高地隙自走式喷雾机底盘悬架减振特性分析
2022-01-18李中祥温浩军王国良周倩倩
李中祥,温浩军,2,王国良,周倩倩
(1.石河子大学机械电气工程学院,新疆石河子 832000;2.农业部西北农业装备重点实验室,新疆石河子 832000)
0 引 言
【研究意义】2020年新疆棉花种植面积约为250.19×104hm2(3 752.9万亩),占全国总种植面积的78.9%[1],新疆全年棉花病虫害累计发生面积为145.97×104hm2(2 189.86万亩)次,占新疆棉花种植面积的58.35%[2],高地隙自走式喷雾机广泛应用于新疆棉花植保作业中[3]。但是由于其车身质量大、喷杆展幅宽、作业工况复杂,在作业过程中车身振动会造成喷杆振动幅度过大,影响喷雾机施药效率和作业质量[4~6]。【前人研究进展】John Deere、AGCO、现代农装、奥凯等公司所研发的自走式喷雾机都采用了四轮独立式悬架系统[7-9]。陈雨等[10]设计基于摩擦阻尼的空气悬架,以空气弹簧作为减振元件,并引入尼龙摩擦块作为阻尼,建立动力学方程,对模型进行仿真分析并进行试验验证,得到悬架系统的减振效果。乐飞翔等[11]针对MAZZOTTI自走式喷雾机的联通式油气悬架,采用ADAMS、AMESim等仿真软件进行整机的平顺性仿真试验。【本研究切入点】针对高地隙自走式喷雾机底盘离地间隙大、作业路况复杂等作业特点,提出一种新的底盘气液组合悬架减振结构。【拟解决的关键问题】采用振动加速度传感器,采集喷雾机在不同路面下车架的振动加速度,分析车架和马达支架的振动加速度,评价气液组合悬架的减振特性。研究在不同路面下和行驶速度下喷雾机气液组合悬架的减振特性,为高地隙自走式喷雾机田间作业的稳定性提供理论依据。
1 材料与方法
1.1 材 料
1.1.1 悬架结构
气液组合悬架系统,车架与行走装置之间通过空气弹簧、液压油缸和仿形摆臂相连,其中仿形摆臂的前端与轮胎支架的轴承座焊接在一起,后端通过销轴与车架铰接在一起,上端和空气弹簧、减振油缸的下端相连,空气弹簧和减振油缸的上端与车身相连。当喷雾机行走在不平路面时,轮胎的起伏会带动仿形摆臂的上下摆动,空气弹簧和液压油缸压缩或伸张进行减振。
当作业路面比较平缓时,地面对于轮胎的冲击比较小,仿形摆臂摆动的幅度也比较小,空气弹簧可以吸收来自地面的冲击,起到主减振作用;当作业路面起伏比较大时,地面对于轮胎的冲击也比较大,仿形摆臂的摆动的幅度也比较大,这时空气弹簧和液压减振系统共同工作,而且液压油缸通过单向阀、阻尼阀与蓄能器相连,又可以起到阻尼衰减振动的作用。图1
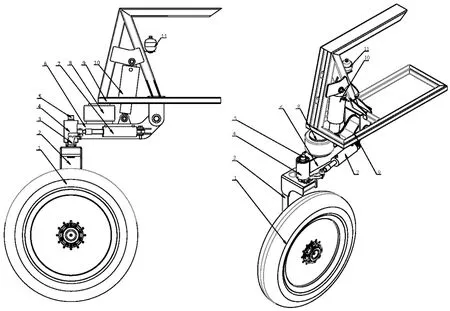
注:1.轮胎,2.马达支架,3.转向支撑臂,4.轴承座,5.马达支架转轴,6.仿形摆臂,7.转向油缸,8.空气弹簧,9.车架,10.减振油缸,11.蓄能器
1.1.2 喷雾机
喷雾机底盘采用龙门式结构,有效降低整机重心高度,提高底盘稳定性;药箱置于龙门式结构两侧,提高整机的适应性和通过性;整机驱动采用国际上主流的静液压全时四轮驱动系统,速度控制采用电比例控制方式,机器的高速和低速两档可切换。表1
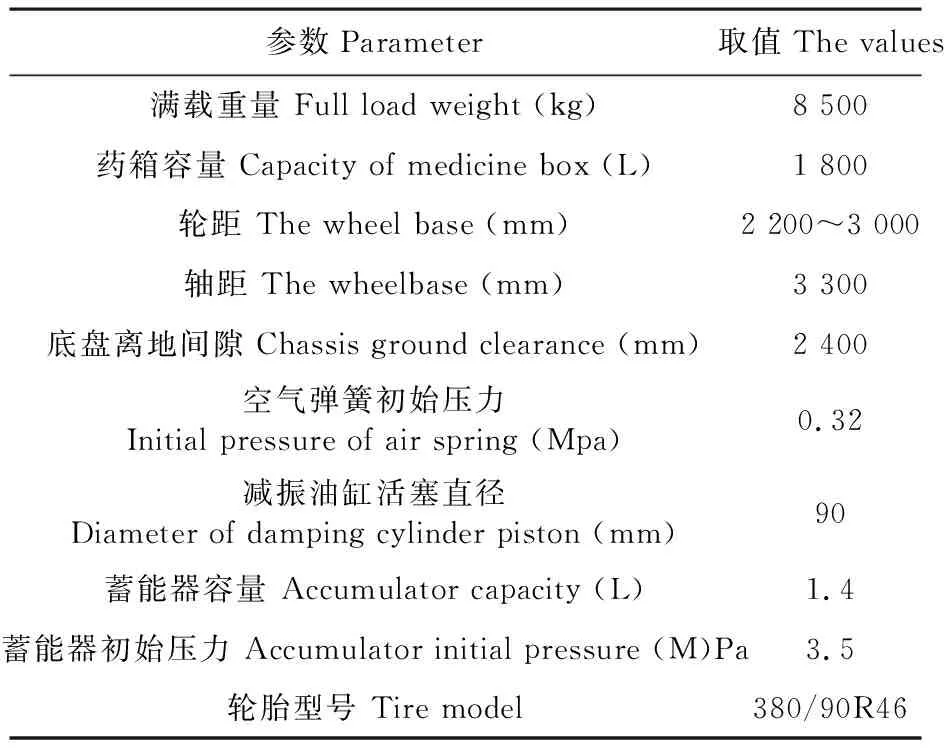
表1 喷雾机主要参数Table 1 Main parameters of sprayer
1.1.3 测试仪器
采用传感器为IEPE压电式加速度传感器(东华测试,型号1A314E,轴向灵敏度:100 mV/g,量程±50 g,工作温度-40~120℃,频率响应(10%)0.5~7 000 Hz);动态采集分析仪器型号东华测试DH5922D,共16通道,每通道具有独立的16位A/D,独立的DSP,并行同步采样;DHDAS V6.0软件平台,包括底层驱动程序、通讯协议等,集成数据采集、分析等功能。图2

图2 试验测试仪器Fig.2 Test instrument
1.2 方 法
1.2.1 试验设计
试验地点选择在石河子市石总厂三分场二连,测试路面分别选取田间路面和起伏较大的砂石路面。在不同等级的路面下以平均车速为3、5和8 km/h均速行驶,药箱装满药液。将加速度传感器分别安装在马达支架(气液组合悬架减振前的位置)、车架(气液组合悬架减振后的位置),将加速度传感器与DHDAS动态采集分析仪器连接,在软件中选择设置合适的采集参数并记录传感器数据。在测试过程中前30s为喷雾机起步阶段,在后续分析过程中除去其加速度数据,选取中间时间段速度较稳定时的车身加速度,作为分析自走式喷雾机行驶减振特性的依据。图3
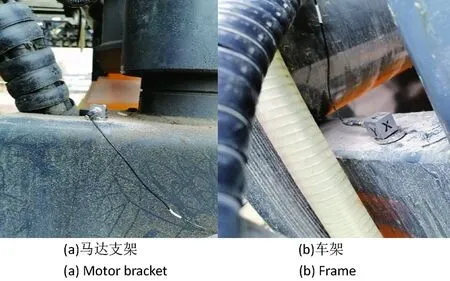
图3 传感器安装位置Fig.3 Sensor installation location
1.2.2 评价标准
路面不平度和喷雾机的行驶速度形成了对喷雾机振动系统的输入,该输入经过轮胎、马达支架、气液组合悬架传至车架构成了整个喷雾机振动系统的传递,得到了振动系统的输出时车架的振动加速度,该振动加速度的大小来反映悬架系统的减振效果[11]。
高地隙自走式喷雾机,在作业过程中行驶速度比较慢,影响车体的振动主要为垂向振动,评价喷雾机底盘悬架的减振特性时,考虑垂向振动加速度和垂向振动加速度均方根值,加速度传感器所记录的加速度时域响应的时间历程a(t),计算其加速度均方根值[12]:
(1)
式中,T为振动的分析时间。
2 结果与分析
2.1 喷雾机田间不同速度行驶减振特性
研究表明,喷雾机分别以速度3、5和8 km/h在田间行驶时,当喷雾机以3 km/h的速度在田间行驶时,其马达支架的振动加速度均方根值为2.225 m/s2,车架振动加速度均方根值为0.658 m/s2;当喷雾机以5 km/h的速度在田间路面上行驶时,其马达支架的振动加速度均方根值为2.647 m/s2,车架振动加速度均方根值为0.834 m/s2;当喷雾机以8 km/h的速度在田间路面上行驶时,其马达支架振动加速度均方根值为3.263 m/s2,车架振动加速度均方根值为1.106 m/s2;路面的冲击经过气液组合悬架减振之后,传至车架的振动加速度明显降低,气液组合悬架具有良好的隔振作用。图4
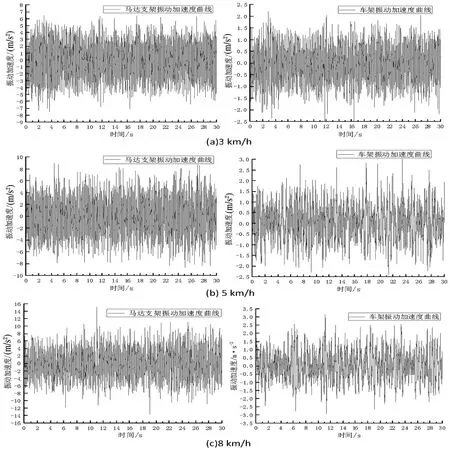
图4 喷雾机田间行驶时振动加速度应曲线Fig.4 Response curve of vibration acceleration when the sprayer runs in the field
2.2 喷雾机在砂石路面上不同速度行驶减振特性
研究表明,喷雾机分别以速度3、5和8 km/h在砂石路上行驶时,当喷雾机以3 km/h的速度在砂石路上行驶时,其马达支架的振动加速度均方根值为2.626 m/s2,车架的振动加速度均方根值为0.798 m/s2;当喷雾机以5 km/h的速度在砂石路上行驶时,其马达支架的振动加速度均方根值为2.959 m/s2,车架的振动加速度均方根值为0.967 m/s2;当喷雾机以8 km/h的速度在砂石路上行驶时,其马达支架的振动加速度均方根值为3.639 m/s2,车架的振动加速度均方根值为1.283 m/s2,路面的冲击经过气液组合悬架减振之后,传至车架的振动加速度明显降低,气液组合悬架具有良好的隔振作用。图5
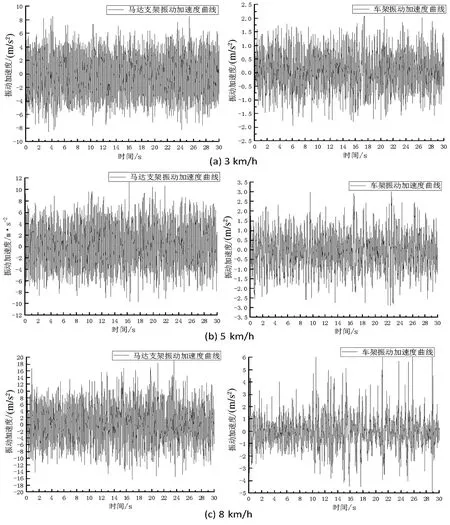
图5 喷雾机石子路上行驶时振动加速度应曲线Fig.5 Response curve of vibration acceleration when the sprayer runs on gravel road
3 讨 论
当路面激励相同时,随着喷雾机作业速度的增加,喷雾机底盘的振动幅度逐渐增大,喷雾机在作业过程中要选择合适的作业速度,即能保证喷雾机在作业过程中的行驶平顺性,也可以减少喷杆的振动,提高喷雾机的作业效果;当喷雾机以相同的速度分别在田间路面和砂石路面行驶时,在砂石路面上时的振动加速度均方根值要高于在田间路面上行驶时的加速度均方根值,主要因为石子路面的硬度大于田间路面,路面更粗糙,路面激励更大,所以,喷雾机的振动幅度也比较高。表2
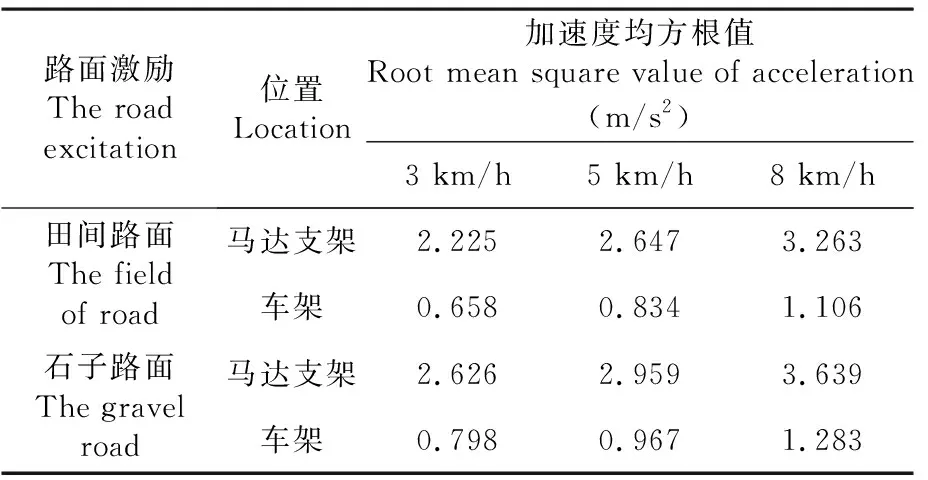
表2 振动加速度均方根值对比Table 2 Comparison table of root mean square values of vibration acceleration
当喷雾机在以3、5和8 km/h的速度在田间行驶时,其路面激励经过气液组合悬架减振后,振动传至车架时的振动加速度均方根值分别为0.658、0.834和1.106 m/s2,相对比马达支架的振动加速度均方根值,车架的均方根值降低了70.43%、68.49%、66.10%;当喷雾机当喷雾机在以3、5和8 km/h的速度在砂石路上行驶时,其路面激励经过气液组合悬架减振后,振动传至车架时的加速度均方根值分别为0.798、0.967和1.283 m/s2,相对比马达支架的振动加速度均方根值,车架的均方根值降低了69.61%、67.32%、64.74%;随着路面的粗糙程度和作业速度的增加,经气液组合悬架的减振后,其车架的振动加速度均方根值的降低率均在64%以上,说明气液组合悬架在喷雾机作业过程中,具有良好的隔振效果。
4 结 论
当喷雾机在以速度3、5和8 km/h在田间行驶时,路面激励经过气液组合悬架减振后,传至车架时的振动加速度均方根值分别降低了70.43%、68.49%、66.10%,当喷雾机在以速度3、5和8 km/h在砂石路上行驶时,路面激励经过气液组合悬架减振后,传至车架时的振动加速度均方根值分别降低了69.61%、67.32%、64.74%,随着路面的粗糙程度和作业速度的增加,经气液组合悬架的减振后,其车架的振动加速度均方根值的降低率均在64%以上,气液组合悬架具有良好的减振效果。
