离心压缩机出口动态压力的最大Lyapunov指数特征研究
2022-01-05刘雁,高宽,何浩,黄炎,肖军
刘 雁,高 宽,何 浩,黄 炎,肖 军
(1.西北工业大学 机电学院,西安 710072;2.合肥通用机械研究院 压缩机技术国家重点实验室 ,合肥 230031)
喘振是离心压缩机固有的一种典型故障,由于存在气流的剧烈脉动和周期性振荡,容易加剧压缩机的磨损、使其机械部件发生变形。这会给离心压缩机带来巨大的危害性,甚至引发重大安全事故。因此,在工业现场,实现离心压缩机喘振的早期检测非常必要。
目前,对离心压缩机喘振的研究主要从两个方面展开:①基于数学模型法,即Greitzer[1]集中参数模型及其衍生的相关模型,主要研究压缩机结构参数的变化与系统稳定性之间的关联关系;②基于试验测试的数据分析法,由于离心压缩机的工作状态与压缩机的出、入口及叶轮处的动态压力密切相关,且压缩机是否发生失稳可以通过动态压力的变化反映出来。因此,通过分析离心压缩机不同工作状态下的动态压力的特征量,分析出当前压缩机的工作状态,进而预测压缩机后期的工作状态。近年来,研究人员通过分析进口、出口和叶轮的动态压力研究喘振现象。其中,孙涛等[2]用关联积分值定量描述了离心压缩机的失稳和喘振程度。Xue等[3]提取了一个表征离心压缩机转速瞬态混沌分岔确定性的特征指标。Sun等[4]演示了通过声学信号捕捉失稳现象的一种方法,并提供了一种声学测量技术来检测压缩机整个生命周期中的任意时刻的失稳状态。陈振等[5]提出了一种新的对旋转失速和喘振的非线性反馈控制策略,即把压升作为反馈信号,来补偿节流阀系数值。Liu等[6-8]分别从分形动力学和熵的角度研究了离心压缩机出口压力的非线性特征,并获得了一些重要的结论。这些研究表明,离心压缩机的出口动态压力存在丰富、复杂的非线性特征,因此可以将非线性分析方法应用于离心压缩机喘振的研究中。
Lyapunov指数作为一类重要的非线性参数,通常用来定量地描述非线性系统的混沌程度,近些年来被广泛地用于复杂系统的动力学特性研究和数值预测中。如Deng等[9]采用最大Lyapunov指数分析了水轮发电机的随机全局稳定性和分岔问题。Saikia等[10]研究了Lyapunov指数在帕金森病脑电图诊断中的意义。Wu等[11]将小波变换、粒子群优化动态灰色模型和Lyapunov指数预测方法相结合,并将其应用于短期风电场的预测。Picano等[12]通过对最大Lyapunov指数的研究,设计了智慧城市的乘客需求预测方法。伍友利等[13-14]研究某型发动机的八级轴流压气机级间压力信号的最大Lyapunov指数,推断出失速和喘振的起始点具有相同的动力学特性,提出将最大Lyapunov指数的零点作为失速的判据。刘中胜等[15]研究了风力机地震诱导机舱振动非线性特性分析,发现地震诱导振动时程曲线最大Lyapunov指数与地震强度之间存在较大的相关性。刘雁等[16]采用最大Lyapunov指数对局域网络流量的变化趋势进行了预测,具有一定的效果。鉴于离心压缩机出口动态压力中包含丰富的非线性特征,从非线性角度研究离心压缩机出口动态压力的最大Lyapunov指数与出口压力实时序列之间的关系,具有理论及实践意义。
1 相关理论
1.1 时间序列的相空间重构
在采用最大Lyapunov 指数对离心压缩机出口动态压力进行分析之前,需重构出口动态压力信号的相空间。由于系统的任意分量的演化都是由系统中与之相关的分量决定的,系统的信息一定会隐含在任意分量的发展过程中,因此通过考察一个分量,对其在一定时间间隔下的测量值进行分析,可以提取系统的非线性特征。20 世纪80年代,Takens[17]提出著名的Takens定理,该定理是相空间重构的理论基础。根据Takens定理,对于一维时间序列X={x1,x2, …,xN},其相空间重构的基本过程如下:
步骤1选择合适的重构参数,即嵌入维数m和时间延迟τ。
步骤2从x1开始取值,每一个值的往后延迟时间为τ,共取m个值,则得到m维相空间中的第1个点
Y1=(x1,x1+τ,x1+2τ,…,x1+(m-1)τ)
步骤3去掉x1,以x2为第一个数,采用步骤2中的方法得到相空间的第2个点
Y2=(x2,x2+τ,x2+2τ,…,x2+(m-1)τ)
步骤4对于长度为N的时间序列,依次可得到由M个相点构成的m维相空间
Y1=(x1,x1+τ,…,x1+(m-1)τ)
Y2=(x2,x2+τ,…,x2+(m-1)τ)
…
YM=(xM,xM+τ,…,xM+(m-1)τ)
(1)
式中,M=N-(m-1)τ,Yi(i=1,2,…,M)为重构m维相空间中的相点。这样,相点间的连线就可以描述系统在m维相空间中的演化轨迹,该轨迹也称为重构吸引子,显然,重构吸引子中总共有M个点。也就是说,经过相空间重构,由一维N个点的时间序列得到了m维的重构吸引子。
实现相空间重构的重要的一个环节在于步骤1,即选择最优的重构参数嵌入维数m和时间延迟τ。因为,所构建相空间中的吸引子应具有较低的重复性和较强的相关性,因此在选择重构参数的过程中,需要对重构吸引子几何上的重复性和相关性做出评估。确定重构参数的方法有多种,主要分为两类:第一类,认为两个重构参数的选取是独立的,如自相关函数法和互量信息法等,这些方法通过评估重构吸引子的自相关性、总体关联量等信息,分别确定两个参数;第二类,认为τ和m的选取是相互依赖的,如C-C算法,这种方法是通过统计的手段,同时确定两个参数[18]。由于C-C算法具有适用于小数据量,计算方便的优点,本文中拟采用C-C算法计算重构参数延迟时间τ和嵌入维数m。
1.2 最大Lyapunov指数的物理含义
Lyapunov指数是定量分析混沌运动的特征参数。混沌运动可能存在于世间一切的复杂运动中,其基本特点就是对初值极为敏感,在相空间中,两个很靠近的初值所产生的两条相轨迹,会随时间的推移按照指数方式分离,Lyapunov指数就是定量描述这一现象的物理量。
设F是Rm→Rm上的m维映射,它可以确定一个m维离散动力系统
xn+1=F(xn)
(2)
假设该系统的初始条件为一个足够小的m维的小球,经过时间t的演化,小球将变为椭球,将椭球的所有主轴按其长度顺序排列,则第i个主轴所对应的Lyapunov指数可以根据第i个主轴的长度Pi(t)的增加速率定义为
(3)
将所有的Lyapunov指数按大小排列为
λ1≥λ2≥λ3≥…≥λm
(4)
式中,λ1为系统的最大Lyapunov指数。
Lyapunov指数可能为正,也可能为负。Lyapunov指数为正表示系统的演化轨迹在对应方向上是发散的。Lyapunov指数为负表示系统的演化轨迹在对应方向上是收缩的。如果所有的Lyapunov指数均为负,则系统将趋于静止;如果最大Lyapunov指数为零而其余Lyapunov指数为负,则系统做周期运动;如果存在正Lyapunov指数,则系统做混沌运动。因此,识别系统是否做混沌运动只需判断最大Lyapunov指数是否为正,而不需要计算出所有的Lyapunov指数,这样就可以极大的减少计算量。并且,最大Lyapunov指数越大,系统中的混沌特性越明显,混沌程度越高。
1.3 最大Lyapunov指数的计算
对于时间序列重构的相空间,常用的计算最大Lyapunov指数方法有定义法、Jacobian方法、Wolf算法、P-范数法、小数据量法、奇异值分解法等。其中,小数据量法具有小数据组计算可靠,容易操作,计算工作量比较小等优点,本文采用小数据量法计算离心压缩机出口动态压力的最大Lyapunov指数λ1。其计算过程如下[19]:
在如式(1)所示的重构相空间中,寻找给定轨迹上点Yj的最近邻近点Yk,并限制短暂分离,即

(5)
式中,p为时间序列的平均周期,可以通过能量谱平均频率的倒数估算,也可采用平均延迟时间窗口τw代替p。τw可由式(6)计算
τw=(m-1)τ
(6)
经过i个离散时间步长后,计算距离
dj(j)=‖Yj+i-Yk+i‖i=1,2,…,min(m-j,m-k)
(7)
假设参考点Yj与其近邻点Yk之间的距离具有指数发散的特性,那么
dj(i)=Cjeλ1(iΔt),Cj=dj(0)
(8)
将式(8)取对数得
lndj(i)=lnCj+λ1(iΔt),j=1,2,…,N
(9)
由式(9)可知,lndj(i)~i线在一定范围内满足线性关系,其斜率为λ1Δt。计算所有j对应的lndj(i),并求其平均值,然后作出曲线
(10)
式中,q为非零dj(i)的个数。最大Lyapunov指数相当于式(10)表示的一簇直线的斜率,通常在y(i)曲线的线性区间内采用最小二乘法进行拟合,该区间内的斜率即为最大Lyapunov指数。
1.4 最大Lyapunov指数与离心压缩机出口动态压力
若将离心压缩机出口管道气体运动的数学模型作为一个动力系统,则出口动态压力为这个动力系统中的一个状态变量。可以认为,该系统是一个复杂系统,其中可能包含混沌运动、周期运动和趋于静止的运动。最大Lyapunov指数的大小可以反映系统在其动态行为中的状态。当最大Lyapunov指数较大时,表明所分析时段的出口动态压力在一定范围内处于无序波动,此时该系统主要表现为混沌运动,而且最大Lyapunov指数越大,系统表现出的不确定性、不可重复、不可预测越为明显,其随机特性越强。而当最大Lyapunov指数接近于零时,出口动态压力的周期性变强,表现为周而复始的振荡现象。
2 离心压缩机出口动态压力采集及频率特性
2.1 离心压缩机出口动态压力采集系统
数据采集系统的结构方案,如图1所示。试验在国内某鼓风机动力集团的离心压缩机实验室内完成,该实验室的压缩机由一台800 kW的直流电动机提供动力。当压缩机工作时,处于室温状态的大气,首先经过进气过滤器进入工作管路,大量的气体存储于风室中等待压缩,然后进入离心压缩机压缩。压缩后的气体由两个直径分别为250 mm和100 mm的电动防喘振阀控制,经由出口管道及排气消声器排入大气。
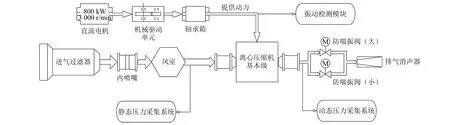
图1 采集系统
系统出口动态压力变化的采集由动态数据采集系统完成,所采集的压力为气体静压。动态数据采集系统的传感器为Kulite的动态压力传感器,此传感器的固有频率高且具有加速度补偿功能,安装方便。考虑到数据采集的便捷性及可靠性,将传感器安装在距离压缩机出口1 m处的出口管道上。动态数据采集系统为美国晶钻公司的CoCo-80,此系统可用于振动采集和状态监测。
为确保喘振试验的安全性及试验数据的可靠性,本试验由压缩机实验室的专业技术人员完成试验操作。技术人员通过控制防喘振阀的开度使离心压缩机系统由正常工作状态进入喘振状态。
由于离心压缩机在喘振时有噪声过大、机壳轴承振动、出入口流量变化、转速波动大等特点[20],专业技术人员将根据预先设置的喘振线、现场噪声以及出口动态压力的变化曲线预估喘振工况。
试验时压缩机工作在额定转速,试验过程共635.5 s,本文选取150~250 s的数据进行分析,该时段包含稳态,过渡状态和喘振状态。以150 s作为起点,在该时段的初始状态,离心压缩机处于正常工作工况,从第42~52 s逐渐关闭防喘振阀,使离心压缩机的工况逐渐进入喘振状态,第53 s之后,离心压缩机的工况完全进入喘振状态。
2.2 出口动态压力波形及频率特性
动态压力采集系统采集到的部分出口动态压力波形图,如图2所示。波形总长为100 s。从图2可知,出口动态压力经历了稳态、过渡过程和喘振三个阶段。在20~30 s时段,出口动态压力处于稳态阶段,此时出口动态压力幅值较小,在-0.5~0.5 kPa 内波动(见图2(b));在45~55 s时段,动态压力逐渐增加,此时压缩机由过渡状态进入喘振,且出口动态压力幅值在52~54 s迅速增大(见图2(c))。在70~80 s时段,离心压缩机系统完全进入喘振状态,出口动态压力波动值达到-1.7~1.7 kPa,且波形表现出周期振动(见图2(d))。

图2 离心压缩机出口动态压力
出口动态压力波动的时域特征可以通过极差、方差、标准差等特征量来衡量。出口动态压力波动的方差变化图,如图3所示。从图3可知,离心压缩机由稳态经过喘振时其出口动态压力的变化。
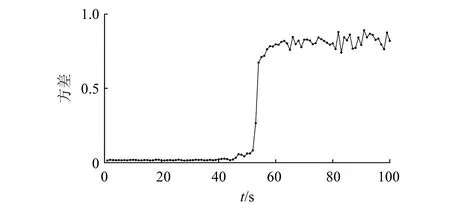
图3 出口动态压力的方差
选取离心压缩机在稳定运行、过渡过程和喘振三种工作状态(20~30 s,50~55 s和70~80 s)的动态压力序列做频谱分析,其频谱密度曲线如图4所示。
结合图2与图4的波形可知,随着失稳状态的加深,系统进入喘振状态,出口波形开始表现出规律振动,波动周期变长,此时的频率分布也越来越向低频(15~20 Hz)处集中,出口动态压力逐渐呈现为一个周期运动,其规律性随着失稳状态的加深而增强,这一特性与压缩机喘振的发生机理一致,因为压缩机在发生喘振时,出口管道的气体在轴向会出现周期性的低频晃动。
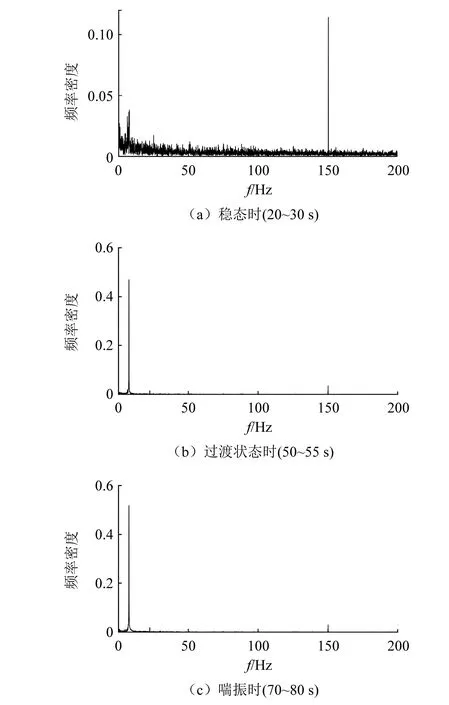
图4 出口动态压力的频谱图
3 出口动态压力的最大Lyapunov指数
3.1 出口动态压力的最大Lyapunov指数
在计算离心压缩机出口动态压力的最大Lyapunov指数之前,需要进行相空间重构。选取出口动态压力数据中1 s的数据为计算单元,即将100 s的数据分为100段,每段进行一次相空间重构,计算所得的重构参数如图5所示。
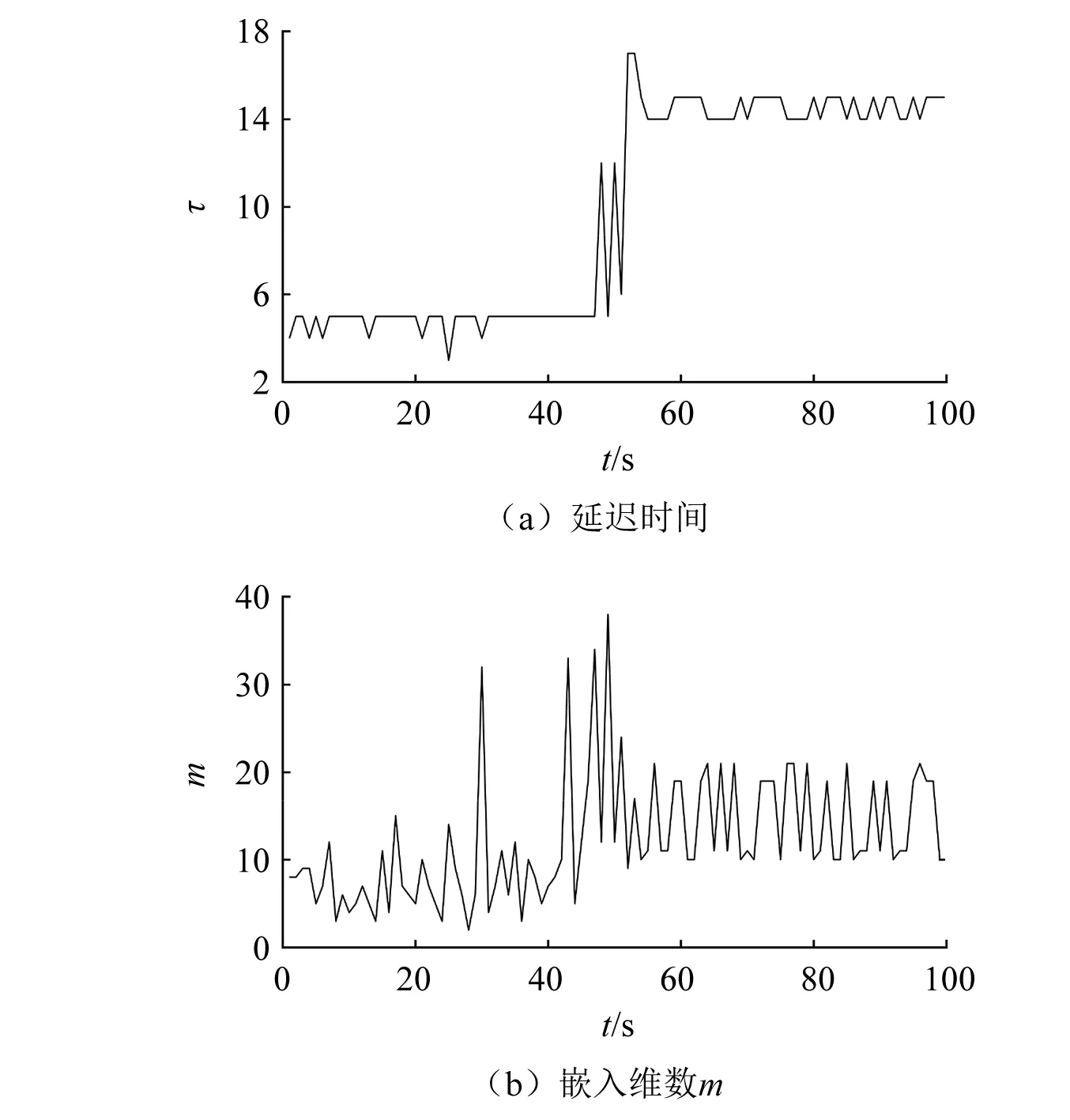
图5 相空间重构参数
从图5可知,离心压缩机正常工作时,延迟时间τ取值范围小,嵌入维数m的值较小但波动量变化较大;在过渡过程中,延迟时间τ与嵌入维数m明显的增加,且均出现剧烈的波动;在喘振时,延迟时间τ取值较大,而嵌入维数m的值和波动均比稳态时大。从出口动态压力的相空间重构参数中延迟时间τ的计算结果可知,离心压缩机在稳态时的动力特征比喘振时复杂,相空间中吸引子的演化规律相应也较为复杂。
以1 s的时间序列为分析单元,根据表1所示重构相空间的参数,离心压缩机出口动态压力在三种工作状态(20~25 s,51~55 s,70~75 s)的最大Lyapunov指数计算图,如图6所示。根据式(10),对图6中每一条曲线选择合适的线性区间,则区间内曲线的斜率即为对应时段的最大Lyapunov指数。由于在不同工作状态下,离心压缩机出口动态压力的最大Lyapunov指数计算图的线性区间不同,如果线性区间选择不合适会影响最大Lyapunov指数的准确性和后续分析的合理性。由图6可知,在稳态时线性区间较小,这里我们选择0~30即可。而在过渡状态及喘振时线性区间范围较宽,选择0~100更为合适。图6所示时段的相空间重构参数和最大Lyapunov指数,如表1所示。
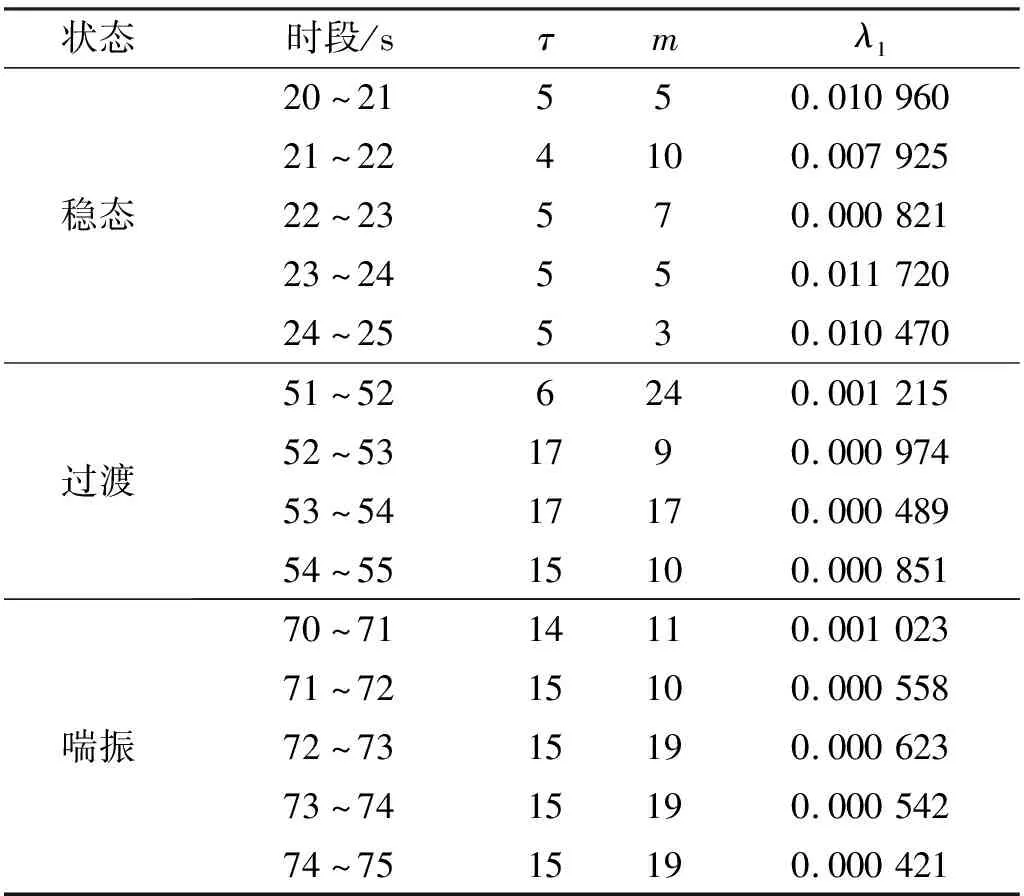
表1 动态压力的混沌参数
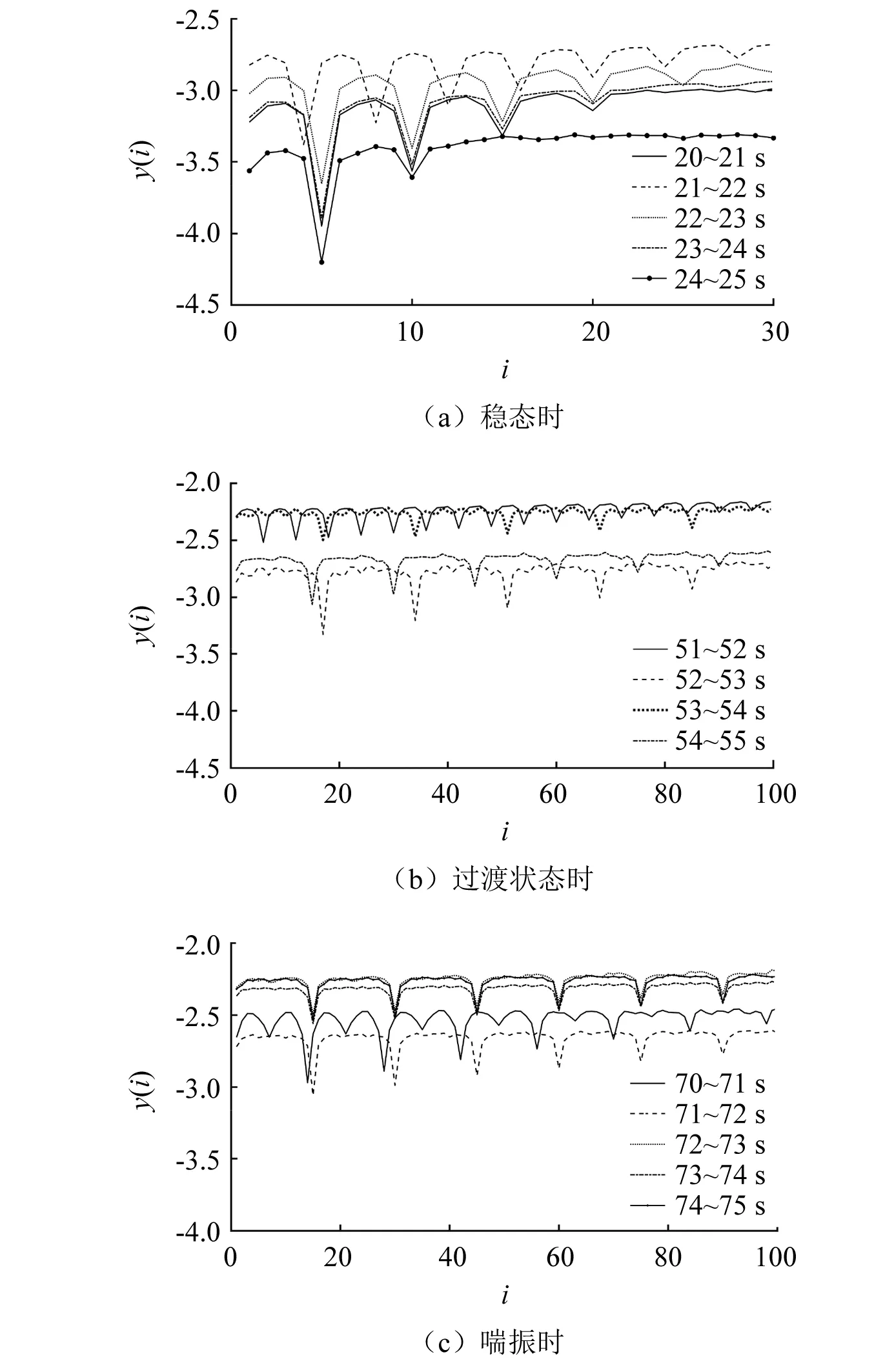
图6 Lyapunov指数计算图
整个工作时段的最大Lyapunov指数,如图7所示。由图7可知,离心压缩机在正常工作状态时和发生喘振时的最大Lyapunov指数差别较大。在稳定状态下,最大Lyapunov指数较大,系统的混沌性较强,可预测性较差,具有较强的蝴蝶效应。而且,在稳态时的最大Lyapunov指数波动明显,表明系统的复杂度较高,因为系统内在的混沌行为的存在,使系统受到初始条件的影响较大;随着压缩机喘振的出现和加深,最大Lyapunov指数较小且变得稳定,并接近于0,系统的复杂度下降,混沌性减弱。可以判定此时出口管道中的气体的主要波动为近似周期振动。
最大Lyapunov指数变化规律在47~48 s时发生了较大变化,由较大的波动范围变为较小的波动范围,由较大的平均值变为较小的平均值(见图7)。根据图3及现场专业技术人员的判断,喘振的出现位于53~54 s。也就是说,在初始喘振前的过渡过程时的最大Lyapunov指数变化很大,针对此次测试处的出口动态压力信号,我们可以提前约5 s对喘振状态进行预警,但在实际应用过程中,预测喘振的发生点与阀门关闭速度存在关联关系,需根据现场情况进行调整。
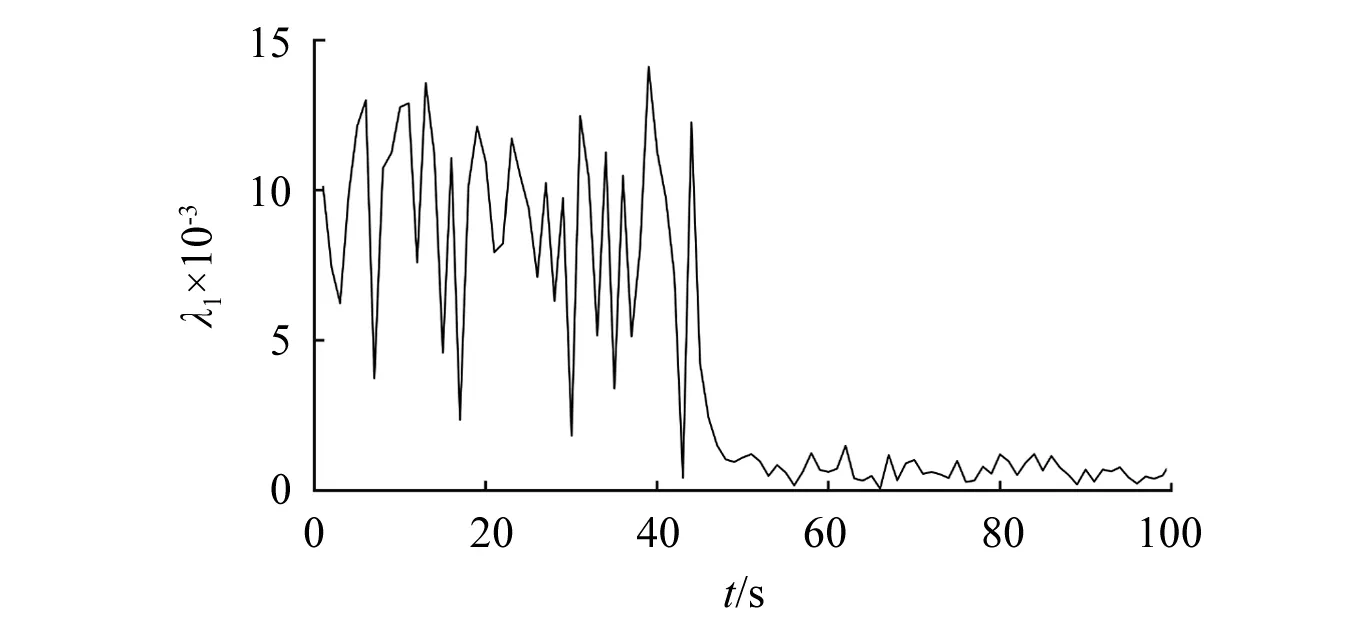
图7 最大Lyapunov指数
3.2 离心压缩机出口动态压力的最大Lyapunov指数抗干扰性能分析
采用相空间重构和最大Lyapunov指数对离心压缩机出口动态压力进行分析时,一维信号会经过一个投影到高维相空间的过程。因此,在分析计算时,微小的干扰信号和底噪信号经过相空间重构,在能量上会进行分散,不会对Lyapunov指数随喘振变化的规律造成较大影响。因此,该方法应具备抗干扰能力。为验证这一结论,本文在采集的出口动态压力的基础上,再加入一定比例的噪声信号,对照加入噪声前后的最大Lyapunov指数计算结果,分析该方法的抗干扰性能。我们对原始出口动态压力的时间序列中加入压力峰值的5%的服从均方分布的随机信号作为干扰信号。同样以1 s为分析单元计算引入干扰信号的离心压缩机出口动态压力的最大Lyapunov指数,如图8所示。
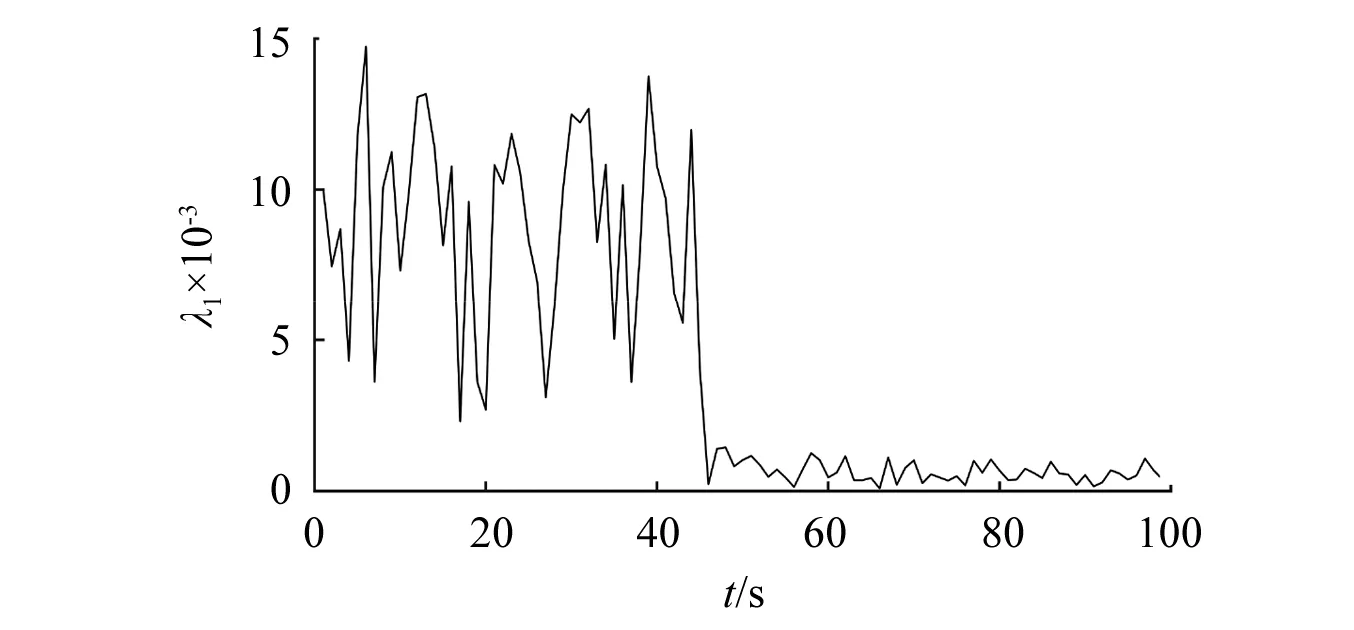
图8 加入干扰后的最大Lyapunov指数
和图7相比较,在加入干扰信号以后,出口动态压力的最大Lyapunov指数变化趋势几乎一致。在离心压缩机处于稳定时,最大Lyapunov指数的值较高,但波动比原始信号的最大Lyapunov指数要剧烈一些,表明引入干扰信号以后,系统的复杂度有所增加,混沌特征仍十分明显;而离心压缩机处于喘振状态时,引入干扰信号对最大Lyapunov指数影响较小,波形变化不大,接近于零,同样可以判断动态压力在做近似的周期振荡。因此,系统在不同的工作状态下最大Lyapunov指数的抗干扰性能存在一定差异,在喘振状态的抗干扰性能好于稳态。但是,采用最大Lyapunov指数仍可以较为清晰的分析出系统的稳定和失稳状态,尤其是喘振状态的识别。
4 结 论
本文使用最大Lyapunov指数研究了离心压缩机出口动压力的混沌特征。结果表明,稳定状态下离心压缩机出口动态压力的波动量小,频谱图分布较分散,具有较大的最大Lyapunov指数,混沌特征明显,系统的复杂度较高;当系统进入喘振状态后,压力序列表现出周期性,波动量变大,规律性变强,具有较小的最大Lyapunov指数,系统的复杂度降低。最大Lyapunov的值作为判断离心压缩机发生喘振的一个特征量,可以清晰的反映系统从稳态到喘振的变化过程,可应用于离心压缩机的防喘振设计。
