顾及系统误差补偿的GNSS辅助光束法平差方法
2022-01-21亢玮
亢 玮
(北京天下图数据技术有限公司, 北京 100083)
0 引言
航空摄影测量技术是通过在飞行器上搭载航摄仪获取对地观测信息,而后结合影像处理方法达到对地测量的目的[1]。该技术的兴起解决了地理空间信息现势性捕捉的难题,也成了地形图生产的主要方法之一。摄影测量技术的核心是,利用具有重叠区域的影像对,恢复出航摄瞬间影像的空间位姿状态,完成从二维影像向三维空间的转换[2]。一直以来,恢复航拍瞬间影像的位姿参数需要依靠空中三角测量技术来完成,且为提高解算精度,往往需要借助布设在地面的大量控制点参与平差解算。但对于地震、泥石流、火灾等自然灾害评估救援,以及沙漠、森林、高山等地区,从时间和空间上不具备控制点布设条件[3]。因此,有必要探索降低航空摄影测量对控制点的依赖,达到减少或无须控制点参与的高精度测量水平。
近些年,全球导航卫星系统(Global Navigation Satellite System, GNSS)发展迅速,定位精度得到了极大提升,尤其差分GNSS技术,更是具备高精度动态定位优势[4]。将差分GNSS系统搭载在航摄平台上,在进行航摄时,即可输出影像的定位信息,以此为基础,配合GNSS辅助空中三角测量,即可有效降低平差过程对控制点数量的需求[5]。但我们知道,GNSS辅助光束法平差技术是将通过差分技术获取的影像曝光时刻投影中心的位置坐标作为观测值,一同纳入联合平差解算中,是一种空中布控的理念[6]。从目前研究来看,GNSS辅助空中三角测量虽然在一定程度上提升了模型解算精度,但在不采用地面控制点参与平差的前提下,仍不能达到满足制图的精度要求,即无法实现真正意义上的无控。国内外已有学者研究发现,差分天线安装的偏心误差和曝光延迟引起的延迟误差是制约GNSS辅助光束法平差精度的关键,这部分系统误差导致GNSS记录坐标与曝光时刻摄影中心的位置不一致[7]。因此,如何在平差过程消除偏心和延迟带来的系统误差影响是进一步提升测量精度的关键。本文将从偏心和曝光延迟误差产生机理出发,构建顾及系统误差补偿的光束法平差模型,消除系统误差对平差精度的影响,进一步拓展GNSS辅助光束法平差的应用范围。
1 传统GNSS辅助空中三角测量原理
1.1 差分GNSS定位原理
差分GNSS是指将架设在地面已知点上的接收机作为基准站,搭载在移动载体上的接收机作为流动站,两者在相同时段内接收同一组卫星信号,在一定基线范围内,基准站就可以将公共误差修正值通过无线电传输给移动站,实时获取移动载体的高精度坐标[8],如图1所示。
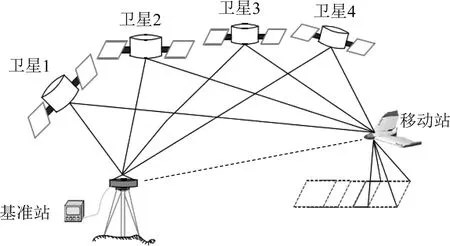
图1 差分GNSS测量原理
差分GNSS分为位置差分、伪距差分和载波相位差分,其中载波相位差分定位精度最高,可达厘米级,是辅助光束法平差的主要依据[9]。下面对载波相位差分GNSS原理进行简单介绍。


={fi[tr+dtr(tr)-t0]+φr,0,i]}-



(1)

(2)
式中,c表示信号传播速度;tr、ts分别表示接收机本机记录和所接收卫星信号的时间。采用载波相位模型实现差分解算主要包括三种方法,即单差、双差和三差,为提高解算的精度和鲁棒性,我们一般采用载波相位双差模型,即在t时,将不同卫星(i,j)对应的基准站与移动站之间的载波相位差分值再做一次差分,即:
(3)

当基准站与移动站同时观测多组卫星信号,即可列出多个误差表达式,在求解出整周模糊度后,将其代入观测方程中,进一步计算出移动站的位置坐标。
1.2 GNSS辅助空中三角测量模型
由图1知,经差分技术可以获取动态条件下移动站的精确位置,全球导航卫星系统(Global Navigation Satellite System,GNSS)辅助空中三角测量是指将摄站坐标作为观测值,参与到摄影测量平差模型当中,平差模型如下:
(4)
(5)

2 系统误差模型
2.1 偏心误差
如图2所示,受系统安装限制,GNSS天线相位中心A与航摄仪中心S之间存在位置偏差,致使经差分技术获取的点位坐标并非是摄影中心坐标,这部分误差会随着飞行姿态的变化,对辅助光束法平差精度产生加大影响。
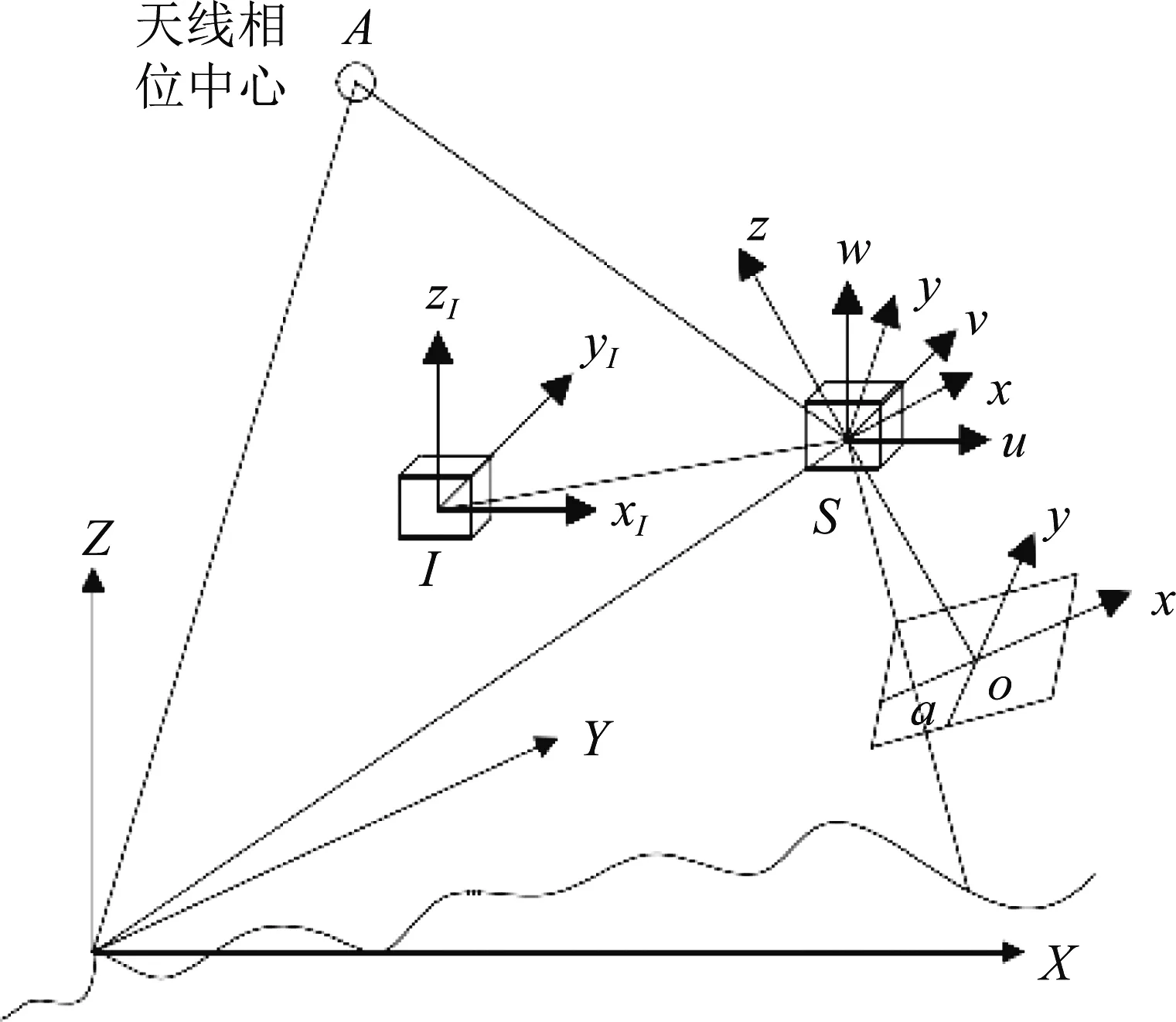
图2 航摄仪偏心误差
(6)

第四、医疗救助扶贫。贫困户参保人员由政府和医保基金出资为其参加大病保险,以及通过民政大病救助,实现贫困户大病治疗费用全部报销,缓解因病致贫,防止因病返贫。
2.2 曝光延迟误差
在航摄任务时,机载航摄仪采用的为定点曝光方式,即根据设定的航程点坐标,给定拍照指令,但对于相机而言,从接收信号到实际曝光存在一定的时间间隔。如图3所示,差分GNSS系统与相机之间不存在关联关系,致使差分GNSS系统记录的位置早于闪光灯曝光时刻。

图3 曝光延迟产生机理
若想较好地计算出曝光时刻的摄站坐标,需要模拟出差分GNSS获取的摄站位置与实际曝光时的摄站位置之间的位移矢量。利用微分思想,设每个延迟时间内,无人机为匀速飞行,则可以如下公式表示实际摄站坐标。
(7)

3 顾及系统误差补偿的GNSS辅助光束法平差模型
为解决传统辅助光束法平差精度低的问题,一般通过布设一定数量的地面控制点参与空中三角测量,这不仅会增加外业工作量,而且对于无法布控的场景,难以实现高精度对地观测[10]。本文充分考虑差分GNSS系统安装产生的偏心误差以及由飞控指令和相机曝光时间不一致而产生的延迟误差,在传统平差模型的基础上,构建了一种顾及系统误差补偿的辅助平差模型。
综合考虑偏心误差和曝光延迟误差影响,结合实际曝光时刻摄影中心和天线相位中心的位置关系,可以构建如下数学模型:
(8)
(9)
式中,[x,y,-f]T为地面目标成像点在像空间坐标系下的坐标;[X,Y,Z]T为像点在地面辅助坐标系下的坐标;λ为比例系数;R为影像三个角元素构成的投影矩阵。
4 实验与分析
4.1 实验数据
实验选取河南某城市的平坦地域,应用飞马F1000无人机,综合考虑测区的施测面积、范围及形状,按照航向重叠为65%;旁向以重叠为40%进行航线设计,POS数据为差分后处理所得,具体数据信息如表1所示,航摄区域范围如图4所示。
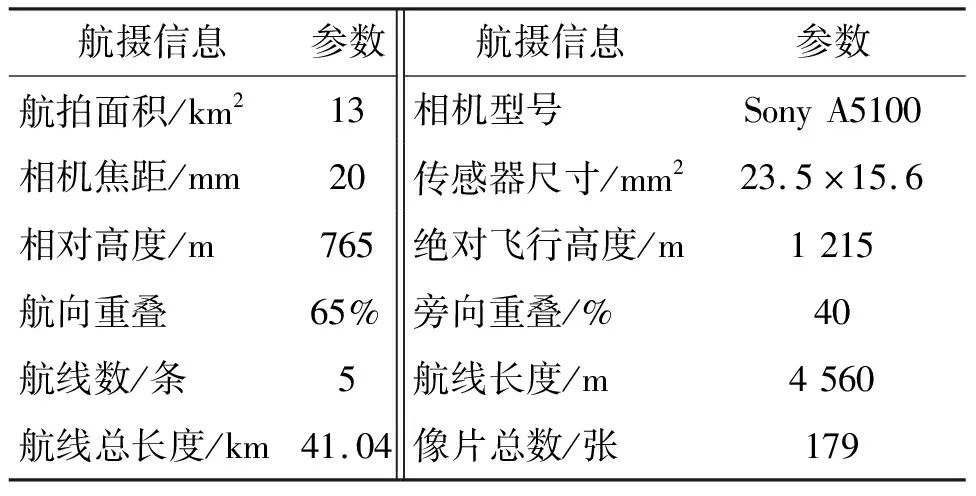
表1 无人机航摄实验数据信息

图4 航摄区域范围影像图
4.2 方案设计
为验证本文顾及系统误差补偿的GNSS辅助光束法平差的定位优势,以及对减少控制点数量的贡献程度,本文于地面布设了15个控制点,并设计了如下4种解算方案,如图5所示。
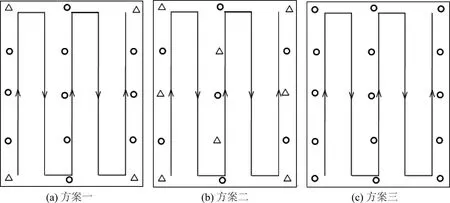
图5 不同方案的控制点布设情况
(1)采用传统光束法平差模型,将任务区4个角点的控制点设为像控点,其余控制点设为检查点,进行平差解算。
(2)采用传统光束法平差模型,选取任务区4个角点和任务区域内均匀布设的4个控制点设为像控点,其余控制点设为检查点,进行平差解算。
(3)采用本文顾及系统误差补偿的辅助光束法平差模型,将任务区内所有控制点均设为检查点,进行平差解算。
(4)采用本文顾及系统误差补偿的辅助光束法平差模型,控制点布设方案与方案一相同,进行平差解算。
4.3 数据处理与分析
本文应用Agisoft PhotoScan软件分别对以上4种方案下的航摄数据实施空中三角测量,经光束法平差解算,最终计算出地面点坐标、相片外方位元素和自检校参数等。解算流程如图6所示。
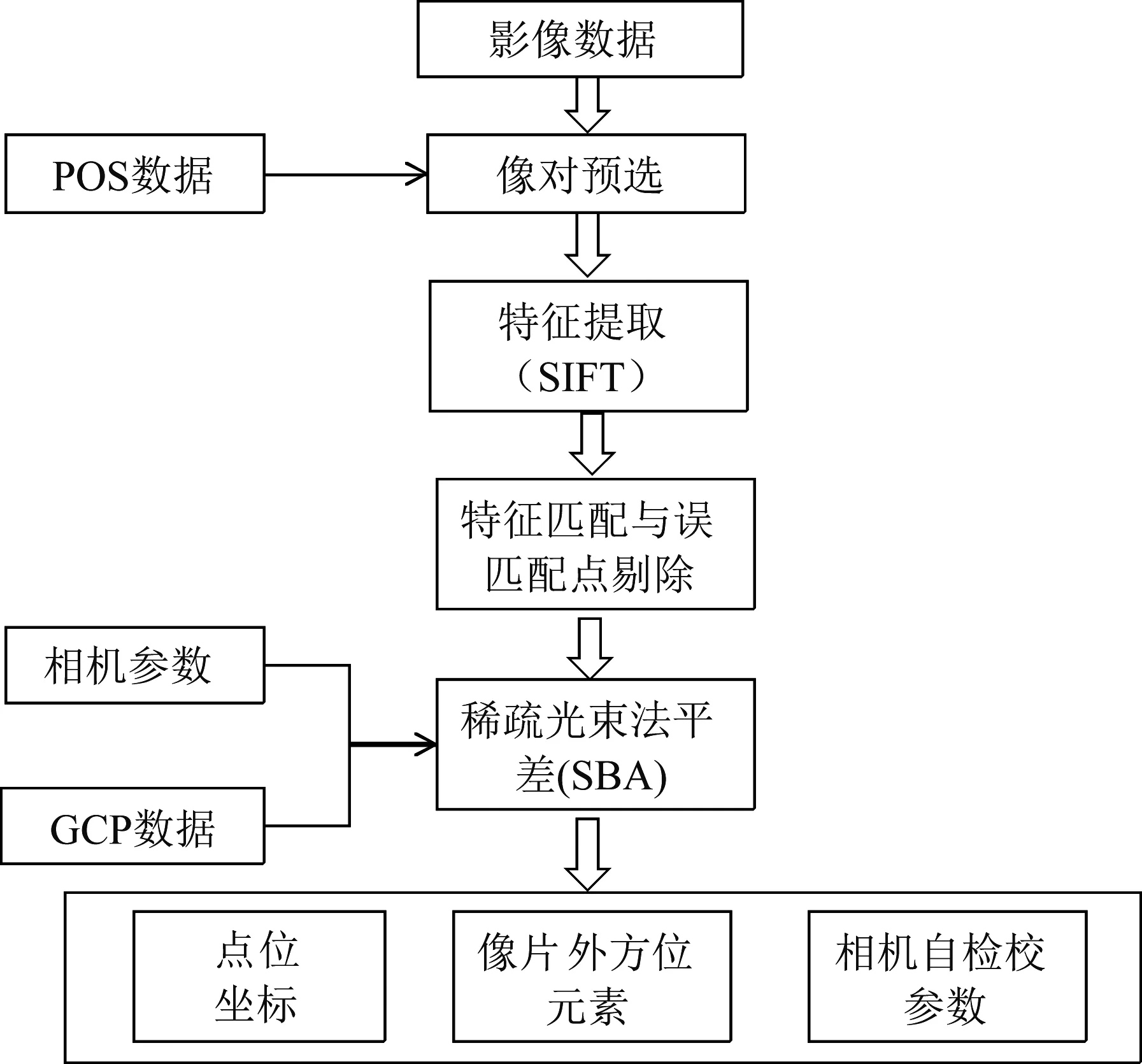
图6 空中三角测量流程

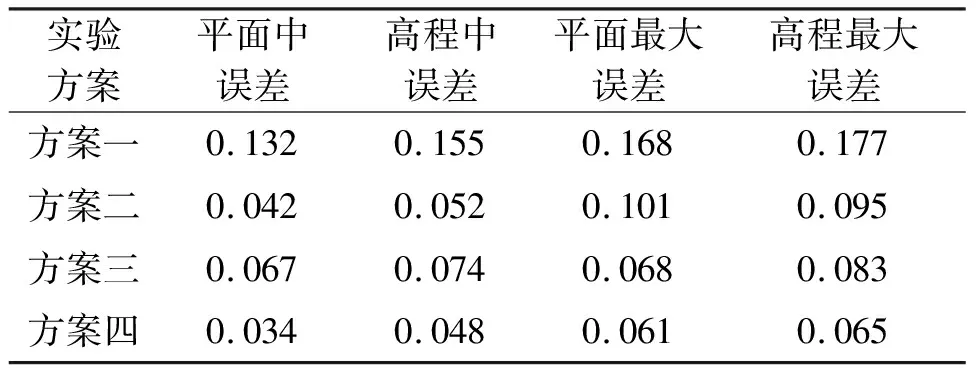
表2 不同方案检查点精度比较 单位:m
从计算结果可以看出,方案一、方案二采用传统光束法平差模型,检查点的定位精度及稳定性与控制点布设的数量密切相关,控制点布设数量越多,精度越高,稳定性越好;方案三、方案四采用本文顾及系统误差补偿的辅助光束法平差模型,检查点的定位精度及稳定性虽然可以随着控制点的引入而得到提高,但效果并不明显。比较方案一、方案二和方案三,得出本文顾及系统误差补偿的辅助光束法平差模型在不引入控制点参与平差时,同样可以取得较好的定位效果,甚至定位稳定性优于方案二引入大量地面控制点参与平差的对地定位。方案四无论在定位精度,还是稳定性上均具有较好的优势。因此,本文及系统误差补偿的辅助光束法平差模型配合少量的地面控制点可以发挥更好的工程应用价值。
5 结束语
鉴于传统GNSS辅助空中三角测量对系统误差缺少研究,致使定位精度较低,未能有效发挥差分GNSS系统定位优势。因此,本文充分考虑了偏心误差、曝光延迟误差的产生机理,结合实际设备安装和飞行状态,建立了相应的系统误差改正模型,并提出了一种顾及系统误差补偿的GNSS辅助光束法平差方法。经实验验证,本文方法能有效提高平差模型的解算精度和稳定性,大大降低传统空中三角测量模型对控制点的依赖,是应急测绘保障的有效选择。