功能反应函数的演化对食饵捕食系统动力学的影响
2022-01-19王玉億
王玉億,邹 兰
(四川大学 数学学院,四川 成都 610064)
研究食饵捕食系统

其中,α 表示食饵出生率,βx 表示由食饵种族内部竞争带来的食饵密度变化率,γ 表示捕食者死亡率,k表示捕食者将捕食的食饵转化为自身增长的效率.x(t)和y(t)分别表示食饵和捕食者在时间t时的密度分布,由系统(1)的生物学意义可知
为Beddington-DeAngelis功能反应函数,表示在每单位时间、每单位捕食者的捕食下食饵密度的变化,也称作捕食率,其中a,b >0.当c =0 时,
为经典的Holling II 型功能反应函数,bx 表示捕食率的增幅随x增加而下降;当c >0 时,cy 表示捕食率随y增加而下降.
食饵捕食系统的动力学行为一直受到学者的关注[1-8],其中具有Holling II型功能反应的食饵捕食系统也称为“R-M”模型.陈兰荪等[9]用微分方程定性分析方法对“R-M”模型作了详细分析,并讨论了极限环的存在性和唯一性.对于Beddington-DeAngelis型功能反应,Cantrell等[10]指出c影响正平衡点的位置和稳定性,且当c 充分小时,系统大致上与c =0 时的系统表现出相似的动力学性质;Hwang[11]证明了正平衡点局部渐进稳定与全局渐近稳定相一致,并归纳了正平衡点全局渐稳的情况,证明了极限环的唯一性[12];Zhang等[13]讨论了系统(1)的Hopf分岔,给出的分岔值是多个参数的一个复杂形式;文献[14]也讨论了系统(1)的Hopf分岔,整理出了相对简单的分岔参数与分岔值,该值仍是多个参数的表达式;文献[15]的结果更清晰全面地总结边界平衡点的局部与全局渐稳,研究了边界平衡点存在跨临界分岔及正平衡点的Hopf 分岔,给出分岔参数.由于平衡点坐标形式复杂,表达式使用隐式形式,分岔依赖于许多参数的一个复杂表达式.另一方面,前人工作中多是考虑c >0 的情况.由于可能存在部分特殊的群居捕食者进行合作捕食,捕食率随y增加而上升,这对应着c <0.
本文着重探索φ(x,y)中有无cy项对系统(1)的动力学行为的影响,即功能反应函数从Holling II型演化为Beddington-DeAngelis 型时动力学行为的变化.具体地,考虑c 从0 变为充分小的数(正或负)时系统(1)的动力学行为有无变化,从而对文献[10]中关于“系统在c为充分小正数时大致上具有与c =0 时相似的动力学性质”的注释给出严格数学推导,并研究c 为充分小负数时的动力学变化.此外,通过Poincaré变换分析无穷远点的性质,讨论全退化无穷远点附近的轨线走向,结合文献[12]中关于全局稳定性的结果,给出全局相图.
1 平衡点分析
令
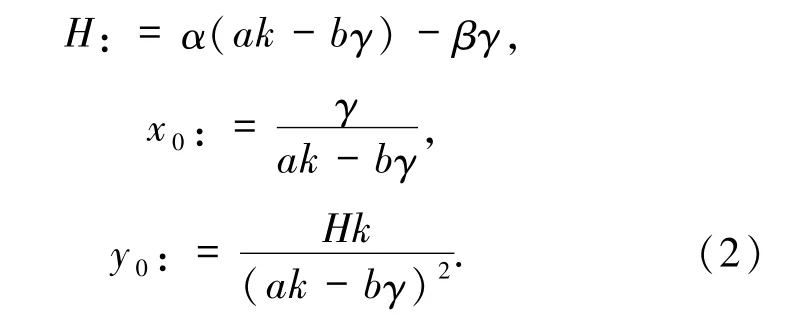
直接计算易知,当c =0 时,系统(1)的平衡点类型如表1 所示.
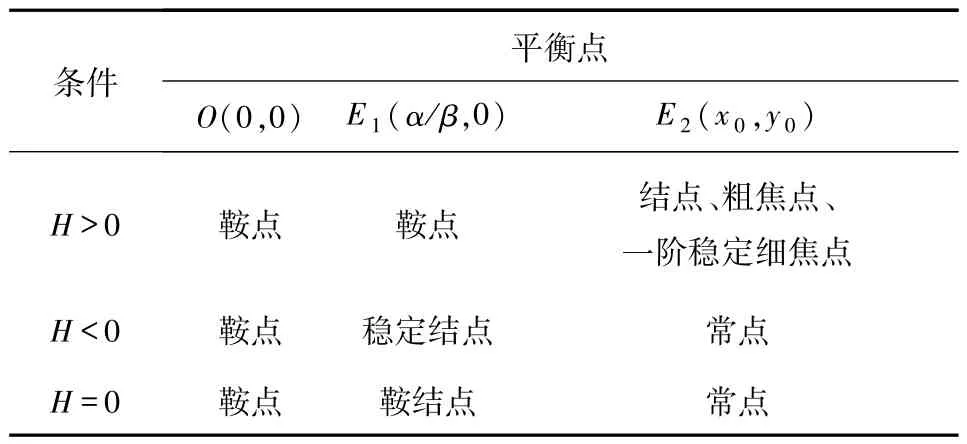
表1 c =0 时系统(1)的平衡点类型Tab.1 Types of equilibria in system(1)when c =0
当c≠0 时,发现系统(1)至多3 个平衡点,且其中2 个(O,E1)与c =0 时位置一样.下面要进一步确定这2 个平衡点类型是否发生变化,第3 个平衡点是否存在,及其位置类型与E2有何关系.
定理1.1当c≠0 且充分小时,系统(1)的平衡点O和E1的类型与表1 中完全一致,即c 在0附近变化不影响O和E1的类型.
证明下面仅对H =0 时证明E1的鞍结点类型不变,其他情形类似可证.令

仍用t表示时间,则系统(1)化为
计算可得系统(3)在平衡点E1处的雅可比矩阵的特征值为


即E1是一个退化平衡点.做变换

并仍将时间变量写作t,则系统(3)化为
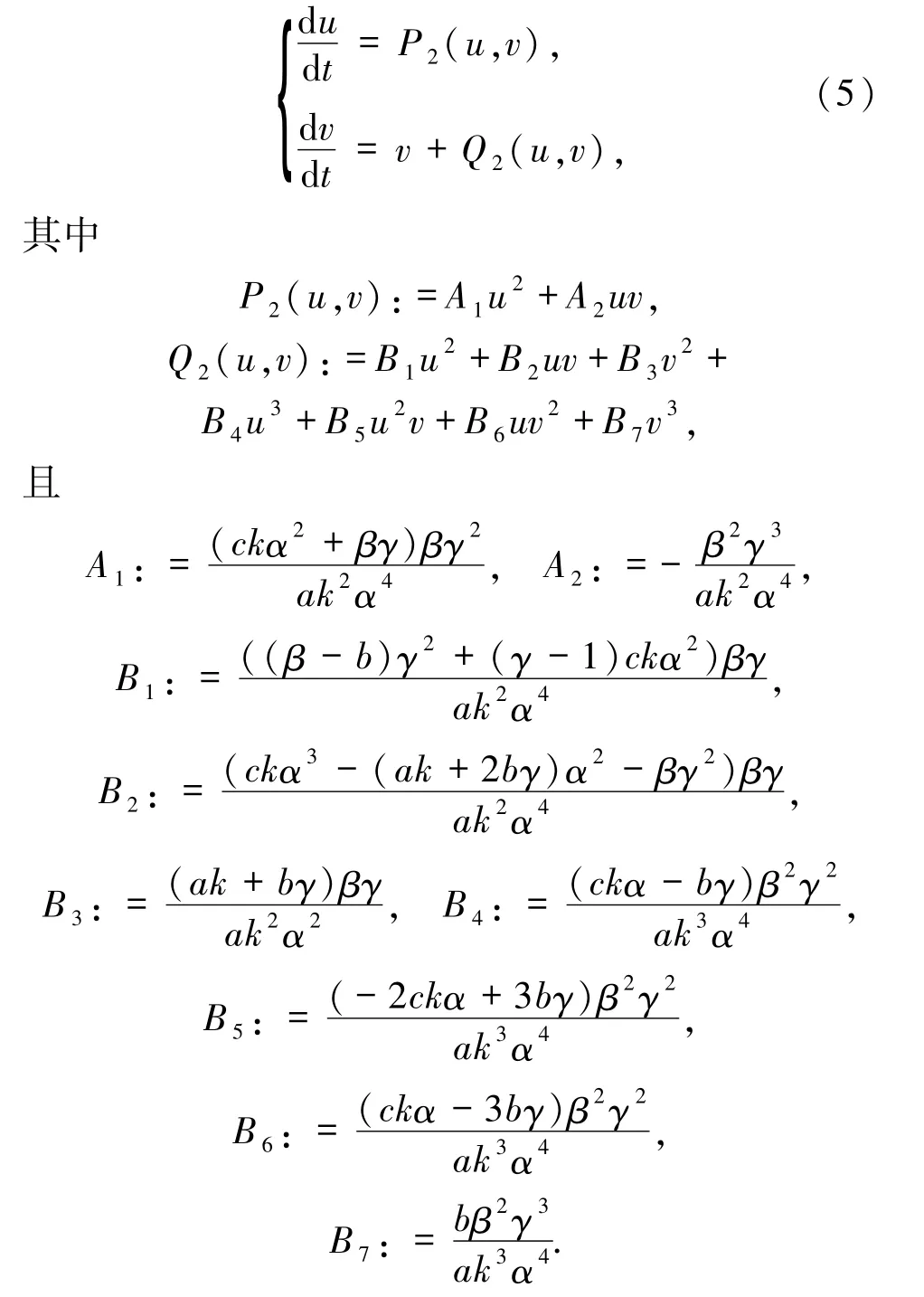
如同文献[16]的做法,由隐函数定理可知,存在解析函数φ(u)使得
把φ′(u)代入(6)式的左边,并用φ(u)代替(6)式中的v,通过比较u的各次幂的系数可解得

从而获得φ(u)的级数表达式.令ψ(u):=P2(u,φ(u)),计算可得

可见ψ(u)二次项的系数为正.由文献[16]可知,系统(5)的原点(0,0)是鞍结点.因此,系统(1)的退化平衡点E1是鞍结点.
下面判断鞍结点E1附近的轨线走向.取vu 平面的坐标轴上两点M(1,0)、N(0,1),根据变换(4)可计算得M对应于xy平面上一点M′(m,0),N 对应于xy平面上一点N′(n,1),其中
由此可知,vu平面的坐标轴返回到xy平面时,坐标轴位置如图1(a)所示.在vu 平面上,当u =0 时,dv/dt的符号由v 的符号决定,当v >0 时,dv/dt >0;当v <0时,dv/dt <0;当v =0时,du/dt 符号由A1u2的符号决定.由于A1>0,因此du/dt >0.由此可得vu平面上鞍结点O 附近坐标轴上的轨线走向,见图1(b).注意到,在变换(4)中,
因此,时间变换是反向的,从vu 平面返回xy 平面时,轨线方向相反.从而可得xy 平面鞍结点E1附近的轨线走向,易知鞍结点的结点结构位于第一象限,鞍点结构位于第四象限,见图1(c).
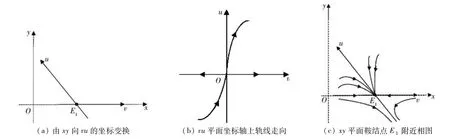
图1 坐标变换示意图Fig.1 Schematic diagrams for coordinate transformation
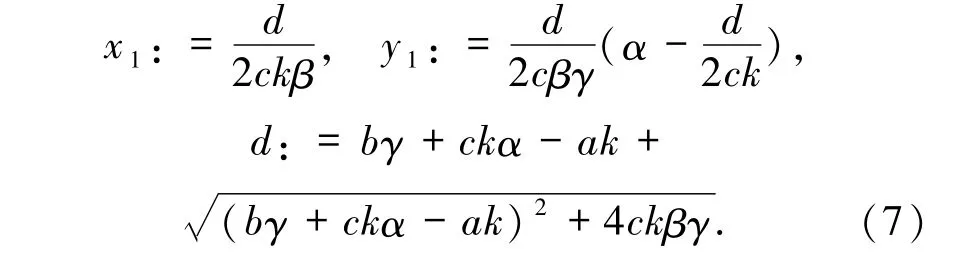
定理1.2当c≠0 且充分小时,系统(1)存在第3 个平衡点(x1,y1)的充要条件是H >0.当H >0时,(x1,y1)的类型与E2相同,且其位置趋于E2(c→0),其中
证明系统(1)的平衡点是方程组

的解.由于xy =0 时,有2 个平衡点O和E1,因此只需考虑xy≠0.易知,第3 个平衡点存在当且仅当
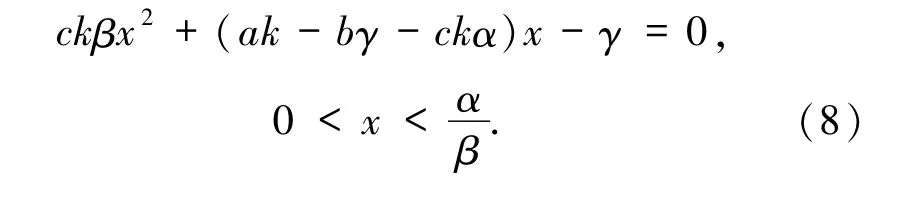
进一步,(8)式有解,当且仅当H >0,(8)式可得第3 个平衡点(x1,y1),其中x1、y1的表达式在(7)式中给出.
当c =0 时,系统(1)有第3 个平衡点E2(x0,y0).由x1、y1的表达式可知
当c =0 时,易知系统(3)在平衡点E2处的雅可比矩阵为
当c≠0 时,系统(3)在平衡点~E2(x1,y1)处的雅可比矩阵为
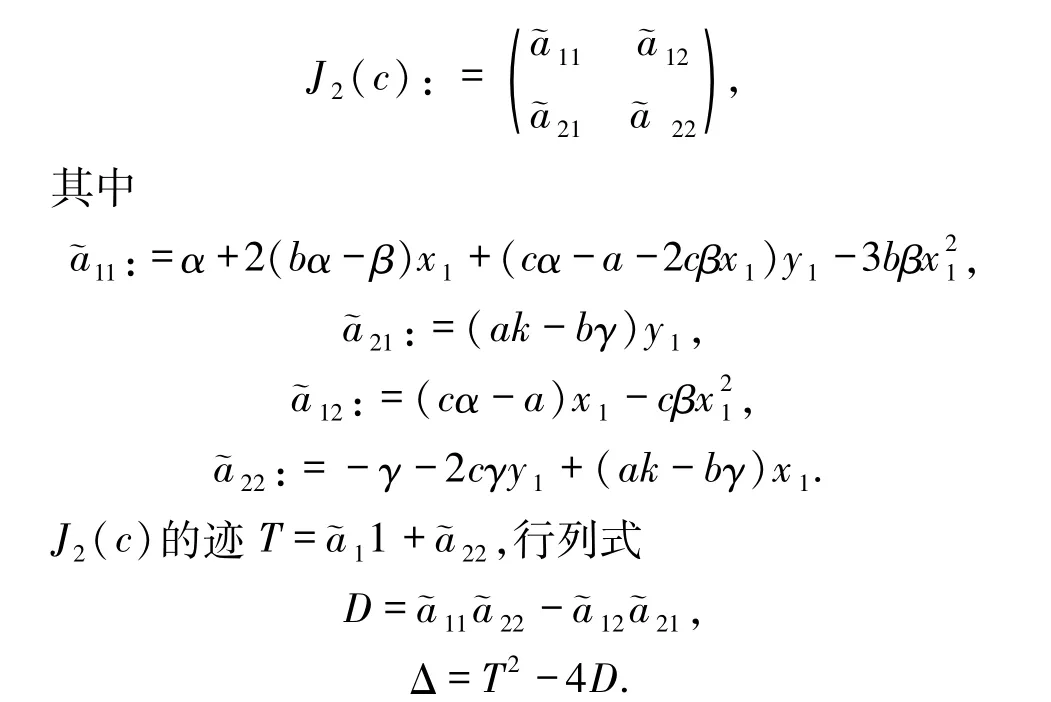
由于当c→0 时,(x1,y1)→(x0,y0),计算可知c→0时,J2(c)→J1.另一方面,E2不会是中心(见表1).因此,当c充分小时,与E2具有相同类型.
由定理1.1 和1.2 已知,c 在0 附近的变化并不影响平衡点类型和位置.虽然与E2的位置并不相同,但是→E2(c→0),所以可以看成位置不改变.定理1.1 和1.2 并没有给出c在0 附近的变化对平衡点稳定性的影响.实际上,由于O和E1的稳定性判定中不涉及c的值(见定理1.1 的证明),所以c在0 附近的变化对O和E1的稳定性并无影响.然而,c在0 附近的变化是可能对第3 个平衡点的稳定性产生影响的,继而导致分岔的出现.下面将详细讨论这一点.
2 分岔分析
如表1 所示,H >0 时才有第3 个平衡点,因此假设H >0.当E2为结点或粗焦点时,参数c在0 附近的变化并不改变其稳定性,即~E2与E2的稳定性相同.下面的定理是针对E2为一阶细焦点的情形.从雅可比矩阵J1(见定理1.2 的证明)的表达式,易知E2为一阶细焦点当且仅当

定理2.1设系统(1)满足(9)式.当c从0 变为充分小的负值时,系统(1)发生Hopf 分岔,唯一一个极限环分岔出来.这个极限环是稳定的且围绕.当c从0 变为充分小的正值时,系统(1)不发生Hopf分岔.
证明如同定理1.1 的证明,只需考虑系统(1)的等价系统(3).对(3)式做平移变换

并将X、Y写作x、y,得
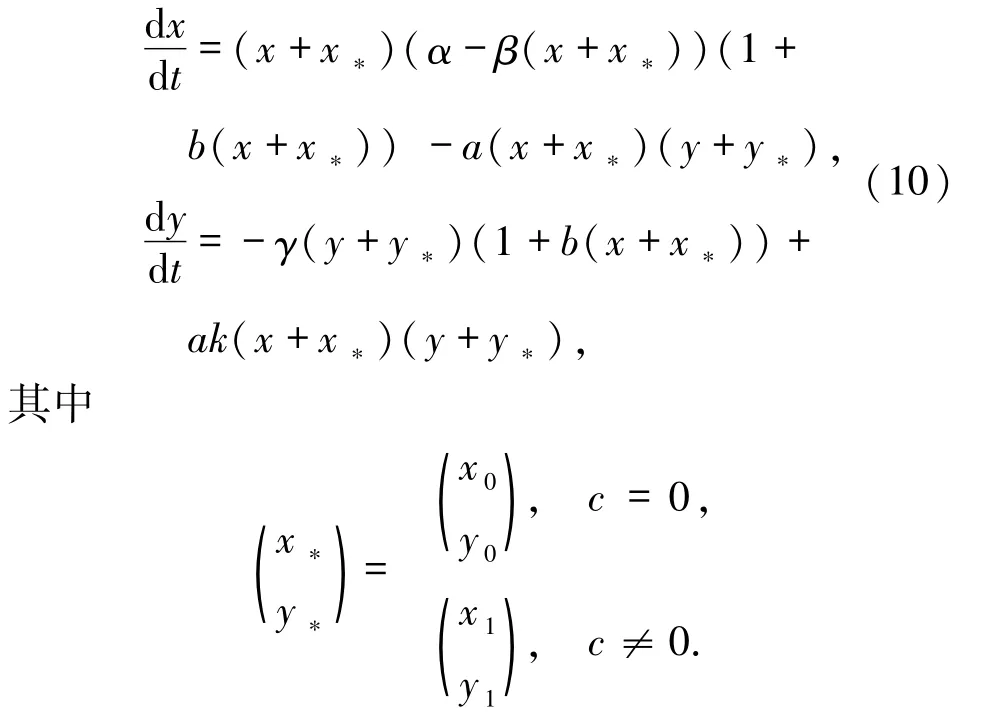
把系统(10)在O(0,0)的雅可比矩阵记为J(c).因此

其中J1、J2(c)在定理1.2 的证明中给出.由于当c→0时,J2(c)→J1,因此J(c)是连续的.令
系统(10)|c=0化为
其中H的表达式在(2)式中给出.由于此系统为中心型,计算其一阶焦点量g3,得

因此O是系统(10)|c=0的一阶稳定细焦点.由J(c)的连续性,当c≠0 且充分小时,系统(10)的平衡点O仍为焦点.由J2(c)的表达式可计算其迹T(c)在c =0 处的导数得

记J2(c)特征值的实部为μ(c).因此,μ(0)=0 且
又由(9)式可知

因此,μ′(0)<0.从而c从0变为充分小的正常数时,系统(10)的平衡点O从稳定一阶细焦点变为稳定粗焦点,不发生Hopf分岔.当c从0变为充分小的负常数时,系统(10)的平衡点O从稳定一阶细焦点变为不稳定粗焦点,发生一阶Hopf 分岔,唯一一个极限环从O分岔出来,且此极限环是稳定的.
一方面,系统(1)的Hopf 分岔在文献[13-15]中给出,由使用的c为正且分岔参数是多个参数复合的形式,并不能确定是哪个参数变动导致Hopf分岔.结合定理2.1 可知,该Hopf 分岔不是由c从0 变为充分小的正值产生的.另一方面,在文献[15]中,系统(1)的鞍结点E1被证明存在跨临界分岔.结合我们定理1.1 可知此跨临界分岔不是由c从0 向充分小的非零数变动导致的,即c 在0 附近变化时,系统(1)不发生跨临界分岔.
3 无穷远分析
根据文献[10-12]中关于系统(1)全局稳定性的结果,当系统(1)不存在正平衡点时,全局渐进稳定,此时对应H≤0.本文定理1中H =0时鞍结点E1在第一象限内的结点结构与该结论相一致.另一方面,当系统(1)存在正平衡点时,如果~E2为稳定结点或稳定焦点,即~E2局部渐进稳定,则全局渐进稳定;如果~E2为不稳定结点或不稳定焦点,则有且只有一个极限环,且极限环是稳定的,此时对应H >0.
下面分析系统(1)无穷远处轨线的走势.
定理3.1系统(1)在第一象限内有2 个无穷远平衡点A:(+∞,0)和B:(0,+∞),其中A为不稳定结点,B 为全退化平衡点.当cα -a =0 时,有无数条轨线沿离开B,单位圆周Γ上的轨道离开A趋近B.
证明对系统(3)做Poincaré变换,令
在α*平面上解出z =0 时的奇点是Q1(0,0)、Q2(-b/c,0).Q1处雅可比矩阵的迹T1=2βb >0,行列式

且特征矩阵对应于特征值βb 有无穷多特征向量,因此Q1是不稳定星形结点;Q2处雅可比矩阵的迹T2=-βb <0,行列式D2=0,因此平衡点Q2为退化平衡点.由于Q2返回到xy 平面后,不在第一象限内,不做具体讨论.此外,z =0 也是解,故赤道由奇点和轨线连成.
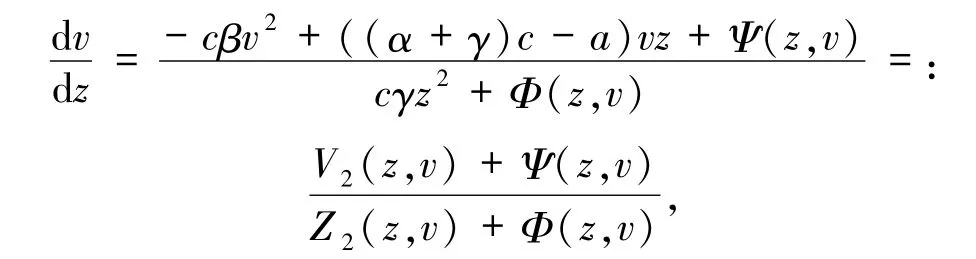
其中,Z2、V2分别是z和v的二次齐次多项式,

示性方程
当cα-a =0 时,G(θ)=-cβsin2θ cos θ.此时,示性方程有单根,有二重根θ3=0 和θ4=π.记


对于θ3=0 和θ4=π,θ3、θ4不是H(θ)=0 的根,

已知Φ(z,v)、Ψ(z,v)在(0,0)附近是z、v的解析函数,所以满足文献[16]的条件,从而在zv平面上,沿着各只有唯一轨线进入奇点Q3,有无数条轨线分别沿θ3=0,θ4=π 进入奇点Q3(此处及后文中的“进入”均指,当t→+∞或t→-∞时,轨线趋近于平衡点).将zv 平面变换为vz平面,则有无数条轨线分别沿进入奇点Q3,沿着θ3=0,θ4=π 各只有唯一轨线进入奇点Q3.
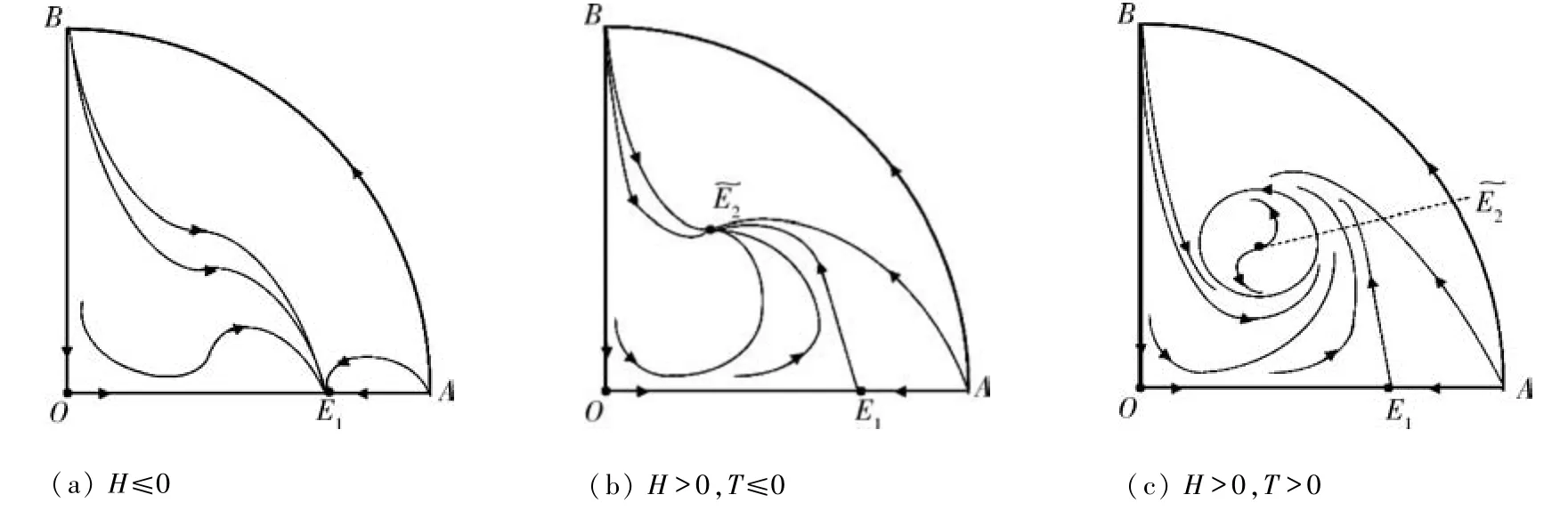
图2 cα-a =0 时,系统(1)全局相图Fig.2 Global phase diagrams of system(1)when cα-a =0
