大型火电机组次同步谐振/振荡保护控制方法分析
2022-01-07刘月正
刘月正
(陕西德源府谷能源有限公司,陕西 府谷 719400)
0 引言
我国能源分布和消耗的地域不平衡性,使得依托煤炭基地建设大型电站,并采用串联电容补偿装置(简称串补)或高压直流技术实现远距离输电技术,已成为我国电力工业发展的突出特点,而大型汽轮发电机组与串补交流/高压直流电网相互作用会引发次同步谐振或次同步振荡(统称“次同步谐振/振荡”)。其危害极大,轻则导致机组寿命损失,重则造成机组轴系损毁、系统稳定性破坏。
为了解决汽轮发电机组送出系统的次同步谐振/振荡问题,一般在火电厂侧建立两道防控措施:抑制防线和保护防线。抑制防线通过加装附加励磁阻尼控制装置或机端次同步阻尼控制装置来实现对次同步谐振/振荡的抑制,保证机组顺利并网发电;保护防线作为机组发生次同步谐振/振荡的最后一道防线,通过切除机组来保护机组轴系安全[1-2]。随着新型电力系统的建设发展,新能源机组大规模并网发电,火电机组作为保障系统安全运行的作用日显突出,因此需要深入研究火电机组在发生次同步振荡时的保护切机策略。对于电厂来说,机组轴系参数比较接近,在发生振荡时表现出来的振荡特征相似,会存在扭振保护同时切除多台机组(以下简称过切)的问题。为了解决这个问题,新疆某电厂通过采用多台同型机组定值的差异化设计,在一定程度上降低过切概率,但在一些疲劳累积特别快的环境下不能完全避免机组过切问题;内蒙古某电厂通过判断机组收敛或发散的趋势,来决定电厂扭振保护在动作后是否还需要继续切除剩余机组,这种方法主要通过延时进行处理,不可避免地造成后续机组一次扰动过程疲劳损伤过大。本文结合串补线路发生谐振时机组扭振的特点,对原技术手段进行优化,设计一种基于次同步谐振/振荡风险工况信息并结合机组扭振发展趋势来实现优化切机的方法,并通过仿真分析,证明该方法实施的可行性与有效性。
1 火电机组次同步谐振/振荡及保护原理
1.1 机网谐振原理
在安装串补的输电系统中,串补的电容器容抗与系统的感抗串联,构成一个串联谐振回路,其自振频率fe为:

式中:f为系统额定频率,XC、XL和X分别为额定频率下串联电容器的容抗、线路的感抗和发电机、变压器及负荷的等值感抗。一般线路的补偿度XC/XL<1,则有fe<f,所以可能出现的谐振是次谐波谐振,其频率小于系统额定频率。因此可以看出,发电机组和串补之间的谐振特性可以用两个关键参数进行描述:一是电网侧不同运行方式下的fe,表征网侧和机组侧之间发生谐振的耦合紧密程度;一是在此谐振频率下的系统阻尼D,表征在不同谐振频率下受扰动后的变化趋势,即系统的稳定性,D>0表示系统稳定,D<0则表示系统不稳定[3-4]。
假设电网正常运行,线路和设备未发生故障,即公式(1)中XC、XL不发生变化,那么机组侧的机组运行方式对系统谐振频率fe有较大影响,因此对机组保护控制策略进行优化,必须首先考虑机组解列后对次同步谐振/振荡问题的影响,即扭振保护不是单纯的设备保护,而是为系统贡献稳定性的系统保护。
系统阻尼一般由两部分组成:

式中:Dm为发电机组本身的机械阻尼,与发电机组本身的出力水平密切相关,机组出力越大,Dm越大,Dm一般都大于0;De为机组的电气阻尼,与机组电气功率及系统的方式相关,在常规交流系统中De大于0,而在串补的送出系统中,在一些方式下De小于0,从而有谐振的风险。从阻尼系数分析可以看出,在一些运行方式下,扭振保护切除机组并不是最佳选择,相反,在系统稳定方式下保留机组可能更好[5-6]。
1.2 扭振保护的基本原理
扭振保护功能主要通过两个核心判据实现:基于可变观测窗的模态稳定性判据为快速判据,通过连续检测扭振幅值趋势来实现;疲劳损失判据采用疲劳统计法(雨流法)和疲劳累积损伤理论(Miner理论)依据机组扭振响应动态及机组危险截面应力-寿命(S-N)曲线进行评定。
1.2.1 模态稳定性判据
模态稳定性判据通过实时测量发电机组轴系转速差提取各模态特征量,根据一段时间内的模态特征量相对变化趋势判别扭振模态是否发散或收敛,同时辅以机组的疲劳累积情况。对于快速发散的工况,稳定性判据可使保护快速动作,从而减少机组轴系疲劳累积。
1.2.2 疲劳损伤判据
疲劳反时限保护作为辅助保护功能,通过计算出的轴系各个危险截面的扭应力值,再依据机组的扭S-N曲线计算出轴系危险截面的疲劳损耗百分数,实时累计单次扰动下轴系各段的疲劳。疲劳寿命曲线表明了待评估位置扭矩(或扭转功率)和扭转周期次数的关系,类似于一条反时限曲线。当单次扰动下的疲劳实时累计达到疲劳定值或极限疲劳定值后,扭振保护动作[7]。
扭振保护的判据设计最主要的依据是扰动过程中机组的疲劳累积情况。将机组的扰动分为两个过程:一是扰动产生后300~400 ms内的暂态过程;二是暂态过程后10 s以上的衰减过程。暂态过程取决于扰动产生的扭振信号初始幅值;衰减过程取决于扰动产生后的发展趋势。如果不存在严重暂态扭矩放大问题的场合,衰减过程对扰动过程的疲劳累积影响最大。而机组的阻尼水平决定了衰减过程的发展趋势,机组解列后阻尼D≈0,其扭振信号的衰减非常缓慢,在30 s以上才能衰减到安全幅值以下,疲劳累积不容忽视[8-9],所以机组解列有时是保护被动的选择,而不是保护的首要选择。
同时,扭振保护按照机组进行配置,保护装置主要是通过采集机组的扭振信号,根据机组轴系的疲劳累积情况对机组进行最后的安全保护。如果电厂安装的多台机组是同型机组或参数接近,那么在一次扰动情况下各机组配置的扭振保护动作行为也接近,如果达到保护动作条件,则可能会在较短时间内切除多台机组,对电厂及电网影响都比较大,不利于系统的安全稳定运行[10-13]。
2 火电厂厂级扭振保护策略优化设计
2.1 策略优化的整体设计
全厂扭振保护的控制框架设计如图1所示。全厂扭振保护控制由按照机组配置的扭振保护常规功能及集中配置的厂级扭振保护决策控制功能组成,进行分级保护控制。
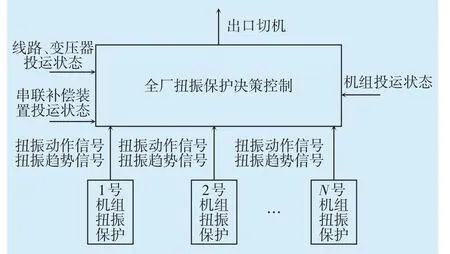
图1 火电机组全厂扭振保护控制框架
扭振保护是机组扭振的最后一道防线,在控制数据流上单向控制,分散于每台机组的扭振保护装置采集每台机组轴系的扭振信号,对扭振信号的趋势进行判断,同时上送至厂级扭振保护决策中心;厂级扭振保护决策中心收集各台机组的扭振动作信号及趋势信号,同时依据送出系统的实时状态和建立的次同步谐振/振荡方式库提供集中保护出口决策。
2.2 功能设计
2.2.1 扭振保护装置
扭振保护装置的保护功能按照常规扭振保护配置,设置稳定性发散判据和疲劳损伤判据,分别应对快速发散的谐振和长时间疲劳损伤问题[12]。扭振保护实时将动作行为状态和机组扭振发展趋势上送至厂级扭振保护决策中心。扭振发展趋势可通过扭振幅值的包络线斜率进行判断。
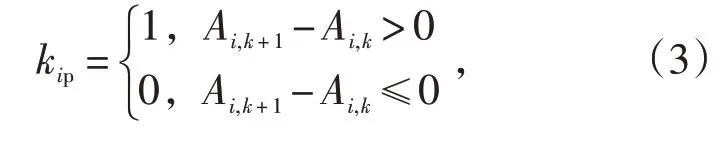
式中:kip为第i台机组发散标识,kip=1表示第i台机组扭振趋势呈现发散,kip=0表示第i台机组扭振趋势不发散;Ai,k+1表示第i台机组k+1时刻的扭振幅值;Ai,k表示第i台机组k时刻的扭振幅值。
第i台机组上送决策中心的信息集合Si为:

式中:Act_stabi表示失稳动作状态;Act_fragi表示疲劳动作状态;kip表示实时扭振趋势。
2.2.2 扭振保护决策中心
扭振保护决策中心对全厂机组扭振保护进行协调控制,在机组安全、系统安全及经济性方面努力实现最优化控制。一般来说,对于串补送出系统电网侧影响次同步谐振/振荡问题的主要条件为送出线路、主要变压器及串补的投退情况,而接入电网的系统等值对次同步谐振/振荡问题的影响较弱,暂不作重点考虑。因此在扭振决策中心建立送出系统的第i种运行方式下关键信息集合Ci为:

式中:l1,l2,…,lm1表示该运行方式下的运行线路;c1,c2,…,cm2表示该运行方式下的串补;T1,T2,…,Tm3表示该运行方式下的运行变压器等;S1,S2,…,Sm4表示该运行方式下扭振保护的上送信息集合;num表示送出系统运行机组数量。决策中心在运行过程中实时刷新系统的变化情况,跟踪网侧信息的变化。其逻辑过程如下:
(1)根据Si信息,判断机组扭振保护是否启动,如果有机组扭振保护启动,则进行下一步的判断;
(2)根据实时获取的关键信息集合Ci是否有系统线路、串补及变压器等设备退出或投入运行;
(3)如果关键信息集合Ci发生改变,重新获取此时网侧的谐振频率fe,fe可以通过离线仿真分析的方法提前获取;
(4)如果是第1台机组扭振保护发出切机命令,决策中心无延时接受命令直接跳机,进入下一步;
(5)重新获取切机后的谐振频率fe;
(6)如果是其他机组发出切机命令,对其切除后的谐振频率fe进行预判,如果fe更接近于机组轴系模态频率的互补频率,且各台机组的kip=0,则扭振决策中心不再跳机,保留机组。
(7)为了可靠,如果机组扭振幅值持续一定时间,则扭振决策中心再无延时跳机。
可见,通过扭振决策中心的控制,从理论上可以有效避免因电网大扰动引起多台机组同时跳机的问题。
3 仿真算例
以某省A电厂送出系统为例,基于PSCAD仿真环境对厂级扭振决策中心的实施效果进行验证。
3.1 送出系统接线图
A电厂共有4台同型号660 MW火电机组,经两回串补度分别为35%和30%的线路接入500 kV忻都变电站,忻都变电站通过3回35%串补度的线路和一回40%的串补线路接入石家庄北500 kV变电站。A电厂送出系统接线图见图2。
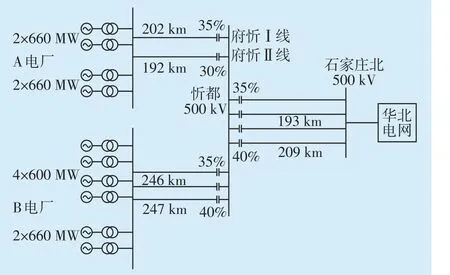
图2 A电厂送出系统接线图
3.2 仿真参数选取
以A电厂机组送出系统实际参数为例,采用多质块集中质量模型参数(见表1),机组的轴系固有频率见表2,机组发电机电气参数见表3。
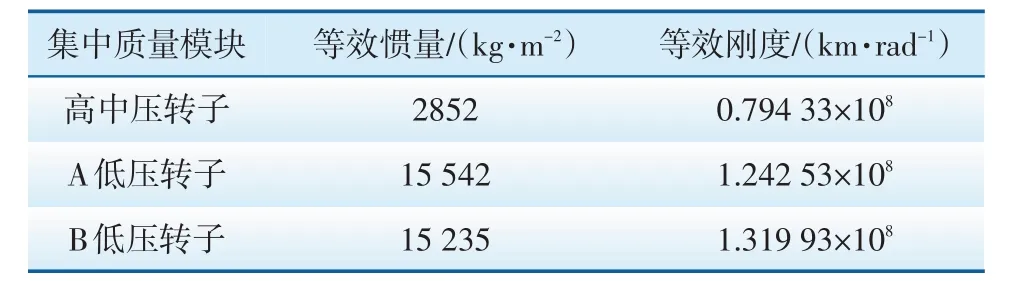
表1 机组集中质量模型参数

表2 机组轴系固有频率 Hz
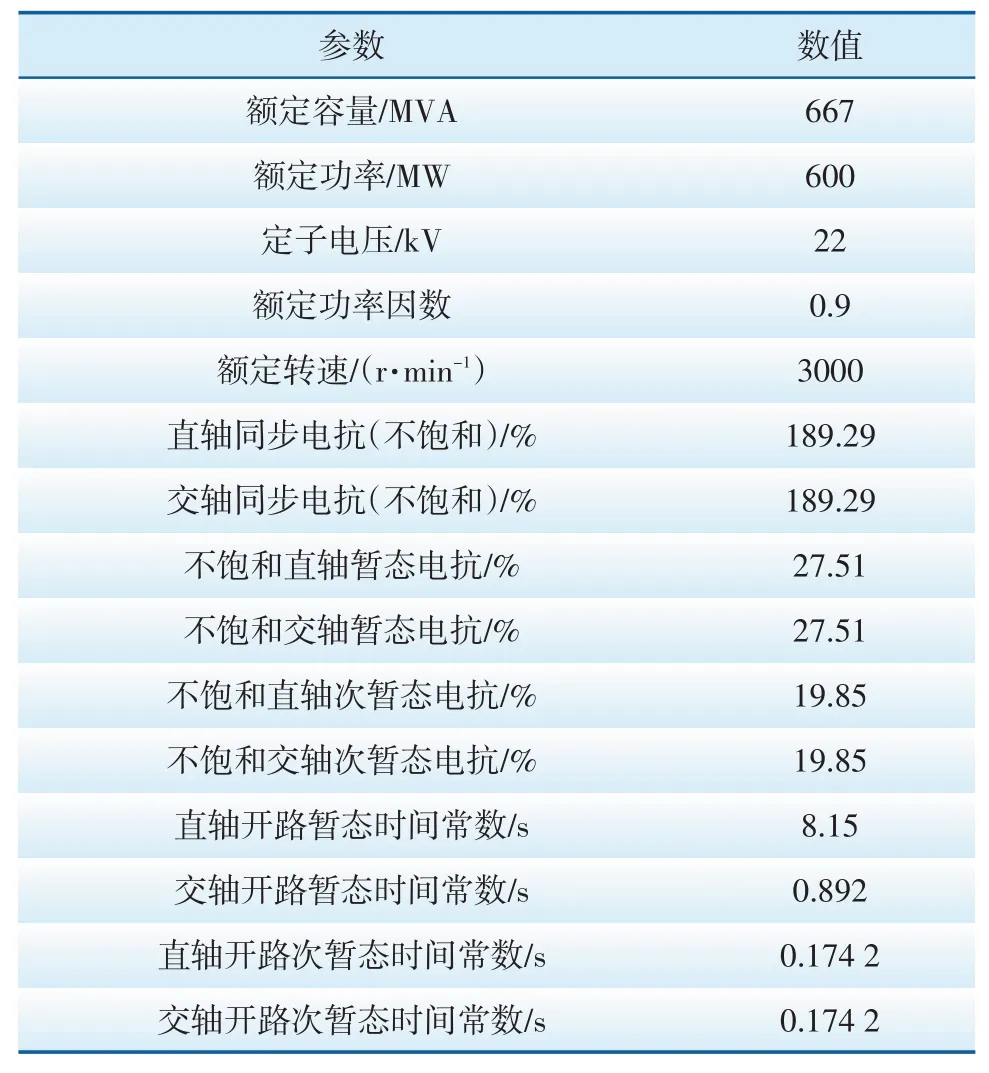
表3 机组发电机电气参数
3.3 仿真工况选择
挑选次同步问题最严重的一种方式进行验证,工况为:A电厂有4台机组运行,B电厂有6台机组运行,9条线路全部投入运行,9条线路安装的串补正常投入运行,串补过电压旁路定值按照实际定值整定2.3(p.u.)。故障类型设置:单相永久性故障,故障点在府忻Ⅱ线串补忻都侧。在1 s时刻发生短路故障,扭振保护疲劳保护动作定值为1%,发散保护动作判据中疲劳定值为0.6%。以1号、2号机组为例,故障后的扭振主导模态曲线及扭振保护动作信号如图3、图4所示。
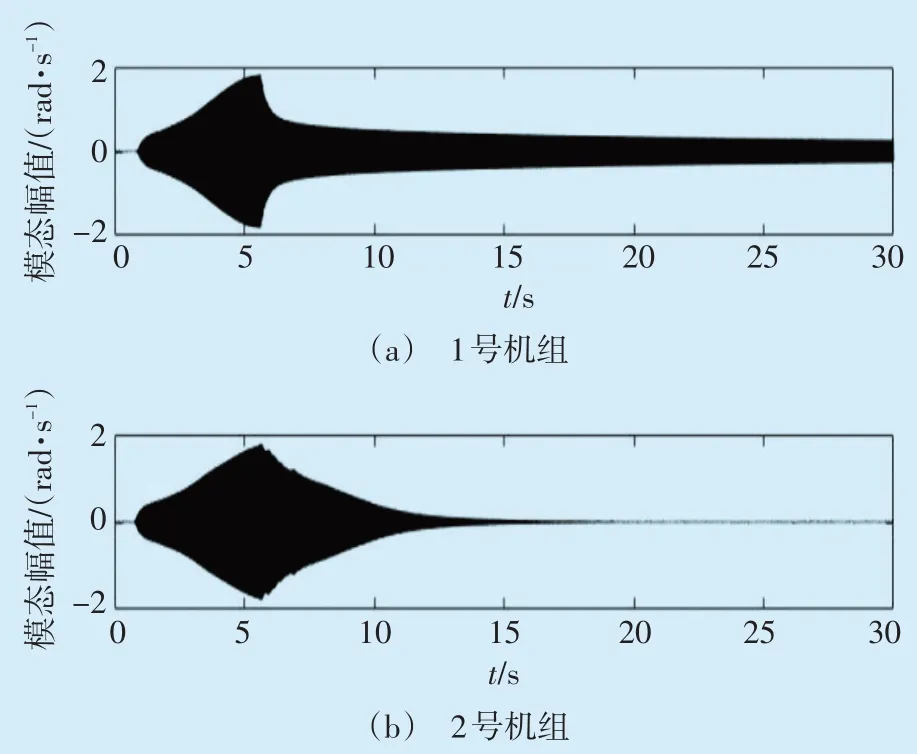
图3 故障后1号、2号机组扭振主导模态曲线
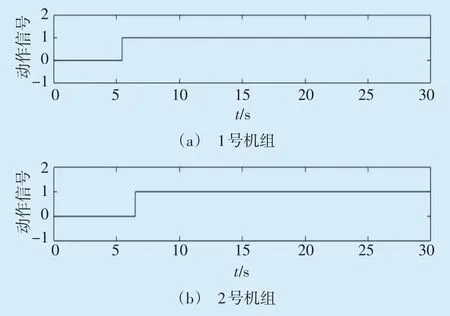
图4 故障后1号、2号机组扭振保护动作信号
不采取扭振保护集中控制,以1号、2号机组为例,在发生故障后,两台机组的主导振荡模式都呈现发散趋势,考虑到仿真环境下两台机组扭振信号的误差,1号机组先满足发散保护动作条件,保护动作,1号机组切除后2号机组扭振信号开始收敛。由于1号、2号机组是同型机组,扭振保护疲劳累积相差不大,2号机组在扭振信号未衰减到安全值以下时扭振保护滞后1号机组约500 ms动作,2号机组切除。如果采用扭振保护集中优化控制策略,1号机组和2号机组扭振保护将动作信号和趋势信号送至扭振保护决策中心后,决策中心先对1号机组执行切除操作,然后根据2号机组的扭振趋势和当前系统谐振频率变化判断,2号机组保护不满足再动作的条件,避免了2号机组被切除[14-17]。
4 结束语
火电机组次同步谐振/振荡在保护控制措施上按照机组配置的扭振保护装置(TSR)尚无法做到全厂最优化的控制。通过对全厂的扭振保护切机策略进行优化改进,可以有效避免过切机组的问题。通过对机组动作前后的状态做进一步的精准趋势评估研究,可实现厂级火电机组的有序安全保护控制。
