空间遥感器中心筒式主支撑结构设计与仿真*
2022-01-05孙凯鹏王泰雷
孙凯鹏,孙 杰,张 刘,王泰雷
(1.上海卫星工程研究所·上海·201109;2.吉林大学 仪器科学与电气工程学院·长春·130012)
0 引 言
空间遥感器的主支撑结构对于确保光学元件的位置精度、稳定性和可靠性而言具有重要的作用,也是空间遥感器的关键技术之一[1]。主支撑结构的主要作用是抵抗各种环境因素对光学元件造成的干扰。同时,空间遥感器也可通过主支撑结构来保持其整体性。特别对于大孔径高分辨空间遥感器而言,主次镜间距跨度较大,因此更需要高刚度、高稳定性的结构对其进行支撑。同时,也需要主支撑结构具有良好的动刚度,使空间遥感器适应严苛的火箭发射段振动载荷[2]。
为了达到上述研制目的,多种结构形式的主支撑结构被提出,如中心筒式[3-5]、桁架式[6-8]和框架式[9-11]等结构。筒式结构能够良好地适用于同轴式光学系统。最简单的筒式结构是简单的轴对称薄壁结构,这种结构具有制造难度低和加工周期短等特点,且它对轴向拉伸载荷具有良好的承受能力。但是,在轴向压缩载荷的作用下,薄壁结构极易发生失稳且局部弯曲刚度差。然而,一方面,在火箭发射过程中,空间遥感器往往承受着严苛的轴向振动载荷,这使得薄壁结构容易在振动载荷的激励下产生较大的响应,从而造成光学元件性能的退化甚至破坏;另一方面,单纯的薄壁结构容易发生轴向刚度不足以保证光学元件位置精度的现象,这种现象极大地影响了空间遥感器的成像质量。特别地,有高分辨成像需求的空间遥感器应极力避免上述两种情况的发生。因此,为了提高中心筒式主支撑结构的结构利用率及性能,应有针对性地采用不同的加强形式。
本文针对某高分辨型光学成像载荷,从光学系统指标和结构稳定性要求出发,分析并确定了结构构型和材料,给出了结构各个部位的临界应力计算方法;随后,通过尺寸优化方法设计了一种具有加强结构的中心筒式空间遥感器主支撑结构;最后,通过有限元分析方法得到了结构的静力学和动力学特性,验证了所设计的主支撑结构可满足各项指标要求。
1 空间遥感器简介
本研究针对的某空间遥感器为高分辨型光学成像载荷,它能够在高度为500km的轨道上实现星下点亚米级的全色对地像元分辨率。该遥感器的同轴三反式光学系统(Three-Mirror Anastig-mat,TMA)如图1所示。
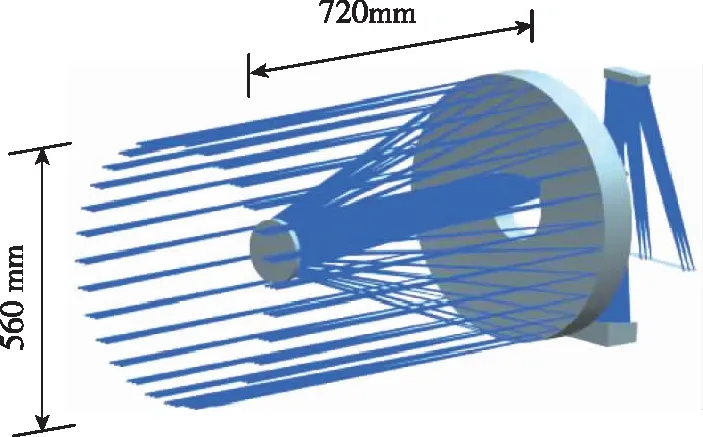
图1 高分辨型光学成像载荷光学系统
在光学模型中,可以使用偏移、偏心和倾斜来描述光学元件的刚体运动[12]。根据该空间遥感器的光学系统误差预算计算结果,次镜的刚体运动误差要求如表1所示。

表1 次镜误差要求
2 中心筒式主支撑结构设计
2.1 结构方案设计
空间遥感器主支撑结构的主要功能是支撑次镜组件。作为光学系统的重要组成部分,次镜的位置精度对成像质量有着极大的影响。中心筒式主支撑结构对空间遥感器的整体刚度的影响主要体现在轴向拉压刚度和横向剪切刚度上。对于具有不同加强结构的中心筒式主支撑结构,在同等的材料和构型的前提下,其轴向刚度基本相同,但横向剪切刚度却相差较大。其中,网格式加强结构的制造工艺复杂,且其中的环形筋对整体结构刚度的提升并不明显,因此结构利用率低。不同构型和不同材料的筒式结构没有绝对的限制,但是针对空间遥感器的应用场景,桁条加强型结构和钛合金材料具有较大的优势,且能够适用于这类结构的制造和使用。根据前文给出的光学系统布局形式,本文应用钛合金材料设计了一种具有桁条加强结构的中心筒式主支撑结构,如图2所示。
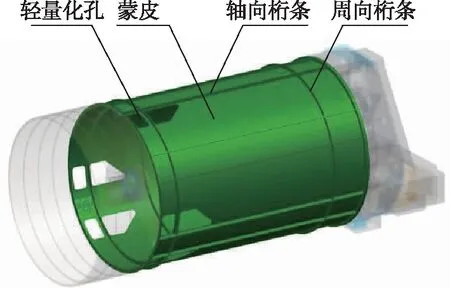
图2 中心筒式主支撑结构
本文设计的中心筒式主支撑结构由轻量化孔、蒙皮、轴向桁条和周向桁条组成。其中,蒙皮将其与结构连接在一起,使之构成一个完整的结构。此外,蒙皮也是一个重要的承力构件。出于对轻量化的考虑,蒙皮的厚度一般不会超过3mm,这就给蒙皮的制造提出了巨大的挑战。一方面,蒙皮厚度应足够均匀保证整体结构的稳定性;另一方面,在加工过程中,应保证蒙皮的形位公差,确保蒙皮无明显变形。因此,周向桁条是必要的。它能够在蒙皮加工过程中尽可能地保证结构的周向刚度。除蒙皮外,轴向桁条同样具有保证结构具有较高的轴向刚度和抗弯刚度的作用。这主要体现在:一是能够承受轴向拉压载荷;二是对蒙皮提供支撑,避免发生失稳现象。
2.2 材料选择
一般而言,中心筒形的结构件可选择多种具有成熟加工工艺的材料。由于航天器及空间遥感器所处的力热环境恶劣,比刚度和热膨胀系数等材料参数往往被优先考虑。可用作航天用途的材料目前有铝合金、钛合金、铟钢、碳化硅和碳纤维复合材料等[13]。材料参数如表2所示。
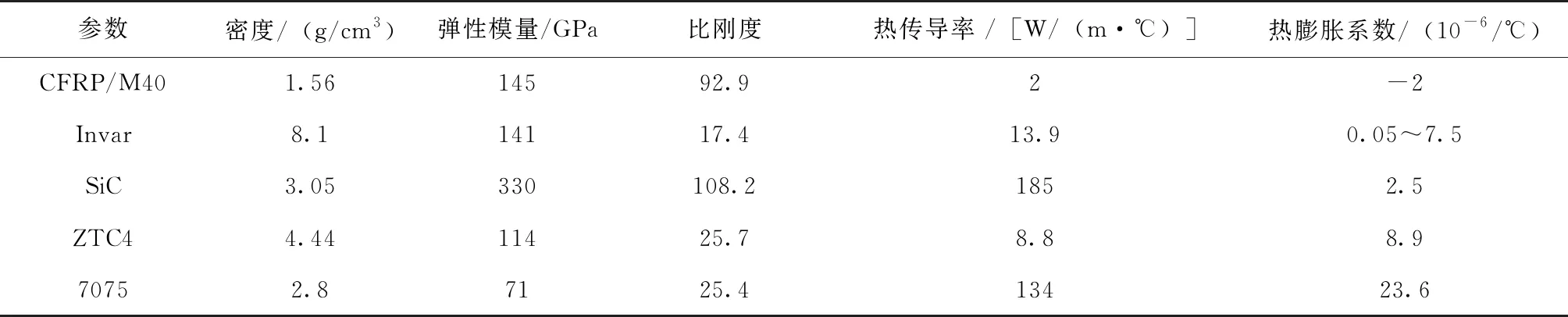
表2 主支撑结构的材料参数
在金属材料中,铟钢可以通过调制其成分配比,使其自身接近零膨胀。但是,铟钢的比刚度较差,往往被应用在光学元件的局部支撑中。铝合金与钛合金具有较为接近的比刚度值,且铝合金具有极佳的工艺性能,能够适用于一般用途的航天器结构件。但是,由于组成空间遥感器的结构件的热膨胀系数应尽可能低,因此钛合金是主支撑结构中较佳的材料选择。碳化硅和碳纤维复合材料在材料性能上均具有明显优势,二者不仅能显著地改善空间遥感器的力学性能,其可节省的质量也非常可观。但是,相比于金属材料,碳化硅和碳纤维复合材料的制造工艺极为复杂,且在轻量化到达一定程度以后,无法继续进行开孔减重。
3 分析计算
在方案阶段的初步设计中,可以采用简单的经验公式来估计结构的失稳强度。下面分别对中心筒式主支撑结构的失稳情况进行分析计算。
3.1 蒙皮的临界应力
蒙皮是整体结构中最重要的组成部分,相邻桁条之间的蒙皮可视为曲状薄板,应用长条曲状薄板的近似公式计算蒙皮的临界应力,如下所示
(1)
3.2 桁条的临界应力
桁条一般为薄壁杆件,其在受到轴向压缩时可能失稳,对桁条的整体失稳和局部失稳情况分别做出考虑。
(1)整体失稳
在弹性变形范围内,桁条整体失稳的临界应力为
(2)

(2)局部失稳
在局部失稳的分析计算中,往往将桁条按照长矩形薄板进行计算。在弹性变形范围内,其局部失稳临界应力计算公式为
(3)
式中,bs为桁条的宽度;ts为桁条的厚度;Es为桁条材料的弹性模量;ν为桁条材料的泊松比;K为支持系数,取决于边界条件。
3.3 轻量化孔应力分析
为了进一步对筒体结构进行轻量化设计,需要在蒙皮上设计轻量化孔。但是,开孔会使得载荷重新分配,甚至产生应力集中,降低结构的刚度和强度。因此,开孔孔径不仅要远远小于蒙皮的高度和周长,且需要进行分析和预测。现实情况中,轻量化孔往往形状较为复杂。本文将其简化为圆孔,进行计算分析。
沿一个主轴均匀拉伸应力p作用时的孔边应力σθ为
(4)

4 中心筒式主支撑结构优化设计
4.1 优化模型
虽然具有桁条加强的中心筒式主支撑结构具有较好的性能,但是其材料尺寸分布并未进行优化设计。因此,为了在提高中心筒式主支撑结构的动力学与静力学性能的同时使结构具有较低的质量,有必要对结构进行尺寸优化设计。为了进一步在确定的设计下提高结构性能,需建立包括基频和次镜位置精度在内的优化目标综合加权值W(ρ),如下所示
W(ρ)=w1f1st+w2ΔXg+w3Δθg
(5)
式中,ρ代表设计变量;f1st代表基频;ΔXg代表重力作用下次镜的偏心;Δθg代表重力作用下次镜的倾斜;w1、w2和w3分别代表三者的权重。这里,令w1=w2=w3=1。
同时,以结构的蒙皮T1、轴向桁条T2和周向桁条T3为设计变量,以质量为约束条件,建立尺寸优化数学模型,如下所示
(6)

4.2 优化结果
根据前文主承力结构的设计结果,通过Hypermesh建立其有限元模型,如图3所示,并通过Optistruct执行优化过程。经过18步迭代,得到优化结果并圆整取值,结果如表3所示。
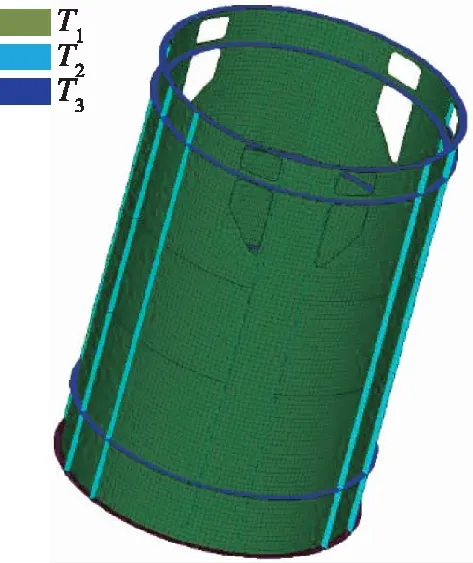
图3 有限元模型
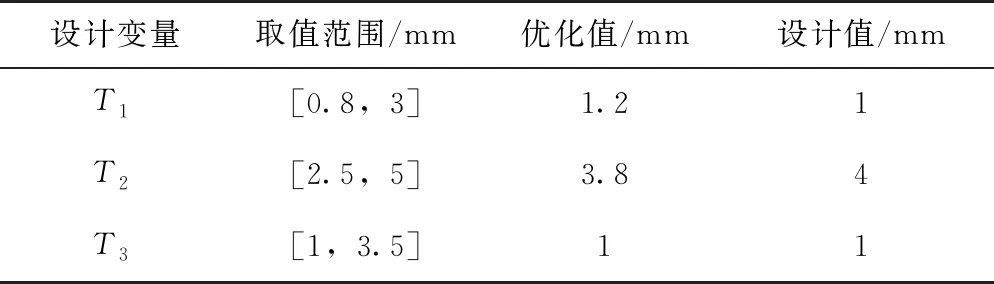
表3 设计变量优化结果
根据光学元件尺寸及安装关系,且经过优化并圆整取值后,完成结构设计。中心筒式主支撑结构的总质量为12.8kg,占整机质量的15%。在优化约束范围内,在保证结构的基频和位置精度最优的同时,相机得以大幅度减重。
5 有限元分析
5.1 静力学分析
虽然空间遥感器是在微重力条件下使用的,但是主支撑结构的全部检测工作是在地面实验室中完成的。主支撑结构在重力作用下的运动与形变均会在空间中恢复,从而造成光学系统的性能退化[14]。通常情况下,空间遥感器的光学检测与装调是在光轴垂直于重力方向的状态下进行的。在这个过程中,结构受到了侧向重力的影响。为了考察,现对其进行静力学有限元分析,分析结果如图4和表4所示。
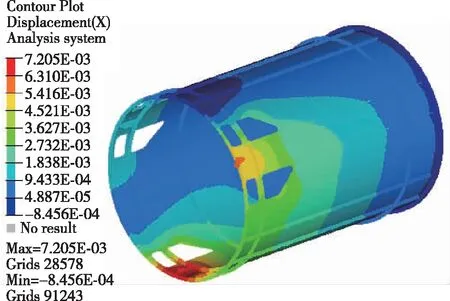
图4 静力学有限元分析结果云图

表4 静力学有限元分析结果
分析结果表明,在侧向重力状态下,次镜在重力方向的刚体偏心值为7.8μm,刚体倾斜值为6.9″,二者均满足表1所要求的光学公差值。这个仿真结果证明了所设计的结构具有足够的静态刚度,可保证次镜的位置精度。
5.2 模态分析
模态分析可以提供结构体在任意约束条件下的固有频率和振型[15]。现约束中心筒式主支撑结构有限元模型的安装位置以模拟其装配状态,然后进行模态分析。结构的前三阶固有频率和振型如表5所示,该结构基频达到了162.4Hz,远高于一般卫星平台对光学载荷的要求(100Hz),说明该结构具有足够的动态刚度,满足设计要求。
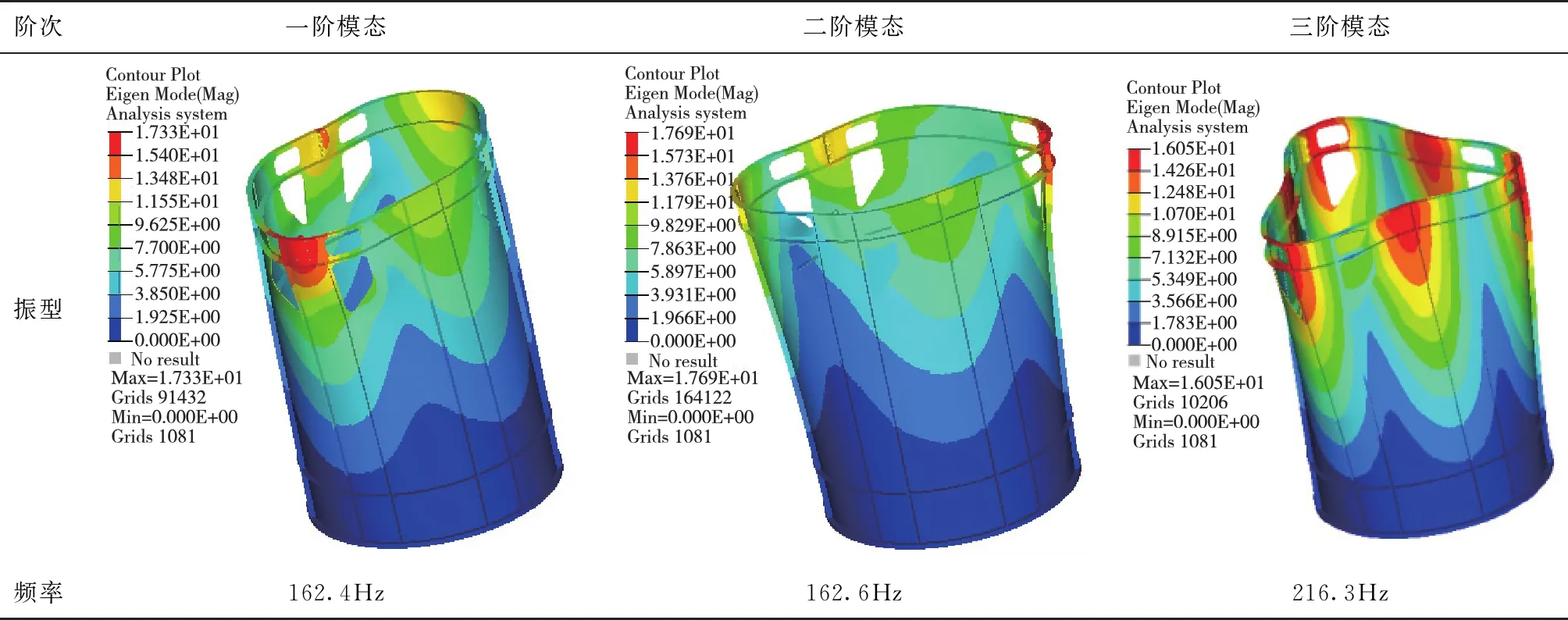
表5 模态分析结果
5.3 正弦振动分析
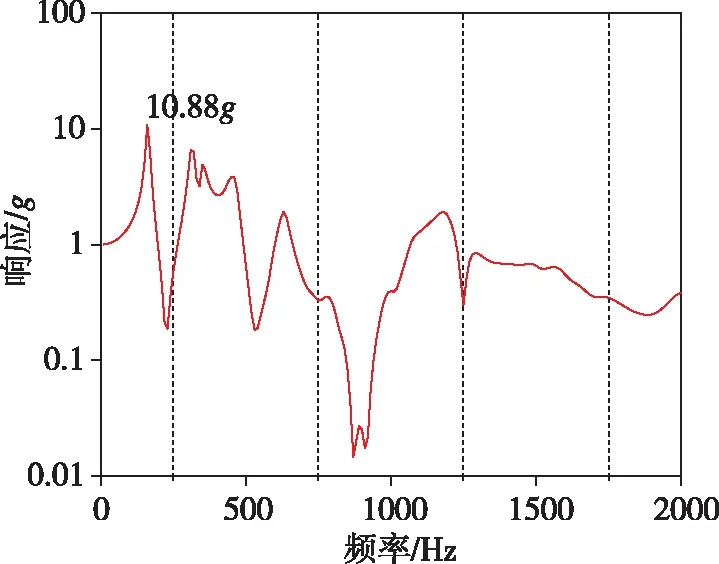
正弦振动分析是结构在正弦扫频激励下的响应分析,振动输入条件如表6所示。本文通过动力学有限元分析,得到了在0~2000Hz范围内对结构的约束部位进行1g(g=9.81m/s2)加速度激励下的次镜镜面频率响应曲线(如图5所示)。
(a)水平向

表6 正弦振动分析输入条件
从分析结果中可以看出,水平向的正弦振动激励响应峰值为17.62g,轴向的正弦振动激励响应峰值为10.88g。对于一般通过光学环氧胶粘接并固化的次镜组件而言,能够适应该加速度响应量级的振动。相应地,此时中心筒式主支撑结构的应力云图如图6所示。水平向振动最大应力为17.1MPa,出现在结构顶部环形加强筋处。轴向振动最大应力为6.6MPa,出现在结构顶部轻量化孔处。由分析结果可知,结构各处基频共振处的应力值均远小于钛合金材料许用应力值,因此本文设计的中心筒式主支撑结构对正弦振动的抵抗性良好。

(a)水平向
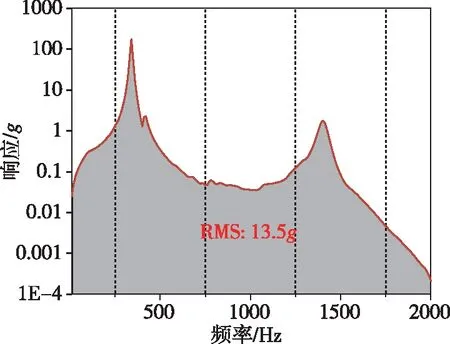
5.4 随机振动分析
相机在进入既定工作轨道前,除了要受到简谐运动形式的强迫振动,还要受到大量级的随机激励的力学环境影响,随机振动分析的振动输入条件如表7所示。本文通过动力学有限元分析,得到了10~2000Hz频率范围内的均方根值(Root Mean Square, RMS)共14.35g。随机振动输入的次镜镜面的加速度响应曲线如图7所示。
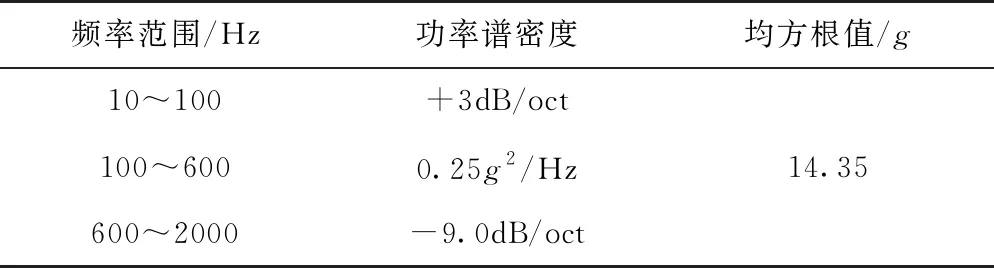
表7 随机振动分析输入条件
(a)水平向
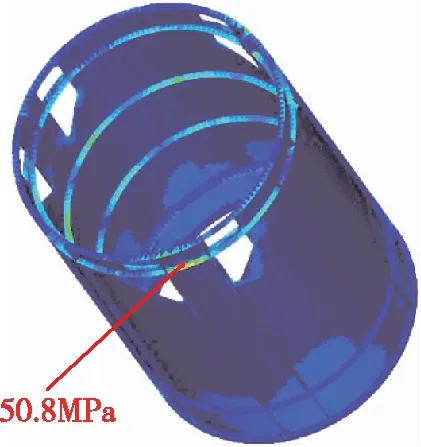
从分析结果中可以看出,水平向的随机振动激励响应RMS值为4.3g,轴向的随机振动激励响应RMS值为13.5g。对于一般通过光学环氧胶粘接并固化的次镜组件而言,能够适应该加速度响应量级的振动。相应地,此时中心筒式主支撑结构的应力云图如图8所示。水平向振动应力RMS最大值为50.8MPa,出现在结构顶部环形加强筋处。轴向振动应力RMS最大值为15.8MPa,也出现在结构顶部环形加强筋处。由分析结果可知,结构RMS应力值均远小于钛合金材料的许用应力值,因此本文设计的中心筒式主支撑结构对随机振动的抵抗性良好。
(a)水平向
6 结 论
本文针对某高分辨型光学成像载荷,从光学系统指标和结构稳定性要求出发,设计了一种具有加强结构的中心筒式空间遥感器主支撑结构。首先,介绍了同轴三反式空间遥感器的结构形式和光学系统指标要求。通过对任务需求的分析,给出了中心筒式主支撑结构的构型方案和材料选择;然后,根据临界应力理论,计算并分析了蒙皮结构、轴向桁条结构、桁条加强和轻量化孔结构的失稳强度;其次,建立了尺寸优化数学模型,优化后结构总质量为12.8kg,占整机质量的15%。在优化约束范围内,保证了在结构的基频和位置精度最优的同时,相机得以大幅度减重;最后,建立了中心筒式主支撑结构的有限元模型,并分析了结构的静力学和动力学特性。有限元分析结果表明,在侧向重力状态下,次镜在重力方向上的刚体偏心值为7.8μm,刚体倾斜值为6.9″,二者均满足光学系统公差。该结构基频达到了162.4Hz,远高于一般卫星平台对光学载荷的要求(100Hz),说明该结构具有足够的动态刚度,满足设计要求。正弦振动和随机振动分析结果表明,结构的应力响应值均远小于钛合金材料的许用应力值,因此本文设计的中心筒式主支撑结构对振动的抵抗性良好。
