基于视觉显著性模型的地域建筑肌理特征识别
2022-01-07梁楠
梁 楠
(安徽工程大学 建筑工程学院, 安徽 芜湖 241000)
随着经济的发展,建筑成为一个城市的代表,更是城市文化的空间载体[1]。从形态上看,古代建筑的肌理形态出现各种修补,而且在城市快速发展的过程中,古代建筑分布呈现高度碎片化现象[2],很多历史建筑渐渐消失,只有少部分被保存。因此,研究地域建筑肌理的内容和规律,展示地域建筑肌理的作用,对研究历史地域文化的发展前景有很大的帮助。曹艳玲等研究基于特征分布的特征识别方法[3],通过颜色特征识别,运用像素比值法对建筑肌理图像识别,但此方法在光照条件不好的情况下识别精度极低。刘亚冲等研究基于Softmax(Softmax regression)回归的特征识别方法[4],在提取建筑肌理图像特征时采用SITF(Scale-invariant Feature Transform)算法,运用GPS和SITF匹配特征相连接的方法识别建筑肌理图像,但是此算法需要考虑GPS的限制,图像识别的时间会比较长。
视觉注意机制是所有生物的一个重要特性,有助于人类在众多视觉信息中快速地搜索到有用显著物体,减少处理信息的计算量和时间。因此,选取建筑物图像为研究对象,研究基于视觉显著性的地域建筑肌理特征识别优化方法,提高识别效率[5-7]。
1 基于视觉显著性模型的地域建筑肌理特征识别
1.1 图像增强
1.1.1 直方图基础
直方图增强技术是一种通过更改原始图像直方图的方法对图像进行处理和变换,选择的直方图决定图像增强的程度[8]。图像增强前像素灰度级用变量α表示,增强后用变量β表示,Qα(α)和Qβ(β)各自表示与灰度级分布对应的概率密度。若像素灰度值在区间[0,1],α=0代表黑,α=1代表白。区间[0,1]里α值的函数表示为:
β=T(α)
(1)
T(α)符合两个要求:(1)0≤T(α)≤1;(2)单值单调添加函数。要求(1)确保调换后像素灰度值在给定的区域里,要求(2)让灰度级稳定在从黑至白的顺序。而β到α反变化是:
α=T-1(β),0≤β≤1
(2)
变量β也要符合上述要求,通过概率理论可知,如果已经给出变换函数β=T(α)和Qα(α),单值单调函数值是T-1(β),所以可得:
(3)
因此直方图增强技术在更改图像的外部特征时主要利用改变函数操纵图像灰度级的概率密度函数。
1.1.2 直方图均衡化
对于连续图像,变换函数是:
(4)
其中:α是积分变量;等号的右侧是累计分布函数,可以帮助图像实现灰度级分布均匀化。通过两边求导可得:
(5)
将式(5)代入式(3)可以得出:
(6)
由式(6)可知,经过变换后,变量β在定义域内,均匀概率密度是Qβ(β),相当于像素的动态区域增多。
关于离散图像,灰度级αk的概率值
(7)
式中:η是图像像素的总数,ηk是图像里灰度级的显示次数,L是灰度级的数量,Qα(αk)是第k级灰度级的概率。与(4)式对应的离散函数是:
(8)
其反向变换形式为:
αk=T-1(βk),0≤βk≤1
(9)
综上,可对所给的图像运用式(8)进行计算变换函数T(βk)。
对于直方图图像增强技术的算法,可通过3个步骤对原始图像直方图重新排列像素:(1) 进行k簇还原时采用k-means法(k均值聚类算法),递推求出簇,然后求得两个阈值;(2)通过数学形态法把分离的3个子图联系起来;(3)采用直方图均衡法得出子图的图像增强[9]。
1.2 特征目标的显著性提取
采用基于图论的显著性分析(Graph-based Visual Saliency,GBVS)算法提取地域建筑机理特征的视觉显著性[10]。GBVS算法通过马尔科夫链提取视觉显著性,马尔科夫链的性质是:
P(X(n+1)=x|X0,X1,X2,…,Xn)=P(Xn+1=x|Xn)
(10)
其中,x设为一个状态的过程,Xn是时间n的状态。
马尔科夫链被用于图论显著性提取,图片特征可以写成M:[n]2→R,定义M(i,j)和M(p,q)为特征向量,而两个向量值之间的区别用d((i,j)‖(p,q))来代表,得到:
(11)
因此,图像能够作为像素互相连接的有向图,由于图像的节点用像素点代表,而图中的两个邻近节点是M(i,j)和M(p,q)。设定M(i,j)至M(p,q)两个节点为权重ω1,可表示为:
ω1((i,j),(p,q))△d((i,j)‖(p,q))·F(i-p,j-p)
(12)
(13)
在式(13)中,σ是算法里的自由参数。因此,节点M(i,j)至M(p,q)的距离同节点M(i,j)至M(p,q)权重ω1与二者之间的差异性成正比。初始图像用每个节点的像素值表示,使用节点方式来表示每个节点像素,把全部的加权值和原始显著性值分别加在一起,统计出转移的概率,节点的原始显著性图用新得到的显著性值进行表示,把马尔科夫链里所有节点归一化处理[11]。获得的激发信息汇聚到很多个主要地方,创建一个图GN(包括n2个节点),设定图中临近的两个节点为新的权重ω2,可表示为:
ω2((i,j),(p,q))ΔA(p,q).F(i-p,j-p)
(14)
其中,A(p,q)是原始显著图。
马尔科夫链的节点与状态相对应,具有局限特性;马尔科夫链也会被较高激发节点约束,最终能够获得的显著图,将A(p,q)更深一步地归一化处理。
1.3 图像分割
图像会有一些阻扰特征目标的属性,且内容复杂,而GBVS算法只能得到待识别目标的图像范围,无法得到精确的识别目标。如果想要迅速且精准地识别目标,需要采取图像分割方法把目标部分分割处理。本文采用阈值分割方法来实现图像分割[12]。阈值分割方法通常解决的是灰度图像,经过收集和整理灰度图像的像素值得到灰度阈值,然后对比所有的像素值和阈值,依据对比要求,把符合条件的像素值归到对应的类型[13]。
在图像I(x,y)里,u是全部像素点的平均灰度,g是两种像素的类间方差,H是分割阈值,N1是大于阈值H的像素数个数,N0是小于H的像素数个数,w0是目标像素在所有像素数中的比例,u0是平均灰度,w1是背景像素在所有像素数中比例,u1是平均灰度,S*N是分辨率。计算公式如下:
w0=N0/(S×N)
(15)
w1=N1/(S×N)
(16)
N0+N1=(S×N)
(17)
w0+w1=1
(18)
u=w0×u0+w1×u1
(19)
g=w0×(u0-u)2+w1×(u1-u)2
(20)
结合式(19)、式(20)可知:
g=w0×w1×(u0-u1)2
(21)
经过上述方法,得到最大类间方差阈值,得到的阈值进行阈值化,即可得到分割结果。
本文应用阈值分割的最大类间差法分割视觉显著性图像,方法简单,速率高,算法容易完成。
1.4 基于BoVW模型的视觉显著性目标识别
最近几年,关于局部特征的图像代表方法有了飞快的发展,关于视觉模型显著性识别方法中,视觉单词(bag of visual words,BoVW)模型得到了很大的关注。起初,通过特征描述算子的方法对图像准备检测的特征点或区域进行提取,选取支持向量机(Support Vector Machines,SVM)对提取的地域建筑机理特征算子实施提炼,得到的视觉单词用特征概率表示,构成视觉词典,实现地域建筑机理特征识别。
1.4.1 BoVW模型
本文选取地域建筑机理的特征描述算子(Speeded Up Robust Features,SURF)。因为地域建筑机理的SURF特征维数很高,如果提炼的图像样本较多时,形成的特征向量会有成千上万种,所以要采取恰当的处理办法将特征向量实施降维[14]。采用k-means聚类算法,主要根据类内办法和最小的原则把向量里的n个特征点归为特定的k类,详细步骤如下:
(2)计算样本集Xi的样本点和聚类中心cj的距离,公式如下:
(22)
(3)计算k个聚类中心
(23)
重复步骤(2)和(3)至最大迭代次数。
视觉显著性模型包含有很多的视觉特征,由于k-means聚类迭代完善对迅速收敛有帮助,采取多次迭代完善的方法来处理。
1.4.2 支持向量机(SVM)模型
支持向量机(SVM)模型是核函数区域里单链型分类器,用于解决非线性分类问题,而且包括广泛和最完善性能,是一个汇总模式识别办法[15]。
SVM是一个交叉学习模型,用作分析数据的分类与回归。采用SVM分类方法,依据线性函数是否将样本分开的原理,判别样本能否线性可分。已知线性数据集{(x1,y1),(x2,y2),…,(xn,yn)},因此,判断线性函数在D维空间里的一般方程式为:
yn(x)=ωxn+b
(24)
其中:xn是度量样本中的特征向量,yn是特征种类。经过函数可以把yn映照在某个高维的领域中,依据判别函数寻找最完美的超平面来分类,实现最终地域建筑机理特征识别。
2 实验结果分析
以某地域建筑机理图像数据库为研究对象,从中随机选取图像,采用本文研究方法进行地域建筑肌理特征识别,并从图像增强、分割以及特征识别3个角度验证本文方法的优势。
2.1 图像增强实验
随机选取一幅历史建筑物的肌理图像,其原始图像和原始图像直方图如1所示。采用本文方法对原始图像进行灰度级为30级的均衡化处理,图像增强后的均衡化图像及其直方图的亮度变化情况如图2所示。
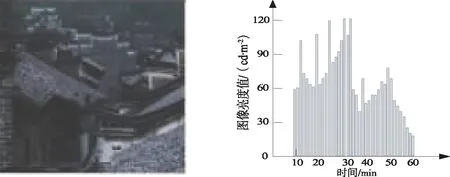
(a)原始图像 (b)原始图像的直方图
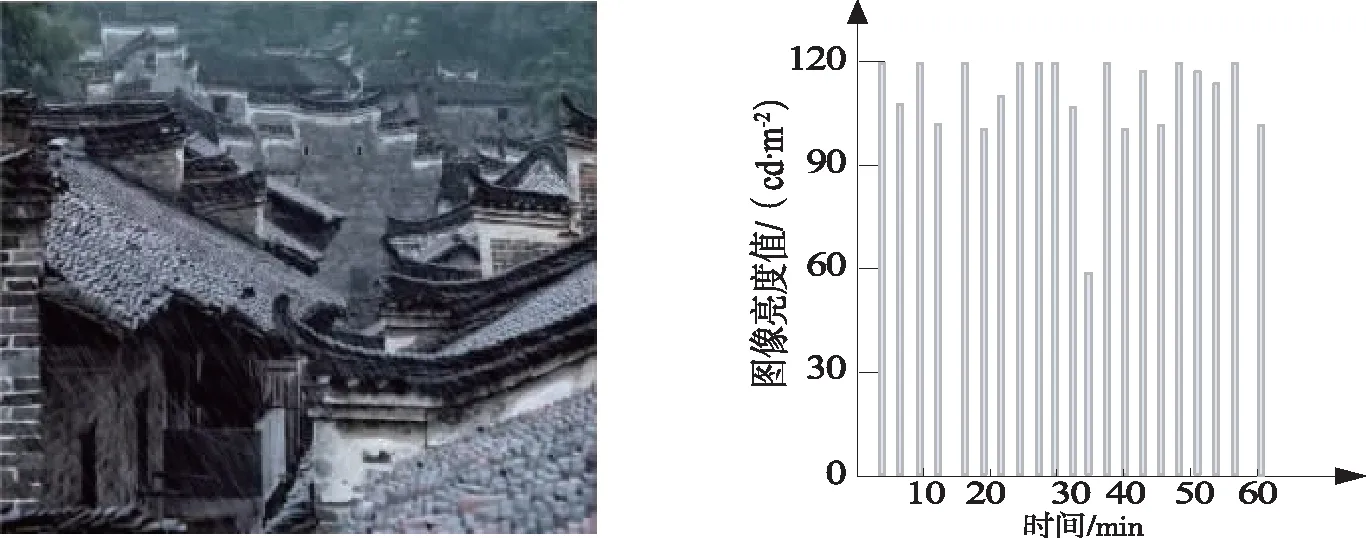
(a)原始图像均衡化 (b)均衡化的直方图
从实验结果可以看出:经过均衡化处理的图像亮度值基本稳定,灰度的动态和对比度差都有了很大的增强,图片变得清楚;未经过处理的原始图像和直方图图像亮度较暗,视觉效果差而且动态范围小。实验结果表明,本文方法图像增强处理后可显著增强图像亮度,提升图像视觉效果。
2.2 图像分割实验
随机选取数据库中一幅建筑肌理图像,其原始图像如图3(a)所示。进行分割实验,选取文献[3]提出的基于特征分布的建筑图像识别方法和文献[4]提出的基于Softmax回归的特征分类识别方法为对比方法,统计3种方法的图像分割效果。本文方法与文献[3]和文献[4]方法的分割实验结果如图3(b)、图3(c)和图3(d)所示,图中建筑物部分用白色像素,背景部分域用黑色表示。

(a)原始图片 (b)本文方法
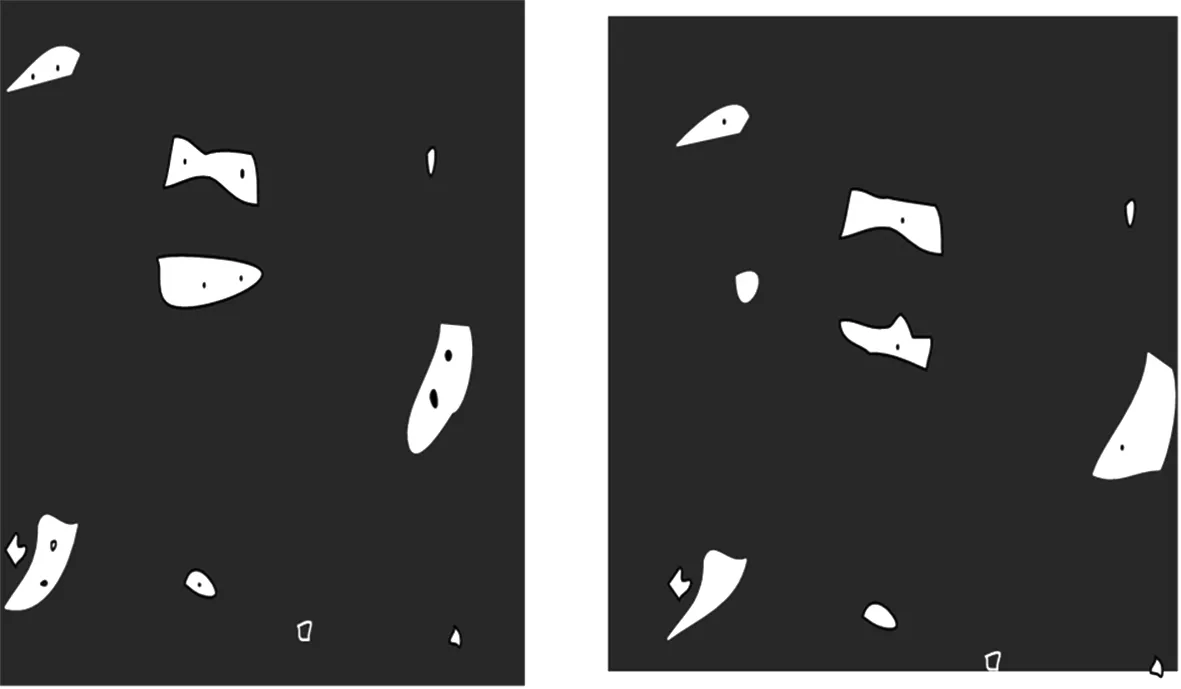
(c)文献[3]方法 (d)文献[4]方法
从以上分割结果可以看出:本文方法分割结果明显好于文献[3]和文献[4]的分割结果,文献[3]和文献[4]方法分割后的建筑物边界有裂纹和缝隙,有很多的分割斑点;而采用本文方法得到建筑物边界轮廓清楚,没有空洞存在,仅有特别少的分割斑点,视觉显著性效果非常好。实验结果表明本文方法的图像分割效果更好。
根据上述初始分割结果,统计应用本文方法后建筑物和背景部分像素数目应用迭代求解时的变化曲线图,结果如图4和图5所示。
从图4可以看出:本文方法作用下建筑物像素数目迭代次数为4时开始稳定;而文献[3]方法在迭代次数为6时趋于稳定;文献[4]方法在迭代次数为6时基本稳定。实验结果表明,本文方法的收敛要好于其他两种。
从图5分析可知:背景部分应用本文方法在迭代次数为4时原始分割像素数目趋于稳定,文献[3]方法和文献[4]方法在均在迭代次数为7左右时原始分割像素数目趋于稳定:同时,本文方法的迭代次数最少,而文献[4]方法的迭代次数最多,因此本文方法分割效果最好。
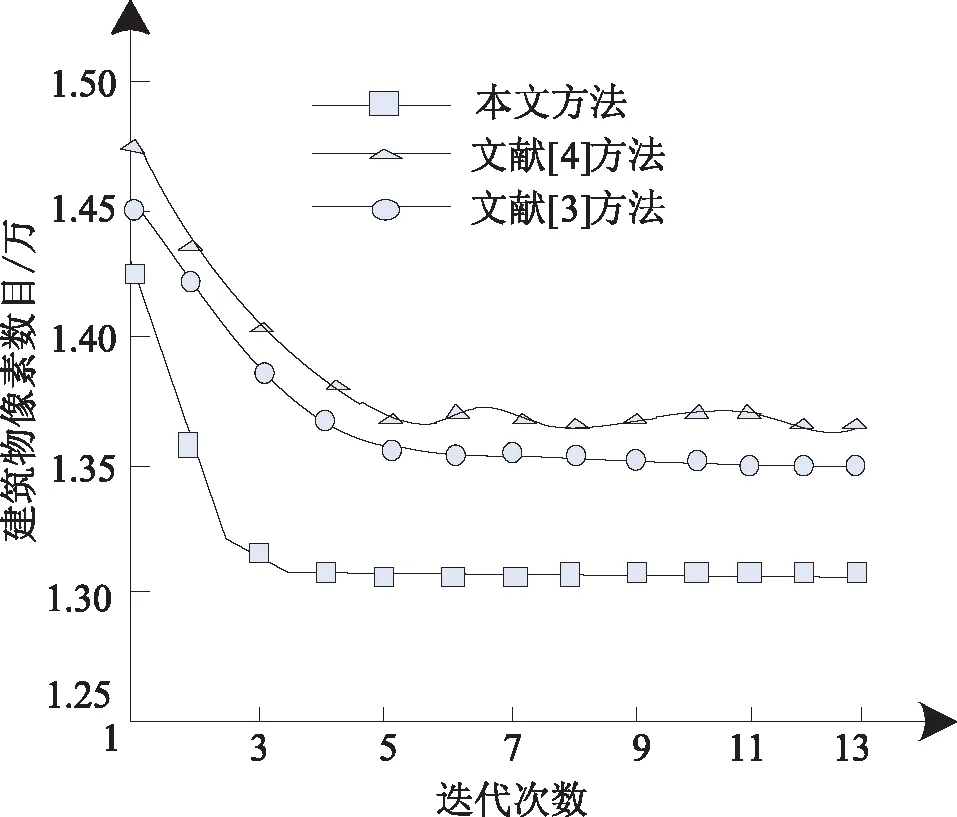
图4 建筑物部分
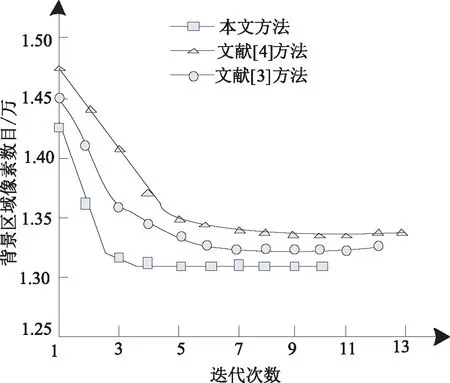
图5 背景部分
2.3 肌理特征识别实验
为了证明本文方法识别特征的真实性,现选择5种建筑场景背景图像来进一步比较,依次是楼房、堤坝、机场、铁轨、灯塔,统计3种方法对5种建筑物场景的建筑肌理特征识别效果,结果如表1所示。

表1 5种建筑物的特征识别对比
从表1能够清楚地看出,文献[3]、文献[4]方法的识别结果明显不如本文识别方法,表明本文方法的识别效果好。原因在于本文方法利用视觉显著性机制,有效凸显视觉场景中的感兴趣区域,使得地域建筑图像中的楼房、堤坝、机场、铁轨、灯塔等建筑物可以更好被识别出来。但图像局部视觉特征和单词一样存在不确定的含义,局部特征一样的含义也许会映射出不同的视觉单词,局部特征不一样的含义也许会被相同的视觉单词来表示,所以在识别的阶段还是存在些许误差,但识别效果依旧优于两种对比方法。为了继续验证本文方法具有更好的识别效果,从建筑物肌理图像中,选取50幅图像,进行25轮实验,统计3种方法特征种类的识别数目。将3种方法在每轮特征种类识别的结果进行比较,如图6所示。
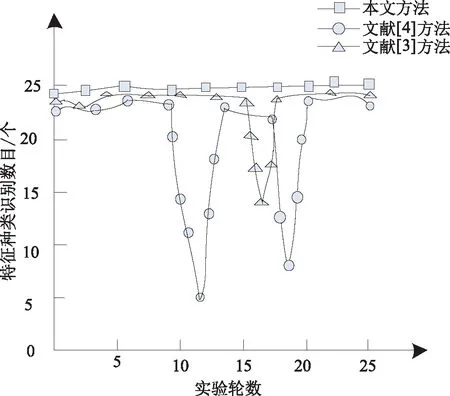
图6 特征种类成功识别数
由图6可知,本文方法的特征种类识别最稳定,特征种类识别数目较多,识别效果最好。而文献[3]方法在16轮时出现了错误识别,文献[4]方法分别在11轮和19轮时出现了错误识别。文献[3]和文献[4]方法在识别过程具有不稳定性,本文方法在特征识别时具有优势。
3 结 语
基于视觉显著性模型的地域建筑肌理特征识别方法,把视觉显著性模型用于地域建筑肌理特征识别,获得非常理想的分类识别成果。为了进一步提高目标特征的识别,利用SUV分类器是否线性可分的特性,提出交叉学习模型,通过对选取的建筑物图像进行识别率比较实验,验证了本文提出的识别方法在地域建筑肌理特征识别时更方便,识别性能也得到了很大的提高。
