三原则整体最小二乘用于平面自由网平差计算
2022-01-26郭绍禹
郭绍禹
(江西理工大学,江西 赣州 341000)
“整体最小二乘理论”应用到测绘领域是一种新理论,是近十年来许多学者的研究方向,并取得了算法和应用方面的研究成果[1-12]。但是,还缺少适用于平面自由网平差的研究成果。
由Adcock[13]提出的“系数矩阵A有误差ΔA”需添加改正数VA的整体最小二乘模型可写为:

(1)
(2)

文中在“平面网平差”中应用了“整体最小二乘理念”,获得一种“三原则整体最小二乘”新方法,它能消除“系数误差ΔA和参数系统误差Δx”,适用于平面自由网平差。
1 最小二乘的模型和误差


(3)

(4)

(5)
(6)


Δxj=xj-d=QjATPAd-d.
(7)

当XO的误差ΔX=XO-XⅡ≈XⅠ-XⅡ=-d的绝对值小于0.3 m(作者实验值)时,误差ΔA对V没有影响。
当误差ΔX大时,用XO计算的系数矩阵A有误差ΔA,其非线性误差会影响平差而使V增加新误差ΔV。为了去掉ΔV,应该消除系数误差ΔA。
2 三原则整体最小二乘的模型

(8)

(9)
的三原则整体最小二乘即TPTLS新方法。
为了保持式(9)中各量的相同数量级,文中设定检验V,VA,VX末位数值的单位是:V单位(″);在VA=VA×107之后VA=1;VX单位mm。
算例实验容易实现VA,VX的绝对值小于0.01,明确规定0.5是检验数值标准。当由电脑检验VA,VX的Abs(V)<0.5时,则显示VA=0,VX=0(注意这里的0不是数学0,而是显示为0),则分别消除了原先的误差ΔA,Δxj。

由此观念和经验认识:TPTLS模型是“经过很多次的平差”,还要“多次的由电脑检验VA=0,VX=0”的模型式。

3 三原则整体最小二乘的解算方法
TPTLS解算方法不是唯一的,文中介绍两种方法。
第一种TPTLS解算方法:灵活采用LS解算法,很多次循环运行LS,多次换用“参考点组”或“近似坐标”,逐次改变A等各种值趋近最终值,最后实现“VA=0,VX=0”而满足三原则的准则。
逆阵Qj的计算式为:
(10)
(11)
协因数Qxx的计算式为:
Qxx=Qj(ATPA)Qj.
(12)
当平差运行到第2)大平差步骤时才需要计算改正数VA,VX,其计算式:
VA=Ai-Ai-1,
(13)

(14)

第i次运行VA,VX的检验过程如下:


4)检验绝对值:VA=VA×107, Abs(VA)<0.5,Abs(VX)<0.5 mm(在数组中分别保存VA,VX值供最后输出用) 。
当检验绝对值均小于0.5时,即显示VA,VX为0,结束循环运行;否则继续。
稳定性检验用文献[17]的单点检验,判别式为:
(15)

在文中,系数误差是“系数矩阵A的误差”的简称。因为是灵活采用LS解算法,因此不需要组成“系数矩阵误差”。
4 TPTLS的平差步骤
TPTLS自由网平差的要求:
2)要消除→误差ΔA,系统误差Δxj,粗差值L;
3)要“各个参考系”都得出相同的“各种平差值”。
TPTLS自由网平差的两大平差步骤为:
1)多次换用“参考点组”,选出w个稳定点:LS自由网平差多次循环运行;多次换用“参考点组”,利用式(10)—式(12)、式(15)求解;每次单点稳定性检验去掉一个参考点,最后选出w个稳定点的w号点组,结束循环。
2)多次换用“近似坐标”,消除误差ΔA,Δxj:LS自由网平差多次循环运行;多次换用“新近似坐标”,w号点组不变,利用式(10)—式(14)求解;每次检验是否Abs(VX)<0.5 mm,当满足此式时结束循环。然后运行“粗差检验”;最后按指定的参考点组利用式(10)~式(12)、式(15)求解一次后输出成果。
5 模拟算例
模拟算例的数据来源:假设Ⅰ,Ⅱ期的真坐标XⅠ,XⅡ,计算真位移d=(XⅡ-XⅠ),d作为Ⅱ期检验系统误差的依据;反算出真观测值LⅠ,LⅡ,添加随机误差得出观测值LⅠ,LⅡ。
模拟算例说明(用Basic 6.0 企业版编制的通用程序):
1)权P=1未打印,成果是最后一次的,进行粗差检验;
2)新Xo是最后的Xo;VA是VA;Vx是VX;Δx是Δxj;
3)VX全部输出;VA因太多而只输出两个方程的VA值。
5.1 证明TPTLS消除误差ΔA,Δxj
理论上证明“误差ΔA, 系统误差Δxj”是否消除的最好方法是:采用真坐标X,真观测值L,近似坐标XO,分别运行各种平差方法:

2)运行TPTLS,得改正数V=0,平差值L′=L,平差坐标X′=X,则证明误差ΔA,Δxj已消除。
因真观测值无误差,应该是V=0 ,X′=X。
表1是用真观测值的TPTLS自由网平差算例:真观测值L,S是与真坐标X配套的,近似坐标XO是前期的,平差能得出改正数V=0、平差坐标X′=X,这是从理论上严密证明:TPTLS消除了误差ΔA,Δxj。
表1 用真观测值三原则整体最小二乘平面自由网平差

表2是用真观测值的LS自由网平差算例:原始数据同于表1,平差得出V≠0、平差坐标X′≠X,这是从理论上证明:LS结果含有误差ΔA,Δxj影响。该算例是用来对比表1,证明TPTLS消除了误差ΔA,Δxj。
表1可看出:平差值L′=真观测值L;V=0;VA=0;稳定点的位移x=0;X′=X;Vx=0;Δx=0。
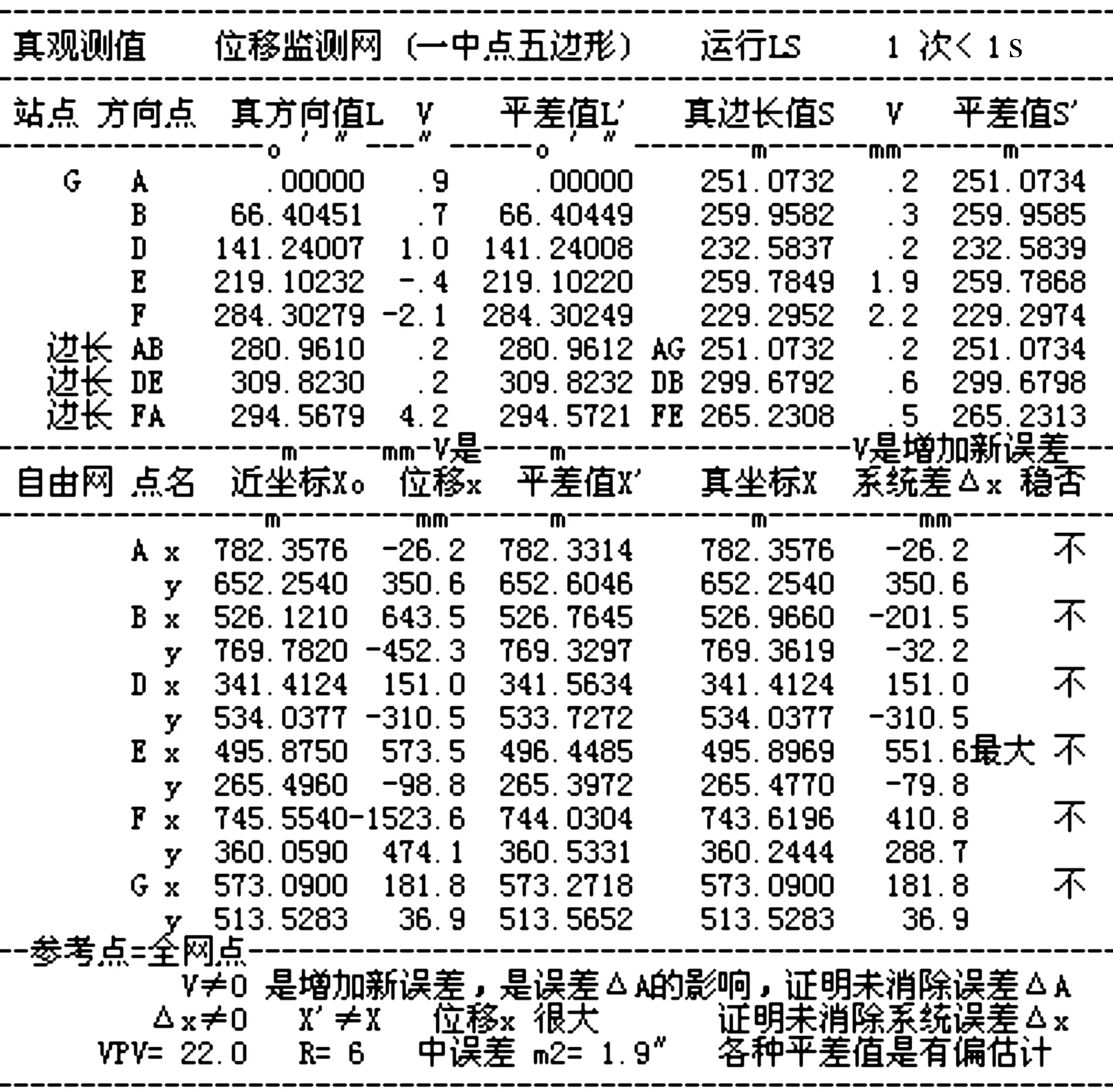
表2 用真观测值最小二乘平面自由网平差
表2可看出:L′≠L,V是增加新误差,证明有ΔA影响;稳定点位移x≠0;X′≠X;Δx≠0,证明有Δxj影响。
5.2 TPTLS的各个参考系均得出相同结果
表3、表4是用观测值的TPTLS自由网平差算例:原始数据相同,参考系不同,即表3的参考点组(ABDEFG )与表4的(ADF)不同,平差均能得出“各种平差值”完全相同,这也证明:TPTLS消除了误差ΔA,Δxj。

表3 三原则整体最小二乘平面自由网平差(ABDEFG)

表4 三原则整体最小二乘平面自由网平差(ADF)
表3、表4可看出:V,X′,位移x等“各种平差值”完全相同。
含有位移点的不同点组共有(26-23)=56组,定义56个不同参考系,采用TPTLS均能得出相同的“各种平差值”结果,即与参考系的选择无关。
表5为表1—表4的平差方法结果对比。采用LS则得出不同的结果;采用满足式(2)的TLS则得出V相同、位移x不同的结果。

表5 平差方法结果对比
6 结束语

2)TPTLS解算方法不是唯一的。文中采用LS解算法:先多次换用参考点组,后换用近似坐标,用LS的很多次平差运行来满足三原则的准则式(9)。这种解算方法能够消除“系数误差ΔA和参数系统误差Δxj”,各个参考系均能得出相同的“各种平差值”,且符合实际的无偏估计。
3)TPTLS方法适用于平面自由网平差,其最大的优点是:Ⅱ期选用“各个参考系”均能得出相同的“各种平差值”(即与参考系的选择无关),且能得出真位移d的无偏估计的位移x。经典的LS方法存在有“多个参考系得出多套位移x”的系统误差问题,TPTLS方法有效解决了此类问题。
