基于混合IWO—PSO算法的掘进机截割轨迹规划方法
2022-01-19田劼银晓琦文艺成
田劼, 银晓琦, 文艺成
(1.中国矿业大学(北京) 机电与信息工程学院, 北京 100083;2.煤矿智能化与机器人创新应用应急管理部重点实验室, 北京 100083)
0 引言
煤矿智能化是煤炭行业高质量发展的核心技术支撑和必由之路[1-2]。在掘进机开采煤炭形成巷道断面的过程中,截割轨迹规划是重要环节。不合理的截割轨迹规划会导致截割装备姿态频繁调整,增加截割部的截割能耗,并产生较大的欠挖面积,影响整体断面成形质量。因此,对掘进机截割轨迹进行合理规划对于降低掘进设备损耗、提高断面成形质量具有重要意义[3]。
学者们针对不同巷道断面环境下的掘进机截割轨迹规划问题进行了深层次研究。S. Wang等[4]提出了基于蚁群算法搜索最短截割路径的方法,在避免与脏带碰撞的同时完成了掘进机截割成形。F. Wang等[5]在构建掘进机截割臂动力学模型的基础上,设计了PD型迭代学习控制器,保证了掘进巷道断面成形精度在可控范围内。刘若涵等[6]采用Dijkstra算法和栅格法识别煤岩位置,完成了对掘进机截割轨迹的有效规划。夏煌煌[7]通过对蚁群算法的优化实现了煤矿巷道截割轨迹预测功能,在保证煤矿巷道断面成形质量的同时,降低了设备自身截割损耗。上述研究成果对解决复杂环境下巷道断面精准成形问题有重要推动作用,但仍存在规划截割路线准确度低、掘进设备损耗大的问题。
标准粒子群优化(Particle Swarm Optimization,PSO)算法具有良好的寻优深度和收敛速度,但种群在搜索空间中易丢失多样性,从而陷入局部最优。杂草优化(Invasive Weed Optimization,IWO)算法在寻优过程中具有良好的广度和多样性[8]。因此,本文将2种算法进行融合,提出一种基于混合IWO-PSO算法的掘进机截割轨迹规划方法。以IWO算法中的种子扩散方式为基础对初始群体进行扩散,同时采用PSO算法中的位置迭代更新方式对繁殖的种子位置实现迭代更新。该方法有效降低了掘进设备的截割能耗,能满足不同煤矿巷道断面环境下的有效避障和成形要求。
1 巷道断面栅格模型
1.1 巷道断面栅格化
栅格地图被广泛应用于智能设备路径规划、实时避障信息模型的建立等,具有简单、高效的优点。煤矿掘进巷道断面形状主要分为矩形、梯形和拱形3种,为准确表示掘进巷道断面中障碍物夹矸的尺寸及位置,需标定掘进过程中需要经过的轨迹点位置。本文针对矩形巷道断面进行栅格化,构建二维地图模型。


图1 巷道断面栅格地图Fig.1 Grid map of roadway section
1.2 夹矸形状膨胀化
由于实际巷道断面中夹矸形状具有不规则性,需将未占据完整单元栅格的障碍点膨胀为一个完整的单元栅格。栅格地图障碍物膨胀法遵循二值膨胀法,即通过具有一定结构状态的结构元素衡量和对应存储图样中的相应形状,对图样进行鉴识及判辨。二值膨胀法数学公式为
O=U⊕I=[(x,y)|[Ixy∩U]≠∅]
(1)
式中:O为膨胀后图像;U为结构元素;I为原始图像;(x,y)为膨胀位置坐标;Ixy为膨胀位置原始图像。
在栅格地图中构建直角坐标系,将轨迹点由左至右、由下而上依次标注序号,其中掘进机截割部起始位置为序号1所在位置。不规则夹矸膨胀前后对比如图2所示。

(a) 膨胀前

(b) 膨胀后图2 不规则夹矸膨胀前后对比Fig.2 Comparison of irregular gangue before and after expansion
2 混合IWO-PSO算法
2.1 PSO算法
PSO是对自然界中鸟类群体觅食过程中的趋势与交流行为进行模拟,使群体达到最优化的仿生寻优算法。在算法迭代过程中,将每个粒子当前位置适应值分别与其个体历史最佳位置适应值和全局最佳位置适应值进行对比分析,选择适应值更高的粒子位置,不断更新每个粒子的速度与位置,直至完成寻优过程[9]。
速度和位置更新公式分别为
Vi(t+1)=wVi(t)+c1φ1[Pi(t)-xi(t)]+
c2φ2[Pg(t)-xi(t)]
(2)
xi(t+1)=xi(t)+Vi(t+1)
(3)
式中:Vi为第i个粒子的速度;t为当前时刻;w为惯性权重;c1,c2为加速度常数;φ1,φ2为[0,1]的随机数;Pi为个体历史最佳位置;xi为粒子位置;Pg为全局最佳位置。
PSO算法利用粒子当前位置、群体经验和个体经验对其下一步行为进行控制,可迅速逼近最优解,对系统参数进行有效优化,但不能保证寻优空间的多样化,易产生早熟收敛、陷入局部最小等问题[10]。
2.2 IWO算法
IWO算法是一种仿生寻优方法,通过模拟自然界中杂草蔓延进程实现。该算法在逐次换代时依据杂草个体位置的适应程度计算可繁殖的种子数量,并将其随机分布在寻优空间中,同时在父代个体位置周围利用正态分布方式进行扩张及蔓延,最终以适应程度为判定标准对全部个体进行排序,排除不满足适应标准的个体,保留剩余个体。种子繁殖数量计算公式和位置更新公式分别为[11]
(4)
xi(t+1)=xi(t)+σi(t)+randn()
(5)
式中:S为种子繁殖数量;Smin,Smax分别为种子繁殖数量的最小值、最大值;f为当前种群中杂草的适应度值;fmin,fmax分别为适应度的最小值、最大值;σi为种子所分布位置的标准差;randn()为服从正态分布的随机数。
IWO算法较PSO算法在寻优广度方面有极大改进,在竞争排斥前令所有个体自由繁殖,最大程度保留了有效信息,但其寻优深度不如PSO算法,在优化种子离散分布方法方面仍有待探索[12]。
2.3 混合IWO-PSO算法
PSO与IWO是具有不同学习途径的寻优方法。PSO算法搜寻过程具有良好的深度和收敛速度,而IWO算法搜寻过程具有良好的广度和多样性。因此,本文提出一种混合IWO-PSO算法,以IWO算法中的种子扩散方式为基础,对初始群体进行扩散,在竞争排斥前允许所有个体自由繁殖,使寻优空间的多样化得到有效保障;同时采用PSO算法中的位置迭代更新方式对繁殖的种子位置进行迭代更新,利用群体经验和个体经验对粒子位置进行及时调整,有效提高算法寻优深度和速度。
混合IWO-PSO算法流程如图3所示。在生成随机群体并初始化群体数量后进入迭代寻优过程,在每次迭代过程中,计算个体适应度值和种群适应度极限值,记录全局最优位置,同时与各个体历史位置对比,更新个体历史最佳位置;根据适应度值计算个体可繁殖种子数量,同时更新各种子的速度及位置,将生成的种子在寻优范围内随机分布,并在父代植物周围正态分布;经多次进化后,将当前种群规模与种群规模极限值对比,若已超过种群规模极限值,以适应程度为判定标准对全部个体进行排序,排除不满足适应标准的个体,保留剩余个体。种子的速度及位置更新公式分别为
(6)
xi,j(t+1)=xi(t)+Vi,j(t+1)
(7)
式中:Vi,j为第i个成员的第j个种子的速度;φ1,j,φ2,j为[0,1]的随机数;xi,j为第i个成员的第j个种子的位置。
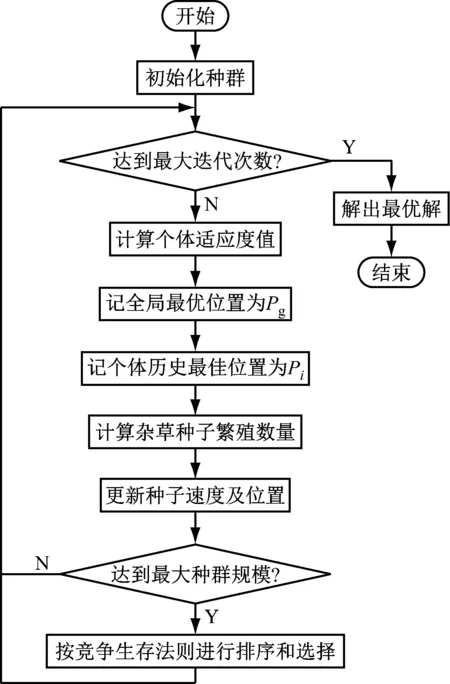
图3 IWO-PSO算法流程Fig.3 Flow of IWO-PSO algorithm
采用混合IWO-PSO算法进行掘进机截割轨迹规划时,随机将种群个体置于不同生长位置,根据种子的繁殖蔓延及位置的迭代更新对寻优空间进行不断搜索,确定轨迹点先后顺序,对最优轨迹路线进行预测,在保证经过所有设定轨迹点的前提下,规避障碍位置,寻得最优轨迹路线。
3 仿真分析
将掘进巷道断面分为单夹矸、双夹矸和多夹矸断面,建立相应情况的栅格地图,以降低截割能耗为优化目标,采用混合IWO-PSO算法和标准PSO算法实现路径寻优,并进行对比分析。
3.1 截割能耗模型
进行掘进机截割轨迹规划的主要目的在于降低掘进机截割能耗、保障断面成形质量。掘进机截割能耗Q由截割头旋转能耗Q1和截割头摆动能耗Q2构成,即Q=Q1+Q2。旋转能耗与二次挖掘栅格面积呈正相关,与欠挖栅格面积呈负相关,摆动能耗与截割轨迹长度呈正相关。旋转能耗、摆动能耗计算公式分别为
Q1=HW(s+s1-s2-s0)h
(8)
Q2=Kd
(9)
式中:HW为截割单位体积煤岩能耗;s为断面面积;s1为二次挖掘栅格面积;s2为欠挖栅格面积;s0为夹矸面积;h为截割头平均钻入深度;K为截割臂摆动单位长度能耗;d为截割路径长度。
3.2 仿真设置
设巷道断面尺寸为4 m×4 m,截割头半径为0.4 m,栅格分辨率为0.4 m×0.4 m,3种断面环境见表1。

表1 断面环境Table 1 Section environment type setting table
混合IWO-PSO算法参数:种群初始规模N0为5,最大迭代次数Tmax为300,最大种群数量Nmax为40;杂草种子繁殖数量最大值Smax为5,最小值Smin为1;标准差初值σinit为20,终值σfin为0.1;惯性权重w为0.7,c1为0.5,c2为2,最大速度Vmax为20。
3.3 仿真结果
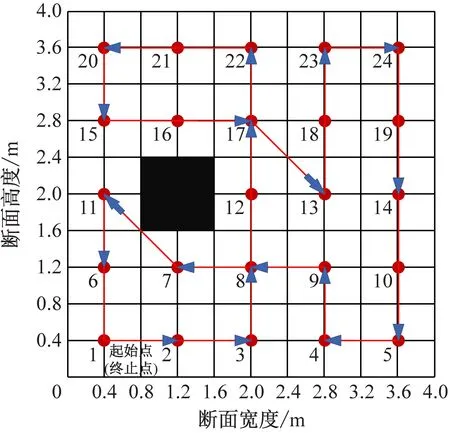
混合IWO-PSO算法和标准PSO算法在3种断面环境下的寻优轨迹如图4和图5所示。

(a) 单夹矸环境
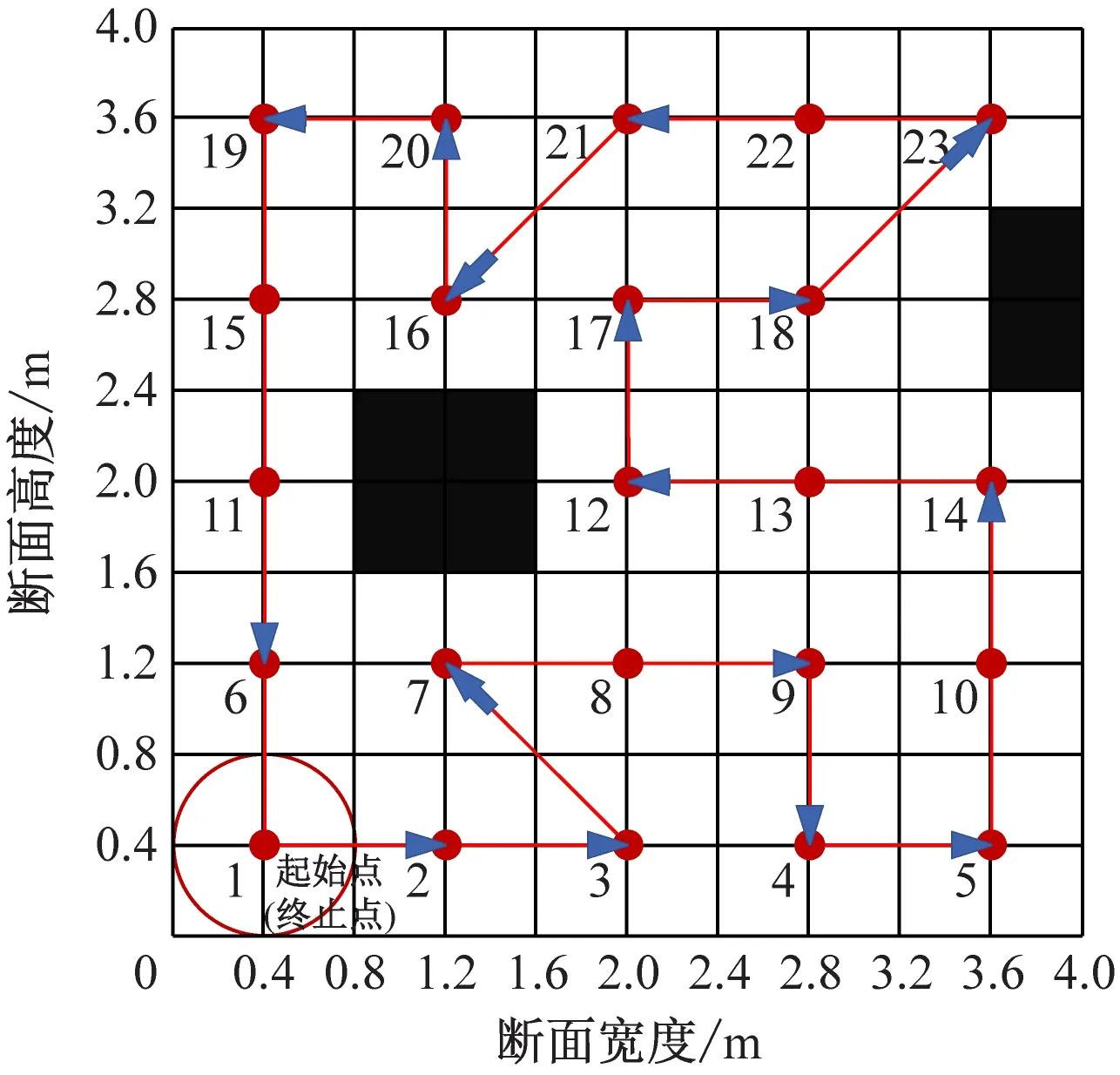
(b) 双夹矸环境
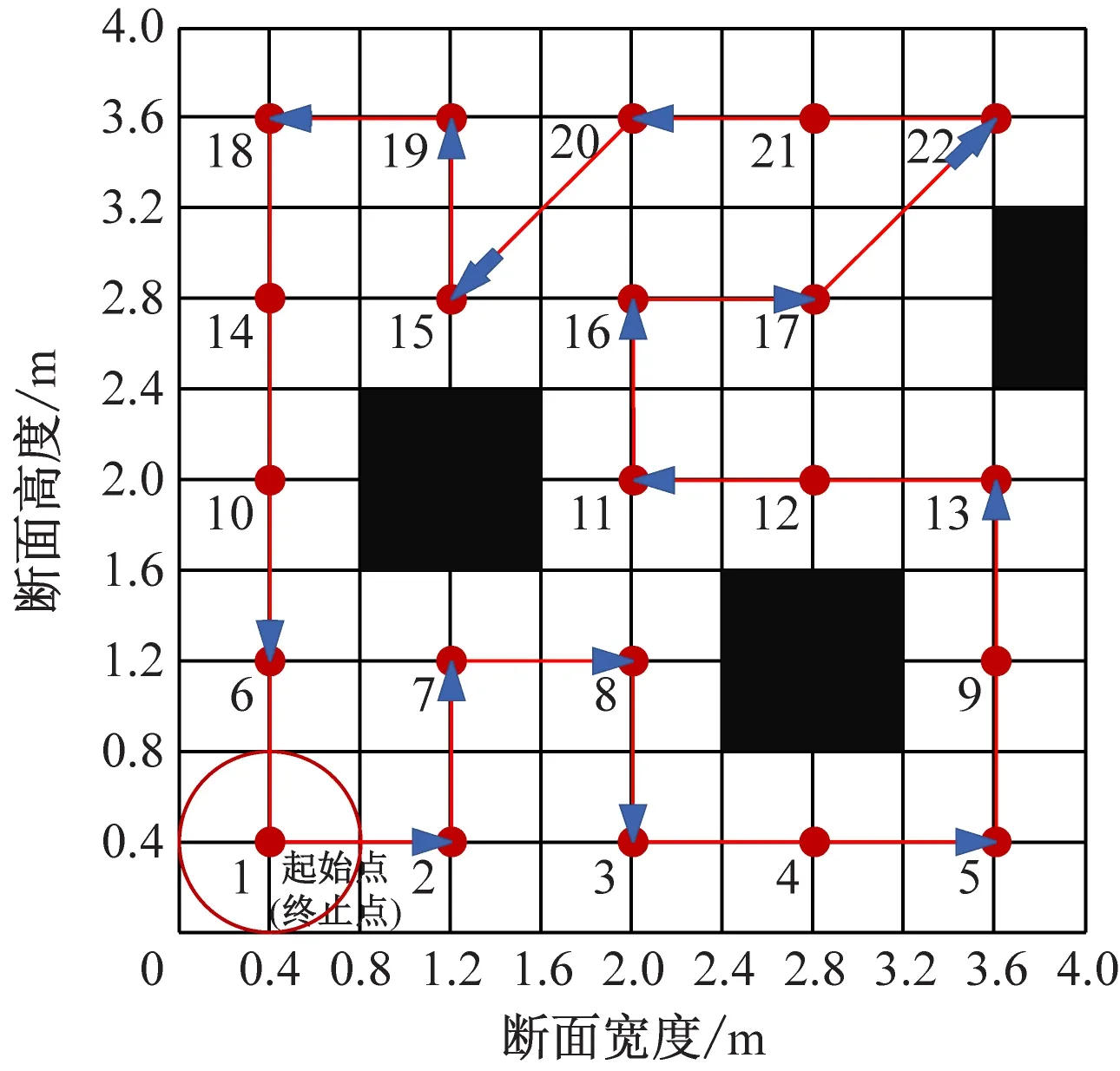
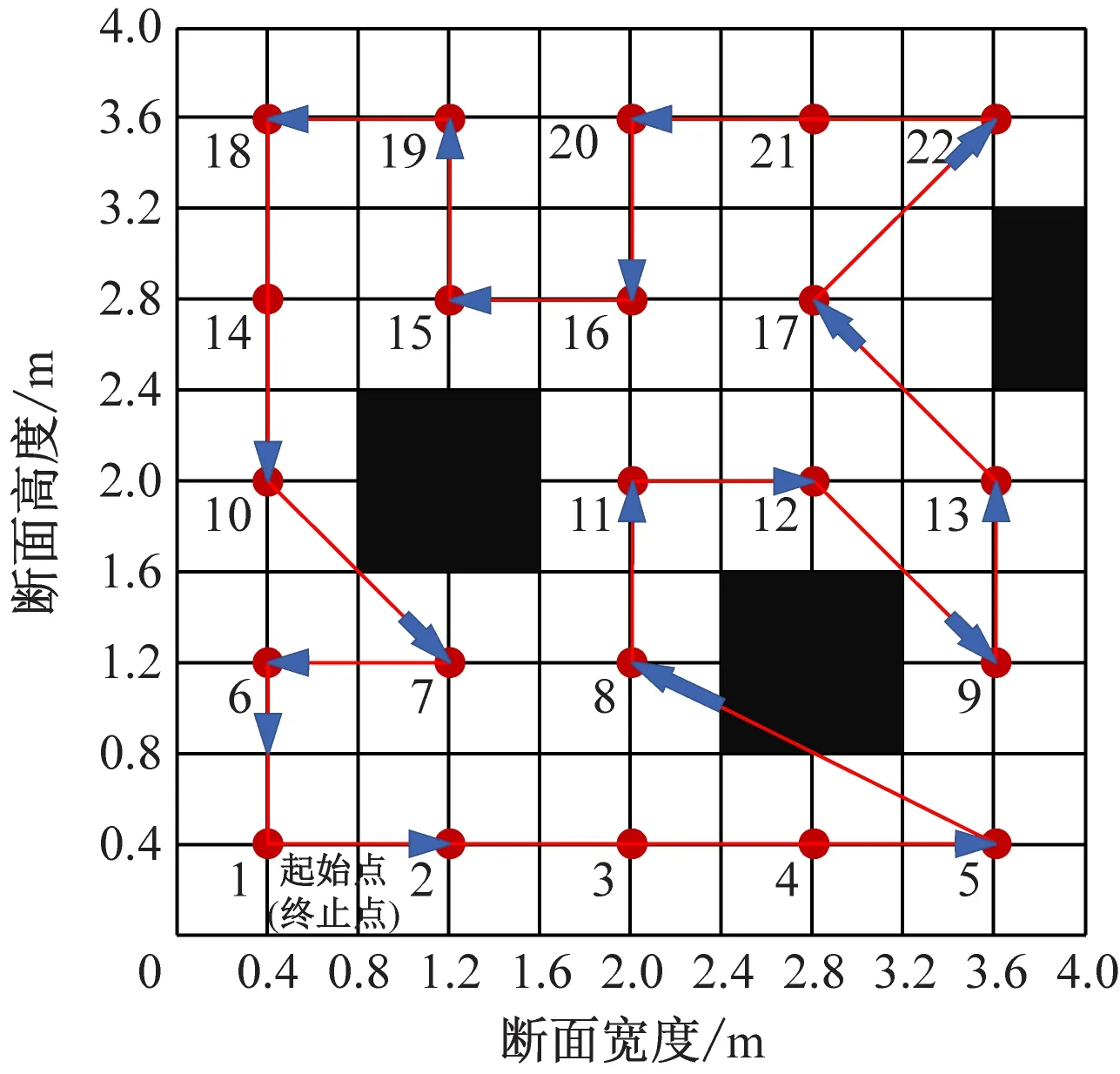
(c) 多夹矸环境图4 混合IWO-PSO算法在3种断面环境下的寻优轨迹Fig.4 Optimal trajectory of hybrid IWO-PSO algorithm in three cross-section environments
(a) 单夹矸环境

(b) 双夹矸环境
(c) 多夹矸环境图5 标准PSO算法在3种断面环境下的寻优轨迹Fig.5 Optimal trajectory of standard PSO algorithm in three section environments
路径起始点及终止点均为轨迹点1处,截割头由轨迹起始点出发,遍历所有待截割轨迹点后,回到终止点,箭头所指方向即为截割头运动方向。针对水平方向或垂直方向轨迹,实际截割过程中仅开启回转油缸或升降油缸,使掘进机实现水平方向或垂直方向截割运动。对于斜向轨迹,实际截割时同时开启回转油缸和升降油缸,根据斜向末点位置计算升降油缸伸缩量,同时每隔0.5 s计算回转油缸伸缩量,直至到达斜向末点位置。
3.4 算法对比分析
针对轨迹长度、欠挖栅格数、二次挖掘栅格数和截割能耗4项指标,对混合IWO-PSO算法和标准PSO算法在不同断面环境下的轨迹规划性能进行对比,结果见表2。
由表2可知,基于混合IWO-PSO算法得到的掘进机截割轨迹长度、二次挖掘栅格数和截割能耗均小于标准PSO算法,对障碍夹矸的规避能力优于标准PSO算法,同时有效降低了掘进机截割能耗,能满足不同巷道断面环境下的有效避障和成形要求。

表2 混合IWO-PSO算法和标准PSO算法轨迹规划性能对比Table 2 Performance comparison of trajectory planning between hybrid IWO-PSO algorithmm and standard PSO algorithm
4 地面试验
在EBZ135型掘进机上进行地面试验,以验证混合IWO-PSO算法的可行性。截割部水平回转及垂直升降运动分别由水平回转油缸和垂直升降油缸伸缩运动实现控制[13],调整掘进机机身位姿及截割头位置,进行断面截割成形试验,如图6所示。设定3 m×3 m的矩形断面,巷道断面成形显示界面如图7所示,可见,混合IWO-PSO算法实现了巷道断面的有效截割。

图6 现场截割试验Fig.6 Field cutting test

图7 巷道断面成形显示界面Fig.7 Display interface of roadway section forming
为检测截割精度,在掘进机正前位置放置投影面板,两侧地面根据截割断面宽度分别放置1个激光发射器,调整截割臂至机身中线位置,在投影面板上标注巷道断面两帮的激光投影线,作为测量参考线。将磁吸附分光器固定于截割头中点,其在前侧面板的投影点位置即为截割头运动位置。记录分光器在投影面板上的位置与两帮参考线的距离,即截割头的定位控制误差[14]。误差测试现场如图8所示,断面成形误差见表3。

(a) 激光发射器和磁吸附分光器

(b) 激光指示图8 误差测试现场Fig.8 Error test site
由表3可知,巷道断面成形左侧边界误差最大值为30 mm,相对误差在2%内;巷道断面成形右侧边界误差最大值为20 mm,相对误差在1.4%内;两侧边界误差最大值为50 mm,相对误差在1.7%内。基于混合IWO-PSO算法的巷道断面成形精度可满足应用要求。
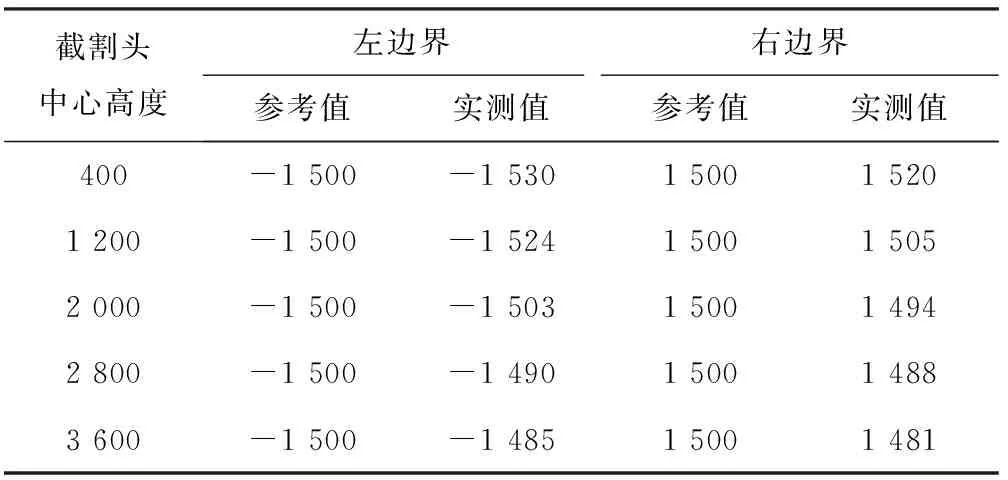
表3 断面成形误差Table 3 Error of section forming mm
5 结论
(1) 混合IWO-PSO算法能在单夹矸、双夹矸和多夹矸3种断面环境中对掘进机截割轨迹进行有效规划,在保证断面成形质量的同时有效降低了截割能耗。
(2) 混合IWO-PSO算法所规划截割轨迹在总长度、二次挖掘栅格数和截割能耗3个方面均小于标准PSO算法,对障碍夹矸的规避能力优于相同环境下的标准PSO算法。
(3) 通过EBZ135型掘进机进行断面截割试验,结果表明,巷道断面成形左侧、右侧、两侧边界误差最大值分别为30,20,50 mm,相对误差分别在2%,1.4%,1.7%内,可满足不同巷道断面环境下的有效避障和成形要求。
