基于改进RBF神经网络的采煤机截割煤岩性状智能识别
2022-01-12段铭钰袁瑞甫杨艺
段铭钰,袁瑞甫,杨艺
(1.华中科技大学 机械科学与工程学院,湖北 武汉 430070;2.河南大有能源股份有限公司,河南 三门峡 472300;3.河南理工大学 能源科学与工程学院,河南 焦作 454000;4.河南理工大学 电气工程与自动化学院,河南 焦作 454000)
0 引 言
采煤机智能截割是煤矿综采工作面智能化开采的关键技术之一[1]。在采煤机截割过程中,如何根据顶板与煤体分界面实时确定摇臂高度,如何根据煤岩情况实时确定牵引速度,这些都是采煤机智能截割的核心问题和技术瓶颈[2]。
自20世纪60年代以来,科研工作者针对煤岩分界问题展开了深入研究。目前,国内外的煤岩识别技术主要分为直接探测法和间接探测法[3]。其中,直接探测法又分为γ射线探测法[4]、红外探测法[5-6]、截齿应力探测法[7]等;间接探测法又分为图像检测法[8]、记忆截割法[9]、声学诊断法[3]等。γ射线探测法[10]、红外探测法、图像检测法[11-12]和声学诊断法[3]需要增加额外的检测设备,并通过检测到的信号综合判断煤岩分界面。
上述各方法在特定环境下能够取得较好的识别效果。张宁波等[13]在实验室中分别测量煤岩γ射线辐射量,完成了煤岩性状准确分辨;王超等[14]通过灰度共生矩阵(GLCM)提取煤岩图像特征参数,进行了煤岩性状识别;张强等[6]采用主动红外激励监测煤岩表面温度变化,实现了煤岩识别。然而,煤矿井下工作环境恶劣、地质条件复杂多变,检测设备必须满足煤矿井下安全性要求,并能适应工作面复杂环境。此外,工作面的干扰信号众多,截割过程中粉尘质量浓度大、水雾干扰摄像头拍摄等使γ射线、红外回波、光学图像、声音信号受到不同程度影响,从而导致目标信号难以准确识别,这也是工作面煤岩分界面难以可靠识别的主要原因。
记忆截割方法是通过人工示教方式确定采煤机截割下一刀煤时的摇臂动作,实质上规避了煤岩分界面识别技术。该方法对顶板地质条件稳定的工作面较为有效。
截齿应力探测法无需增加探测设备,通过检测采煤机截割煤层和岩层时的应力不同确定煤岩分界面。2010年,白学勇[15]研究了采煤机截齿冲击力力学特征,分析了安装不同约束对截齿等效应力、速度和加速度的影响;赵学雷[16]、周游等[17]通过分析采煤机载荷和截齿应力特征,提出了煤岩分界面的初步判断方法。2013年以来,许静[3]、曹 学 涛[18]、韩 飞[19]、刘 春 生 等[20]、王 丽等[21]深入分析了采煤机截齿、截距和载荷的工作特性。2018年以后,基于截割特性的煤岩分界面识别技术逐步成熟[3,10,22]。
基于采煤机截齿应力的煤岩分界面识别方法通常综合采煤机负载特征、震动信号、应力信号等多源信息[3,10,16],能较为准确地预测顶板位置,指导采煤机摇臂调整高度。受上述研究成果启发,为进一步推进工作面煤岩识别技术发展,本文以工作面现有信息源为基础,综合采煤机截割电流、牵引电流和摇臂调高液压缸阻力等数据,基于RBF(radial basis function)神经网络模型,利用改进的萤火虫算法对该模型进行优化,并使用优化后的RBF神经网络模型对当前截割的煤岩性状进行识别。
1 神经网络模型
人工神经网络是采用分布式存储和并行协同处理进行信息处理的数学模型。通过权重学习,使神经网络逼近输入与输出之间的映射关系。RBF神经网络逼近能力强、操作简单、响应快、可靠性好,被广泛应用于模式识别和预测控制等领域[23-24]。
1.1 基函数选取
图1为RBF神经网络结构。利用RBF函数作为其隐含层神经元的激活函数,对输入RBF函数的信息去线性化。隐含层的输出结果经过加权求和并由输出层输出。由于隐含层和输出层间的权值是线性的,这一特点在很大程度上加快了学习速度,同时也避免了网络过拟合。

图1 RBF神经网络结构Fig.1 Structure of RBF neural network
RBF函数定义:设X∈Rn,以X0为中心,X到X0距离为半径的径向对称函数R(x)=X-X0称为RBF函数。
选取RBF神经网络隐含层的激活函数时,一般采用高斯核函数

式中:xp=(xp1,xp2,…,xpn),为输入样本;ci为隐含层第i个节点的基函数中心;σ0为基函数的方差,即基函数的宽度;R(xp-ci)为隐含层第i个节点的输出。
RBF神经网络的输出为

式中:ωij为连接权值;i=1,2,…,h,h为隐含层的节点数;θj为第j个输出节点的阈值;yj为输出层第j个节点的实际输出值。
RBF神经网络的核心是径向基函数的确定[25-26]。通常情况下,径向基函数选用式(1)的高斯核函数,而确定高斯核函数中心和宽度的参数直接决定了RBF神经网络对输入和输出信号映射关系的逼近能力。对于非线性较强、变量耦合较多的系统,高斯核函数参数选取不当将直接导致逼近失败。为此,本文提出一种基于改进萤火虫算法的高斯核函数确定方法。
1.2 改进萤火虫算法
人工萤火虫算法(firefly algorithm,FA)是一种模拟萤火虫群体行为的群智能优化算法[27],它通过个体之间的相互吸引在搜索域内寻优,参数少、结构简单。在寻优过程中,萤火虫个体自动聚集成多个子群,分别在不同位置进行深度寻优,因此常被用于解决具有多峰的非线性优化问题[28-29],并能很好地解决RBF神经网络径向基函数参数的优化选取问题。
在萤火虫聚集过程中,个体随着亮度发生移动,聚集结果将锁定在最优解的邻域内,因此常出现最优解精度较低的问题。此外,在迭代末期,由于萤火虫亮度变化较小,收敛速度将变慢,甚至难以得到全局最优解。
为了解决萤火虫算法中个体难以脱离局部最优、导致算法早熟的问题,本文将萤火虫算法进行改进,采用2个策略提升萤火虫算法的全局最优求解能力。
(1)采用分布区域收敛的步长策略代替原算法的固定分布步长策略。改进后的步长分布范围随更新次数的增加而减小,具体实现为

(2)增加基于随机游走的局部探索策略,使当前最优的萤火虫在其附近范围内进行随机搜索。若该位置的萤火虫获得更优位置,则将其位置替换为新的位置,否则保持位置不动,从而增加算法对潜在最优解的探索能力,具体实现为

改进的萤火虫算法流程如图2所示。
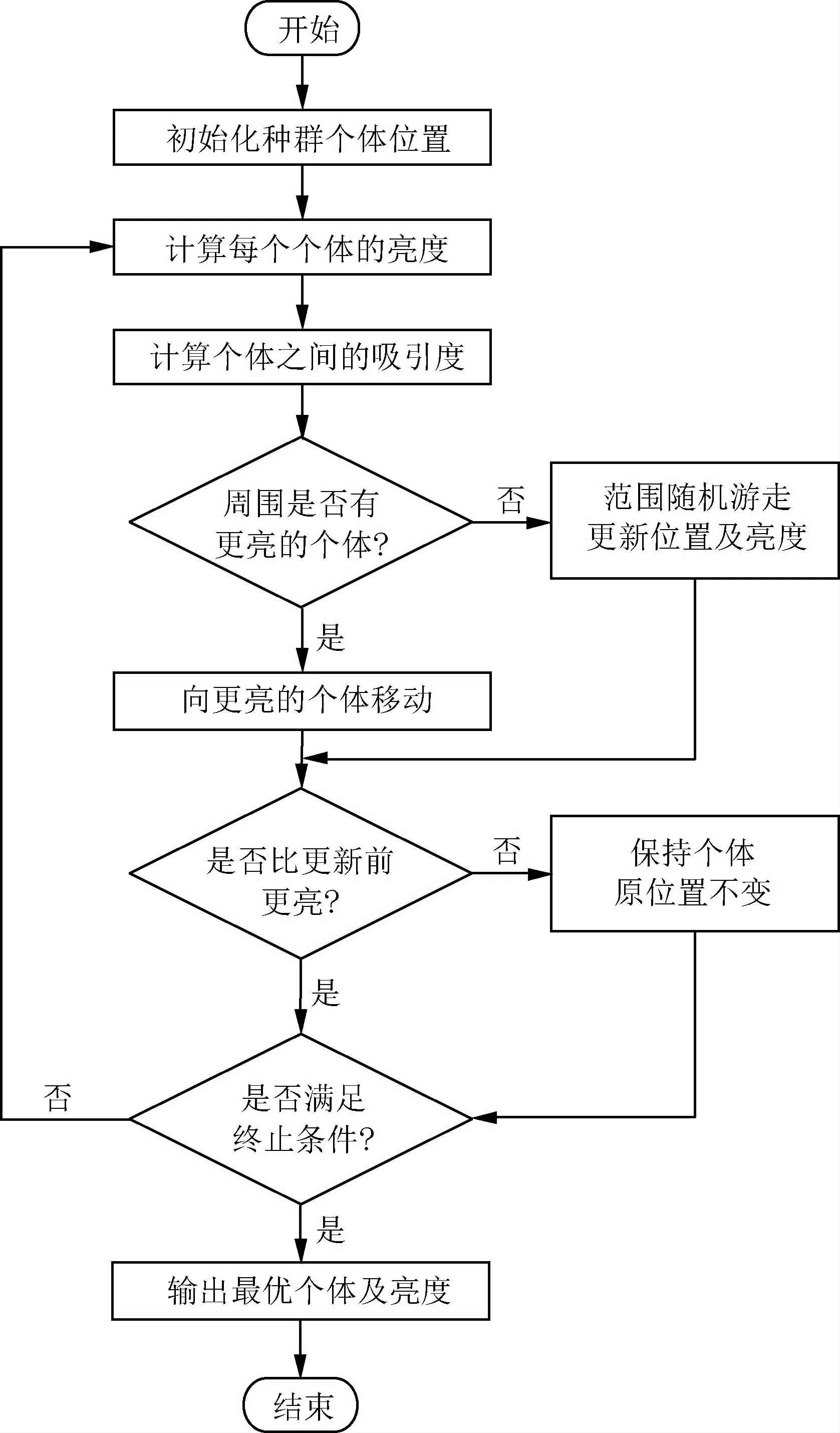
图2 改进的萤火虫算法流程Fig.2 Flow chart of improved FA
1.3 基于改进萤火虫算法的RBF神经网络
确定径向基函数是RBF神经网络的难点,本文利用改进的萤火虫算法对RBF神经网络的基函数宽度进行优化求解。将神经网络的期望输出和实际输出的均方差作为适应度函数,通过萤火虫快速聚集,确定径向基函数的参数,使RBF神经网络达到理论最优。
基于改进萤火虫算法(IFA)的RBF神经网络(radial basis function neural network,RBFNN)算法流程如图3所示,具体实现步骤如下。
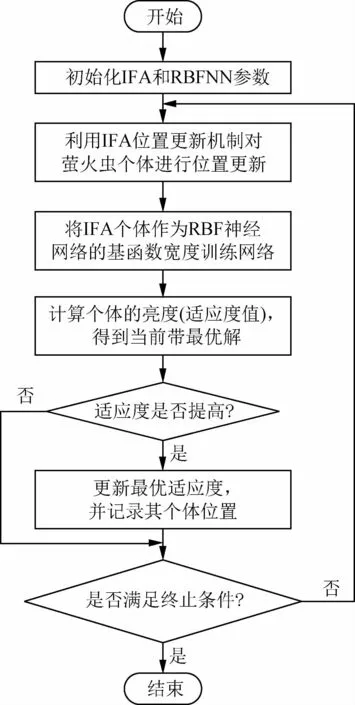
图3 基于改进萤火虫算法的RBF神经网络算法流程Fig.3 Flow chart of RFB neural network based on improved firefly algorithm
步骤1初始化IFA算法参数和RBF神经网络参数。
步骤2根据IFA算法位置更新机制更新个体位置,将个体当前所处位置作为RBF神经网络的基函数宽度,输入训练样本进行网络训练。
步骤3将RBF神经网络的期望输出与实际输出的均方误差作为适应度函数。
步骤4选择最优的适应度函数结果及其对应的个体位置,更新最优位置,并更新最优适应度值。
步骤5重复步骤2~4,直至满足设定精度或达到最大迭代次数,输出最优结果。
2 结果与分析
2.1 改进萤火虫算法性能测试
为验证改进萤火虫算法的有效性,对改进策略进行性能测试,并选用常用的5个标准测试函数以确保测试的合理性,测试函数如表1所示。同时选取3种典型算法:粒子群算法(particle swarm optimization,PSO)[30];果蝇优化算法(fruit fly optimization algorithm,FOA)[31];蝙蝠算法(bat algorithm,BA)[32]。采用3种经典的优化求解算法作为对比算法,在精度和运行时间方面进行对比测试。测试环境:CPU为AMD Ryzen 53500u 2.10 GHz;内存16 GB;512 GB三星固态硬盘;测试软件为MATLAB2017b。
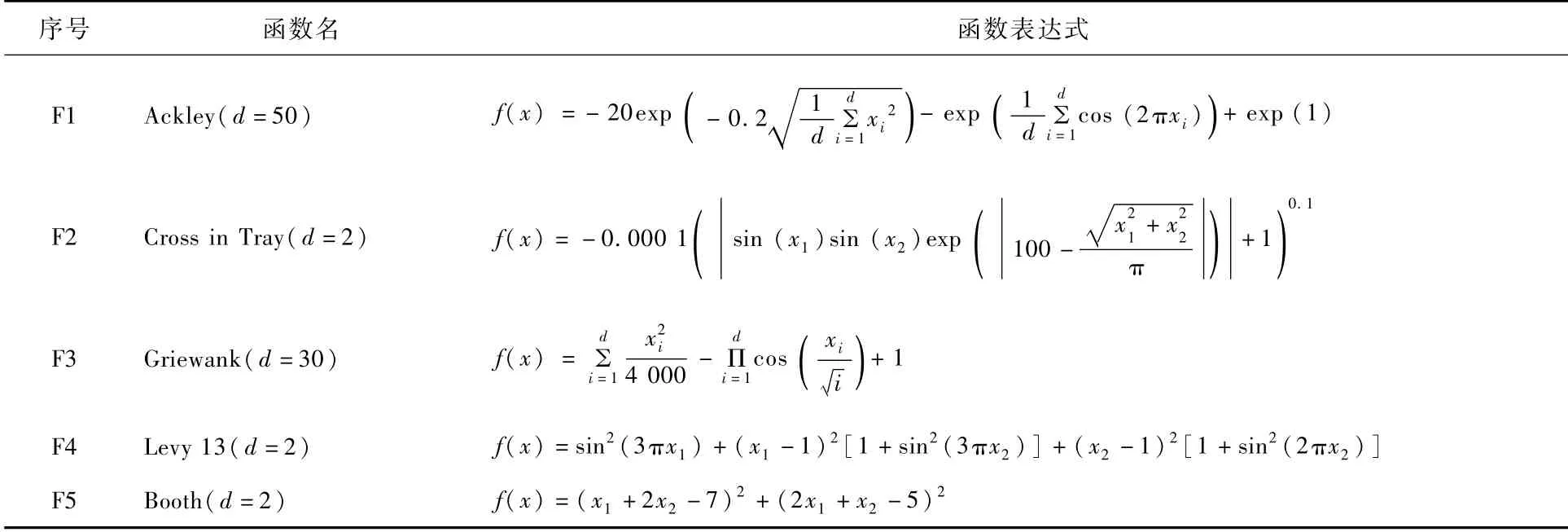
表1 测试函数Tab.1 Test functions
为确保测试的公平性,统一根据文献[33]设置IFA和FA算法的初始参数:吸收系数γ=1,初始步长α=0.5,初始吸引度β0=1。所有算法的种群规模为20,最大迭代次数为200次,分别对每种算法进行50次测试,记录所得的最优值和算法运行时间,并对运行时间求平均值。不同算法迭代曲线如图4所示,仿真测试数据如表2~3所示。
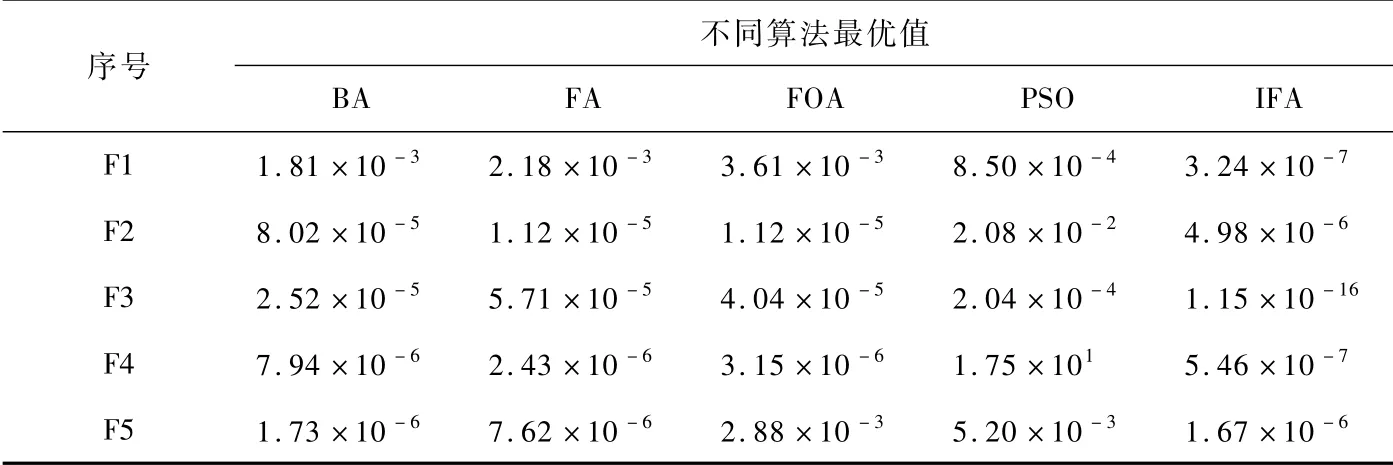
表2 不同算法最优值对比Tab.2 Comparisons of optimal values of different algorithms

图4 不同算法迭代曲线Fig.4 Iterative curves of different algorithms
由表2可以看出,IFA在收敛精度上较其他算法更加优异,说明本文所提出的IFA算法相对于其他算法在解决最优化问题上具有更强的优势。这是由于本文所提出的算法在迭代初期具有较大的搜索范围,避免了算法早熟,而在后期拥有较小的步长,使算法具备更优秀的局部搜索能力。同时,本文算法通过添加局部精细搜索,进一步增加了算法跳出局部最优的能力。由表3可知,本文算法在时间消耗上基本近似于标准萤火虫算法,平均耗时位居第三,说明本文提出的IFA算法在耗时上具有一定的竞争力。
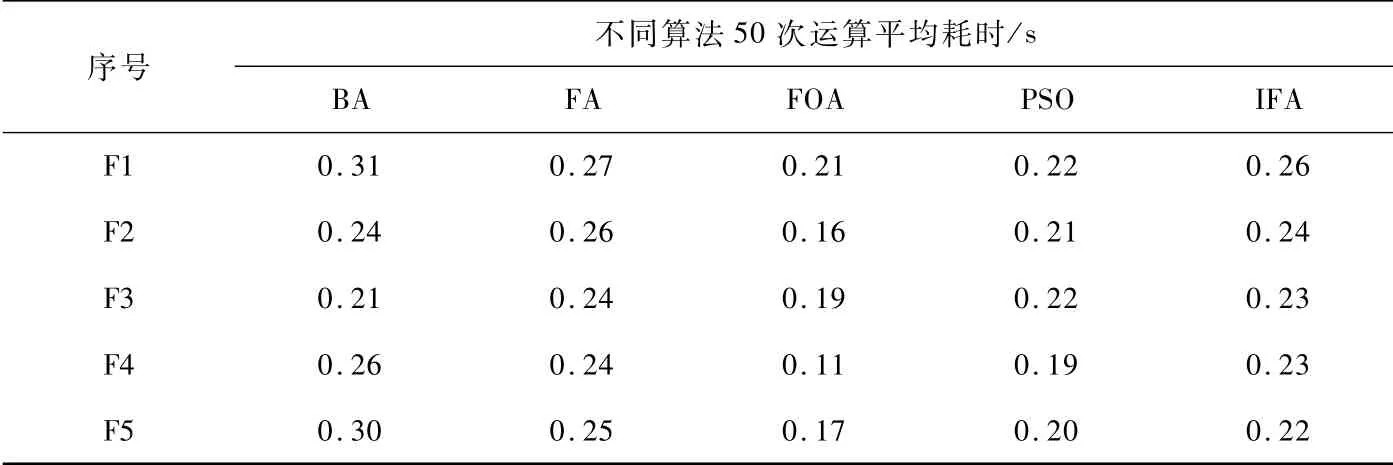
表3 不同算法平均耗时对比Tab.3 Comparisons of average time consumptions
综上,IFA算法在运算精度和运算速度方面均取得了较好的结果,说明用本文提出的算法解决最优化问题具有一定的应用潜力。
2.2 基于改进RBF神经网络的煤岩性状识别
2.2.1 煤岩性状识别模型化分析
在采煤机截割煤岩过程中,其截割电流、截割转速、牵引速度和摇臂调高液压缸阻力都会受到煤岩性状的影响[34]。
将截割电流、截割转速等因素看作煤岩性状识别的特征空间,设为X,X={x1,x2,…,xn},n ∈R为特征空间的维度。分类结果可构成分类空间,设为Y,Y={y1,y2,…,ym},m∈R为分类空间的维度。建立从特征空间X到分类空间Y的映射关系,即

将截割电流、牵引电流和摇臂调高液压缸阻力作为采煤机截割系统的标准输出量,便于实时获取和分析。因此,本文选用的特征空间维度为3,采用x1,x2,x3分别表示截割电流、牵引电流和摇臂调高液压缸阻力。
此外,根据煤层地质条件,设置输出空间维度为5,煤岩性状分类标号如表4所示。

表4 煤岩性状分类标号Tab.4 Definitions of coal and rock properties
随着采煤机截割工作的推进,若煤岩硬度增加,则截割电流、牵引电流、摇臂调高液压缸阻力增加,反之则减少,故根据以上3个变量反映煤岩硬度的变化情况。而截割电流、牵引电流、摇臂调高液压缸阻力和煤岩硬度的对应关系为典型的黑箱问题,可以通过输入输出特点了解该系统规律,而不涉及系统内部的结构和相互关系。
因此,本文通过建立截割电流、牵引电流、摇臂调高液压缸阻力和煤岩性状的关系,采用改进的RBF神经网络模型对采煤机当前截割煤岩的性状进行估计。
2.2.2 RBF神经网络的萤火虫优化模型
由于煤岩性状估计模型采用截割电流、牵引电流、摇臂调高液压缸阻力3个信息源作为输入,故输入层节点数为3。输出层由实际的煤岩性状分级确定,试验中设置5种煤岩性状分级,故输出层节点为5,隐含层节点数由MATLAB中newrb函数自动生成。煤岩性状识别的RBF神经网络模型如图5所示。
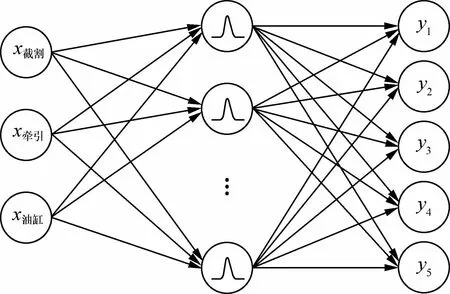
图5 煤岩性状识别的RBF神经网络模型Fig.5 RBF neural network model for recognition of coal and rock properties
根据建立的RBF神经网络模型,隐含层选用如式(1)所示的径向基函数,其中需要优化的参数空间设为σ={σ1,σ2,σ3},利用萤火虫算法对其进行迭代,得出合适的σ值。
萤火虫算法的适应度函数为RBF神经网络的输出y与样本y~的均方差,定义为

改进萤火虫算法的目的是求σ对应度函数g(σ)的最优值,其中g(σ)为优化问题的目标函数,求解过程见1.2节。
3 试验验证与结果分析
本文以河南大有能源股份有限公司耿村煤矿综采12150工作面实测数据为基础,开展验证试验。综采12150工作面开切巷长250 m,煤层平均厚8.7 m,采用放顶煤开采,煤层属中硬煤层,1.5<f<3.0,硬度分布不均匀,夹矸较多,113~137号架间存在不均匀断层,适合作为本文所述煤岩性状识别试验对象。
该工作面配置MG400/930WD型电牵引采煤机,可在截割过程中实时监测并采集截割电流、牵引电流及摇臂调高液压缸阻力等数据,如图6所示。

图6 数据监测与采集Fig.6 Data monitoring and collecting
根据实际情况定义5种不同的煤岩性状分类,标号为y1~y5,并将其与煤岩性状对应构成数据对,如表4所示。由于条件限制,共采集数据对500个,进行100次仿真,每次抽取450个数据对对作为训练样本,50个作为测试样本,进行煤岩性状识别,其中第10次和第87次仿真结果如图7所示。100次仿真中,正确识别点4 697个,错误识别点303个,总体识别准确率为93.94%。
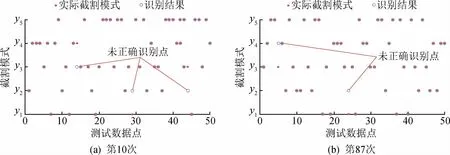
图7 煤岩性状识别仿真结果Fig.7 Simulation results of coal and rock properties recognition
4 结 语
在智能化采煤工作面中,采煤机准确识别当前所截割的煤岩性状是实现其智能控制的前提和关键。本文根据采煤机截割电流、牵引电流和摇臂调高液压缸阻力的变化,采用改进的萤火虫算法对RBF神经网络的基函数宽度进行优化,利用优化后的RBF神经网络模型对采煤机当前截割的煤岩性状进行识别,并对煤岩性状识别模型进行仿真。仿真结果显示,采用该模型对煤岩性状进行识别的准确率为93.94%,识别准确率较高,具有较好的工程应用潜力。
