基于逆向工程和拓扑优化的支座轻量化设计
2022-01-22殷劲松张鹏杨光
殷劲松,张鹏,杨光
(南京理工大学泰州科技学院,江苏泰州 225300)
0 引言
逆向工程主要是指在仅有产品实物的情况下,依次完成三维模型重建、结构再设计与制造的过程。逆向工程的关健技术包括数据采集、数据预处理、三角网格剖分、三维曲面模型重构、产品加工制造(如3D打印)等。数据采集是逆向工程的基础,采集点云数据的准确性对逆向建模有着直接的影响[1-2]。数据预处理、三角网格剖分、三维曲面模型重构是在数据采集的基础上识别产品结构几何特征、重构满足一定精度要求的三维模型的过程。在建立产品三维模型后,采用3D打印技术等制造工艺将产品制造出来。3D打印技术采用层层堆积原理,按照一定厚度对零件三维模型进行分层加工制造的工艺,在产品试生产中具有较好的优势。逆向工程不仅给产品设计制造带来较好的便利[3-6],更为重要的是可与结构优化设计技术相结合实现产品的轻量化设计与制造。传统的结构优化设计必须考虑到加工工艺的约束,确保优化后的产品能够以一定的成本被制造出来,避免出现“优化出来但造不出来”的情况,而3D打印技术的出现,较好地解决了这一问题,方便了产品轻量化设计[7-9]。本文以某支座为研究对象,基于逆向工程与拓扑优化技术完成了支座的轻量化设计。
1 逆向工程
首先通过三维扫描得到支座的点云数据,据此建立支座的三维结构模型。在扫描前需要完成表面处理和参考点粘贴,如图1(a)所示。同时为了能够获得尽可能多的点云数据,必须采用多视角扫描。在扫描过程中,不断地改变支座的摆放姿态,然后分别进行扫描,图1(b)~图1(d)给出了3种典型的位姿。

图1 支座的三维扫描
将多视角扫描的点云数据合并到一起,依次经过降噪、平滑及删除错误的点云后,构建起由三角形面片构成的支座高质量面片模型,并据此建立了支座三维模型,如图2所示。

图2 支座的逆向建模
2 拓扑优化
2.1 数学模型
以设计域中的单元密度为设计变量对支座进行拓扑优化,在满足应力约束和位移约束的同时,寻求最小的支座体积。目标函数和约束可以通过如下数学形式表达:

式中:ρ为设计变量;V为结构体积;F为载荷矢量;K为全局刚度矩阵;u为全局位移矢量;u*为位移约束;σ为von-Mises应力矢量;σ*为应力约束。采用固体各向同性材料惩罚模型,单元相对密度在0~1之间取值。为了避免计算奇异性,最小单元相对密度ρmin为0.001。此外,惩罚因子(p)大于1(一般情况下,p=3),从而将中间单元密度值引导到两个边界。每个单元的弹性模量按如下公式计算:

式中,E0是相对密度ρ为1时的弹性模量。
2.2 确定约束条件
通过支座静力仿真分析确定拓扑优化的约束条件。在支座静力仿真分析中,约束住底板上的4个耳孔中心点,载荷施加到支臂耳孔中心点,如图3所示。在表1给出的载荷和约束条件下,通过有限元分析得到了4种工况下支座的应力与位移云图(如图4),并将结果汇总于表2。

图3 支座有限元模型

图4 支座静力仿真分析结果
表1 支座的载荷和约束

表2 支座的最大位移和von-Mises应力
以表2中的分析结果为参考,设计优化的边界条件如下:

式中:σmax为支座的最大von-Mises应力;uy、uz为节点5沿y、z方向的位移。
2.3 支座的拓扑优化
确定支座优化设计域(如图5),并定义了最小构件厚度,据此进行支座结构拓扑优化设计。

图5 支座优化设计空间
图6~图7给出了最小构件厚度分别为4 mm、8 mm时的支座拓扑优化结果。

图6 最小厚度为4 mm的优化结果
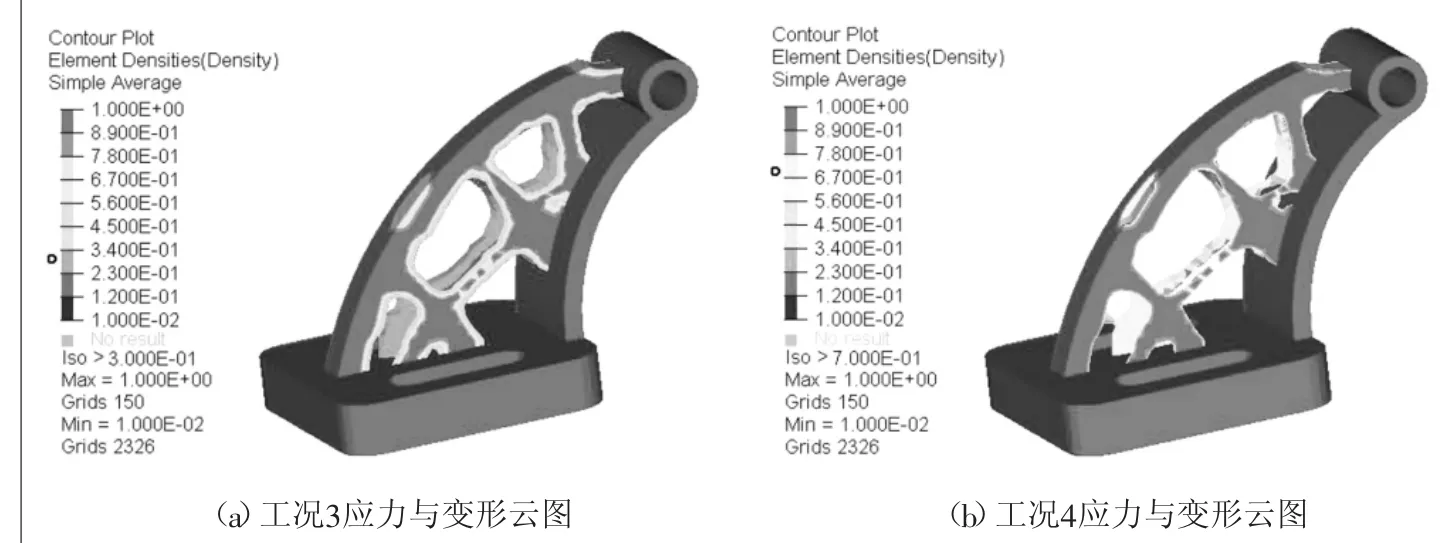
图7 最小厚度为8 mm的优化结果
优化目标的收敛曲线如图8所示,从图中可以看出,不同的最小厚度尺寸收敛速度不同。当最小厚度为4 mm时,迭代次数为39次,减重约为18.2%;当最小厚度为8 mm时,迭代次数为44次,减重约为17.5%。
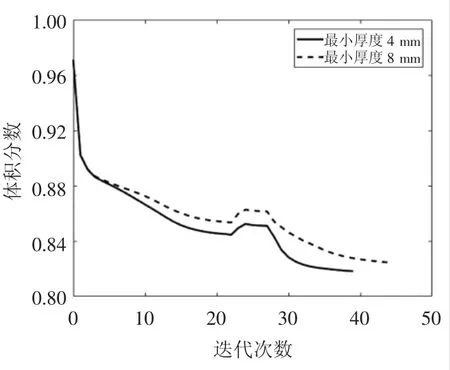
图8 优化目标收敛曲线
表3给出了具体的优化结果。从表3中可以看出,最小构件厚度为4 mm时,4种工况下的最大von-Mises应力为223.2 MPa,最大位移约为0.15 mm;最小构件厚度为8 mm时,4种工况下的最大von-Mises应力为224.9 MPa,最大位移约为0.15 mm,满足式(3)给定的约束条件。

表3 优化后的支座最大位移和von-Mises应力
3 结论
基于逆向工程技术建立起支座的三维模型,通过静力仿真分析得到了支座的受力与变形,并据此给出支座结构优化的约束条件,开展支座拓扑优化设计。研究结果表明:1)逆向工程与拓扑优化技术相结合有利于实现结构的轻量化设计;2)对于不同的最小构件厚度,优化目标的收敛速度不同,减重效果也存在一定的差异。
