HERON LITE移动测量系统在房地一体中的应用
2022-01-26刘海砚陈晓慧
车 森,刘海砚,陈晓慧,葛 磊
(信息工程大学,郑州 450001)
房地一体是我国房屋所有权和土地使用权关系的描述,农村房地一体调查指的是对农村宅基地与房屋进行一体化调查。对测绘地理信息行业来说,房地一体旨在查清农村宅基地、集体建设用地及地上房屋的权属、位置、界址、用途等情况,建立农村房地一体权籍数据库。在房地一体项目中,主要测绘任务是农村地籍测量和房屋测量。借助精密仪器和科学方法,测量权属界线、界址、位置、形状、面积等实际信息,按照不动产证的要求形成一宗一档的成果材料,为土地登记提供依据。
1 房地一体项目测量常用方法
1.1 传统测量
传统的不动产测量通常采用GPS-RTK 结合全站仪的实地测量方法[1-2],在开展房地一体项目时,传统测量技术效率相对较低,人工作业劳动强度较大,存在隐蔽点难以量测、图根控制点不易保存、测量累计误差较大等问题,全站仪和RTK一次采集一个点,需要花费大量时间和人力来获取一个区域的信息。同时对控制点的布设密度、测量精度以及作业人员专注度都有一定要求。内业成图需要记录草图或现场照片才能较高效的处理数据成图。
1.2 倾斜摄影测量
基于无人机技术的倾斜航空摄影测量,可以快速自动生成实景三维模型[3-4],但为了满足房地一体测量平面中误差5 cm的精度需求,通常情况下1 km2范围需要布设约50个控制点,同时需要布设检查点,控制点如果布设太密,既浪费人力和物力,同时也会影响后期数据处理速度,控制点布设密度小于该值的话则会导致精度降低。而且控制点测量精度必须优于3 cm才能满足要求,需要多次测量取平均值,位置尽量选择较平坦的地面,尽量不要选择房屋角点或者高低不平的角点作为控制点,避免内业人员在刺点时发生误判导致数据精度不满足要求。另外,利用倾斜摄影方法构建的三维模型,在房屋密集地区,遮挡部分对模型影响较大,会出现拉花与变形,无法进行准确量测。这种情况还需要作业员利用仪器到实地补测,对项目的实施管理有更高要求。
1.3 激光测量
激光扫描技术近年来发展迅速,它能够直接快速地获取目标的表面三维信息[5],已经成为一种重要的三维空间数据获取手段,在测绘[6]、机器人[7]、无人驾驶[8]等领域得到广泛应用。SLAM (同步定位与制图技术)最早起源于机器人领域[9],指的是机器人从未知环境的未知地点出发,在运动过程中通过重复观测,利用得到的地图特征(墙角、柱子等)来定位自身的位置和姿态,然后再根据自身位置构建周围环境的增量式地图,从而可以达到同时定位和地图构建。基于激光雷达的SLAM(Lidar SLAM)采用2D或3D激光雷达,可以高效地获取室内或者室外场景的三维点云数据,近年来在测绘领域得到广泛应用[10-13]。
利用无人机载激光与SLAM扫描仪开展房地一体测量时,机载激光可以高效地采集屋顶、阁楼梯间和楼层等区域,SLAM扫描仪针对屋檐、棚户区域进行高效完整的采集。利用两者结合的方式,无需布置地面控制点,仅用机载的极少数控制点就能融合整体数据,倾斜摄影测量方式1 km2需要30个地面控制点,机载激光只需要3个点,在与SLAM的数据进行“拼接”后,对整体进行平移和旋转,不需要控制点转坐标。SLAM相对测量精度2~3 cm,以机载数据为基准进行融合匹配。
2 HERON LITE便携式移动测量系统
近年来,随着大型商场、地下矿井等室内及地下场景三维建模需求的增多,便携式移动激光扫描仪得到广泛应用,中海达子公司武汉海达数云技术有限公司推出的基于激光SLAM技术的 HERON LITE便携式移动测量系统,是室内建筑、小型基础设施、地下矿山和洞穴进行快速三维测量的理想选择。该系统可单人操作,无需初始化程序,且具备强大的专利SLAM算法,适应多种环境,有助于破解房地一体的行业弊端,填补三维激光扫描仪市场的空白[14 -15]。
文中利用HERON LITE便携式移动测量系统开展实验,其核心部件包括全景摄像机、激光扫描仪、惯性测量单元、伸缩杆、外部电源、控制板、HERON桌面(后处理)和重建软件(注册和特征提取),如图1所示。
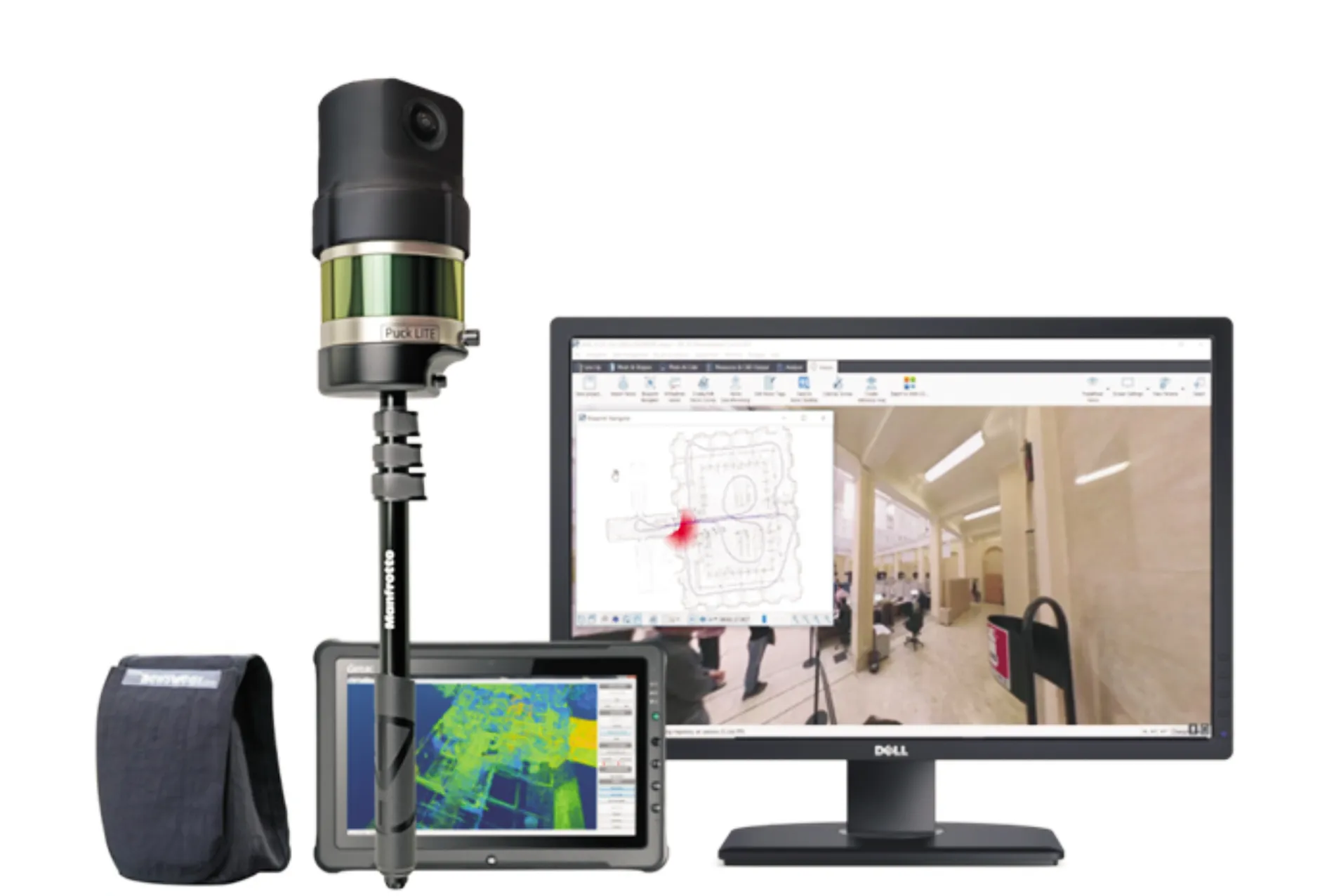
图1 HERON LITE便携式移动测量系统
该系统主要特点为:
1) 轻便自动,扫描仪重2.5 kg,操控平板重1.4 kg,操作简单方便,点云预处理时间短,自动化程度高。
2)测量复杂性低,工作量小,无需GPS信号,可灵活进入狭小空间采集数据,具有连贯性,实现室内外、地上地下一体化扫描作业。 采集无需初始化,采集轨迹无需闭环,即停即走。
3) 软件兼容性高,软件与国际多种主流工具兼容,支持DOM成果数据导入。
4)适应多种环境,长时间工作故障率低,可快速获得所需点云数据,数据精度高; 并可与固定测站式三维激光系统、机载三维激光系统配合使用,
3 房地一体测量应用
3.1 测图流程
文中选择实验区域隶属贵州榕江县某村与广州清远市某村,测区主体为农房,贵州山区地势起伏较大,广州区域地势大部分趋于平坦,地面要素主要为房屋、道路、高压线塔、农田等,测区总范围较广,但单个任务测区较小,文中在贵州区域采用无人机载激光与HERON LITE便携式扫描仪采集数据,广州区域只采用HERON LITE便携式扫描仪采集数据,主要任务是测量房屋的尺寸、占地面积,采集阳台、飘窗、围墙、猪圈等要素的位置,便于后期“办证”。测图流程如图2所示。
3.2 数据内业处理
1)数据解算阶段。数据解算使用HERON Desktop软件,它可以直接导入外业采集的点云数据,还具备点云加密处理、创建参考地图等功能。处理数据的时间与计算机的配置、扫描所需的时间有关。一般来说,求解时间约为扫描时间的1.5~2倍。点云数据的整体三维效果可以在重建预处理软件中查看,如图3所示。
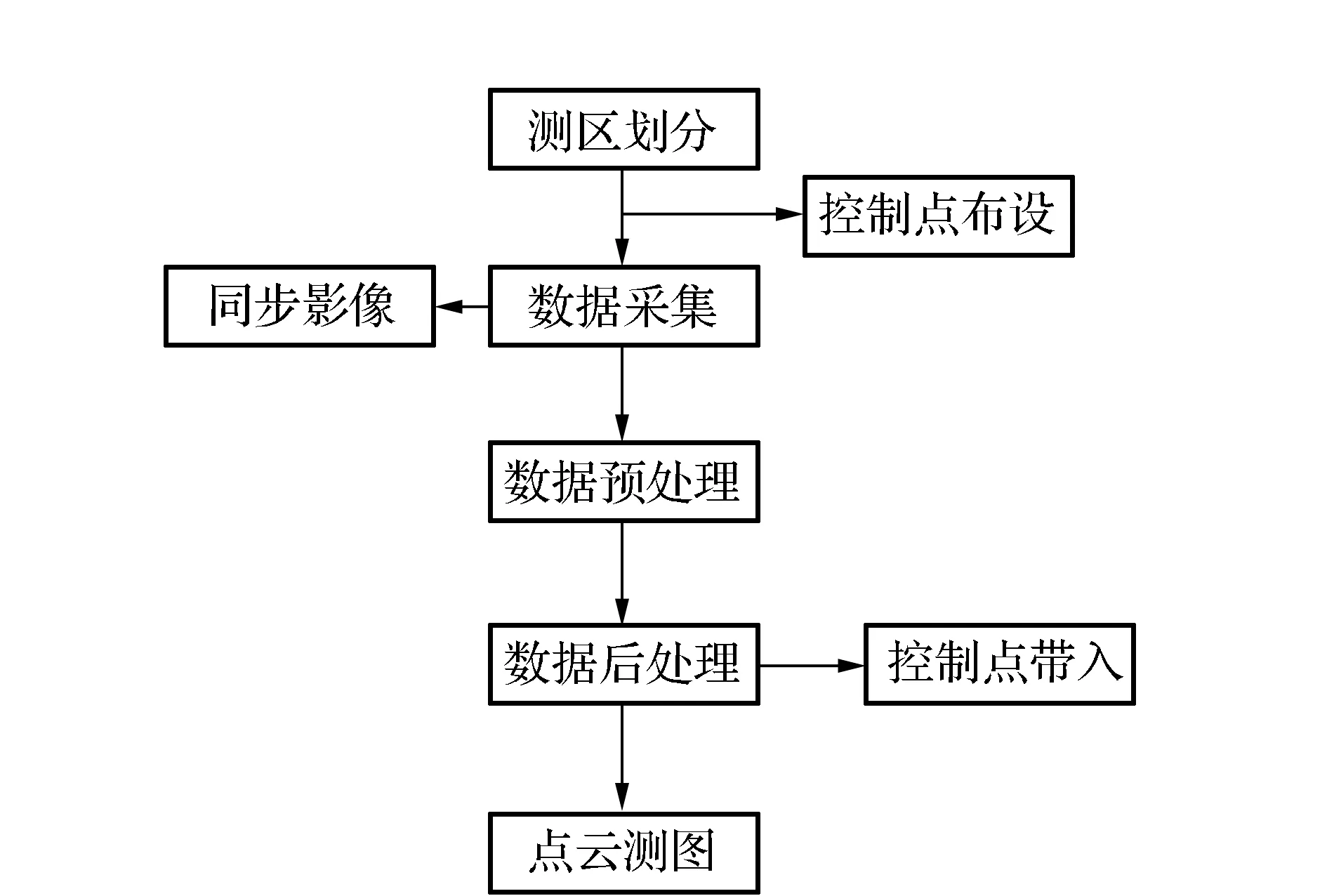
图2 房地一体测图流程
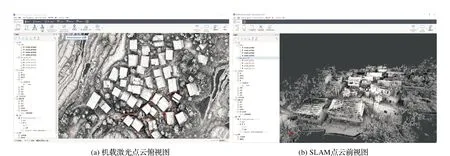
图3 外业点云显示效果
同一测点的外部点云可以由任何激光扫描仪仪器采集,并导入HERON桌面作为参考扫描,以便加快后处理进程和在HERON桌面中直接对数据进行地理参考并快速优化最终调查。
不仅控制点可以对项目进行地理参考,还可以扫描已进行地理参考的部分(也可以是地面扫描仪或者机载扫描仪的一部分),用作调整HERON LITE轨迹的约束。
2)数据后处理阶段。通过全自动预处理完成的点云数据可以直接导入重建软件进行拼接、坐标转换、切割和分割,简化后直接输出项目文件。
在测区内不同的平面位置处选取4个棱角分明的特征点,用RTK对这些控制点测出大地坐标值,利用这4个控制点,可以将整个点云数据进行坐标转换,如图4所示。
3)精度验证。文中通过全站仪验证点来验证激光坐标精度,文中选择部分扫描点位与实测点进行误差计算,得出点云精度分析报告,其精度满足房地一体测量要求,如表1所示。

表1 部分点位点云精度分析报告

续表1
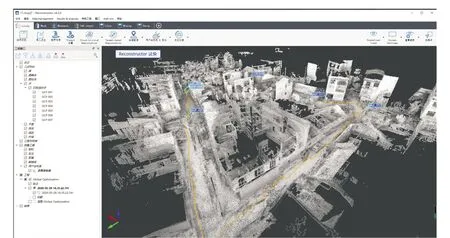
图4 利用控制点进行坐标转换
3.3 依据点云成图
经过后处理的点云数据可直接导入AUTOCAD软件进行三维测图,图5为CAD测图效果。
3.4 作业效率对比
表2为常用测量方法进行房地一体测量的效率对比,从表中可以看出,机载激光加SLAM扫描仪效率最高,采集效率可达120~150户/(人·d),而且所需控制点数量最少。此处的“户”统计的是广州清远市某村的数据,该地区房屋较为密集,每户面积约150 m2。

图5 依据点云测图效果
4 结束语
近年来随着SLAM技术迅速发展,激光SLAM在测绘领域得到广泛应用,文中介绍房地一体项目测量常用方法,分析其优缺点,并利用HERON LITE便携式移动测量系统开展房地一体测量实验,该系统不需要大规模布设像控点,减少外业工期,在某些无人机无法扫描的区域,可以进行补充,保证房屋墙面的完整性,提高数据精度。即便遮挡很严重无GNSS信号的区域,也可以通过SLAM算法采集房屋墙面,获得墙体位置。其配套制图软件符合CAD用户习惯,依据清晰点云,可以实现高效测图及符号化。
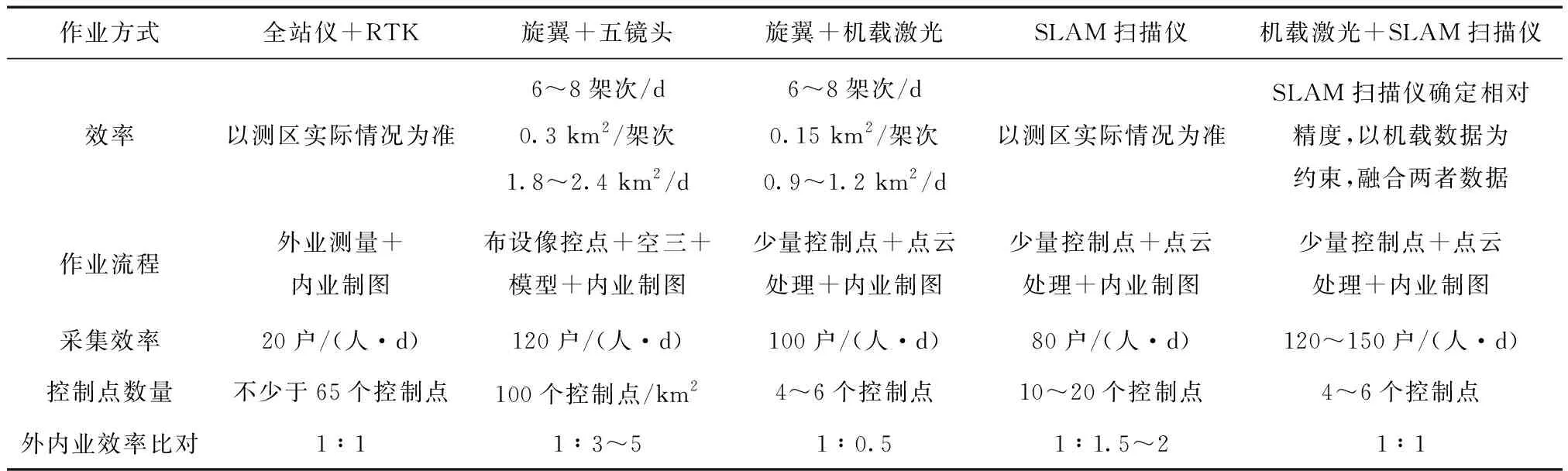
表2 不同作业方式效率对比
