煤矿辅助运输调度系统的层次颜色Petri网建模
2022-01-20曹春玲李梦雨张娜齐
曹春玲,李梦雨,张娜齐
(西安科技大学 机械工程学院,陕西 西安 710054)
煤炭企业生产过程中,辅助运输环节是保障企业正常运作必不可少的环节[1]。一套完整的辅助运输车辆调度系统是井下车辆高效安全运输的关键所在[2]。井下车辆调度系统作为一类典型的离散时间动态系统[3],如何构建一个仿真模型来模拟井下车辆实际运行过程以事先验证调度策略的正确性、安全性及高效性,并对调度系统基本性能作预测分析,是井下车辆运输管理的重要目标。
现阶段,国内外许多学者对井下车辆调度系统进行了研究。陆阳等[4]利用CPN (colored Petri net)tools对煤矿机车运输调度系统建立了层次颜色Petri网模型(hierarchical colored Petri net, HCPN),并基于此模型对调度系统进行了性质研究。李国强等[5]提出一种进路式联锁调度算法模型,并对其正确性和可靠性进行证明。Gu 等[6]基于自适应蚁群算法对地下矿井车辆调度问题进行研究。但这些研究大多针对矿井有轨车辆调度系统,无法应用于现阶段煤矿广泛使用的无轨车辆的运输与调度[7-8]。
本文以有轨车辆的运输调度策略为基础,提出一种新的适用于无轨运输车辆的调度策略,并利用层次颜色Petri网[9-12]对其进行建模,以期对调度系统的各项性能指标作出分析,为井下车辆调度管理提供便利,为企业提质增效作出贡献[13]。
1 车辆调度策略及调度规则
为提高井下辅助运输车辆运输效率,更好地掌握车辆动态运输行为,减少事故的发生,提出一种新的调度策略,表述如下。将井下运输路线分为若干小区段,车辆在接到运输任务后,调度系统为其规划运输路线及运输路线包含的所有区段。车辆在行驶过程中进入一个区段时,系统对当前区段进行锁定,并对运输路线所包含的下一个区段发出预占用申请;当预占用申请满足时,为其分配下一区段,车辆进入下一区段后解除当前区段的锁定[14]。
车辆的调度规则[15]如下。1) 占用申请:当车辆进入某个区段运行时,调度系统为其申请下一个区段;2) 主机联锁运算:当下一区段的占用申请抵达主机时,主机根据区段内有无其他车辆运行来判断该申请是否可以被满足;3) 占用申请满足:当下一区段道路情况满足运行条件时,系统同意占用申请并对相应的信号灯进行操作;4) 车辆异常运行情况的处理:当车辆发生诸如闯红灯、超车或运行路线错误等异常状况时,系统应变更区段信号灯并发出报警信号以阻止车辆继续运行直至故障解除。
2 调度系统的HCPN模型
为了更清楚地描述车辆在该调度策略下的运行过程并对调度系统的性能作出详细分析,采用层次颜色Petri网对该调度系统进行建模,模型主要描述车辆的装载和卸载的调度、车辆在行进过程中的调度以及运输任务的产生过程。
2.1 模型基本假定
假定在调度系统中,满足以下条件:1) 每辆车在煤矿井上和井下之间运行;2) 车辆遵守“入井车辆让行升井车辆”的原则在井下会车;3) 车辆的类型分为升井车辆(类型为X)和入井车辆(类型为Y);4) 辅助运输道路和信号灯的设计符合规范;5) 每辆车的运输容量是固定且相同的;6) 模型的时间以min为单位;7) 模型的运行过程中只考虑时间代价;8) 每个区段有且仅有一个标识可被申请。
2.2 模型的颜色类型
建模过程中使用到的模型颜色集及变量说明如表1所示。
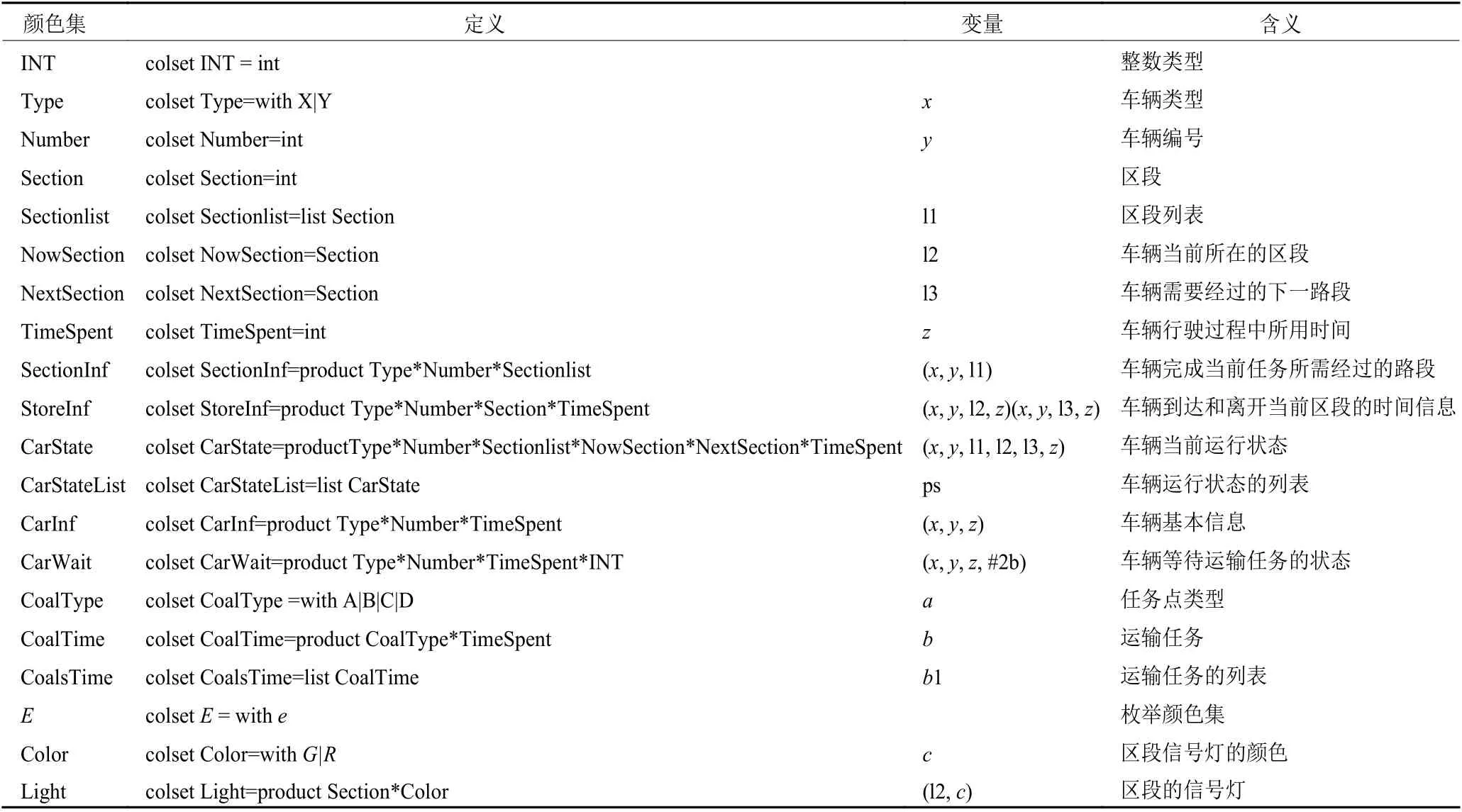
表1 模型的颜色集Table1 Color sets in model
建模过程中使用了3种时间函数,均服从指数分布,函数声明如表2所示。3种函数分别表示车辆装载货物所需的时间、车辆经过每个区段所需的时间和任务点产生运输任务所需的时间。另外,模型运行时长可任意取值,在本次模拟中取24 h。
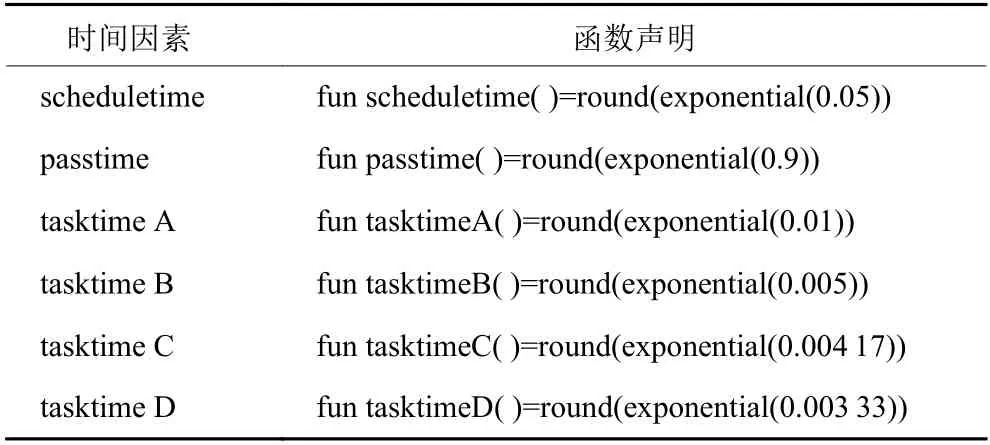
表2 模型的函数Table2 Functions in model
2.3 模型在CPN Tools的仿真图
图1~3是HCPN模型加上颜色集、弧函数以及初始托肯等之后的仿真图。表3~4所示为图中库所和变迁的含义说明。
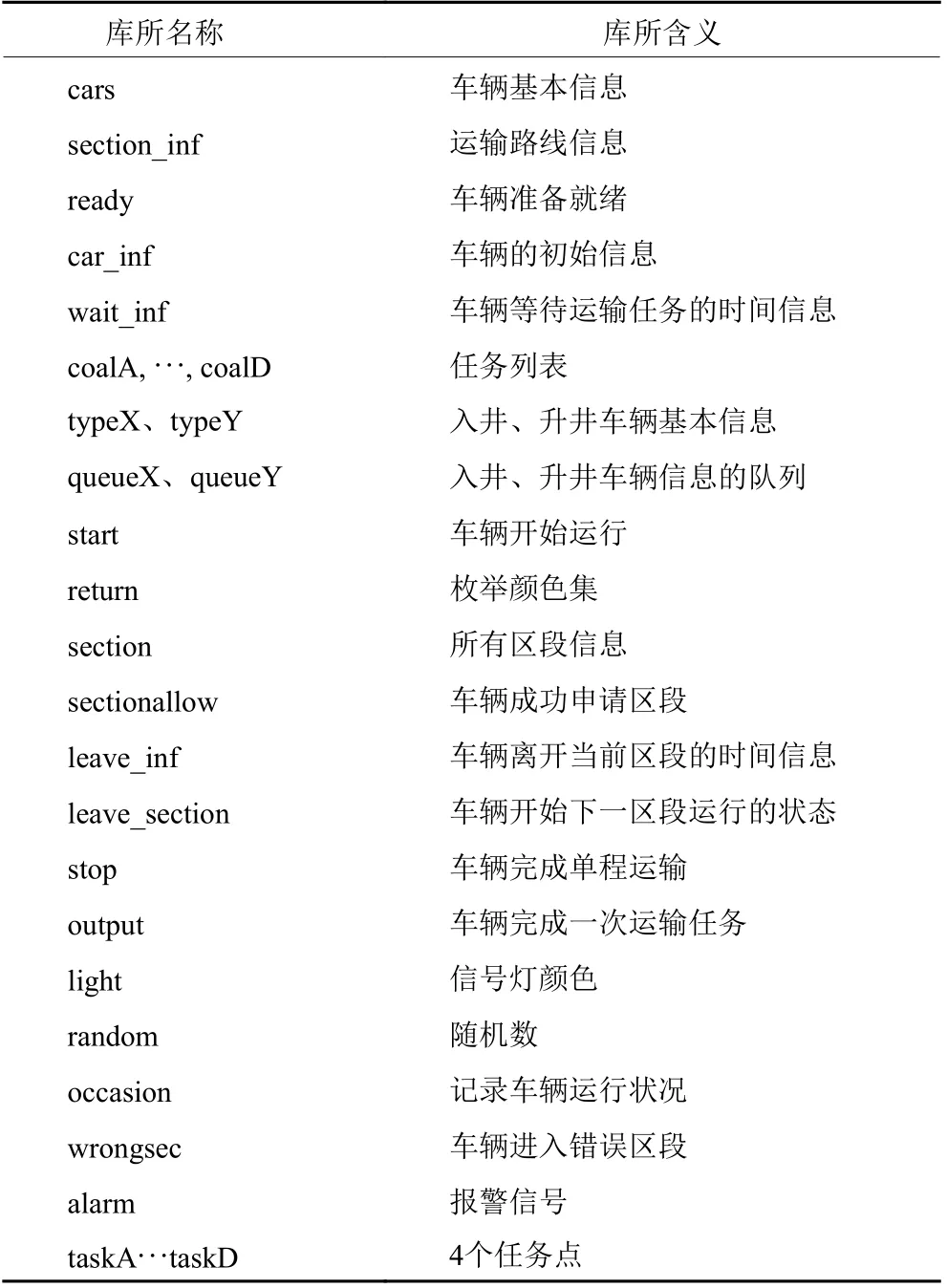
表3 模型库所说明Table3 Description of the model place
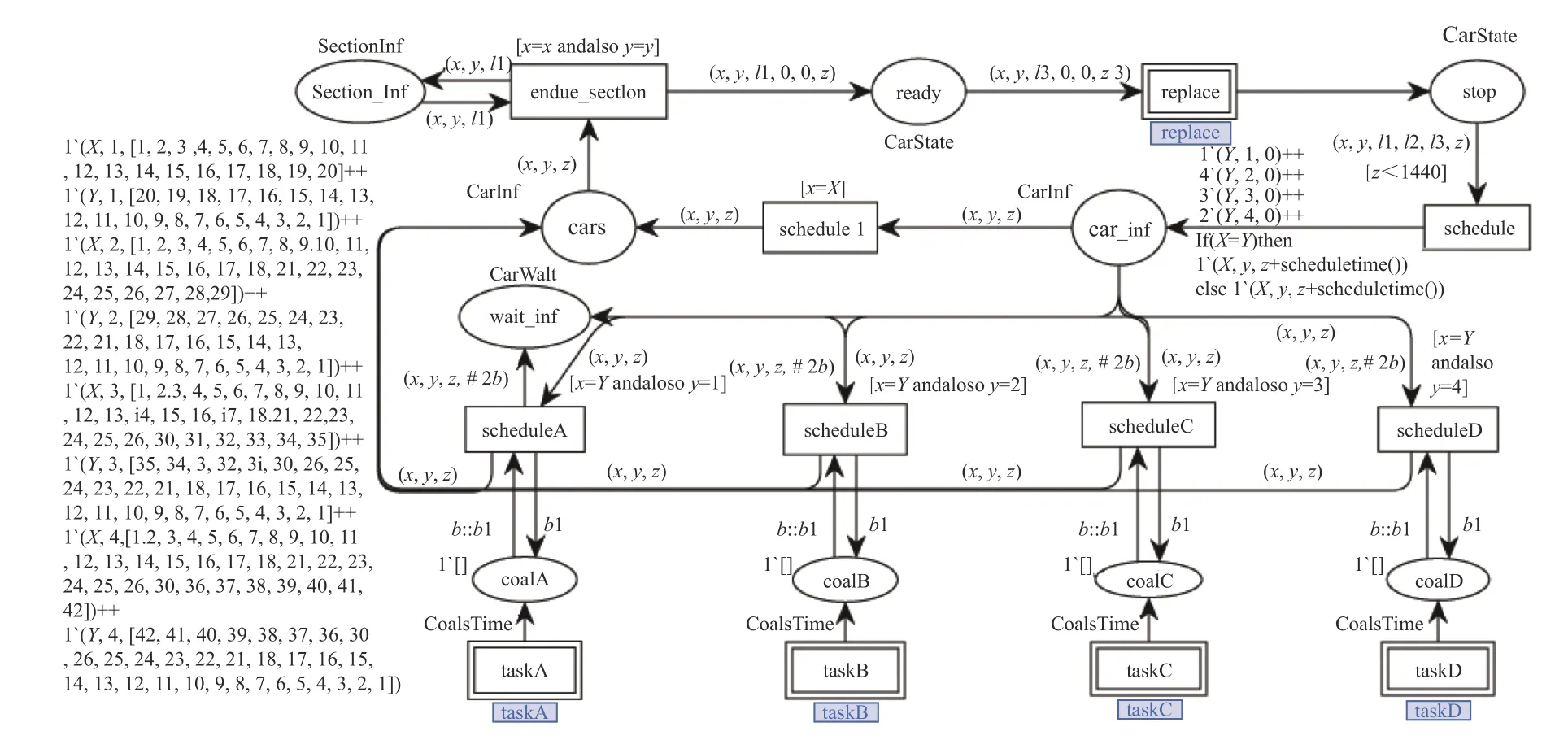
图1 整体模型框架Figure1 Framework of whole model
图1为整体模型框架,分别描述车辆在井上和任务点之间的调度过程,2个替代变迁task和replace分别表示各任务点的任务产生子模型和车辆运输调度子模型。图2为车辆的运输调度模型。车辆在行进的过程中遵守入井车辆让升井车辆先行的会车原则进行区段的申请及占用。入井车辆完成当前任务包含的所有区段后返回至顶层模型,得到升井路线后继续运行直至完成运输任务。如此往返,可保证井下辅助调度运输系统正常运转。此外,为了实现信号灯的管理,模型假定井下每个区段都设有信号灯,并将区段申请成功标志与信号灯的颜色联系起来,车辆成功申请区段后信号灯显示为绿色,其余时间均为红色。由统计规律可得,车辆在运行过程中发生意外情况的概率服从随机分布,本次建模过程中假定此概率取值为0.05%。当车辆在某个区段发生意外情况时,调度系统会强制变更该区段信号灯的颜色并发出报警信号,调度员收到报警信号后,可以手动调度发生意外情况的车辆,以解除故障使调度系统恢复正常运行。图3表示任务产生模型,产生的任务以队列的形式存储。
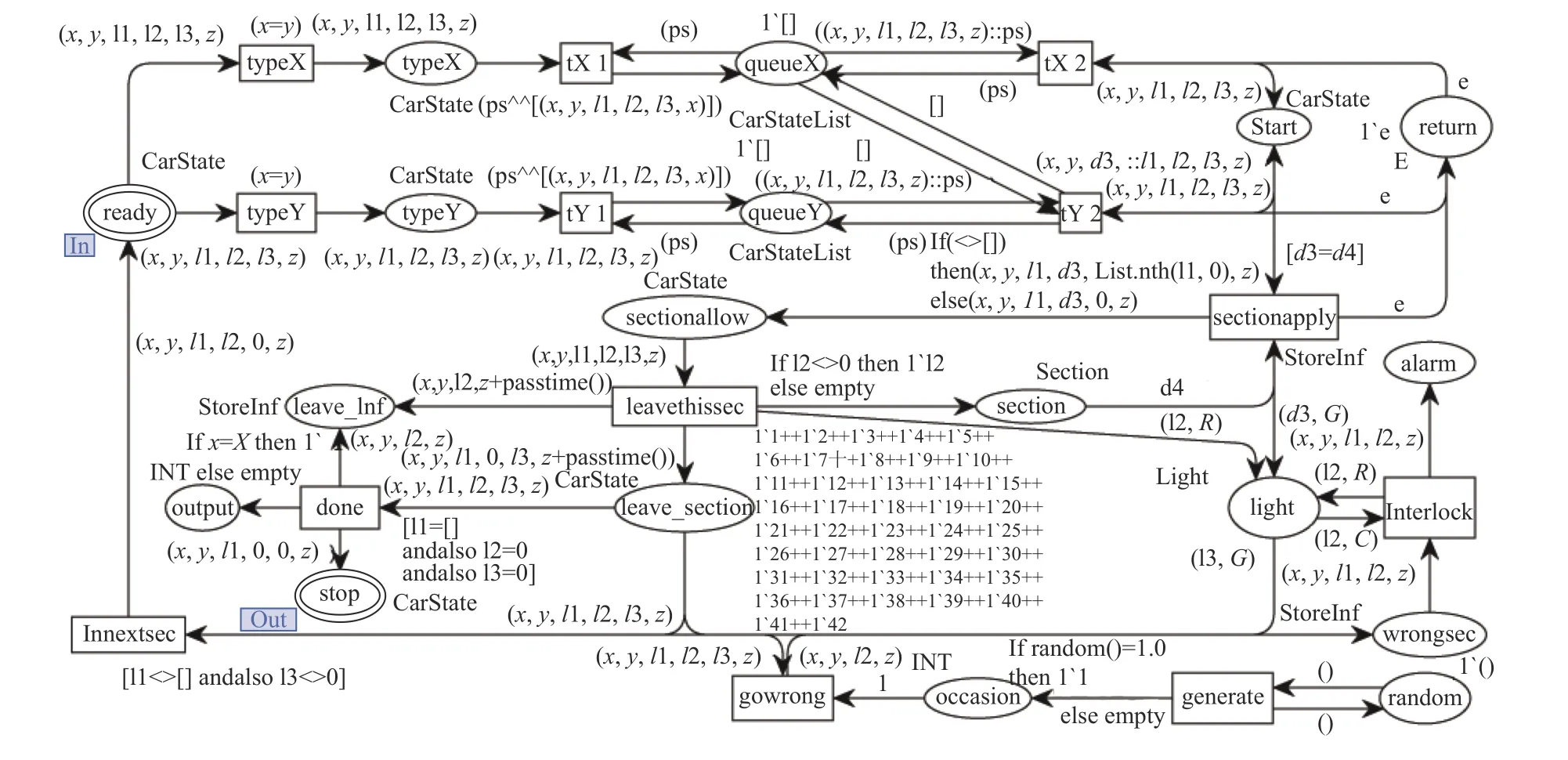
图2 车辆的运输调度模型Figure2 Vehicle transportation scheduling model

图3 任务产生模型Figure3 Task generation model
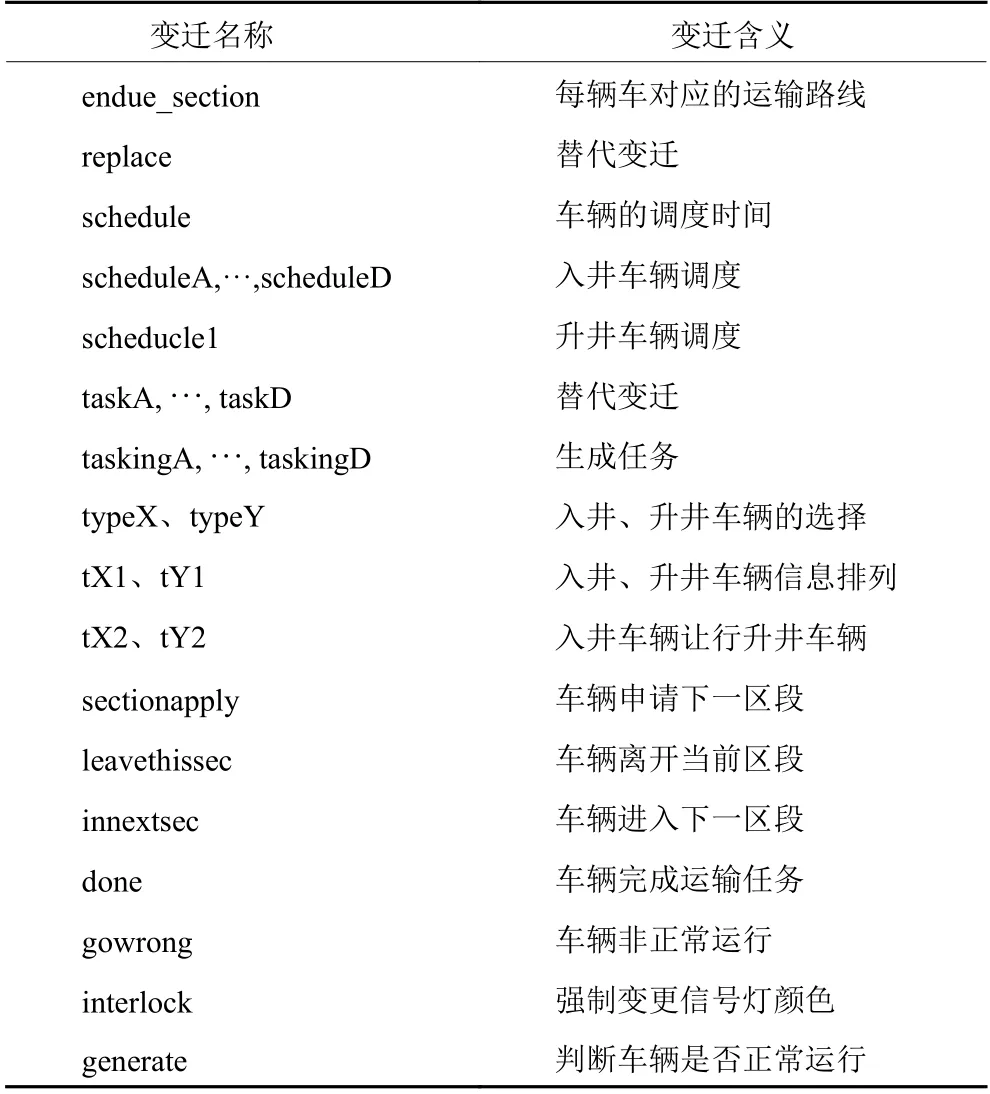
表4 模型变迁说明Table4 Description of the model transition
2.4 模型所需的初始数据
模型需要的初始化数据如下:
1) 库所car_inf,表示车辆基本信息;
2) 库所section_inf,表示每条运输路线包含的所有区段;
3) 库所section,表示所有区段的信息;
4) 任务产生时间、区段通过时间及车辆调度时间分别为tasktime、passtime和scheduletime。
3 调度模型的性能分析
以图4所示的Z煤矿辅助运输路线简图为例,在CPN tools中对调度系统进行仿真模拟,并利用模型输出的状态空间报告对调度系统作性能分析。图中1~42代表区段编号,A、B、C、D为4个任务点的编号,42201、42202、42203、42114为井下各工作面的编号。表5为按任务点类型设定的4类车辆运输任务表。在模型的实际应用中,可以把每个区段均设置为任务点,并为其规划路线输入至模型内保存,可有效应对随机任务的产生,为决策者规划运输任务提供便利。

图4 Z煤矿辅助运输车辆路线简图Figure4 Z coal mine auxiliary transportation vehicle route diagram
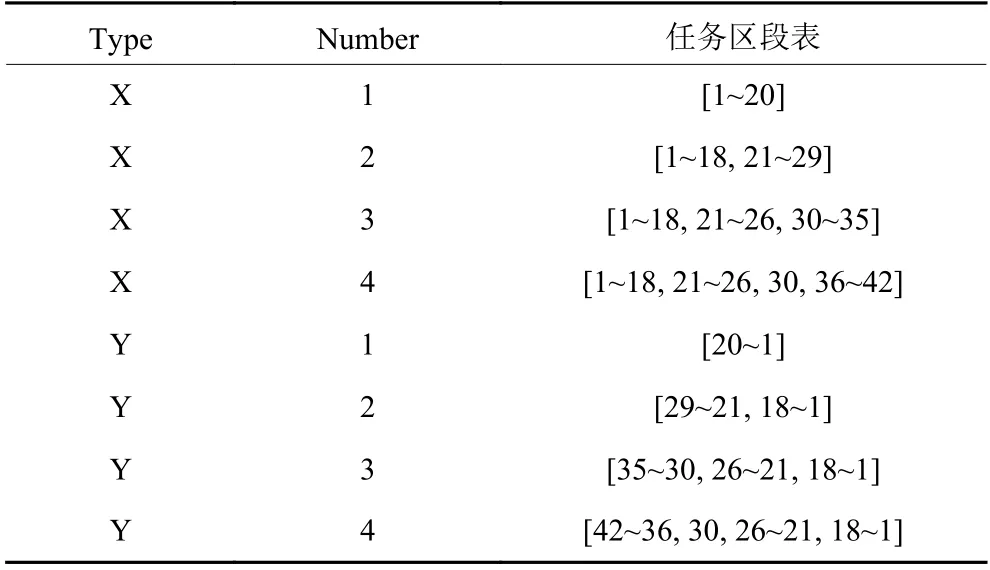
表5 Z煤矿辅助运输车辆运行路线区段设置Table5 Z coal mine auxiliary transportation vehicle operation route section setting
3.1 调度系统模型的安全性分析
从模型仿真图可以看出,车辆整个运行过程都在调度系统的监控之下,即使有车辆发生闯红灯或者误入错误区段等意外情况,库所alarm也会发出报警信号使错误车辆依旧在监控范围内。所以,无论是正确行车还是错误行车,系统都能检测到相应的车辆状态,由此可以证明车辆的调度系统是安全的。
3.2 调度系统模型的正确性分析
车辆在调度系统模型中运行时会对模型中的各个初始标识进行申请及占用,且能在使用完成后正确地将标识归还至对应库所。同时,调度员也可以通过手动修改库所alarm的标识来解决车辆发生意外情况的问题,使系统中的车辆保持正常运行。此外,模型的实际模拟运行过程及运行后生成的状态空间报告均可对调度系统的正确性进行验证。由此可以说明车辆的调度系统是正确的。
3.3 调度系统的可重用性分析
车辆的调度策略以车辆的状态变化为基础,所以调度系统模型只与调度策略有关,而与井下辅助运输线路图、车辆数量、任务点的位置以及运输任务产生的速度等无关,所以当上述因素改变时,建立的调度系统HCPN模型无需作任何变化,而只需要将模型的初始标识进行改动即可。
3.4 调度系统模型的性能分析及评价
以24 h作为模拟长度,对上述调度系统HCPN模型进行性能分析,主要包括以下内容。
1) 调度系统运输量分析。调度系统模型运行过程中库所output的标识图信息反映了车辆完成运输任务的次数。此次模拟结束后该库所有35个最终标识,即该调度系统中的所有车辆一天可完成35次运输任务。
2) 区段使用频度及时间分布的分析。调度系统模型运行过程中库所leave_inf的标识图信息反映了车辆每次经过某区段的时间信息,如图5所示。从图5可以看出,车辆到达区段1~18的次数最多,分布最密集,使用时存在车辆申请冲突的可能性最大。
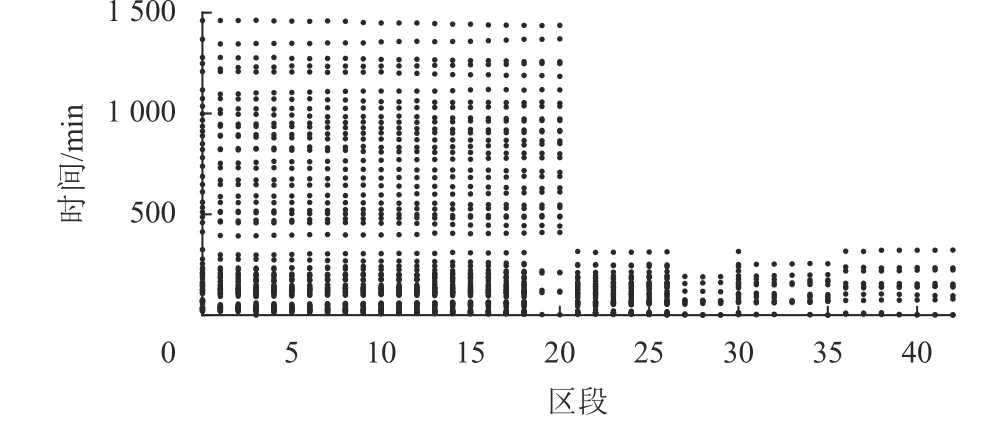
图5 区段的使用频率Figure5 Frequency of use of sections
3) 车辆运输速度与运输任务产生速度的匹配程度分析。利用调度系统模型运行过程中库所wait_inf的标识图信息可以计算车辆在调度过程中的等待时间,用waittime表示车辆等待时间并定义waittime =#2taskpointtime−z3。当waittime>0说明任务的生成速度慢于车辆的运输速度;waittime = 0说明任务的生成速度与车辆的运输速度基本匹配;waittime<0说明任务的生成速度快于车辆运输速度。调度员可通过调节车辆数量和运输任务的生成速度使两者匹配以达到提升效率的目的。
模型运行1 440个单位时间后,车辆在每个任务点的等待时间分布如图6所示。从图中可以看出A、B、C、D 4个任务点车辆等待时间的具体分布信息。A点负值略多,说明车辆运输速度稍慢于任务生成速度;而B、C、D任务点均为正值,说明车辆运输速度快于任务生成速度。运输任务的生成速度和车辆的运输速度的匹配性分析还可以通过任务产生子模型的状态标识图得到反映。模型运行结束后,子模型的剩余标识如表6所示。A任务点还剩下两个未运行的任务,而B、C、D任务点均无剩余,从而验证了A任务点的车辆运输速度低于任务生成速度,B、C、D任务点的运输速度快于任务生成速度的结论。
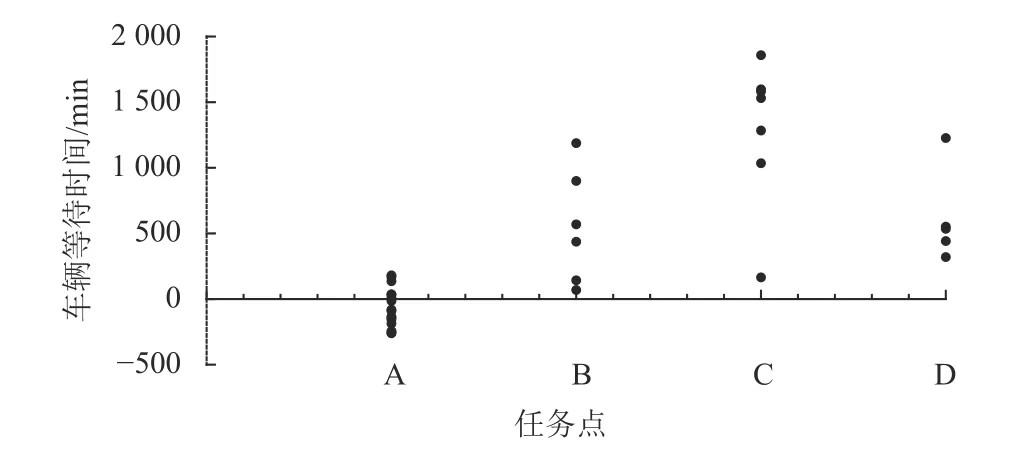
图6 车辆在任务点的等待时间Figure6 Vehicle waiting time at the task point

表6 模拟结束后剩余的运输量Table6 The remaining transportation volume after the simulation
4 结论
本文提出一种适用于井下无轨辅助运输车辆的新型调度策略,利用CPN tools的分层建模工具建立了基于此调度策略的调度系统仿真模型。通过研究模型运行过程及运行结束后输出的状态空间报告对调度系统模型的安全性、正确性及可重用性进行了证明,同时得出了该调度系统模型的基本性能。研究结果表明,该模型适用于煤矿井下无轨运输车辆的调度,应用过程中可有效应对随机运输任务的产生,提高矿井无轨运输车辆的运输安全性,同时可以辅助管理决策者制定生产计划,提高企业整体经济收益。
今后的研究中,可以考虑加入除时间以外的其他代价函数以丰富模型结构,对调度系统作更多层次的性能分析。
