基于能量-方位特征的声自导鱼雷扫频干扰器识别方法
2022-01-15杨向锋
王 丹, 杨向锋, 赵 伟, 肖 霖
基于能量-方位特征的声自导鱼雷扫频干扰器识别方法
王 丹, 杨向锋, 赵 伟, 肖 霖
(1. 中国船舶集团有限公司 第705研究所, 陕西 西安, 710077; 2. 水下信息与控制国防重点实验室, 陕西西安, 710077)
扫频干扰器是对抗水下声自导鱼雷目标检测的重要干扰器材之一。为了提高声自导鱼雷对扫频干扰器的识别能力, 文中分析了扫频干扰器对水下目标检测的干扰机理, 根据目标识别时声自导鱼雷接收到的扫频信号能量与方位特征参数, 提出了一种基于能量与方位特征联合识别扫频干扰器的方法, 通过对鱼雷接收到的信号进行数字化处理, 提取接收信号的能量与方位特征, 并对2个特征参数值进行加权数据融合, 利用融合结果进行目标识别。该方法采用主动检测方式, 并综合2个特征参数进行识别判断, 改善了采用单特征参数进行识别可能造成误判的不足, 增加了识别的可靠性。仿真验证了文中方法的有效性。
鱼雷; 扫频干扰器; 能量特征; 方位特征; 数据融合
0 引言
扫频干扰器是一种常见的装备于舰艇、潜艇上, 用于对抗声自导鱼雷探测、跟踪和攻击的水声对抗器材, 其工作过程为: 舰艇或潜艇发现来袭鱼雷, 并在来袭鱼雷航路上布放扫频干扰器, 通过发射高频宽带强功率扫频噪声, 对声自导鱼雷探测进行干扰, 降低其接收端的信噪比, 影响其探测性能, 以提高舰艇潜艇的生存能力。扫频干扰器噪声谱级远大于鱼雷探测目标的辐射噪声谱级和目标回波的谱级, 频带能覆盖已知的鱼雷探测系统工作频带。在一个相对较短的时间内, 干扰信号表现为窄带信号或单频信号, 造成鱼雷探测虚警。在一个相对较长的时间内, 干扰信号表现为宽带信号, 目标回波和辐射噪声被扫频信号淹没, 造成目标丢失。鱼雷能否有效地识别扫频干扰信号并在干扰源干扰的条件下正确探测目标, 是检验其探测系统的重要指标。
目前水下对抗干扰器的方法为, 首先采用主动方式检测目标, 采用门限自适应技术使门限随着背景干扰强度变化而调整, 干扰信号抬高主动检测门限, 抑制了干扰器对主动检测带来的虚警, 目标被干扰器遮盖, 此时开启被动方式检测, 使用方差统计技术实现对干扰器的检测, 确认干扰信号, 识别出干扰器[1]。这种检测方法采用主被动检测结合方式, 以被动方式检测方差信息作为判别标准, 在近距离难以区分目标辐射噪声信号和扫频干扰器信号, 可能造成误判。文中采用主动检测方式识别扫频信号, 综合能量与方位2个特征参数联合判断, 从而在主动声自导方式下有效识别扫频干扰器。
1 声自导鱼雷扫频干扰器识别
1.1 扫频干扰器模型
扫频干扰信号是一种按照频率步进产生的动态干扰信号, 带宽较宽, 能覆盖声呐工作频率, 干扰信号能量可以集中在每个扫频频点[2], 干扰效率高。文中以线性扫频信号为研究对象, 该信号是在一个扫频周期内, 扫频频率随时间线性变化的信号, 其时域表达式为[3]

扫频信号的时间-频率变化关系如图1所示, 其中,f表示信号的最高频率。

图1 线性扫频干扰信号时间-频率关系
1.2 接收信号预处理
鱼雷进行水下目标探测识别时, 通过其接收信号中包含的关键信息来达到辨识效果[4], 不同的目标类别, 用于识别其类型的关键特征参数有所差别。扫频干扰信号的能量值在全频带都较高, 背景噪声信号能量值则比扫频干扰信号低, 有目标时, 回波信号的能量值仅在目标频段出现峰值, 所以能量分布可以作为识别扫频干扰信号的特征信息。另外, 扫频干扰信号的方位值为扫频干扰器位置信息, 全频带具有一致性, 背景噪声信号的方位值随机, 有目标时, 目标回波信号的方位值仅在目标频段附近稳定收敛, 所以方位分布可以作为识别扫频干扰信号的另一个特征信息。文中在分析基阵接收信号的能量信息与方位信息的基础上, 进一步提取更加有效的特征信息, 实现扫频干扰器识别。
在提取关键特征参数之前, 首先完成对所接收信号的预处理, 声呐系统对检测周期内的时域波束进行数字采样, 然后按时间将数字序列分为若干帧, 通过傅里叶变换, 将时域帧信号转换到频域, 在频域上获取各帧各频点处的能量信息, 并通过分裂波束互谱法完成方位信息的提取[5-6], 过程如下。

获取各帧各频点处的能量值

各帧各频点处的相位

1.3 特征参数提取
1.3.1 能量特征参数提取


获得的能量最大值集合

能量最大值对应的帧号集合



1.3.2 方位特征参数提取
各帧各频点处的方位值

获得的能量最大值序列对应的方位集合为



按下式计算方位特征值
1.4 数据融合
对同一目标噪声信号, 能量特征为最显著的特征参数, 单个能量特征能部分识别出干扰与目标信号, 但是对于信噪比很高的干扰信号, 使用单个能量特征会造成误判。方位特征是在能量值判断基础上提取的特征, 对于目标信号和干扰信号具有明显的特征表现, 将能量特征与方位特征通过数据融合来完成目标识别, 能够增加对目标判别的可信度, 方法如下。
由于各个特征的量纲和参数表达不同, 为了消除不同单位在数据融合过程中所造成的影响, 需要对特征进行归一化处理, 各个特征的归一化表达式为

2 仿真结果与分析
声自导鱼雷采取主动声自导方式进行水下探测目标时, 接收到的信号包括噪声、混响以及目标回波。
噪声主要为背景噪声和自噪声, 由于背景噪声远大于自噪声,不单独仿真自噪声, 接收到的背景噪声基本上是稳态的, 使用高斯白噪声仿真。混响伴随声呐发射信号产生, 由水下存在的大量散射体对入射声信号产生的散射波在接收点叠加形成[8]。目前模拟混响的理论模型有基于点散射的模型、单元散射理论和统计模型[9-10]。文中从工程及实用角度出发, 采用高斯白噪声通过窄带滤波器, 再乘以混响包络曲线来实现混响的仿真。混响包络曲线来自某一实测海域的混响包络曲线。声自导鱼雷接收到的目标回波以单频发射信号加多普勒频移仿真。
能量检测仿真中, 不同情况下的能量最大值分布图如图2~图4所示。
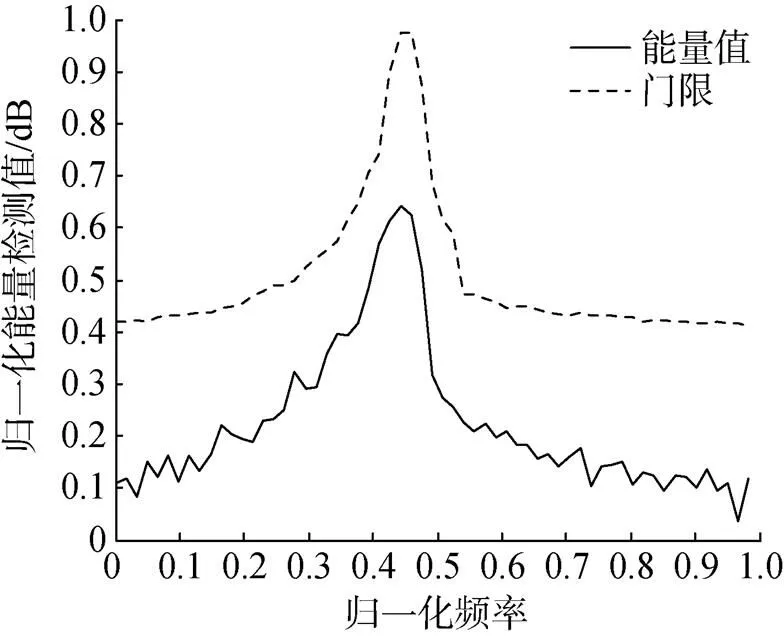
图2 无干扰器无目标时能量最大值分布图
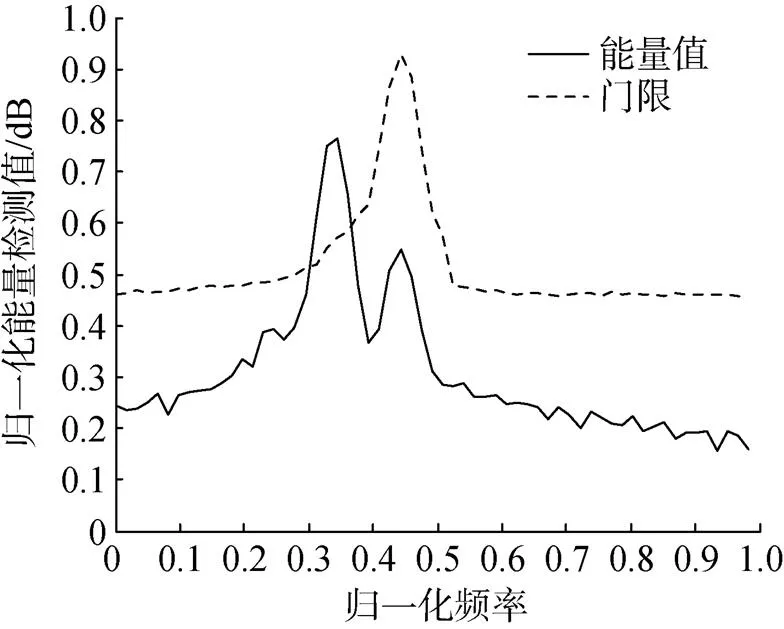
图3 有目标时能量最大值分布图
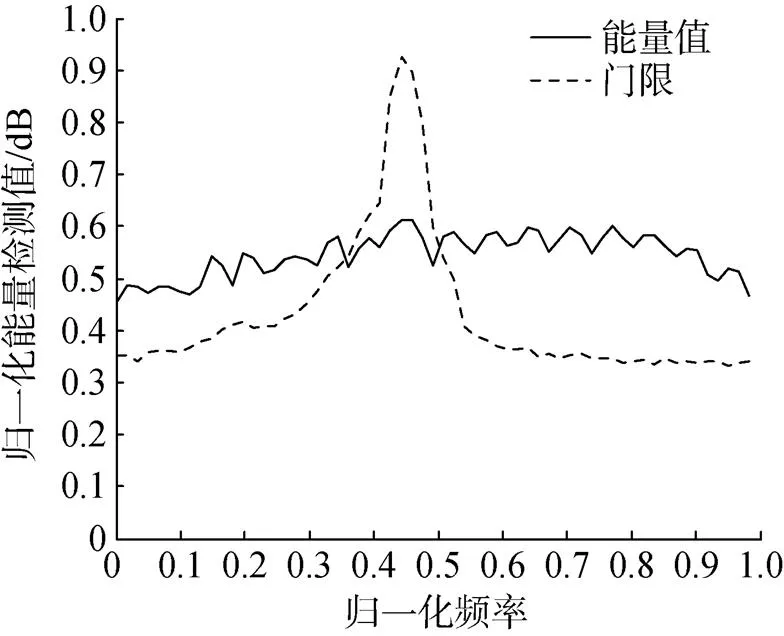
图4 有扫频干扰器时能量最大值分布图
从图中可以看出, 在没有目标和扫频干扰器的情况下, 能量最大值在门限以下; 有目标时, 在目标频点处能量最大值高于门限; 扫频干扰器存在后的能量最大值在全频带整体较高。
方位检测仿真中, 不同情况下的方位检测图如图5~7所示。从图中可以看出, 在没有目标和扫频干扰器的情况下, 方位值在全频带分布随机; 有目标时, 在目标频点处方位值具有一致性; 扫频干扰器存在后方位值在全频带稳定收敛。
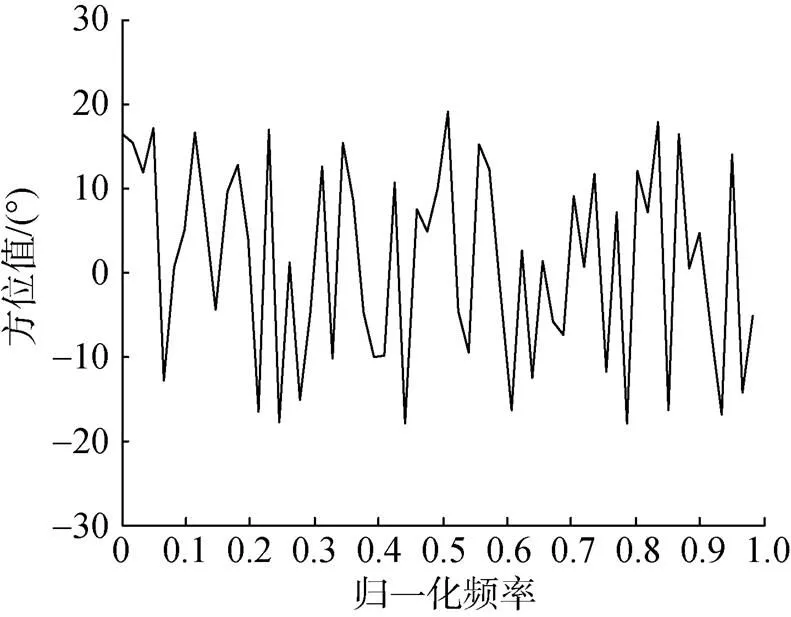
图5 无干扰器无目标时方位图
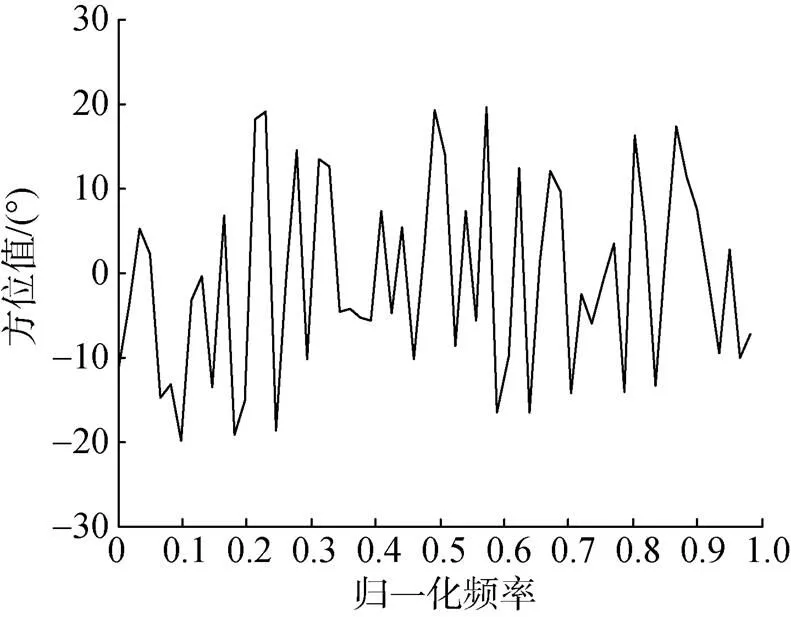
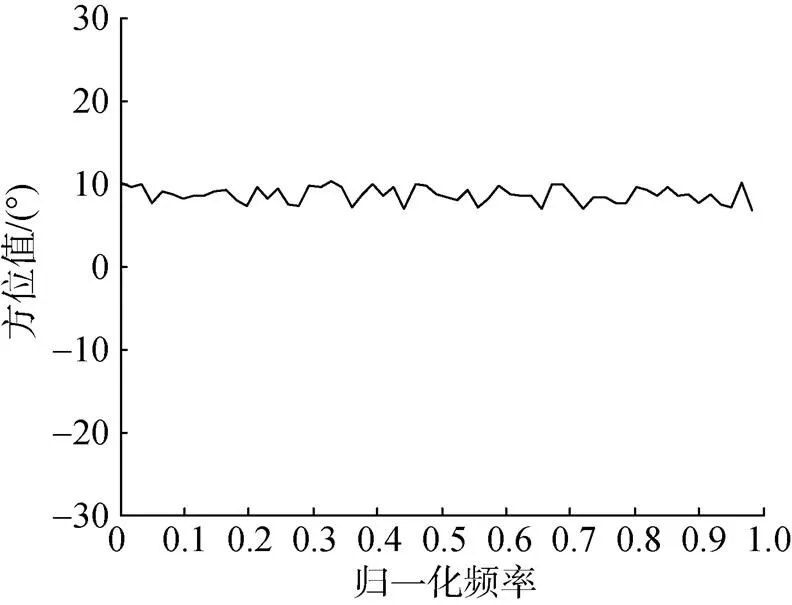
图7 有扫频干扰器时方位图

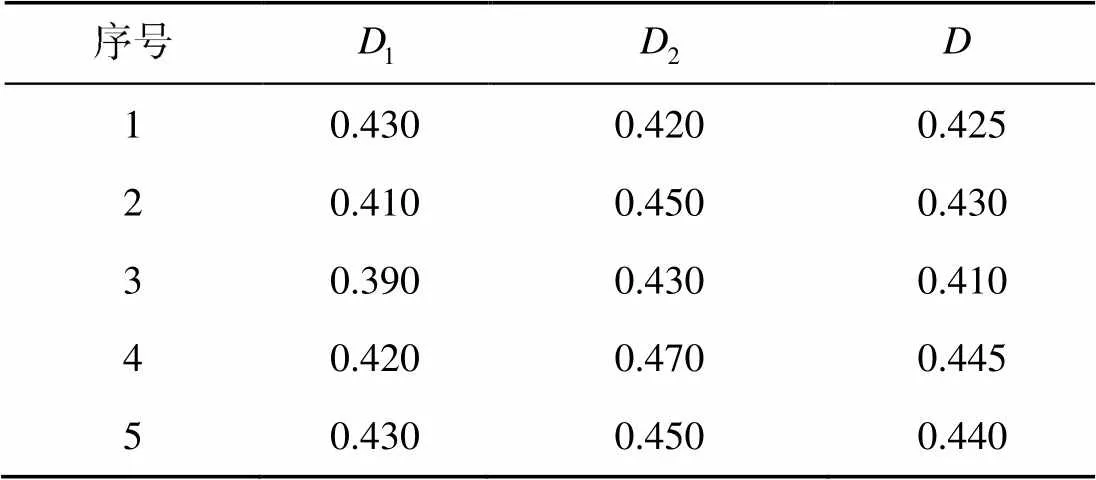
表1 无干扰器无目标时模糊融合结果数据
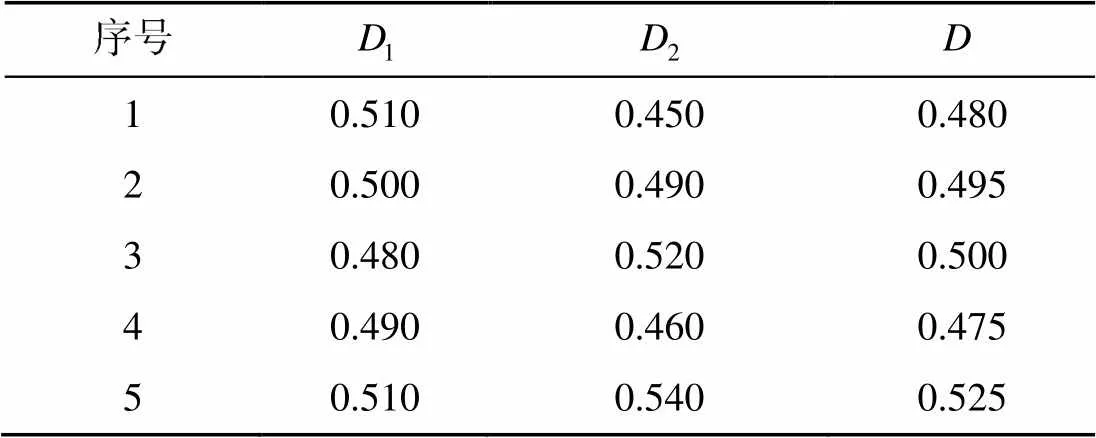
表2 有目标时模糊融合结果数据

表3 有扫频干扰器时模糊融合结果数据
3 结束语
扫频干扰器作为一种干扰鱼雷探测目标的干扰源, 其干扰稳定有效, 具有较高的干扰效能。基于声自导鱼雷接收到的扫频干扰信号具有全频带内能量值较高, 以及方位值稳定收敛的典型特征, 文中提出一种基于能量-方位特征联合识别扫频干扰器的方法, 通过将声自导鱼雷接收到的信号经过数字信号处理, 提取能量特征和方位特征, 并对其进行数据融合, 以融合指标识别扫频干扰器, 这种方式通过主动检测完成, 弥补了通过单个特征值进行识别导致的误判问题, 增加了识别的可信度。通过以鱼雷接收的理论信号为基础进行仿真, 验证了该方法的有效性。后续在实际工程应用中还需结合声信道特性做进一步的算法优化。
1. 宋琼, 闫晟, 郝程鹏, 等. 一种适用于水下距离徙动目标的稳健自适应检测算法. 2021, 29(5): 533-540.
2. 冷继华, 李永胜, 吕林夏, 等. 基于生成对抗网络的水下样本生成方法. 2021, 29(1): 74-79.
3. 张倩, 张友梅, 李晓磊,等. 基于自监督表征学习的海面目标检测方法. 2020, 28(6): 597-603.
4. 杨向锋, 熊淑贞, 石磊. 声自导鱼雷目标跟踪误差仿真与分析. 2020, 28(5): 520-525.
5. 罗海力, 徐达, 陈模江, 等. Pareto Ⅱ型分布混响中距离扩展目标CFAR检测. 2020, 28(1): 18-23.
6. 张舒皓, 马晓川, 杨力, 等. 基于多片高性能DSP的主动声呐低速运动小目标探测系统. 2019, 27(6): 636-643.
7. 范威, 朱代柱, 张德泽, 等. 混合高斯模型和Radon变换用于声呐图像背景抑制. 2018, 26(5): 492-497.
[1] 易红, 郝保安, 肖霖. 声自导鱼雷对抗宽带噪声干扰器技术研究[J]. 鱼雷技术, 2004, 12(1): 23-25.
Yi Hong, Hao Bao-an, Xiao Lin. The Development of Acoustic Homing Torpedo Technology to Counter the Broadband Noise Interference Unit[J]. Torpedo Technology, 2004, 12(1): 23-25.
[2] 周新, 姚富强, 牛英滔. 一种线性扫频干扰信号的参数估计方法[J]. 通信技术, 2016, 49(12): 1582-1587.
Zhou Xin, Yao Fu-qiang, Niu Ying-tao. Parameter Estima- tion of Linear Chirp Signal[J]. Communications Techn- ology, 2016, 49(12): 1582-1587.
[3] 刘大利, 刘云涛, 蔡惠智. 水下连续波有源探测的回波检测算法[J]. 声学学报, 2014, 39(2): 163-169.
Liu Da-li, Liu Yun-tao, Cai Hui-zhi. An Echo Detection Algorithm for Underwater Continuous Wave Active Detection[J]. Acta Acustica, 2014, 39(2): 163-169.
[4] 焦义民, 康春玉, 曾祥旭. 舰船辐射噪声非线性频谱特征提取与应用[J]. 舰船科学技术, 2016, 38(12): 65-68.
Jiao Yi-min, Kang Chun-yu, Zeng Xiang-xu. Extraction and Application in Nonlinear Spectrum Feature of Ship Radiated Noise[J]. Ship Science and Technology, 2016, 38(12): 65-68.
[5] 夏庆生. 基于互谱法的水下目标定位及区域控制技术[J]. 鱼雷技术, 2016, 24(1): 33-36.
Xia Qing-sheng. Underwater Target Localization and District Control Based on Cross-Spectrum Method[J]. Torp- edo Technology, 2016, 24(1): 33-36.
[6] 朱峰, 朱元林, 刘松海. 一种基于互谱法的鱼雷末弹道定位方法[J]. 水下无人系统学报, 2019, 27(1): 93-96.
Zhu Feng, Zhu Yuan-lin, Liu Song-hai. A Location Method of Torpedo Terminal Trajectory Based on Cross Spect- rum Method[J]. Journal of Unmanned Undersea Systems, 2019, 27(1): 93-96.
[7] 钱韬. 线阵分裂波束处理技术在水声探测中的应用[J]. 声学技术, 2015, 34(6): 551-555.
Qian Tao. Application of Split-beam Processing of Line Array in Underwater Acoustic Detection[J]. Technical Ac- oustics, 2015, 34(6): 551-555.
[8] 刘伯胜, 雷家煜. 水声学原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 2009.
[9] 奥里雪夫斯基 B B. 海洋混响的统计特性[M]. 北京: 科学出版社, 1977.
[10] 郭燕子, 李国良, 张福生. 一种工程化的海洋混响仿真模型研究[J]. 舰船电子工程, 2018, 38(10): 123-125
Guo Yan-zi, Li Guo-liang, Zhang Fu-sheng. Research on an Engineering Simulation Model of Ocean Reverberation[J]. Ship Electronic Engineering, 2018, 38(10): 123-125.
Identification of Sweep Jammer Based on Energy-azimuth Feature for Acoustic Homing Torpedo
WANG DanYANG Xiang-fengZHAO WeiXIAO Lin
(1The 705 Research Institute, China State Shipbuilding Industry Corporation Limited, Xi’an 710077, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi’an 710077, China)
A sweep jammer is one of the main jammers that countermeasures underwater acoustic homing torpedoes during target identification. To improve the identification ability of the sweep jammer for acoustic homing torpedoes, the jamming mechanism of the sweep jammer in target detection is analyzed according to the particular sweep signal in its energy and azimuth feature parameters, which are
by the torpedo. Based on the analysis, a method combining the energy and azimuth features to identify the sweep jammer is proposed, and the energy and azimuth features are extracted through the digital processing of signals received by the torpedo, and jammer identification is performed based on the result of weighted fusion with these two feature parameters. This is an active detection method that overcomes the disadvantage of using a single parameter to identify and increases the reliability of jammer identification with the combined judgment of these two feature parameters. The effectiveness of this method is verified by establishing a model to simulate real signals received by an acoustic homing torpedo.
torpedo; sweep jammer;energy feature; azimuth feature; data fusion
TJ630.34; TB566; TN911.7
A
2096-3920(2021)06-0769-06
10.11993/j.issn.2096-3920.2021.06.018
王丹, 杨向锋, 赵伟, 等. 基于能量-方位特征的声自导鱼雷扫频干扰器识别方法[J]. 水下无人系统学报, 2021, 29 (6): 769-774.
2020-11-26;
2021-03-06.
王 丹(1989-), 硕士, 高工, 主要研究方向为水下声像处理.
(责任编辑: 杨力军)