激光分束及高精度指向调节系统
2022-01-20王章军黄文涛张锋李先欣程学武于洋薛博洋陈超
王章军,黄文涛,张锋,李先欣,程学武,于洋,薛博洋,陈超
激光分束及高精度指向调节系统
王章军1*,黄文涛2,张锋1,李先欣1,程学武3,于洋1,薛博洋1,陈超1
(1.齐鲁工业大学(山东省科学院) 山东省科学院海洋仪器仪表研究所,山东 青岛 266100;2.中国极地研究中心,上海 200120;3.中国科学院 精密测量科学与技术创新研究院,湖北 武汉 430000)
设计了一种三方向激光分束及高精度指向调节系统,适用于钠荧光多普勒激光雷达高精度的激光光束方向指向控制,以便激光雷达在长距离观测的情况下实现信号的迅速、精确获取。根据光学系统的设计要求,阐述了用于高脉冲能量分束镜、反射镜的光学物理特性以及控制反射镜负载、方向应有的机械特性;采用6个高精度的步进电机结合6个高精度光学二维调节镜架能实现1.18°的角度行程,调节精度可达1.1',且重复定位成功率达99.3%,实验结果满足高能激光发射系统对控制反射镜的精度要求;测试分束后的激光能量损失为11.6%,满足钠荧光多普勒激光雷达的激光能量发射要求。并编写了一套用于激光雷达分束及高精度指向调节系统的控制软件,实现了系统的远程自动化控制。
激光雷达;三分束;能量损失;高精度;自动化控制
1 引 言
激光雷达是一种现代化光学遥感探测设备,它集激光技术、光学技术和微弱信号探测技术于一体,与传统雷达相比,激光雷达具有高精度、远距离测量、强抗干扰能力等特性,被广泛应用于环境监测、通信、导航和定位等领域[1-2]。
中高层大气一直以来都是探测的盲区,该区域对于研究和了解空间天气以及大气/空间的相互作用非常重要,是近年来倍受空间科学研究和近地空间飞行关注的空域。普通探测器无法对这一区域进行有效探测,对于这一区域的大气探测,利用中层顶区域金属原子层的共振荧光开展激光雷达探测是当前国际前沿技术。钠荧光多普勒激光雷达利用这一原理能够同时探测80~110 km处的温度、风场以及金属原子浓度的垂直廓线[3]。2019年,中国南极中山站成功布设了钠荧光多普勒激光雷达,标志着中国在南极大气探测研究方面取得了关键性的技术突破[4]。
钠荧光多普勒激光雷达进行高空信号探测时,激光与望远镜视场角偏差1°会引起100公里处的激光水平偏差1.75公里[5-6]。望远镜视场角为0.5 mrad,系统在100 km处的观测直径为50 m,因此发射的激光仅需在这一范围内调节就可满足系统需求。然而,在远距离观测的情况下系统受环境影响比较大,在温差达50 ℃的环境中发射系统材料的热胀冷缩会直接影响信号的强度,需要定期地进行人为干预来调节和优化信号,此过程费时耗力。为了满足激光雷达测量中高层大气三维风场的要求,激光雷达发射系统要能够同时在3个方向(比如竖直、南向和西向)发射高能量脉冲激光束,并能实现这3束光方向的高精度调节,因此在激光雷达中引入3方向光束分束及高精度指向调节控制系统可以提高观测信号的质量,节约时间,并减少误操作对人眼造成的伤害[7-8]。
本文根据激光分束及高精度指向调节系统的使用环境和性能要求,对系统的光学器件、驱动装置及镜架结构等关键部分进行了研究,为钠荧光多普勒激光雷达在南极等极端环境的部署提供了技术支持。
2 系统设计
2.1 光路设计
为了获得中高层大气中的温度、风场和钠密度的三维信息,系统需要将高能量的脉冲激光分成三束能量均等的激光分别发射到垂直向、南向和西向,其中南向和西向的仰角为60°,如图1所示。激光源为589 nm高能量的脉冲激光,激光产生后经两次反射镜(M0,M1)反射进入光路,光路中共有5片同型号高反射率反射镜。分束镜可将入射光按比例分成反射光和透射光两部分,其中分束镜BS2反射50%的激光能量、透射50%的激光能量,分束镜BS1反射70%的激光能量、透射30%的激光能量。分束镜BS1的底座具有电动调节功能,必要时可将它移出光路,从而实现三光束发射和单光束发射的切换,此功能可在信号调试时实现大能量单光束的发射,获得更好的单向信号。当光路中添加光透反率为30∶70的BS1时,激光被分为两束,其中30%的光通过BS1经M2反射后垂直射向天空,70%的激光被反射到BS2,然后再经过50∶50的分束以后,由M3,M4两个反射镜分别射向南向和西向,这样分光后的激光能量在垂直向、南向、西向的占比理论上为30∶35∶35;而当光路中未添加BS1时,激光源的出射光经过M0,M1反射后直接入射到M2上,经M2反射后垂直射入大气,这样就增加了单束光发射时的光能量,在对光束能量要求高且只需要垂直方向探测的场合下使用。
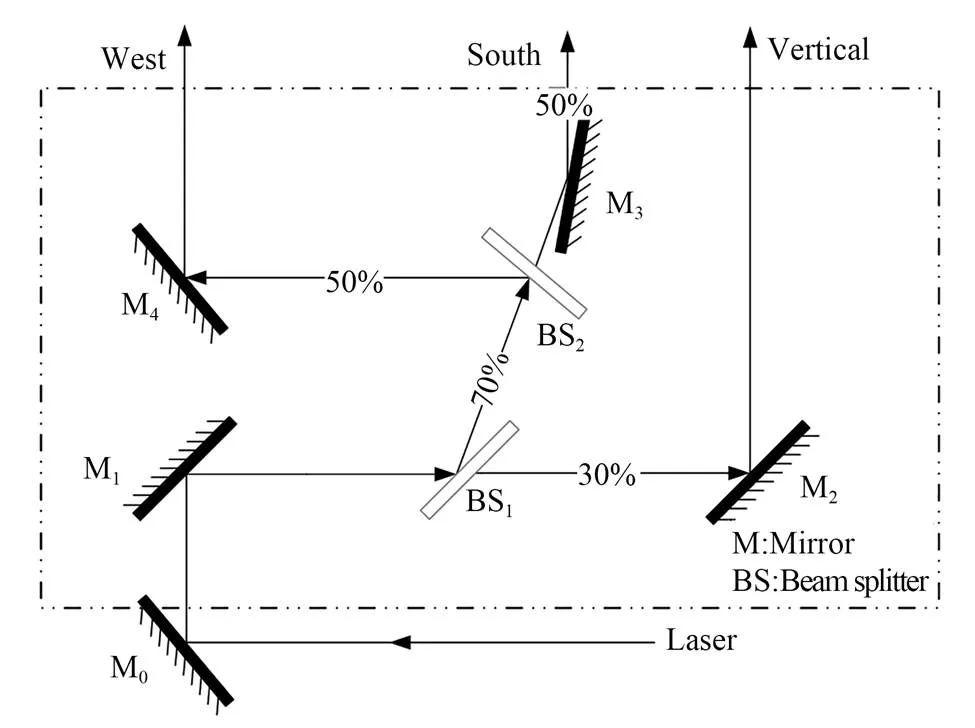
图1 激光分束及发射光路
2.2 器件性能
系统中的光源为高能量的脉冲激光,反射镜的选择除需考虑抗激光的损伤阈值外,还需要考虑材料的反射率,因此反射镜采用镀有宽带介质膜的熔融石英平面反射镜来提升分束系统的整体传输效率,熔融石英具有更好的均匀性和更低的热膨胀系。图2给出了反射镜出厂时的技术指标,光在589 nm处45°反射角下的反射率大于99.6%。
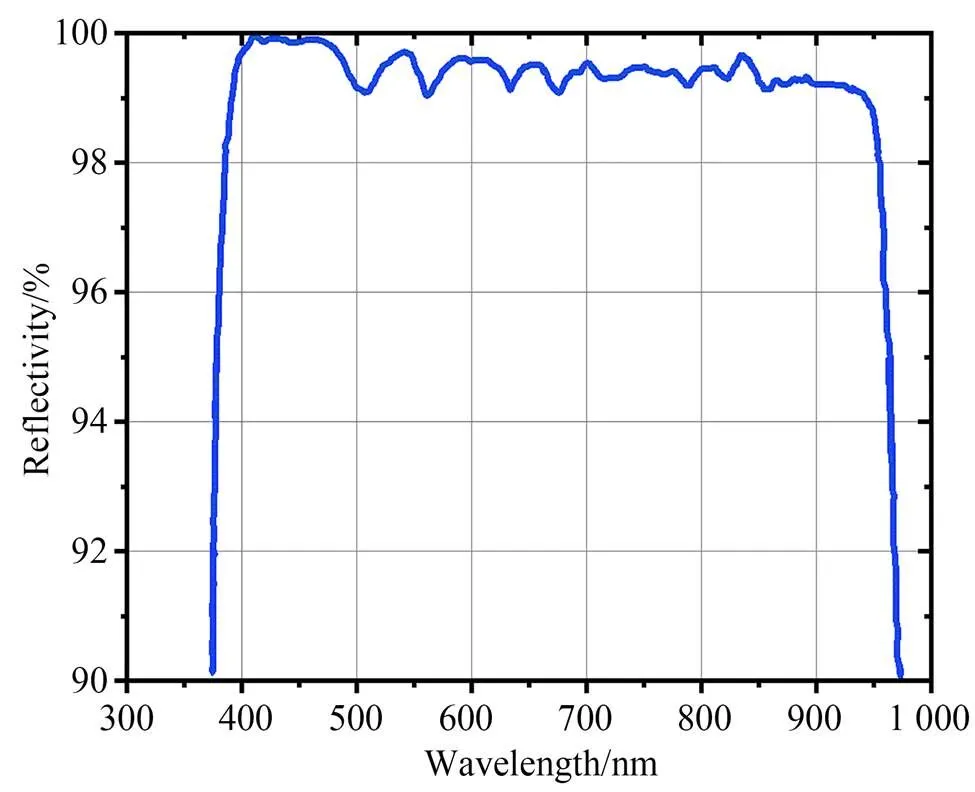
图2 反射镜在不同波长处的反射率
分束镜采用表面镀有增透膜的石英晶体制成,增透膜可减少由前后表面反射光相互作用引起的干涉效应。BS1,BS2分束镜的出厂技术指标见表1,BS1,BS2的分束比分别为30∶70,50∶50。
表1BS1和BS2分束镜的技术指标
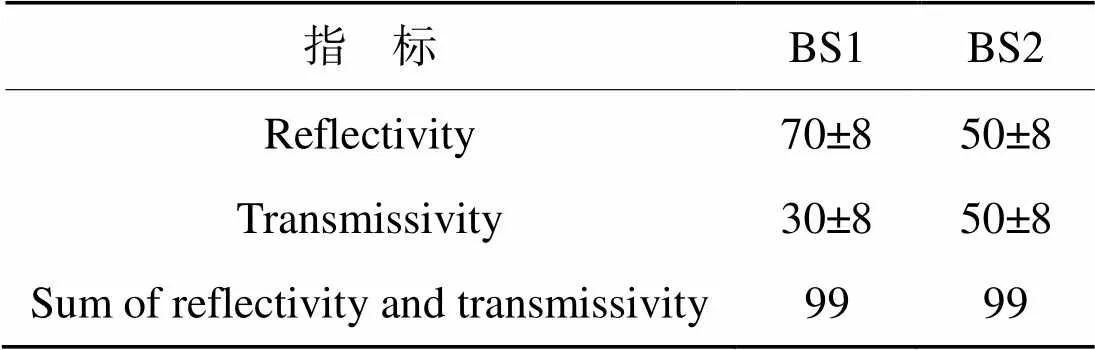
Tab.1 Technical index of BS1 and BS2 beam splitters(%)
位移驱动器对于实现发射系统的高精度、自动化调节具有重要意义,它决定着系统的结构、精度及载重等特性。6个位移驱动器被安装在发射系统中的3个方向上,每个方向装有两个驱动电机,一个驱动电机实现同一方向的水平调节,另一个驱动电机实现同一方向的垂直调节。目前,技术比较成熟的驱动器有步进电机、伺服电机和舵机等[9-10]。步进电机与其他两种电机相比,具有体积小、精度高、性价比高等优良特性。为了满足系统的高精度和长期稳定性的要求,选用的步进电机要能方便地安装于二维调整架上,还要兼顾环境温度变化大及手动和自动可相互转变等特点,选用的步进电机的性能指标如表2表示。
表2步进电机的性能指标
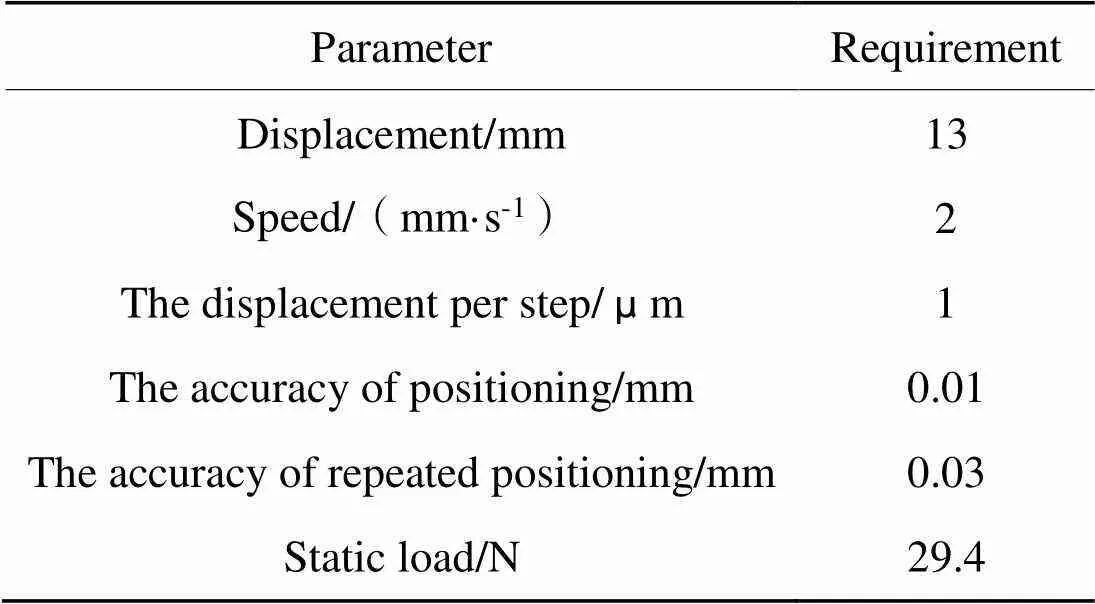
Tab.2 Performance index of stepping motor
为了获得反射镜的摆角信息,设计了一种高精度的角位移测量装置。将两个步进电机分别安装在一个二维调节架的水平调节角和竖直调节角上,二维调节架安装2英寸反射镜,反射镜可以根据步进电机设置的线位移对激光进行一定角位移的改变,如图3所示。
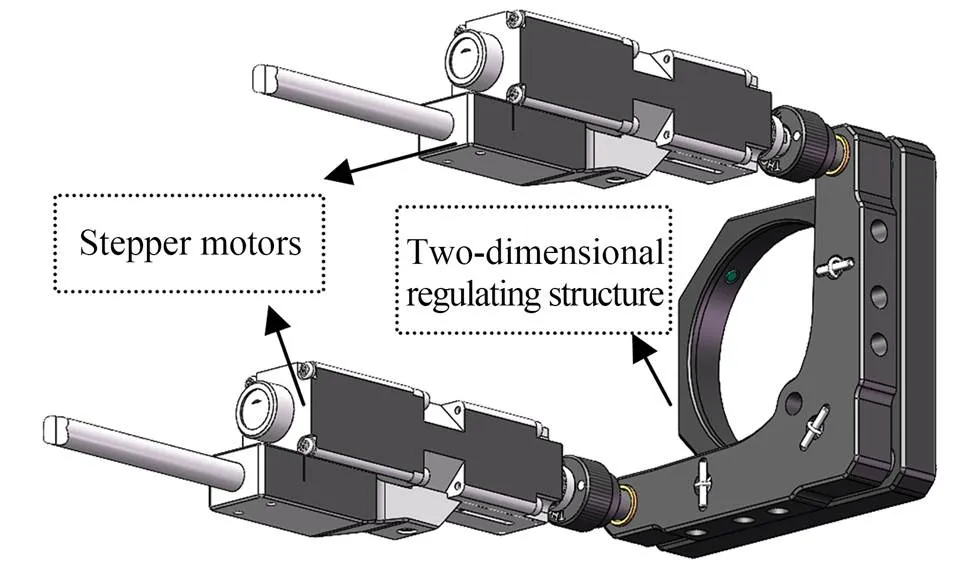
图3 高精度角位移测量装置示意图
2.3 控制软件设计
极区大气钠荧光多普勒激光雷达三方向激光光束控制软件主要实现对系统激光发射方向硬件的控制。三方向激光光束控制软件基于LabVIEW软件开发,软件运行在Win10系统上并通过RS232控制线连接高精度激光发射控制器,实现3个方向上水平(轴)、竖直(轴)的位移调节,从而实现西向、竖直、南向的激光准直。软件控制原理如图4所示。
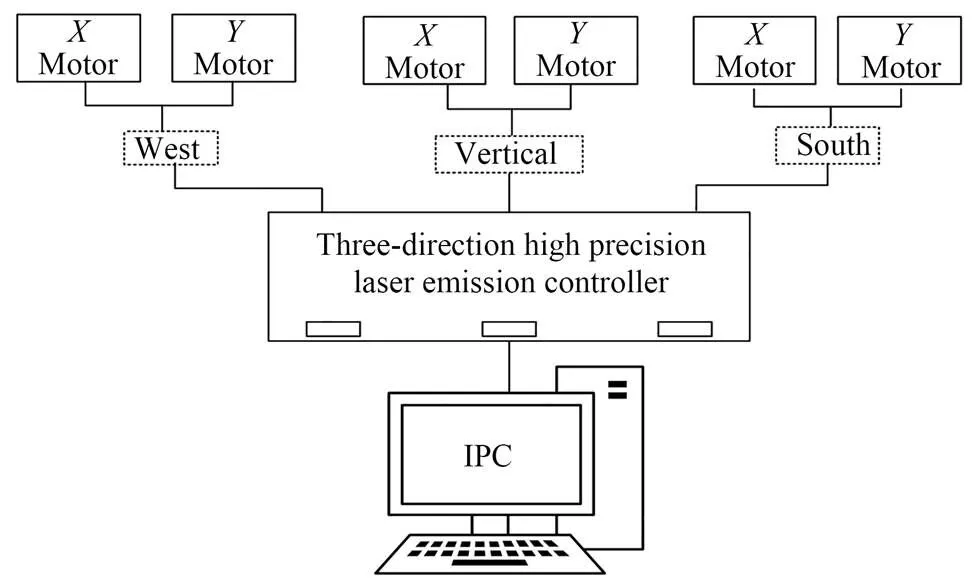
图4 三方向激光发射控制软件原理
软件界面如图5所示,界面设有3个端口号,分别设置Vertical,West,South 3个方向,实现数据通信;每个方向设有轴和轴,通过设置电机步数step实现水平方向和竖直方向的调节,其中step中的1步代表步进电机的实际位移量为0.01 mm;步数设置下面设有电机步数位置显示,能实时显示电机所进行的步数位移数,方便操作。具体操作步骤是先设置好每个方向的端口号,通讯连接成功后在step栏中设置好步进电机的调节步数然后点击Up或者Down键;步进电机会根据设置步数进行一定的位移调节,从而实现每个方向的激光准直调节。
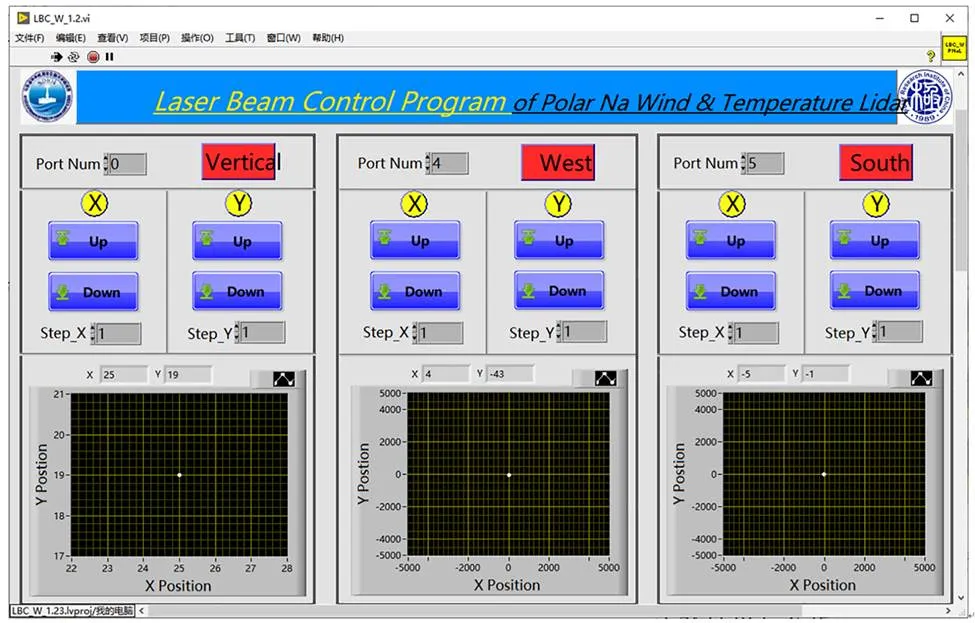
图5 三方向激光指向控制软件界面
2.4 总体结构
中山站钠荧光激光雷达的三分束高精度激光发射系统主要是由工业控制计算机、高精度激光发射控制器、光学发射平板、分光发射组件和电动调节组件等组成,结构如图6所示。分光发射组件、电动调节组件固定于光学发射平板,组成三分束高精度激光发射系统的硬件部分。工业控制计算机、激光发射控制器构成软件部分,实现远程自动化操作。

图6 激光分束及高精度指向调节系统
在实际系统观测时,钠荧光多普勒激光雷达发射高能量的脉冲激光,发射系统将高能量脉冲激光分成能量比例为30∶35∶35的3束光,并将激光打向竖直、西向和南向天空。在优化激光雷达信号时,需要在如图5所示的激光指向控制软件界面中进行操作,通过设置每一方向的轴、轴,观察如图7所示的数据采集软件显示界面中信号是否达到最优,最终实现竖直、西向和南向的信号优化。

图7 钠荧光多普勒激光雷达信号采集软件界面
3 实验结果与分析
系统的定位精度和能量损失是表征其性能的重要指标,实验分别对三分束高精度激光发射系统的定位精度和能量损失进行测试。
3.1 定位精度测量
实验采用系统中的竖直方向为测试对象,如图8所示。为使测量结果精确,将激光多次反射到一定距离,设这段距离为(实际设置距离为20 m),设置步进电机进行一定位移,采用游标卡尺测量处的光斑线位移量Δ,则可将光斑的线位移量转为角度变化量[11]。
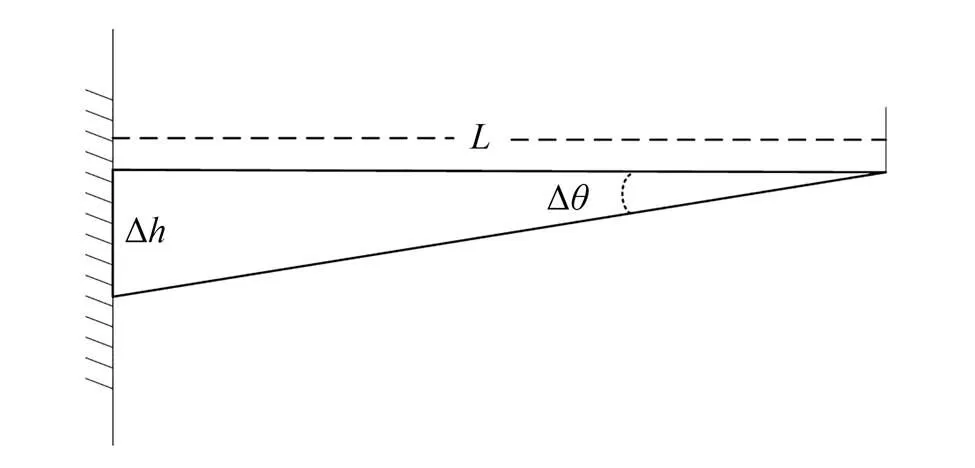
图8 系统角位移测量原理

考虑到角位移量通常很小,式(1)近似表示为:
经过实验测量与式(2),可获得系统的角位移分辨率为1.1',此分辨率完全满足系统的调节要求。对系统进行重复定位精度测试,以20 m处激光偏差1 mm(角偏差为0.17')为判断重复定位成功的标准,分别设置不同的步进数,每个步进数下测量110次,获得多次不同步进数下的重复定位精度,如图9所示。
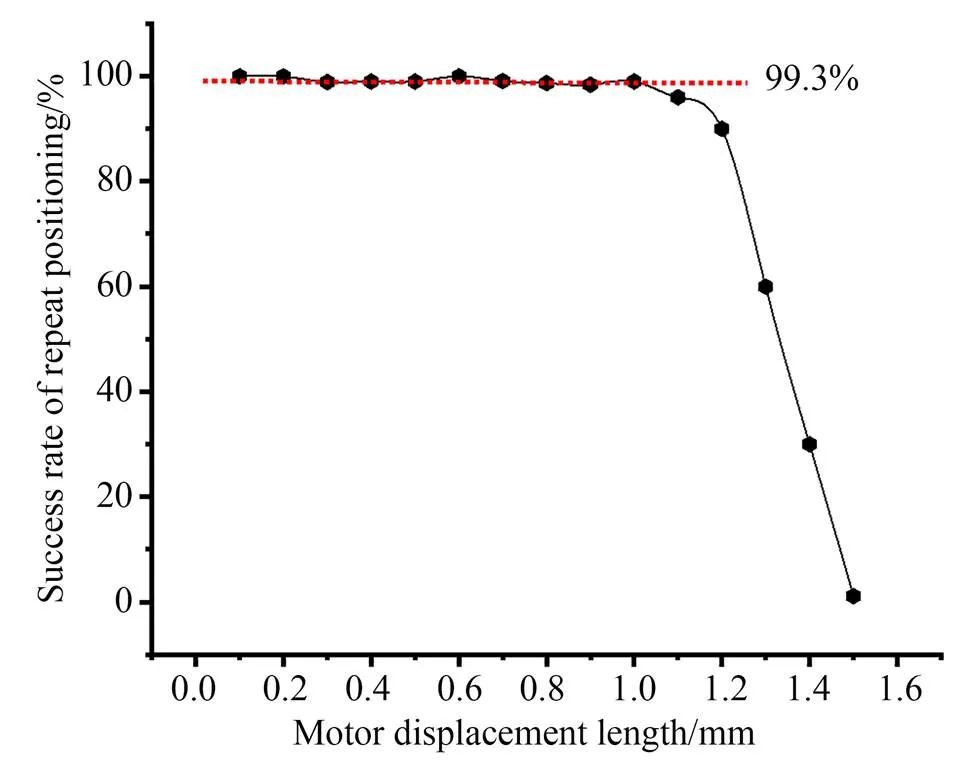
图9 步进电机不同步数下的系统重复定位成功率
实验结果表明,步进电机位移在0~1.1 mm时,重复定位成功率可达99.3%,在超过1.2 mm时,由于步进电机受所驱动的镜架的弹力增大,重复定位成功率逐渐下降;当步进电机位移量为1.5 mm时,成功率已降为0,为此,在系统中将步进电机的调节范围设置为0~1 mm。钠荧光多普勒激光雷达的探测目标在80~110 km处,步进电机位移0.1 mm,激光在100 km处的横向位移量为160 m,已远远超出望远镜在此处的观测直径,因此步进电机的位移量仅需0.5 mm就可以满足系统的探测需求。
3.2 能量损失测试
将激光能量功率计分别放置于如图1所示的M0前端与M2,M3,M4后端进行总能量与分束后的能量测试,每进行一次能量测试,都要人为改变系统的实际出射总能量,以便获得不同能量下分束后的出射能量结果。多次测量计算后垂直向、西向、南向的激光能量对比测试结果约为32∶34∶34,与理论值有一定偏差,但满足系统需求,偏差的原因与两个分束镜放置的角度有关,分束镜与激光方向呈45°角放置时,激光能量偏差最小。将分束后的三束激光能量求和,并与激光进入发射系统之前的总能量进行对比,求得能量损失,改变激光能量获得不同激光能量下的能量损失比,如图10所示。
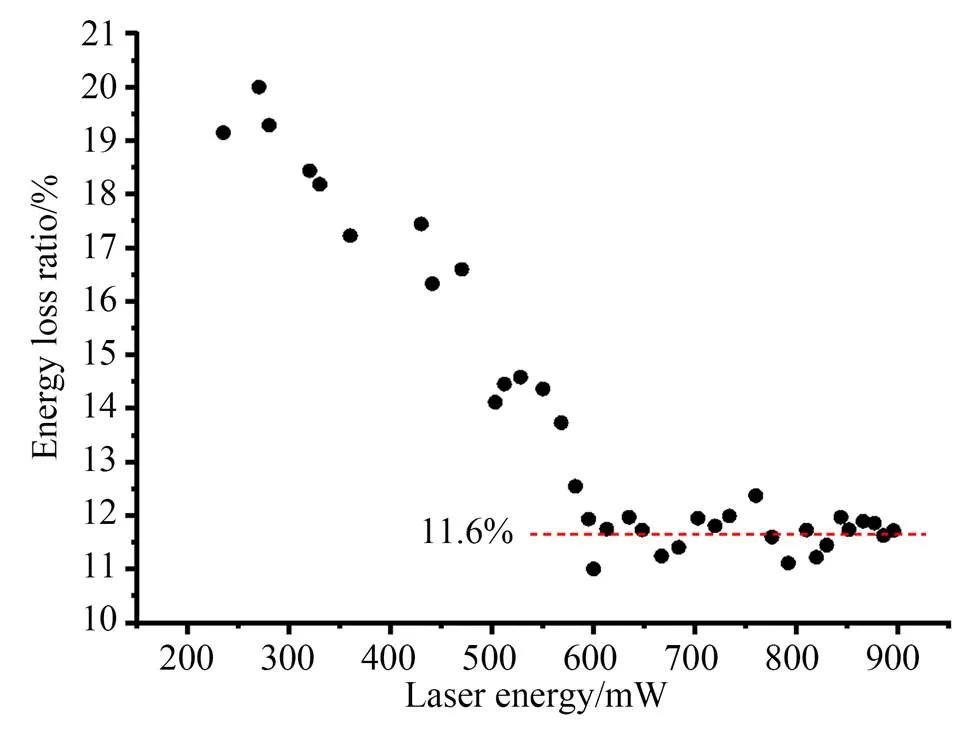
图10 系统能量损失测试结果图
由图10可以看出,随着激光能量的逐渐增大,分束后的激光能量损失逐渐减小,并在激光总能量为600 mW以上时分束后能量损失达到稳定,能量损失比均值为11.6%。其主要原因为激光功率计在测量分束以后的低能量激光时探头不够灵敏。
4 结 论
根据钠荧光多普勒激光雷达发射系统的高精度、自动化的性能要求,本文采用高损伤阈值的反射镜及分束镜,且为了减小能量损失,对光学镜片进行了镀膜处理。采用高精度的步进电机作为发射系统的驱动装置。搭建完成后的系统总能量损失为11.6%,能实现1.18°的角度行程,调节精度可达1.1',且重复定位成功率达99.3%,完全满足钠荧光多普勒激光雷达的发射需求。为了实现自动化,对系统进行了软件编写,可实现系统的远程自动化操作,对于恶劣环境下实现钠荧光多普勒激光雷达的远程自动化操作,实现信号的迅速、高精度优化具有重要意义。
[1] 杨义彬. 激光雷达技术的发展及其在大气环境监测中的应用[J]. 成都信息工程学院学报, 2005, 20(6): 725-727.
YANG Y B. Development of laser radar technology and its application to atmospheric environment monitoring[J]., 2005, 20(6): 725-727. (in Chinese)
[2] 赵一鸣,李艳华,商雅楠,等. 激光雷达的应用及发展趋势[J]. 遥测遥控, 2014, 35(5): 4-22.
ZHAO Y M, LI Y H, SHANG Y N,. Application and development direction of lidar[J].,, 2014, 35(5): 4-22. (in Chinese)
[3] 胡雄,闫召爱,郭商勇,等. 钠荧光多普勒激光雷达测量中间层顶区域大气温度[J]. 科学通报, 2011, 56(3): 247-253.
HU X, YAN ZH A, GUO SH Y,. Measurement of atmospheric temperature in the mesopause region by sodium fluorescence Doppler lidar[J]., 2011, 56(3): 247-253. (in Chinese)
[4] 黄文涛. 中国南极中山站完成钠荧光多普勒激光雷达安装[J]. 极地研究, 2019, 31(2): 228-230.
HUANG W T. China established a sodium fluorescence Doppler lidar at Zhongshan station, Antarctica[J]., 2019, 31(2): 228-230. (in Chinese)
[5] 李铭,候佳,周成林,等. 多波束激光雷达的高精度收发配准方法的实验验证[J]. 红外与激光工程, 2017, 46(7): 55-63.
LI M, HOU J, ZHOU CH L,. Experimental verification of transmitting-receiving registration method with high precision used in multi-beam lidar[J]., 2017, 46(7): 55-63. (in Chinese)
[6] 黄垒,辛立平,韩旭辉,等. 广角天文望远镜的自动调焦[J]. 光学精密工程, 2015, 23(1): 174-183.
HUANG L, XIN L P, HAN X H,. Auto-focusing of wide-angle astronomical telescope[J]., 2015, 23(1): 174-183. (in Chinese)
[7] SUITE M R, BURRIS H R, MOORE C I,. Fast steering mirror implementation for reduction of focal-spot wander in a long-distance free-space optical communication link[C].,485160,,,,2004, 5160: 439-446.
[8] DEYOUNG D B, BAUGH S, GALETTI R R,. Beam control system for an airborne laser radar[C].3931,,,, 2000, 3931: 311-320.
[9] 黄志瑛,李威. 步进电机与交流伺服电机性能比较[J]. 广西轻工业, 2010, 26(3): 44.
HUANG ZH Y, LI W. Performance comparison between stepping motor and AC servo motor[J]., 2010, 26(3): 44. (in Chinese)
[10] 司鹏辉. 步进电机和交流伺服电机性能综合比较[J]. 电子测试, 2015(13): 85-86, 47.
SI P H. The comprehensive comparison of performance of stepping motor and AC servo motor[J]., 2015(13): 85-86, 47. (in Chinese)
[11] 朱凡,李颖先,谭久彬. 高精度激光光束准直系统设计[J]. 光学精密工程, 2020, 28(4): 817-826.
ZHU F, LI Y X, TAN J B. Design of high-accuracy laser beam collimation system[J]., 2020, 28(4): 817-826. (in Chinese)
Laser beam splitting and high precision pointing adjustment system
WANG Zhangjun1*,HUANG Wentao2,ZHANG Feng1,LI Xianxin1,CHENG Xuewu3,YU Yang1,XUE Boyang1,CHEN Chao1
(1,(),266100,;2,200120,;3,,430000,),:
A three-directional laser beam splitting system with high precision pointing adjustment iwas developed, including its hardware and software. This laser beam pointing control of sodium fluorescent Doppler lidar facilitated obtaining quick and accurate signals for long distance observation. Based on the design requirements of the optical system, the physical and mechanical characteristics of the beam splitter and reflector were presented. An angular stroke of 1.18° can be achieved using six high-precision stepper motors combined with six high-precision optical 2-D adjusting frames, with an adjustment precision of 1.1', and the success rate of repeated positioning is 99.3%. The experimental results meet the precision requirements of the high energy laser emitting system. According to the performance requirements of the system, the laser energy loss is 11.6% after the beam splitter, which meets the laser energy emission requirements of sodium fluorescent Doppler lidar. A set of control software for the system was written to support remote automatic control of the laser lidar.
lidar; three beam; energy loss; high precision; automatic control
TN958.98;TH744
A
10.37188/OPE.20223001.0038
1004-924X(2022)01-0038-07
2021-05-28;
2021-06-28.
国家重点研发计划资助项目(No.2018YFC1407300);山东省重点研发计划资助项目(No.2020CXGC010104,No.2021JMRH0104)
王章军(1982),男,山东人,博士,研究员,2011年于中国海洋大学获得博士学位,主要从事海洋光学与激光探测技术的研究。E-mail:zhangjun.wang@hotmail.com

