基于Simulink的航天器姿态动力学仿真教学研究
2022-01-22王卫杰张雅声
王卫杰,张雅声,姚 红,任 元
(航天工程大学,北京 101416)
1 引言
航天工程大学是我军培养航天指挥管理与工程技术人才的摇篮。航天器姿态动力学是我校航天测发测控本科专业和航空宇航科学与技术学科研究生学员必修的专业课,是体现我校航天特色的主干课程。航天器姿态动力学主要研究刚体航天器绕其质心的转动规律,即航天器姿态在外力矩作用下的动力学和运动学特征。课程内容涵盖知识范围广、数学公式推导多、系统性逻辑性强,传统灌输式教学方法使得课堂教学较为枯燥、教学效果不够理想。如何在课程教学中,使学生在学习航天器姿态动力学基本内容的同时,能更深刻地领会和掌握所学知识的内在联系和应用效果,是课程教学过程中面临的难题。
仿真教学具有理论教学和物理实验的双重功能,有利于引导学员探究式学习,是当前教学改革的重要方向[1-4]。Simulink是Matlab中的一种可视化图形化模块化软件工具,集成动态系统建模、综合设计分析和虚拟现实仿真环境,广泛应用于线性非线性系统、控制理论及数字信号处理等教学科研领域。文献[5,6]结合通信原理课程内容实例,研究了Simulink通信系统仿真教学改革。文献[7]分析了Simulink在电力电子技术教学过程中动态比较、疑难解答、系统认知和实验拓展等方面的应用问题。文献[8,9]利用Simulink建立了电路系统虚拟实验平台。文献[10-12]分别探讨了Simulink在非线性系统、自动控制原理和理论力学教学中的应用模式。上述文献结合各自课程内容特点,验证了运用Simulink开展仿真教学的可行性和有效性。在航天器动力学相关的教学科研方面,文献[13]结合Simulink和VRML(Virtual Reality Modeling Language)语言设计了航天器轨道运动原理虚拟实验系统。文献[14-16]针对各自科研项目需求,从不同的侧重点搭建了Simulink航天器姿态控制仿真系统,但因专业性较强,难以适用于航天器姿态动力学的课程教学。
基于上述分析,结合航天器姿态动力学课程内容特点和教学需求,开展图形化可视化Simulink仿真教学研究。梳理课程内容体系,分析典型姿控系统自闭环回路特征,提出基于航天器姿控仿真教学系统的理论辅助教学和实验实践教学的教改思路。设计航天器姿控仿真教学系统总体方案,依据航天器姿态欧拉动力学和四元数运动学方程构建Simulink姿态运动模型,建立速率陀螺和反作用飞轮等典型姿控硬件模型,运用虚拟现实三维建模语言和Simulink/3D Animation工具阐明可视化姿态模拟的实现思路。搭建了反作用飞轮姿控Simulink仿真教学系统实例,通过姿态非线性微分方程数值解实时驱动下的动态立体姿控视觉效果,使学员以闭环交互方式获得课程内容学习的多重感知。
2 航天器姿态动力学课程分析
本课程以刚体动力学和控制工程知识为依据,紧紧围绕航天器姿态动力学、运动学和姿态控制软硬件等内容展开教学任务,是航天器飞行控制与在轨管理方向学员未来胜任岗位业务需求必须掌握的基本技能。
2.1 内容体系
航天器姿态动力学课程内容包括姿态运动理论和姿态控制大部分,如图2所示。其中,姿态运动是以动量矩定律为基础研究航天器在合外力矩作用下绕其质心运动的状态和性质,主要包括为航天器姿态欧拉动力学方程和四元数运动学方程。合外力矩是指控制力矩和空间扰动力矩的矢量和。空间扰动力矩来源于气动、重力梯度、太阳辐射和地磁等环境力矩,扰动力矩会引起航天器姿态发生变化。有些情况也可将扰动力矩作为姿态稳定力矩。
航天器姿态控制是在控制力矩作用下实现航天器姿态定向,包括姿态稳定和姿态机动两方面。前者是保持已有姿态,后者是从一个姿态到另一个姿态的转变。实现航天器姿态控制依赖于由姿态敏感器、控制执行机构和星载计算机等软硬件组成的姿控系统。其中,姿态敏感器主要包括星敏感器、太阳敏感器和速率陀螺等。姿态执行机构主要包括飞轮系统(细分为反作用飞轮、控制力矩陀螺、偏置动量矩轮等类型)、推力器和重力杆等装置。
2.2 课程特点
在课程内容的两大模块中,以欧拉动力学和四元数运动学为核心的姿态运动理论,其数学表现形式为多元非线性微分方程,描述对象为惯性系、星体系和轨道系等多种三维空间坐标系下的航天器时变姿态参数,具有很强的理论性。姿态控制部分则紧密结合工程应用,需要讲授诸多姿态控制软硬件。如何将上述抽象的理论知识和实际硬件算法有效结合,提高授课质量,是主讲教员必须思考的问题。
考虑到航天器姿控系统设计涉及课堂教学的全部内容,是对学员课程学习效果和实践能力的综合检验。笔者以此为突破口,探索课程仿真教学改革模式。
课程讲授的航天器姿控系统主要类型如表1所示,显然,各类姿控系统的区别在于航天器产生控制力矩的方法不同。被动式姿控系统因指向精度低且无姿态机动能力,主要用于早期航天器。主动式姿控系统的控制力矩来自于航天器上的能源。其中,推力器姿控系统因需消耗工质,影响航天器寿命且姿态控制精度有限,目前主要用于航天器轨道控制。现用航天器姿控系统主要为基于角动量交换的飞轮三轴姿态控制技术。
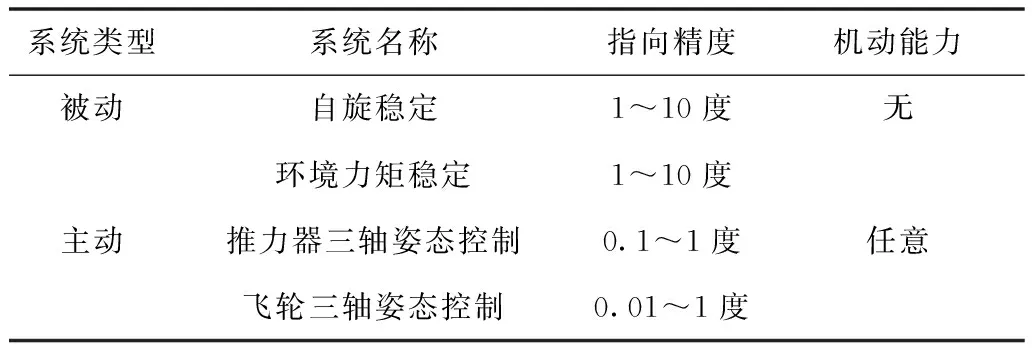
表1 航天器姿控系统类型
飞轮三轴姿控系统的显著特征是将课程主要内容串联成一个闭环回路,如图2所示,图中姿态控制器的功能是由星载计算机实现控制规律或控制对策,把姿态敏感器和执行机构联接起来,从而完成对航天器姿态的控制任务。姿态信息(姿态角和角速度)和力矩指令则成为连通姿控系统各组件的“血液”。
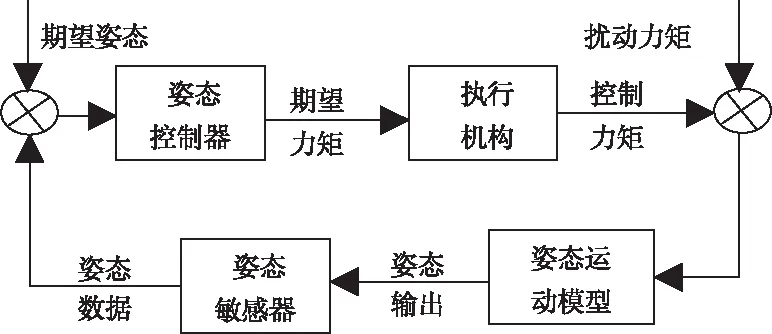
图2 航天器姿控系统回路
综上所述,为着眼提高学员综合素养,增强课程理论教学的直观性,突出航天器姿态控制的逻辑关系和控制效果,通过充分调研相关课程教学改革的有益实践,结合课程内容体系自闭环回路的特点,提出基于Simulink虚拟现实的姿态控制仿真系统教学方法,用于课堂理论辅助教学和课程实验实践教学。
3 Simulink仿真教学系统设计
Simulink作为一种建模与仿真软件工具,视觉上表现为方框图,数学上表征为微分或差分方程并用数值法加以求解,行为上模拟了物理硬件和算法软件功能。基于Simulink的仿真教学系统设计就是要构建集图形化数学模型、参数化姿态信息曲线、可视化姿态动态模拟等功能于一体的仿真教学系统,全方位展现航天器姿态运动学和动力学方程、姿态控制系统软硬件、姿态控制信息流、航天器姿态变化规律等课程教学重难点,夯实学员专业基础,启迪学员创新思维。仿真教学系统总统设计方案如图3所示,图中只列出了常用姿态控制执行机构和姿态敏感器。

图3 航天器姿控仿真教学系统总体方案
为与教学内容匹配,仿真教学系统的执行机构和敏感器有多种模型库,下文以反作用飞轮和速率陀螺为例给出系统建模方法。
3.1 姿态运动建模
姿态运动理论是课程理论性最强的部分,姿态运动建模也是实现仿真教学系统的基础。Simulink/Aerospace模块提供了坐标系变换函数、欧拉角和四元数等数学模型,可用于仿真分析航天器飞行动力学和运动学。
刚体航天器姿态欧拉动力学方程为

(1)
式中,J为航天器转动惯量,ω为星体坐标系相对于惯性坐标系的角速度在在星体坐标系下的分量,ω×为斜对称矩阵,Tc为控制力矩,Td为扰动力矩,二者构成合外力矩T。
式(1)是一组非线性微分方程式,难以获得解析解,利用Simulink数值法求解即能加深学员对问题的理解,还可增强学员实践能力。依据该式构建航天器Simulink动力学模型,如图4所示,输入为合外力矩T,输出为角速度ω。

图4 姿态动力学模型
航天器四元数姿态运动学方程为

(2)


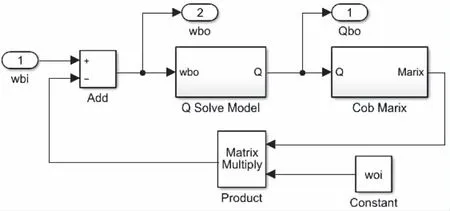
图5 四元数运动学模型
3.2 姿控硬件建模
速率陀螺敏感到的姿态信息含有陀螺噪声,该噪声分为白噪声和常值漂移两部分。考虑陀螺噪声的速率陀螺模型如图6所示,其中,White Noise模块用于生成随机白噪声Constant Drifting模块用于提供常值漂移,编码器Quantizer模块是为了体现陀螺精度。
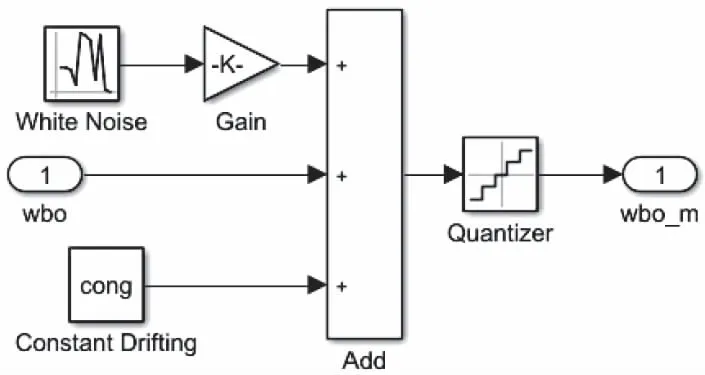
图6 角速率陀螺模型
反作用飞轮通过飞轮转速的改变输出控制器给予的期望力矩,飞轮固连在航天器上,由于陀螺进动效应,当星体以角速度ω转动时,还会产生陀螺力矩ω×hw,hw为飞轮动量矩,故反作用飞轮模型如图7所示,输入为控制信号Tu和角速度ω,输出为控制力矩Tc。
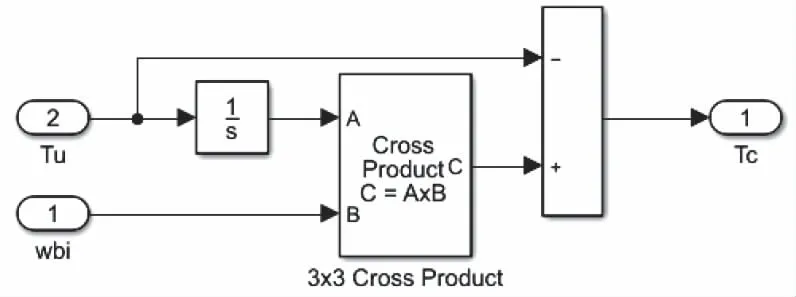
图7 反作用飞轮模型
3.2 可视化姿态模拟
为了将航天器姿态变化规律和控制效果动态立体的展示给学员,利用Matlab/Simulink虚拟现实技术构建航天器姿态三维可视化仿真模型。
在Matlab2017b中虚拟现实工具箱包括V-Realm Builder2三维建模工具和Simulink/3D Animation动画演示工具。3D Animation还集成有3D Player和3D World Editor两个子工具,前者用于播放3D Animation录制的动画,后者用于查看三维模型。
利用V-Realm Builder2实现三维航天器建模,其底层为虚拟现实建模语言(VRML)。Matlab提供了大量的三维模型库,为了提高效率,在现有模型基础上建立三维航天器模型,如图8所示,图中左侧树形列表中的center、rotation、scale、translation等参数,就是Simulink操控模型的数据接口。
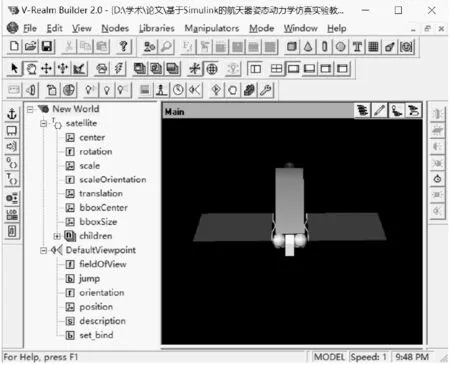
图8 三维航天器建模
航天器三维模型建好后,利用Simulink/3D Animation工具中的VR Sink模块将其集成进入仿真系统,因姿态运动是航天器绕其质心的转动,故选中参数rotation,如图9所示。

图9 VR Sink模型设置
以上就是Simulink姿控仿真教学系统的方案设计和建模流程。
4 教学应用实例
基于上述建模成果,针对反作用飞轮三轴姿态控制教学内容,搭建Simulink航天器姿态控制仿真教学系统,如图10所示,图中Dynamics和Kinematics为姿态欧拉动力学和四元数运动学模型,Gyro Sensor为速率陀螺、Flywheel为反作用飞轮,PD Controller为PD姿态控制器,Disturbance为扰动力矩,4个示波器Scope分别用于显示欧拉角、角速度、控制力矩和扰动力矩变化曲线,VR Sink为姿态可视化模拟模块。包括转动惯量J在内的初始参数通过m文件赋值。
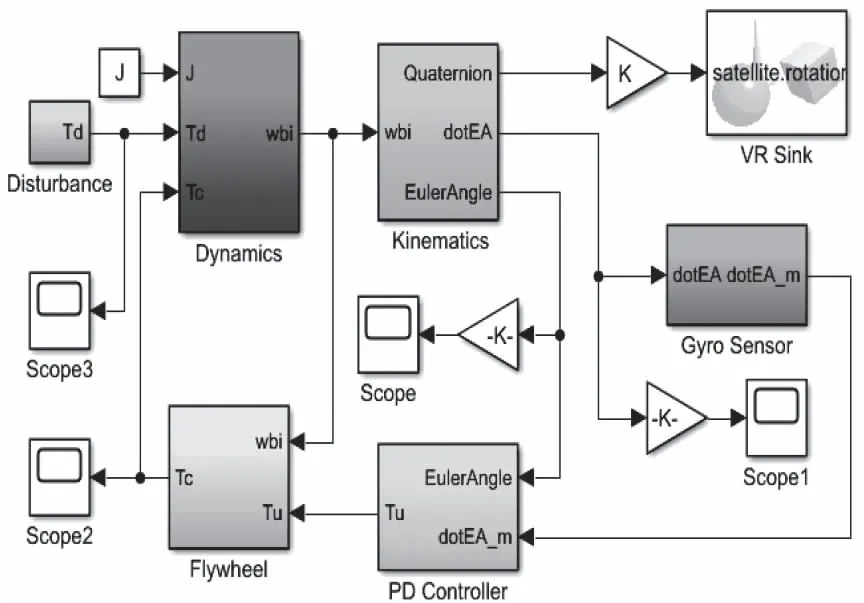
图10 Simulink姿控仿真教学系统
双击VR sink模块,打开3DAnimation虚拟现实动画演示窗口,如图11所示,点击图中三角形按钮启动整个仿真系统,航天器姿态则随仿真进程中姿态角的变化实时改变,实现可视化姿态机动模拟。
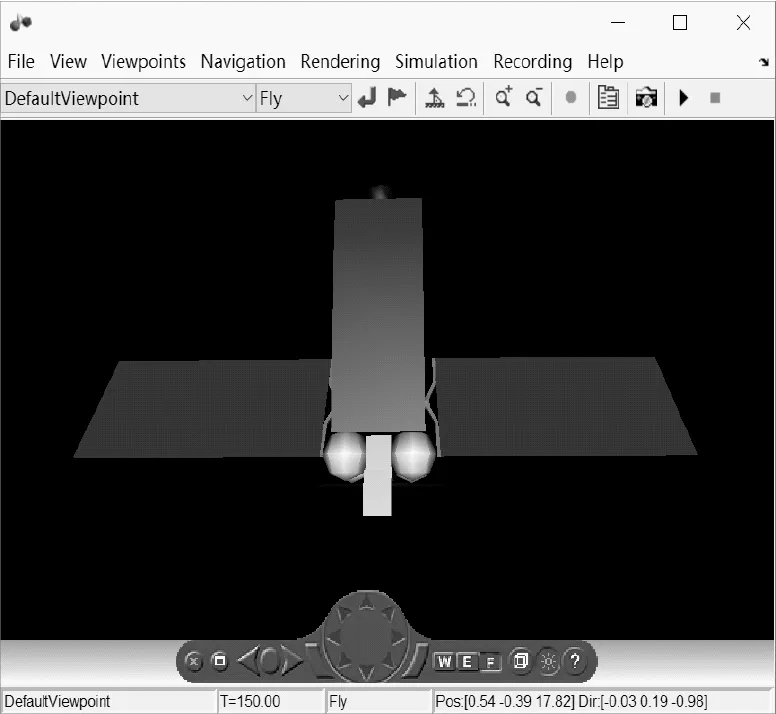
图11 可视化姿态机动模拟
双击打开Scope则可查看与图11对应的航天器姿态动态变化曲线,图12为欧拉角速度变化收敛曲线,亦可通过图中的三角形按钮启动仿真系统运行。

图12 欧拉角速度曲线
在课堂教学中,引入仿真教学系统,针对姿态运动理论内容,结合实验系统辅助教学,着重讲解数学推导过程和建模方法步骤,剖析非线性微分方程的数值求解方法,使学员明晰航天器姿态运动原理。针对姿控软硬件,运用实验实践教学法,学员可在现有实验系统的基础上,更换执行机构及其构型,调整初始参数,通过动态立体的视觉效果显示,理清姿控系统各组件模块间的逻辑关系。仿真教学系统的应用可使学员以闭环交互的方式获得课程内容学习的多重感知。
5 结论
针对航天器姿态动力学课程特点和教学需求,开展图形化可视化Simulink仿真教学研究。梳理了课程内容体系,分析了典型姿控系统的闭环回路特征,提出了基于航天器姿控仿真教学系统的理论辅助教学和实验实践教学的教改思路。设计了航天器Simulink姿控仿真教学系统总体方案,建立了姿态欧拉动力学、四元数运动学以及速率陀螺和反作用飞轮等典型姿控硬件的Simulink模型,运用虚拟现实三维建模语言和Simulink动画演示工具阐明了可视化姿态模拟的实现思路。搭建了反作用飞轮姿控Simulink仿真教学系统实例,该系统能够直观展示姿态运动非线性微分方程的数值求解方法以及解算数据实时驱动下的动态立体姿控视觉效果,使学员以闭环交互方式获得课程内容学习的多重感知,收到了良好教学效果。