环境测试室温度波动度的分析与对策
2022-01-18郑建福
郑建福
(1.广州智能装备研究院有限公司,广州 510700; 2.工业和信息化部电子第五研究所,广州 511370)
1 问题的提出
在某重点科学仪器项目中需要对测试样品提供2~8 m3容积大小,波动度优于±0.3 ℃的环境测试室。目前市场上能够找到环境测试室温度波动度指标最好的是日本ESPEC公司CWH-20A型8 m3环境测试室,其温度波动度指标是±0.5 ℃。温度波动度是该仪器最重要的技术参数之一,直接影响测试样品环境条件的一致性程度、测试结果的准确性、有效性。因此研究高稳定性测试环境室的相关技术,为精密仪器提供精密测试环境条件具有一定的意义。
2 温度波动产生的主要原因分析
2.1 机械制冷及工况调整带来温度波动
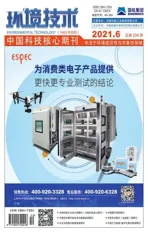
环境测试室的温度范围为20~70 ℃,为密闭环境并带有发热且变化热负载;必须为环境测试室配置制冷系统。考虑到仪器的使用方便性和温度范围,配置的是单级压缩机机械制冷系统如图1所示,系统由压缩机、冷凝器、蒸发器、节流元件及控制不同流量毛细管的电磁阀装置等部件组成。按常规设计,根据设备的测试状态不同,制冷系统自动开启,为设备的降温、低温,恒温等提供所需的冷量,从而达到满足环境测试室的性能指标的要求。一般的温度环境测试室为适应不同工况的要求,大多采用的是控制不同流量的毛细管以满足不同工况对制冷量的要求。在本项目中,由于负载工况的变化比较大,需要配置的毛细管型号比较多,虽然可以满足不同工况的要求,但是在工况或负载发热量变化时必须切换不同的毛细管,以进行流量调节保证温度达到设定值;在恒定状态时,流量的切换势必造成温度干扰,极端时可能会有3~5 ℃冲击,对被试样品产生不利的影响,造成:①相同的测试的条件,干扰大小不同造成过程的不一致;可能会引起测试结果偏差;②在极限高温测试条件下的温度过冲/波动过大,可能会造被试样品的测试应力加大,干扰或破坏了测试结果的正确性和准确性。
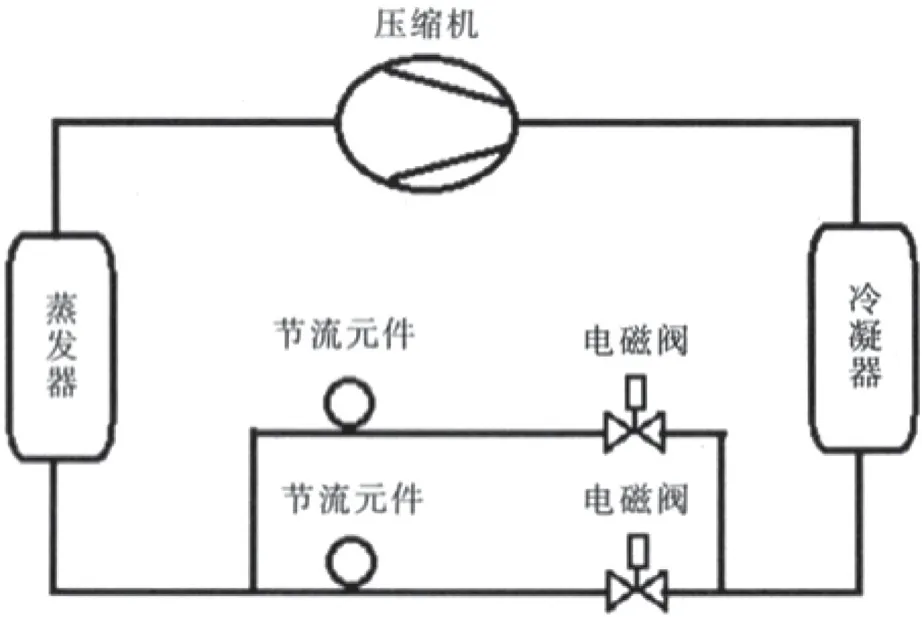
图1 制冷系统图
2.2 控制系统及算法带来的波动
影响测试室内温度波动的因数来自加热、制冷及两者的组合。温度控制的稳定与否需要:①加热控制的稳定性,一般情况下测试室采用电加热器—裸露的电加热丝—有较好的响应特性。由温度PID控制加热器工作,只要参数调整的合适稳定控制比较容易实现。②制冷控制的稳定性,制冷回路构成:压缩机—冷凝器—节流器件—蒸发器,影响的因数较多,且具有调节响应较电加热系统滞后大、慢的特性,稳定控制不易实现。如果采用毛细管流量切换还会造成温度干扰。③加热和制冷控制在工况变化时,经常会出现的互相影响,引起震荡波动。
3 温度稳定性解决对策
3.1 制冷系统方面
3.1.1 冷量无级调节
电子膨胀阀在空调行业中得到广泛应用[1],用于压缩机制冷系统中的流量无级调节,使制冷系统保持在最佳的运行工况,实现快速、连续稳定的温度控制,并起到节能等效果。毛细管加电磁阀系统与电子膨胀阀的区别见表1。为了解决毛细管切换引起冷量突变造成对环境测试室温度控制的干扰,引入电子膨胀阀为制冷系统的节流装置。
表1 毛细管加电磁阀通断与电子膨胀阀开度控制的对比
3.1.2 电子膨胀阀的控制—冷量需求及冷量控制实现
在单级制冷系统,利用蒸发器两端温度(压力)的差作为系统过热度比较易行,采用温度式过热度作为参数进行电子膨胀阀的控制。过热度控制采用PID控制算法,见图2。

图2 过热度PID 控制框图
3.1.3 电子膨胀阀控制过热度的具体实现
电子膨胀阀控制过热度的具体实现[2]:如图2所示,测量制冷系统中蒸发器的出入口温度/压力得到系统的过热度,根据与目标过热度的偏差由模糊自适应PID控制器通过计算得到PID调节器的输出,再将输出值转化为电子膨胀阀的开度, 由开度调节进入蒸发器的制冷剂流量,确保制冷系统按负载及工况的要求安全稳定运行。如图3所示,蒸发器的出入口温度/压力传感器(用于测量实际过热度)、电子膨胀阀、控制器、驱动电路等构成过热度的闭环反馈控制系统。控制器发控制命令给驱动电路,驱动电路驱动步进电机,步进电机带动阀芯,调整电子膨胀阀开度,进而调节进入蒸发器的制冷剂流量,从而对系统过热度进行控制。

图3 过热度控制回路框图
3.2 控制算法方面
3.2.1 平衡式温度控制(BTC)
为了保障箱体内温度高稳定性,箱体内温度控制采用BTC(平衡式温度控制),即制冷控制以冷量控制的方式,调节电子膨胀阀开度,且控制周期比较长,变化比较慢;温度控制由PID控制加热器输出,最终实现温度的稳定控制。
控制器根据设备的工作状态:设定的目标温度、箱体内温度、过热度,调节电子膨胀阀阀门开度;使进入箱体热交换器的冷量根据需要连续变化输出。具体分为几种工况:①快速降温时,冷量100 %输出;②慢速升/降温、温度快到达时,冷量输出小;③全速升温时,冷量输出为0;根据这几种工况,相应地用模糊表调整过热度控制目标,使之适应不同工况的要求,输出制冷量。如图4、图5所示。

图4 不同工况下模糊控制原则
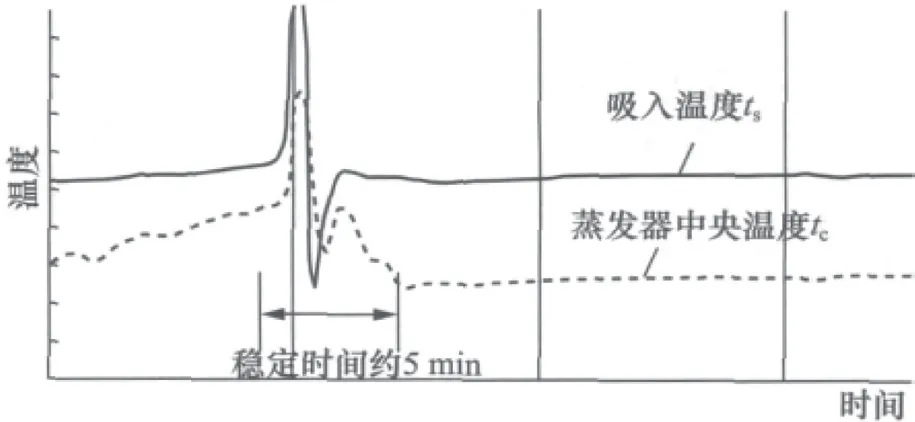
图5 PID 过热度控制过程
3.2.2 温度模糊自适应PID控制
如图6,根据调试经验建立e,ec对应的dkp,dki,dkd模糊表,用模糊自适应PID对加热器进行控制。相关的论述可以参考文献[3,4]的描述,这里就不赘述。

图6 箱内温度PID 控制框图
3.3 实际控制效果
如图7 所示,采用了上述多种技术的实际控制效果对比分析:采用毛细管+PID控制时,①图中点a、c、e、g温度过冲比较大;其中点a,温度过冲4.1(最高温度为74.1℃),加大了应力,或可能会造成样品的损伤,影响测试结果;②图中点b、d由于样品通电工作,导致温度波动;③图中点f、h温度上漂后切换到大冷量毛细管导致温度波动;采用电子膨胀阀+模糊工况自适应PID控制克服了毛细管+PID控制方案的各种不足。
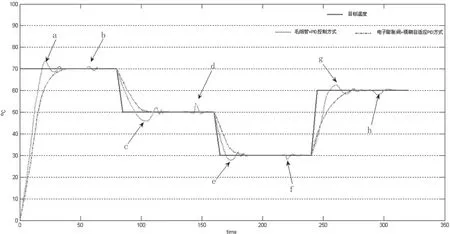
图7 实际控制效果对比
根据计量检测报告,实测温度波动度±0.07 ℃,大大优于技术指标±0.3 ℃的要求。
4 结论
本文就测试测试室温度波动度影响的因数进行了分析,提出了一些可以提高性能指标的方法并在实际应用中证明有效。