面向导航增强的低轨星座设计与应用
2022-01-06徐伟证康国华华寅淼许传晓
彭 攀,范 鑫,徐伟证,康国华,华寅淼,许传晓
(1.上海卫星工程研究所,上海 201109;2.上海航天技术研究院,上海 201109;3.南京航空航天大学 航天学院,江苏 南京 210016)
0 引言
我国北斗导航系统已经全面建成,全球卫星导航系统(Global Navigation Satellite System,GNSS)进入新的发展格局,承担着越发重要的时空信息基础设施功能。然而,GNSS 提供的基本定位精度只能达到米到十米级,无法满足传统产业升级和新兴技术发展对分米级、厘米级的实时精准定位需求。
目前,低轨(Low Earth Orbit,LEO)卫星轨道具有高度低、地面接收信号强度高且信号在自由空间损耗少的特点,有利于改善受遮蔽环境下的定位效果,提升抗干扰、防欺骗性能。低轨卫星运动速度快,相同时间内几何图形变化快,观测方程历元间相关性减弱,使得参数的可估性增强,有望从根本上解决卫星载波相位模糊度参数收敛和固定慢的问题。因此,利用低成本、快速响应、搭载导航增强载荷的微小卫星平台,构建低轨卫星星座,可实现导航增强和通信等功能,满足日益增长的高精度定位需求。目前,国际上许多商业机构已经开始部署或提出建设全球低轨卫星星座,包括SpaceX、OneWeb、Boeing、Telesat 以及中国航天科技、科工集团等,在建以及规划建设的低轨卫星数量超过万颗,主要用于建设太空互联网、通信及导航服务平台。
低轨星座构型的设计与其主要服务功能密切相关。如何设计低轨卫星星座,使其能够实现全球范围的覆盖,并提供最佳导航增强性能,这是要解决的关键问题。考虑到低轨卫星在通信、导航和遥感等方面的重要应用,以及低轨卫星的低成本、快速组网能力,低轨星座的构建必将成为未来发展热点。本文主要面向导航增强服务优化设计低轨星座,充分考虑低轨星座的GNSS 增强服务、人口密度分布、低轨空间环境,以及极地航行对导航定位的需求等因素,综合分析设计低轨星座,实现全球覆盖且能有较好的可见卫星分布。
1 星座设计关键要素
1.1 关键要素的论证
GNSS 的覆盖性要求类似,低轨卫星导航增强星座首先要满足全球覆盖的能力,在此基础上尽可能优化星座以提供最优的导航增强服务。因此对卫星数量、星座构型、轨道高度、轨道倾角和地面用户仰角等关键要素都需要进行论证分析。
单颗低轨卫星的可视球冠如图1 所示,卫星天线半张角为α
,轨道高度为H
,对于用户端U
,可见卫星在S
’位置时,其最小地面仰角为ε
,此时用户端、卫星和地心构成ΔOUS
’。
图1 低轨卫星可视球冠Fig.1 Visible area of a low earth orbit satellite
单星覆盖范围取决于卫星覆盖的秋心半角ψ
,该球心角ψ
受轨道高度H
和最小地面仰角ε
约束:
R
为地球半径,取6 378.14 km;H
为卫星轨道高度。由单颗卫星覆盖的球心半角得到其覆盖的可视球冠表面积为

由式(1)~式(2)可知,单颗卫星覆盖面积随轨道高度升高而增大,但卫星的轨道高度越高,其发射成本也越高,且低轨卫星星座需要布局在空间物体密度较低的区域,以降低卫星的碰撞风险。
1.2 低轨卫星星座的论证
目前已部署或提出的商用低轨卫星星座,其中铱星的轨道高度为780 km,其他商用低轨卫星轨道高度大多在1 000~1 500 km 之间。此外,低轨卫星星座在载荷配置方面通常全部或优选部分卫星搭载不同载荷,以实现一星多用,同时开展导航增强、GNSS-R 遥感、掩星探测等科学研究。本文综合考虑卫星的覆盖范围、多星座功能要求、发射成本以及空间环境影响,设计低轨卫星轨道高度为1 000 km。一般通信天线相对于地平面的最小仰角要求5°及以上,本文考虑到低轨卫星的信号强度和空间位置快速变化,取最小地面仰角为ε
=5°,此时由式(1)得卫星覆盖球冠的球心半角ψ
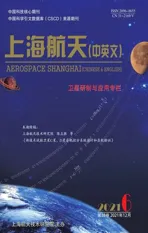
=26°。确定低轨导航增强星座轨道高度后,需要设计卫星轨道倾角和星座构型。从低轨卫星增强的需求出发,本研究要求低轨星座实现全球范围内任意时刻至少有2 颗卫星可见。共轨面的低轨卫星覆盖范围如图2 所示。

图2 共轨面卫星覆盖区域Fig.2 Coverage area of common orbit satellites
在同一轨道面等间隔布置K
颗卫星,其中360°/K
为相邻卫星覆盖圆心间夹角,ψ
为单星覆盖区域的球心半角,ψ
为航天器环中相邻卫星覆盖区域重叠部分的地心角距,即航天器环的覆盖角,r
表示航天器环覆盖带的半宽,ψ
、ψ
和K
的关系如下所示:
2 低轨导航星座设计
2.1 低轨导航增强星座设计
在满足星座覆盖性要求的基础上,在星座导航增强应用中,卫星几何构型分布是影响增强性能的关键要素。因此,本文考虑优化低轨星座增强北斗导航系统在全球(特别是中低纬度地区)的时空分布均匀性,即组合导航系统的空间位置精度因子(Position Dilution of Precision,PDOP),对比分析单构型和复合构型2 种星座设计方法,优化设计了一种全球覆盖且均匀分布的低轨导航增强星座。
2.2 单构型低轨星座设计
单构型星座要满足低轨星座对全球范围内任意时刻至少2 颗卫星覆盖,需要相邻轨道面间的距离小于r
。对于覆盖半角ψ
=26°的卫星,单构型的低轨星座轨道倾角需在64°~116°范围内,才能实现对极地区域的覆盖。参考经典的铱星星座极地轨道构型,取轨道倾角为90°,轨道在赤道附近的覆盖投影如图3 所示。
图3 单一构型星座赤道处覆盖投影图Fig.3 Coverage projection of the single constellation at equator
低轨卫星增强GNSS 的定位服务需要高可靠性,每个历元全球任意区域至少实现2 颗卫星在可视范围内,因此需要相邻轨道升交点间隔小于ψ
,即ψ
≥180°/P
。由于卫星数量是有限整数,因此,结合式(1)、式(3),可通过穷举法得出卫星数量最少的星座方案。其主要参数见表1,共需要100 颗低轨卫星组网服务。

表1 单一构型星座方案参数Tab.1 Parameters of the single constellation scheme
单构型星座倾角较大,相邻极轨的间距从赤道向两极不断减小,造成可见卫星数量随纬度升高而快速增加,该星座10 min 内全球范围内平均可见星数量的分布如图4 所示。

图4 单一构型星座平均可见星数量Fig.4 Distribution of the average number of visible satellites in the single constellation
由图可见,单构型低轨星座覆盖性随纬度递增变化趋势明显,在赤道附近仅有1~3 颗可见卫星,而高纬度地区数量为10~15 颗。结合全球范围的人口分布来考虑,高纬度地区人口密度低但卫星覆盖率过高,造成卫星资源严重浪费。因此,单构型星座设计尽管可以实现全球覆盖,但覆盖资源极其不均匀,且可优化空间有限,不利于面向全球的高可靠性的导航增强服务。
2.3 复合构型低轨星座设计
考虑到极轨/大倾角轨道对高纬度地区覆盖效果较好,小倾角轨道对低纬度地区覆盖较好,但其无法覆盖高纬度地区,因此设计大倾角轨道和小倾角轨道复合构型星座,以实现对全球范围内的均匀覆盖。结合单构型低轨星座设计方案,大倾角轨道仍然采用极轨,使其对全球至少实现一重覆盖。基于相邻轨道顺行的假设推导,设计相邻轨道的卫星相位差保持为180°/K
,极轨在赤道附近的覆盖投影如图5 所示。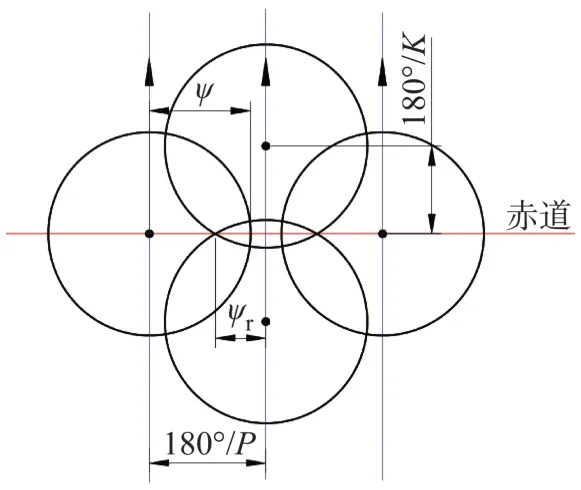
图5 复合构型星座极轨部分覆盖区Fig.5 Partial coverage area of the polar orbit of the composite constellation
当轨道和卫星分布满足ψ
+ψ
≥180°/P
时,可以实现持续的单星覆盖。在设计大倾角低轨星座时,初步设定轨道面P
=6,每个轨道面卫星数量K
=8,此时各轨道卫星环的覆盖带半角ψ
=arccos(cos26°/cos22.5°)=13.4°,得到ψ
+ψ
=39.4°>180°/P
,因此,满 足单星覆盖的条件。大倾角星座轨道分布如图6 所示。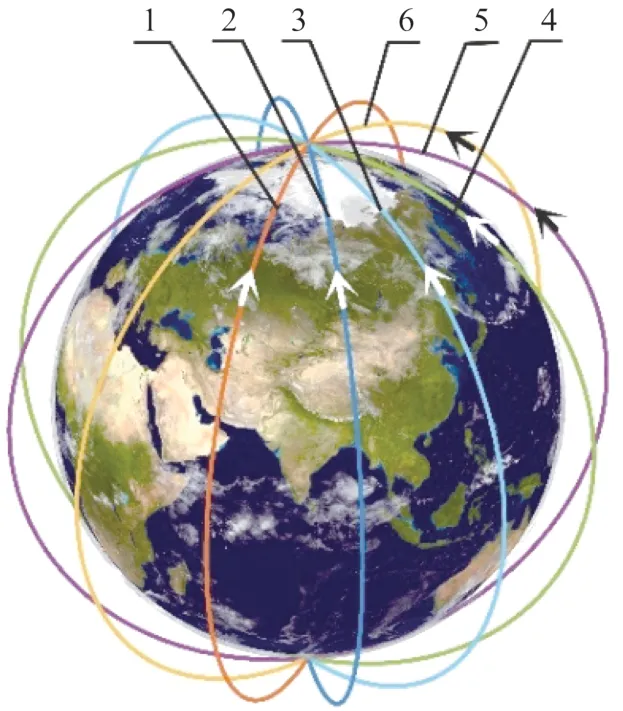
图6 复合构型星座极地轨道Fig.6 Polar orbit distribution of the composite constellation
由图6 可知,在相邻轨道顺行的情况下,首尾2个轨道面,即图中轨道1 和轨道6 相邻但互为逆行,无法保持恒定的相位差,可能出现少数地区在某段短暂时间内无法被覆盖的情况。
阴影区域如图7 所示,该区域在地球表面是近似菱形的不规则形状,最大跨度约为180 km,对应球心角约为1.6°,该区域内无法实现连续覆盖。
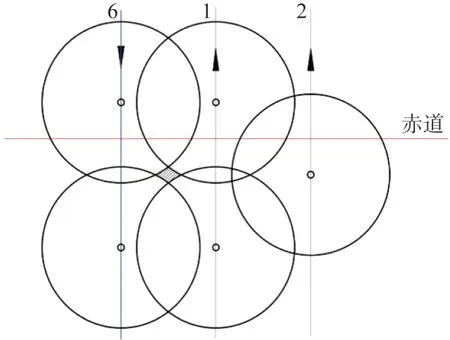
图7 极轨卫星覆盖间隙Fig.7 Coverage gaps of polar orbit satellites
因1 和6 两条轨道上的卫星之间运行角速率相同,即在一定初始相位差下,如不考虑轨道摄动,图示的阴影区域出现的纬度位置是固定的,会同时在南北纬11.25°的位置周期性出现,而在更高的纬度,因轨道间距减小,不会出现覆盖间隙。
同时,由于地球自转,该区域所在经度位置是变化的,长期来看,在南北纬11.25°附近的同一纬度带均会出现短时间内无法连续覆盖的情况。选取地球表面11.25°(N)、160°(E)作为目标点,进行24 h可见星数量统计,结果见表2。
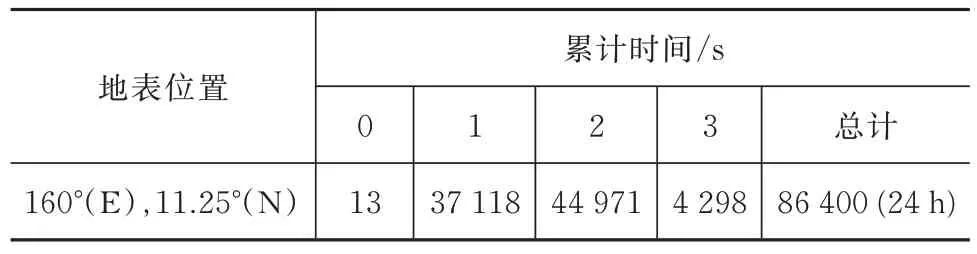
表2 极轨星座可见星数量统计表Tab.2 Number of visible satellites in polar orbits
由仿真结果可见,在覆盖间隙中心的地区,一天内无可见星的时间仅有短暂的13 s。低纬度地区绝大多数时间都有1~2 颗卫星可见。此时减少P
、K
都会导致覆盖间隙增大,而增加卫星数量对性能的提升有限,且将大幅增加成本,故最终取P
=6,K
=8。考虑到中低纬度人口密度大,对高精度导航定位服务需求更高,因此在极轨星座的基础上,设计加入小倾角轨道星座,对中低纬地区补充覆盖。小倾角轨道星座适合采用Walker 构型。赤道附近的小倾角轨道覆盖区域投影如图8 所示。与第一组极轨不同的是,小倾角Walker 星座相邻轨道面的运行方向都是相同的。规定每个轨道升交点处的相位为零,仿照极轨的设计方法,相邻轨道临近卫星相位差取180°/K
。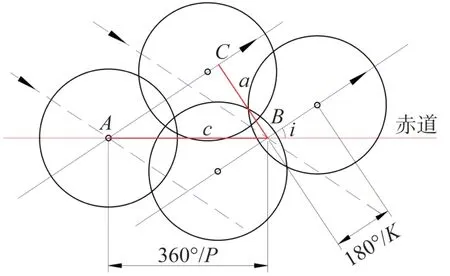
图8 复合构型星座小倾角轨道部分覆盖区示意图Fig.8 Partial coverage area of the composite constellation in small inclination orbits
如图8 所示,A、B
两个星下点分别为2 个相邻轨道的升交点,C
是与A
同一轨道面相邻卫星的星下点。A、B、C
三点构成球面直角三角形,a、c
分别为三角形两边对应的球心角。记轨道倾角为i
,要实现相邻轨道间至少单星覆盖,需要满足
c
=360°/P
。轨道周期内单个卫星星下点纬度最高为i
,此时60°纬线被覆盖球冠所截弧长(如图9 所示,弧长AB
)为πR
arccos(cosψ
/cos(60°-i
))/90°,60°纬线周长为πR
/P
,为实现小倾角轨道星座对南北纬60°范围内的覆盖,需满足

图9 覆盖球冠截取纬线示意图Fig.9 Weft interception by visible area
Walker 星座轨道数以偶数为佳。结合大倾角轨道构型设计,为获得较好的对称性,同样取轨道面P
=6,每个轨道面的卫星数K
=8,则根据由式(4)~式(5)可取轨道倾角i
=40°。综上所述,复合构型星座的2 组轨道的主要设计参数见表3,复合构型星座的空间布局如图10 所示。
图10 复合构型星座空间布局Fig.10 Space layout of the composite constellation

表3 复合构型星座方案参数Tab.3 Parameters of the composite constellation scheme
考虑到小倾角Walker 星座的特性,赤道附近会被两条轨道面分别经过升交点和降焦点的卫星同时覆盖,即Walker星座可对低纬度地区实现双星覆盖。小倾角轨道不仅补充覆盖极轨的低纬度覆盖盲区,而且使得可见星数量在纬度上分布更均匀,在卫星总数基本相当的情况下,复合构型星座相比单一构型,显著提升全球覆盖性能。复合构型星座10 min内全球各地平均可见星数量的分布如图11 所示。

图11 复合构型星座平均可见星数量Fig.11 Average number distribution of visible satellites in the composite constellations
由图11 可见,低纬度地区可见星数量3~5,极小部分区域2 颗,高纬度地区7~9 颗,平均可见星数量随纬度升高整体仍然呈增加的趋势。但是相比于单一构型星座,复合构型星座的可见星数量在全球的分布更均匀,覆盖性能更好,更能满足全球覆盖的导航增强需求。
因此,本文后续将基于复合构型的低轨导航增强星座开展各项研究与应用。
3 低轨星座增强性能分析
3.1 空间位置精度因子(PDOP)
卫星导航系统的可用性一般包括可见卫星数和精度因子(Dilution of Precise,DOP)。定位误差的方差是用户等效测距误差经权系数矩阵的放大而来,通常用精度因子来表征观测方程的权系数矩阵G
对用户测距误差的放大。精度因子可以从权系数矩阵G
中得出,G
可以通过观测方程的系数矩阵H
计算得到,其计算式和定位误差协方差阵可以表示为
因此,三维空间误差的标准差可表示为

P
可表示为
P
可以反映卫星和测站的空间关系对最终定位误差的影响,是对相对测量误差的放大系数。在导航定位位置精度描述时,通常用P
来评价导航星座的可用性。可见卫星数量不能反映用户的定位精度,在用户等效测距误差一定时,定位精度完全由P
决定,更小的P
可以有效降低最终定位误差。PDOP 是由观测方程的权系数矩阵G
计算可得,且权系数矩阵G
只与可见卫星的几何分布有关。有研究表明,GPS 系统的PDOP 分布较为均匀,大致在1.2~4.0 之间。而我国北斗导航系统由混合星座组成,其PDOP 对经度和纬度变化较大,变化范围在1.5~5.0 之间。低轨卫星增强下的北斗三号导航系统,其任意时刻、任意地点的可见卫星数量得到明显提升,空间几何分布情况更好,故低轨卫星增强的北斗导航系统PDOP 得到了有效改善。在用户等效测距误差一定的情况下,更小的PDOP 可以有效降低最终定位误差。
3.2 低轨星座覆盖性能分析
基于复合构型的低轨导航增强星座(参数见表3),以及北斗三号导航系统,包括5 颗GEO、3 颗IGSO 和24 颗MEO 卫星,分析低轨星座的覆盖性及对PDOP 的改善作用。结合3.1 节的PDOP 概述,低轨卫星增强北斗导航系统,其全球范围内的分布和快速几何构型变化,在可视卫星PDOP 将会实现较大的改善。对此,本文仿真测试了北斗三号系统在全球范围内的瞬时PDOP 以及低轨卫星增强的北斗导航瞬时PDOP,分别如图12、13 所示。

图12 北斗三号导航系统的瞬时PDOP 分布Fig.12 Instantaneous PDOP distribution of the Beidou-3 navigation system
北斗三号导航系统的瞬时PDOP 在亚太地区可以实现较优的取值,且中、低纬度地区的PDOP要优于高纬度地区,这与北斗导航系统的异构星座有关,其中GEO 卫星和IGSO 卫星对亚太地区有更多覆盖,MEO 轨道倾角为55°,对中、低纬度地区的覆盖性更好。

图13 低轨星座增强北斗三号导航系统的瞬时PDOP 分布Fig.13 Instantaneous PDOP distribution of the LEO constellation-enhanced Beidou-3 navigation system
低轨星座增强后的GNSS 的PDOP 得到了极大优化,全球范围内的PDOP 都得到了有效改善,特别是亚太地区,PDOP 值整体小于1,结合用户等效测距误差将有效改善定位精度。在南北纬70°~80°之间存在一条明显的PDOP 高于周边的区域,该区域是由于复合低轨导航增强星座的构型所致,其中低轨卫星轨道倾角40°,恰巧无法覆盖南北纬70°~80°,极地区域由于极轨星座的交汇,其覆盖性较好,可以满足极地远洋航行导航行为的需要。整体来看,本文设计的复合构型低轨导航增强星座,可以极大地改善北斗三号系统覆盖性,有效改善全球范围内的PDOP,进而优化导航定位服务的精度和可靠性。
为进一步分析该复合构型低轨导航增强星座的可见性,本文选取高、中、低纬度的地点进行24 h的低轨卫星可见数量及时长分析,统计结果见表4。

表4 不同纬度典型城市24 h 可见星数量和时间统计表Tab.4 Statistics of the number and time of visible satellites in typical cities at different latitudes within 24 hours
故可见卫星为N
(N
=3~9)颗时,随纬度升高可见时长呈现降低的状态,整体来看随纬度升高,可见卫星的数量和时长在上升。这种现象与复合星座的轨道倾角有关,在两组星座的覆盖边缘地带,可见卫星短暂出现仅可见2 颗的情况。在南北纬11°左右,由于轨道面顺行和逆行的交汇,也导致有较小区域存在短时间内仅可见两颗卫星的情况。4 结束语
在北斗卫星导航系统全面建成的背景下,本文首先分析了增强北斗导航系统定位服务的有效方案,统筹考虑增强效果、覆盖性能、人口分布和空间环境等因素,然后设计了单构型低轨导航增强星座和两组Walker 星座组合的复合构型低轨导航增强星座,并进一步分析2 种星座对地覆盖性能。
仿真结果表明:大倾角单构型低轨导航增强星座对极地区域覆盖性能较好,但对于中低纬度存在无法连续覆盖的情况,对于卫星数量要求较高;复合构型的低轨星座可以实现对低、中、高纬度的全面覆盖,充分补充我国北斗导航系统,满足低轨卫星导航增强的需求。