λexp(-D/λ),
(12)
(13)
经过滤波、矫正:
p=(xt|y1…yt),
(14)

如图3为在长33 m宽18 m场地行走一圈得到的定位结果以及在行走的同时每一步的定位误差,定位误差统计如图4所示,最大误差为1.3 m,平均整体定位精度为0.87 m。定位精度相比来说较好,但采集地磁值、建立地磁基准图所花费的时间较长,并且在运算定位时计算机处理工作量较大,处理时间过长。

图3 试验场馆走廊行走一圈PDR
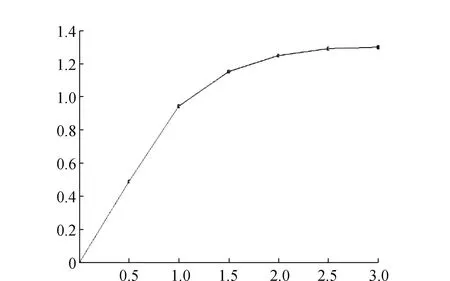
图4 地磁定位结果及误差分析
3 室内关键点定位
室内关键点定位首先通过传感器对于一些具有特征的地磁突异点,例如:房门、水泥承重柱、磁标等进行采集,而并非将所有的室内位置一一进行采集,将采集完成的数据上传服务器并存储至数据库中,在定位时通过PDR进行实时定位,当匹配到数据库中存储的地磁值时,PDR定位结果与地磁定位结果取权重,将PDR定位所产生的误差进行校正,再以新的定位点作为起始点进行继续定位。定位流程图如图5所示。

图5 地磁特殊点定位流程
在与前两个场景相同的试验场地,如图6所示,首先离线采集稀疏地磁指纹,选取房门为突异点,仅采集房门外2 m×3 m区域地磁值,如图6中阴影部分所示,将地磁指纹存储至数据库中,然后再进行定位。
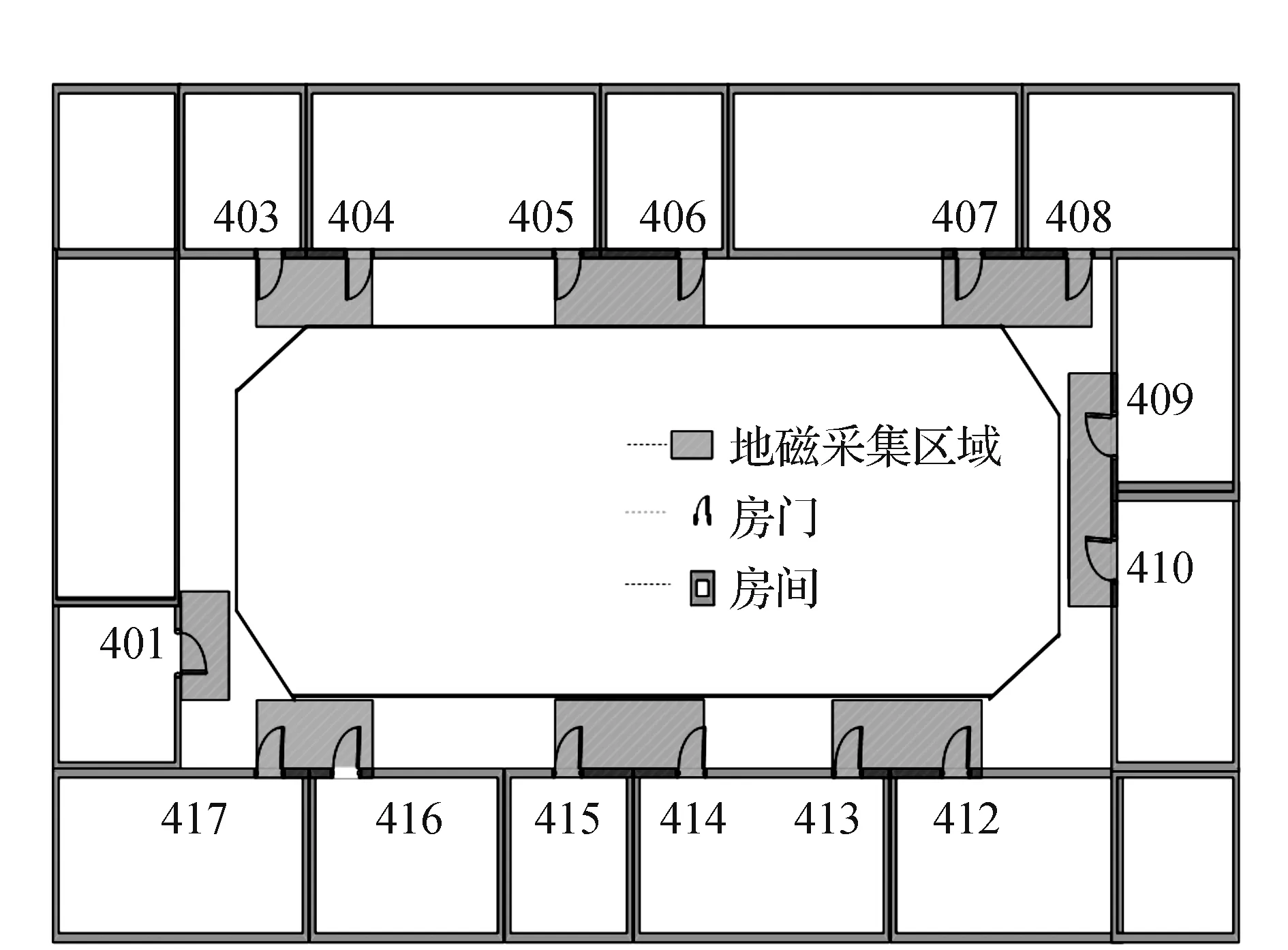
图6 稀疏地磁点位辅助PDR定位实验场地平面图
所采集的地磁指纹存储在地磁库中,通过PDR(步行者航迹推算)算法进行定位,当匹配到地磁指纹时使用地磁定位结果对PDR定位结果进行校正,定位结果及误差如图7、图8所示。与前两种测试场所一致,在长33 m宽18 m的场地进行测试,行走一圈的定位结果。行走一圈900个数据采样点与参考轨迹之差为每个采样点的误差,最大误差为2.6 m,最小为0 m,有600个以上数据采集点定位精度在1 m以内,将所有误差加权平均,室内关键点定位精度达到0.99 m。采集数据及处理数据所消耗的时间为2 min 33 s,相比常规的室内定位方法在定位整体精度上所差无异,而在前期采集及实时处理上的时效性有较大提升。

图7 试验场馆走廊地磁关键点定位结果
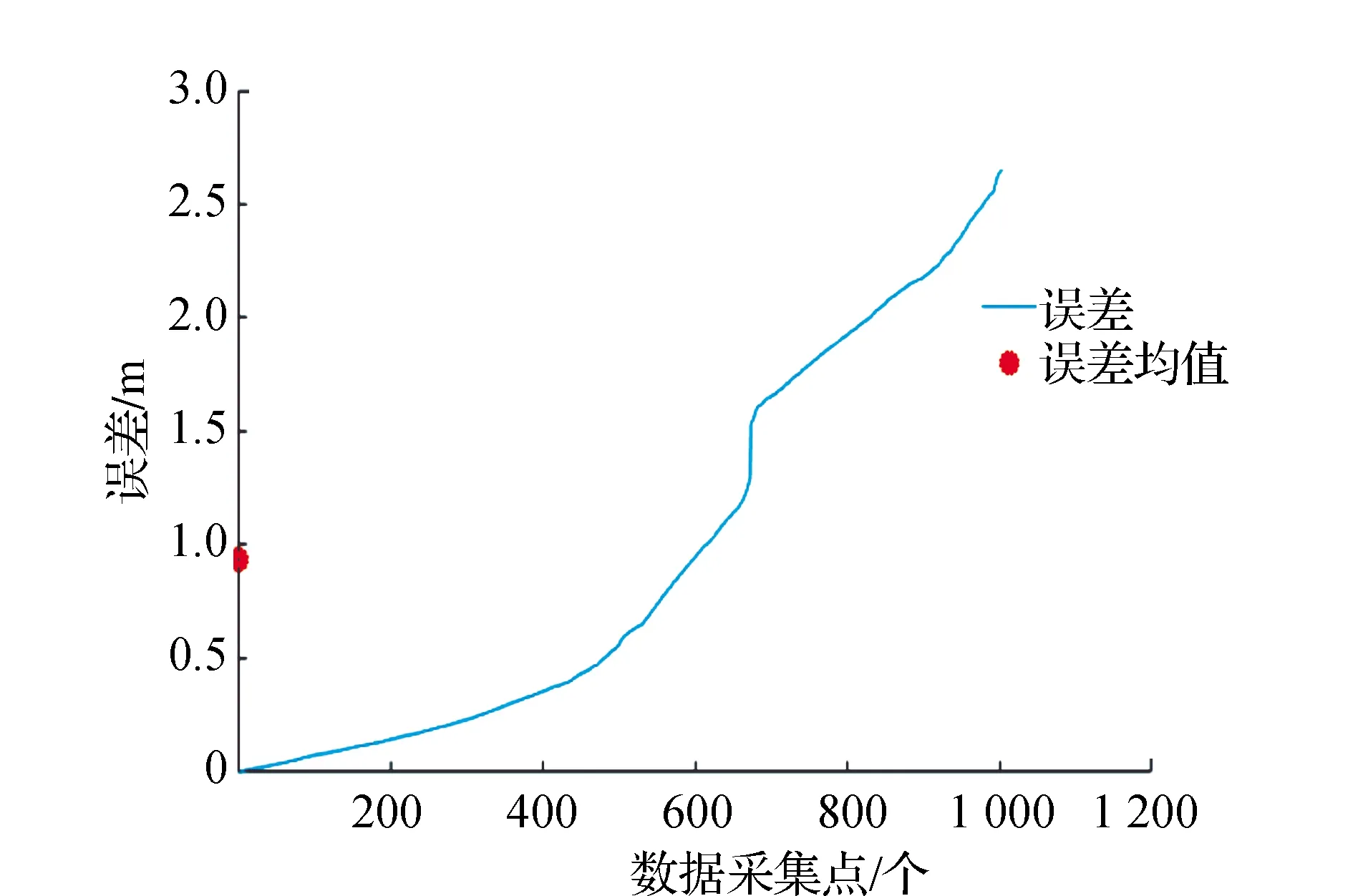
图8 试验场馆走廊地磁关键点定位误差
4 数据分析及总结
经上述实验研究分析,相同的环境、相同采集处理工具前提下:
1)在单纯使用PDR进行定位,绕图书馆行走一圈,平均定位误差达到2.08 m,虽然其不需要进行地磁点位的采集及地磁基准图的建立,但由于使用PDR定位会存在一定的误差累计,如继续行走误差会继续增大,以至于超过2 m。
2)在使用PDR&地磁定位时,地磁点位实时矫正PDR定位结果,使之定位的精度在行走一圈中平均定位误差为0.87 m,定位前期准备工作包括采集地磁值、建立地磁基准图花费时间5 min以上。
3)使用稀疏点位地磁指纹矫正PDR,在前期地磁点位采集时仅使用2 min 33 s 46,最终定位精度高达0.99 m,仅比地磁&PDR定位精度低0.12 m,但处理时间及采集时间是其无法比拟的。表1为相同情况下定位及处理结果比较。
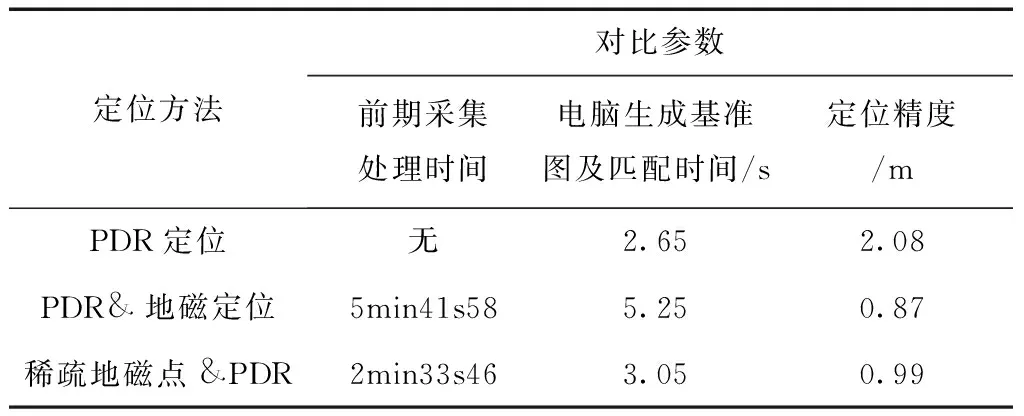
表1 3种定位方法的处理结果比较
由表1可以看出,在使用关键地磁点&PDR进行定位时的方便快捷和令人满意的定位在定位由室外向室内转移的方向上作出了真正意义上提高、改进甚至变革,必将在后期的工业化生产上得到广泛的应用。
