深远海磁力日变观测系统设计及应用
2022-01-06杜润林孙建伟陈晓红刘李伟李攀峰
杜润林, 孙建伟, 陈晓红, 刘李伟,, 李攀峰
(1.青岛海洋地质研究所 青岛 266071;2.中国石油大学(华东) 257061)
0 引言
在海洋磁力测量中,磁力日变影响是海洋磁力测量的最主要误差源。但在深远海区域进行磁力测量时,工区远离陆地,无法架设陆地磁力日变站,因此现阶段,国内已陆续有相关单位开始直接在测区或测区附近布放潜标式海底磁力日变站,并取得了一定成功经验[1-3]。在已有工作的基础上,对潜标式海底磁力日变站的设计和布放进行了改进,每套潜标系统至少布设两个磁力日变站,确保日变数据的完整性,并在关键部位进行加固,提高整套系统的安全性。通过在西太平洋海域对该套磁力日变潜标系统进行成功的布放回收,有效验证了该套观测系统的安全可靠性,且获取的日变数据分析对比发现能够满足规范要求。
1 潜标式磁力日变站系统设计
潜标日变站系统由铱星信标、打捞浮球(1个)、主浮球(24个)、sentinel磁力日变站(2台)、释放器(3台、其中两台并联)、重力锚、凯夫拉缆绳、锚链和卸扣等其他配件串联组成,潜标系统结构见图1。海水里,每个释放器重量为28 kg,磁力日变站为25 kg,凯夫拉绳(5 000 m)为5 kg,卸扣、旋转环等为8 kg。打捞浮球浮力为30 kg,每个主浮球浮力为25 kg,浮力远远大于重量,因此具备上浮条件,而且最下面释放器配有5个主浮球,释放后同样会露出水面。

图1 潜标日变站系统结构示意图Fig.1 Schematic diagram of system structure of submarine beacon day transformer station
安装Sentinel海底磁力日变站时,若设备两端直接连接潜标则上下接头持续受力,在拉力和水压作用下可能会造成壳体漏水;该套系统采用尼龙夹具将设备固定在缆绳上,并在设备两端用凯夫拉绳做保险绳,确保仪器持续安全工作[4]。同时潜标系统加长了锚系缆绳,使日变站尽量远离声学释放器和地锚等铁磁性物质,减少干扰。
为有效提升潜标的回收成功率,降低系统风险,该潜标底部配置了3台声学释放器, 其中2台释放器并联在距海底1 000 m处,另1台加装在其上端,视海水深度进行调节。释放器可实现对潜标的实时测距、定位和回收,回收仪器时,释放器通过顶部的声学换能器接收释放指令,释放器内的电机将转动并牵引系留构件打开,钢链从系留环中松脱,整个潜标系统在浮球的作用下浮到水面,任意1台声学释放器的成功释放均能确保潜标系统的顺利上浮。
为了防止重力锚和连接释放器处扭力过大,该系统在释放器下端加装旋转环,有效释放海水扰动时产生的扭力。
根据前期收集工区水深地形数据,设计潜标日变站长度,具体要求:由于海底磁力日变站站位水深对地磁有效信息的保留存在一定的相关性,随着水深增大,其保留的信息量逐渐减少,即海水层对地磁信息有着明显的衰减作用[5-8]。因此在大洋中,应尽量避免日变站沉放深度超过1 000 m,据此该潜标系统中磁力日变站分别布放至水下200 m和水下500 m处,有效减少海水层对地磁信息的过滤,并避免因日变站因沉放过浅导致其随海流波动[9]。
潜标布放时最佳速度为船舶对水1.5节~2节,兼顾安全及效率。因此当表层流速低于1.5节时,选择顶流布放;表层流速在1.5节~2节时,选择靶心位置原地布放;表层流速高于2节时,选择船尾对准靶心顺流布放[10-11]。
2 海底日变站位置选取
出于安全布放及顺利回收的考虑,结合收集的作业区水深地形数据、地磁场数据及潮流数据,选择地形平坦、潮流较小且地磁场变化较小的区域作为靶心点,并根据靶心点的水深初步设计潜标式海洋磁力日变观测系统。到达测区后,利用多波束测量靶心点附近地形,根据多波束测量结果,选择靶心附近地形平坦位置,对靶心点进行微调,使之位于平坦位置的中心[12]。根据调整后的靶心点处水深,对潜标式海洋磁力日变观测系统初步设计进行调整。
3 潜标日变站精确定位
潜标入水后,重块在海流的的影响下会发生漂移,在深海海域中漂移的距离随着深度增大,导致潜标在海中的实际位置与入水经纬度存在数百米的误差[13]。对于深海海域,潜标整体长度在1 000 m~6 000 m之间,在海流的影响下,潜标姿态往往有一定的倾斜,主浮球与重块的水平距离可以达到几百米甚至近千米。为了得到潜标在水中的实际位置,以便后续回收,有必要进行重新定位以降低回收风险。
以重力锚入水点为圆心,半径为2 000 m的圆上,均匀取三个定位点(呈等边三角形)A(X1,Y1)、B(X2,Y2)、C(X3,Y3)点。将船靠近定位点,调整船位使右舷朝向重力锚入水点,在右舷对释放器(D点)进行测距,每个点位测量三次后取平均值,依次得到三个定位点到释放器的距离分别Dis1、Dis2、Dis3,通过计算就可以得到D在平面ABC上投影点E的坐标(X,Y)及DE的距离(图2),首先根据勾股定理得到式(1)~式(3)。
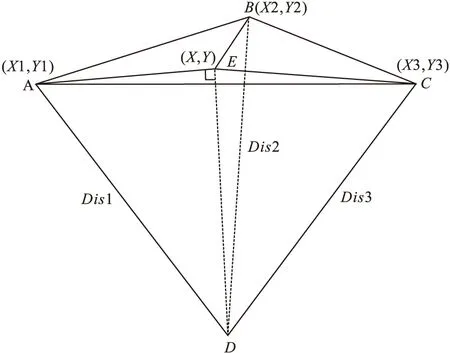
图2 三点定位示意图Fig.2 Three point positioning diagram
AE2+DE2=AD2
(1)
BE2+DE2=BD2
(2)
CE2+DE2=CD2
(3)
式(1)减式(2)得式(4),式(2)减式(3)得式(5),把坐标点带入,可以求得E点坐标(X,Y)的值,然后带入到式(8)求得DE,这样就得到潜标在水中的准确位置,提高了回收效率。
AE2-BE2=AD2-BD2
(4)
BE2-CE2=BD2-CD2
(5)
(X-X1)2+(Y-Y1)2-(X-X2)2-
(Y-Y2)2=Dis12-Dis22
(6)
(X-X2)2+(Y-Y2)2-(X-X3)2-
(Y-Y3)2=Dis22-Dis32
(7)
DE2=Dis12-(X-X1)2-(Y-Y1)2
(8)
潜标回收时应根据现场风流等参数,将船舶停靠潜标点下流处700 m~800 m处,并将船舷一侧对着回收点,将声学换能器垂直放入水面以下3 m处进行测距工作,当有稳定的测距信号时,对释放器发送释放指令,并实时检测水下释放器状态。在找到潜标之前,一直保持测距中,实时检测潜标距离的变化。
4 实际应用
通过在西太平洋某海域对潜标式磁力日变系统进行布放,首先根据前期收集资料设计潜标投放点位为图3中黑色圆点位置,此处周围地磁场较为平稳。到达地磁日变站设计点位后,利用多波束对设计点位附近地形进行扫测。根据实测地形结果对地磁日变站点位进行微调,选择相对平坦开阔的区域作为地磁日变站观测点,实际测量中此点位在设计点位偏南1.5 km位置(图3中红色圆点),距工作区最远约366 km,满足规范要求,在水深为200 m和500 m各布设一个日变站。 潜标释放完成后进行三点定位,得到日变站准确位置为图3红色五角星位置。

图3 潜标位置示意图Fig.3 Schematic diagram of submarine buoy position
本次潜标释放速度约为1 m/s,水深为5 100 m,因此全部放完需要约2 h。布放潜标时流速在1节左右,顶流释放对地0.5节,2 h路程1.8 km,过靶心点为300 m释放,故靶心点下游1.5 km处开始释放。
海底日变站从布放入水到完成回收,前后时间长达32 d。安全回收后检查发现,两个磁力日变站均无浮游生物附着现象,关键连接部件未受海水腐蚀,外观基本完好。
5 数据分析和讨论
对比分析图4发现,200 m与500 m水深处地磁日变数据走势基本一致,成周期信号特点,相对变化是以一天为周期而周而复始,每天幅度变化在60 nT左右。一天之内具有明显的昼夜差异,日间的幅度波动较大,夜间则较为平静,一般早晨有一个极大值,午后有一个极小值,符合一般地磁日变规律。个别数据有3 nT左右的抖动,推断为在水中受海流的影响摆动造成;所获取的地磁日变数整体光滑、连续,未发生磁暴现象,符合规范要求。
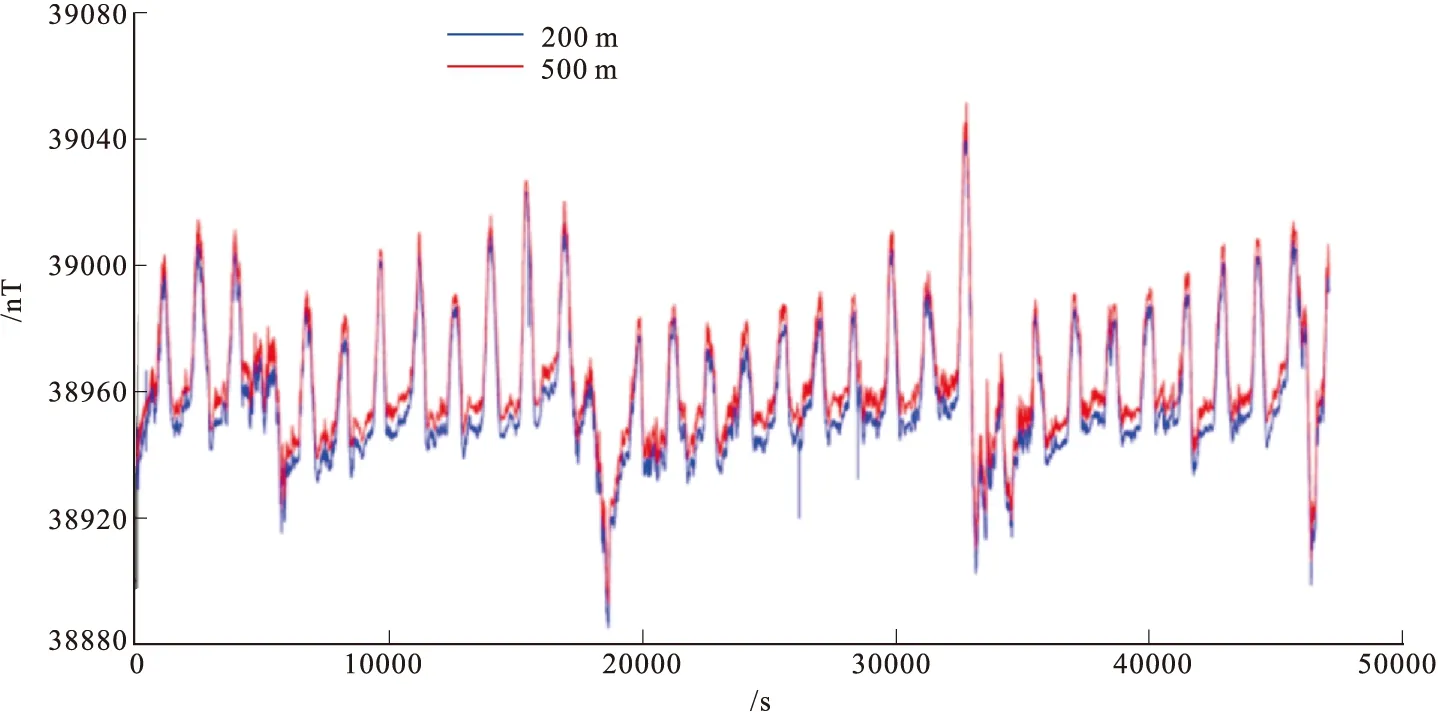
图4 磁力日变曲线图Fig.4 Diagram of geomagnetic diurnal variation
对两组地磁日变数据使用式(9)分别求取标准差,得到水深200 m处的地磁日变数据标准差为0.091,水深500 m处的地磁日变数据标准差为0.089,这是由于随着水深增大,水层对地磁信息有着明显的衰减作用,其保留的信息量逐渐减少导致的。
(9)

在日变站释放点位置,还试验了船载磁力仪方法进行日变测量,利用有人船作为水面平台垂直吊放一台磁力仪在水下100 m处进行日变观测,数据采样率为1 Hz,以观测点为圆心5 km半径范围内漂航方式进行地磁日变数据采集,当船只超出设置的5 km半径区域,启动船只缓慢航行归位至观测点。
利用与工区纬度相近的越南大叻地磁台站日变数据,对潜标、船载和地磁台站三种数据进行对比分析(图5),从图5可以看出,潜标和船载测量的日变数据走势基本一致,但潜标数据较光滑,船载方式采集的数据有跳点。船载测量易受天气和海浪等不可抗拒因素影响,在海面晃动较大,造成磁力仪在水中位置不稳定,因此数据质量比潜标式测量差,但船载方式可以实时观测日变数据,如有磁暴等能够及时发现并通知母船,避免不必要的重复测量。

图5 地磁日变数据对比图Fig.5 Comparison chart of geomagnetic diurnal variation data
与潜标和船载数据相比,越南国际地磁台站数据的幅度变化更大,出现这种差异的原因在于海水和陆地对地磁观测的影响程度不同,海水成分较为单一,而陆地则可能由不同岩性的岩石、泥土、砂砾等物质构成,成分复杂,其频率成份相对比较丰富,因此对地磁观测的影响相比海水影响更为复杂[6],而且由于工区位置和越南国际地磁台站位置相差太远,数据精度可靠性较低,因此远离测区的陆地台站难以反应测区的实际日变化,在测区布设日变站是非常必要的。
综上所述,本次日变观测方法选择合理,日变站位置选择得当,日变数据采集设备工作稳定正常,取得的地磁日变数据可以满足地磁日变改正的要求。
6 实测数据校正
根据《海洋调查规范》(GB/T 12763.8-2007)要求[14],对本次实测磁力数据进行校正,包括拖缆长度校正、日变校正、正常场校正和船磁校正,得到磁力异常值。
ΔT=T-Td-Ts-T0
(10)
式中:ΔT为地磁异常值;T为地磁场总磁场测量值;T0为地磁正常场值;Td为地磁日变偏差值;Ts为船磁影响偏差值。
对比图6、图7可以看出,使用这里潜标系统得到的日变数据进行校正,消除了日变对磁场的影响。为了消除系统误差需要进行测网平差,平差后得到本次工区交点均方差为2.10 nT,符合《海洋调查规范》(GB/T 12763.8-2007)要求,证明了日变数据的准确性。
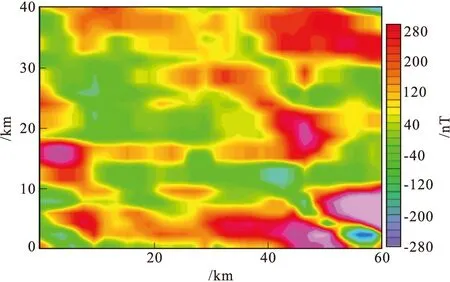
图6 日变校正前磁力异常图Fig.6 Magnetic anomaly map before diurnal variation correction
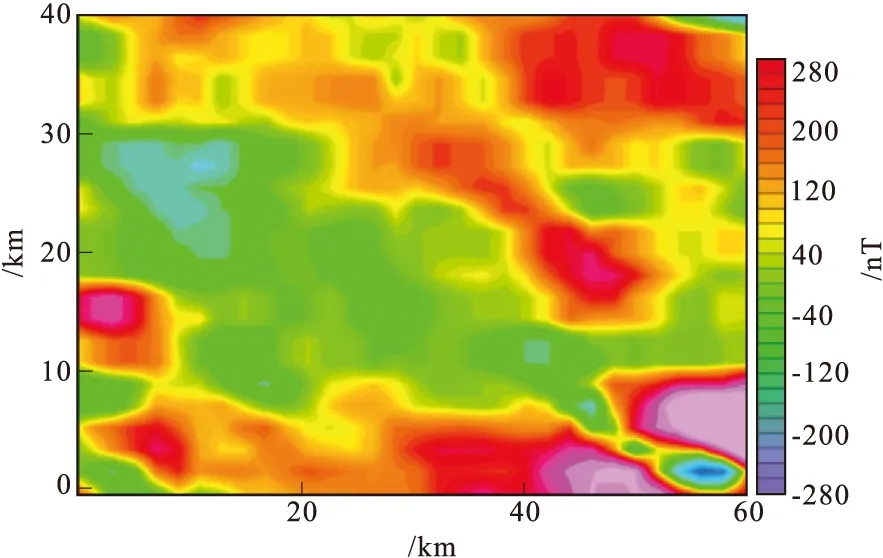
图7 日变校正后磁力异常图Fig.7 Magnetic anomaly map after diurnal variation correction
7 结论
对海底日变站系统进行改进,使其适应在深海行地磁日变测量,从而提高深海日变观测精度和安全性。
1)通过对浮球、磁力仪、声学释放器等装置进行必要的加固连接和改进,并引入三点定位技术提升定位精度,设计了一套适用于深水的潜标式磁力日变观测系统,整套观测系统能够满足长时间连续采集和高效回收的需求,并能消除海水层对磁力日变值的衰减,有效提高地磁日变数据的采集精度。
2)在西太平洋某海域利用潜标系统获取的地磁日变数据平滑稳定,对实测磁力数据进行日变校正,得到的磁力异常结果满足规范要求,证明了此方法的可靠性和安全性,可以为后续磁力日变校正提供宝贵的基础数据。